
基于系留载平台组网的无源定位研究
2016-12-20 08:07范翔宇王红卫
现代雷达 2016年3期
范翔宇,王红卫,陈 游,张 毅
(1. 空军工程大学 航空航天工程学院, 西安 710038)(2. 中国人民解放军94070部队, 西安 710016)
·总体工程·
基于系留载平台组网的无源定位研究
范翔宇1,王红卫1,陈 游1,张 毅2
(1. 空军工程大学 航空航天工程学院, 西安 710038)(2. 中国人民解放军94070部队, 西安 710016)
系留载平台可以实现高远程预警与持续悬停于空中,适用于空基组网实现无源定位。以系留载平台为对象,对比系留载平台与陆基和空基运动平台,归结其特有的优势与军事价值,对系留载组网无源定位进行分析。依托系留载组网,首先构建典型的三系留载体系结构,再采用盲信号处理方式从复杂电磁环境分选识别出威胁信号;最后,采用“定位精度的几何稀释”对误差进行深入分析,构建数学模型,提出最佳定位点的选取并进行仿真验证。该文为后续的日后无源定位的布站应用提供借鉴。
系留载平台组网;盲信号处理;定位精度的几何稀释;最佳定位点
0 引 言
由于系留气球载雷达系统具有覆盖范围大、低空探测能力好、生存能力强、效费比高等优势,已逐渐成为国土防空和沿海预警探测情报网中的重要组成部分[1]。空天预警能力直接影响着国土安全,远程长时和高精度的警戒能力直接决定着战争的主动权甚至最终的成败。多数来袭平台和武器系统使用的雷达作为其主要探测设备,为此提升对来袭目标雷达的探测能力,本文以具备全天候使用,探测距离远,精度高,工程实现技术成熟优势的系留载无源探测系统为对象,研究其对雷达的无源探测预警能力。
我国研制的系留载雷达“金雕”可在1000m的高空对方圆10km以内的诸如火柴盒等微小目标进行成像识别,能够在空中执行任务长达15个昼夜,并具备抗10级台风和雷暴天气的优势,其潜在的军用价值难以估量[2]。
目前,世界上能够生产系留气球载雷达系统的国家主要有美国、以色列、法国、俄罗斯等[3]。美军空军空中作战司令部己经将系留载雷达部署在南部边境地区,同时也将其广泛应用在对伊拉克、阿富汗的战争中。基于本土的典型应用有JLENs国土导弹防御网络传感系统、RAID系留气球快速布防系统、REAP系留气球快速升空系统、PTDS长期反恐监测系统、及MARTS海军空中中继系统等。挪威Tyra Invest AS公司、英国AllsoppHelikite公司和Noesis./ Lindstrand公司也提出了自己的系留气球ISR概念,即一种特殊的情报、监视、侦察及通信平台,将为特种作战部队提供一种经济的解决方案,以提高部队执行发现、确定和摧毁敌人以及保护友军等任务的态势感知能力[4-6]。
我国系留载平台的军事应用相对滞后,尤其对战略战术层面的优化配置关注有待进一步开发。本文从系留载平台的组网应用出发,首先介绍系留载平台自身的优势,再从组网实现无源探测入手,构建典型三系留载平台的典型结构,选取盲信号分离算法并协同组网内资源调度,实现对混杂信号的快速精确分选;最后讨论其定位误差,根据推导结果提出最佳定位点并仿真验证,为后续多站甚至自适应布站提供理论指导。
1 系留载平台自身特性
1)预警时间长,探测距离远。登高望远是驱动系留平台发展的动力所在,受到地球曲率的影响,地面平台受到视距的限制,探测距离大大折扣,如图1所示。
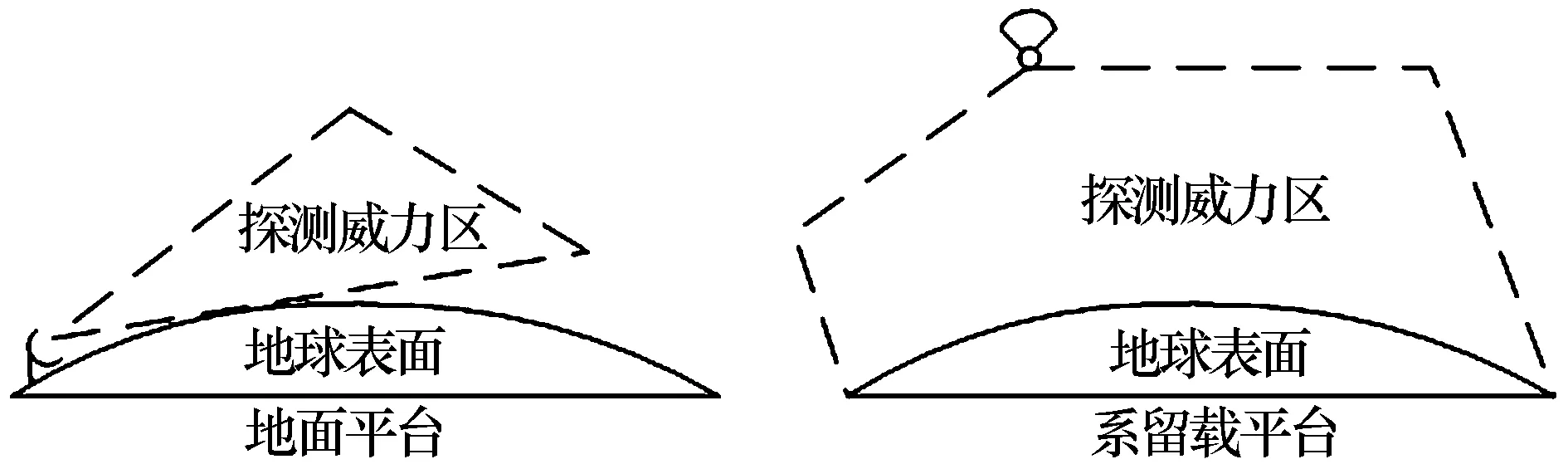
图1 地面平台与系留载平台威力探测区对比
通过图1可以直观地看出,我方系留载平台高度越高,探测性能受到地球曲率的影响越小,探测范围越大,能够提供预警的时间就越长。
2)生存能力强。系留载平台可以采用复合材料降低其金属含量,使得体积接近10 000 m3的平台的RCS接近于2 m2。系留载平台本身的造价并不高,目前能够对高空构成威胁的武器系统稀少且昂贵,除非军事需要,否则不可能采用此类武器对系留载平台实施打击。美军曾实验使系留气球气囊受损,其依旧可以在空中飘落2 h后安全着陆。
3)不易被探测。由于系留载平台近似悬停于空中,对应的多普勒频率较小,来袭平台PD雷达滤波器组无法实现有效探测。致使火控雷达失去了至少40 dB的动目标探测(MTD)改善因子,作战效能大打折扣。系留载平台不具有发动机等能够被红外探测到的装备,光学平台也无法实现有效探测。星载SAR平台的主瓣宽度很小,而且SAR平台的频率非常稳定,难以实现脉冲捷变甚至重频抖动等抗干扰措施,星载SAR雷达为防止参数被截获,开机时间通常不超过1 min。即使被SAR侦察到,我方系留载平台也会接收到敌方SAR雷达的脉冲描述字,对于我方构建情报体系和日后对SAR平台的干扰研究意义重大。
4)系留载平台效费比高。由于本身成本相较预警机或侦察机要低廉许多,可以长时间悬停于空中,消耗的能量很少,设备老化与损坏的概率有所下降,便于研制生产与使用维护,平台可靠性大大提高,能够实现对既定区域进行长时侦察。
5)系留载平台可用于构建杂波数据库。目前杂波模型的构建基于长期的数据积累。系留载平台可以长期悬停于空中某处,对某一区域实施长时的观测,得到大量不同条件下的杂波数据。此类实验在国内开展的较少,我国对于杂波模型的研究本身就滞后于国外。系留载平台有利于杂波理论的研究与其数学模型的构建。同时,长时间对于某一区域进行观测,可以形成该区域的距离—杂波门。将得到的杂波数据共享给不同的作战平台,便于作战平台通过信号处理系统做相关解算,采用杂波对消,进一步加强对该区域的侦察与检测。
6)陆基无源探测平台的机动性较弱,敌方通过侦察或者情报途径得到布防位置后,陆基无源探测的隐蔽性几乎丧失,军用价值大打折扣。同时,陆基大型平台难以移动,无法实现二次利用。机载无源探测设备的稳定性差,其定位精度受到设备的严重制约,同时还要克服运动补差、时间同步等技术难题,难以通过机间链实现组网应用,单机系统的定位误差并不可观。而系留载平台不受上述条件限制,可以实现快速布防与组网应用。其军事价值亟待开发。
2 三系留载平台组网盲信号分离
现代空间中电磁信号已达到百万个/秒量级,关于敌方雷达参数先验信息有限,敌方雷达为降低被我方侦收到的概率,力求向低截获概率雷达(LPI)方向发展,更增加了对敌信号识别的难度。
因此,本文采用瞬时盲信号分离的方法实现复杂混叠信号的分离。本文采用的算法是现今主流而且成熟的,保证算法的收敛性、实时性与可行性,仿真对比了EASI、RLS、NRLS三种算法的处理效果,得到结果图,如图2所示。
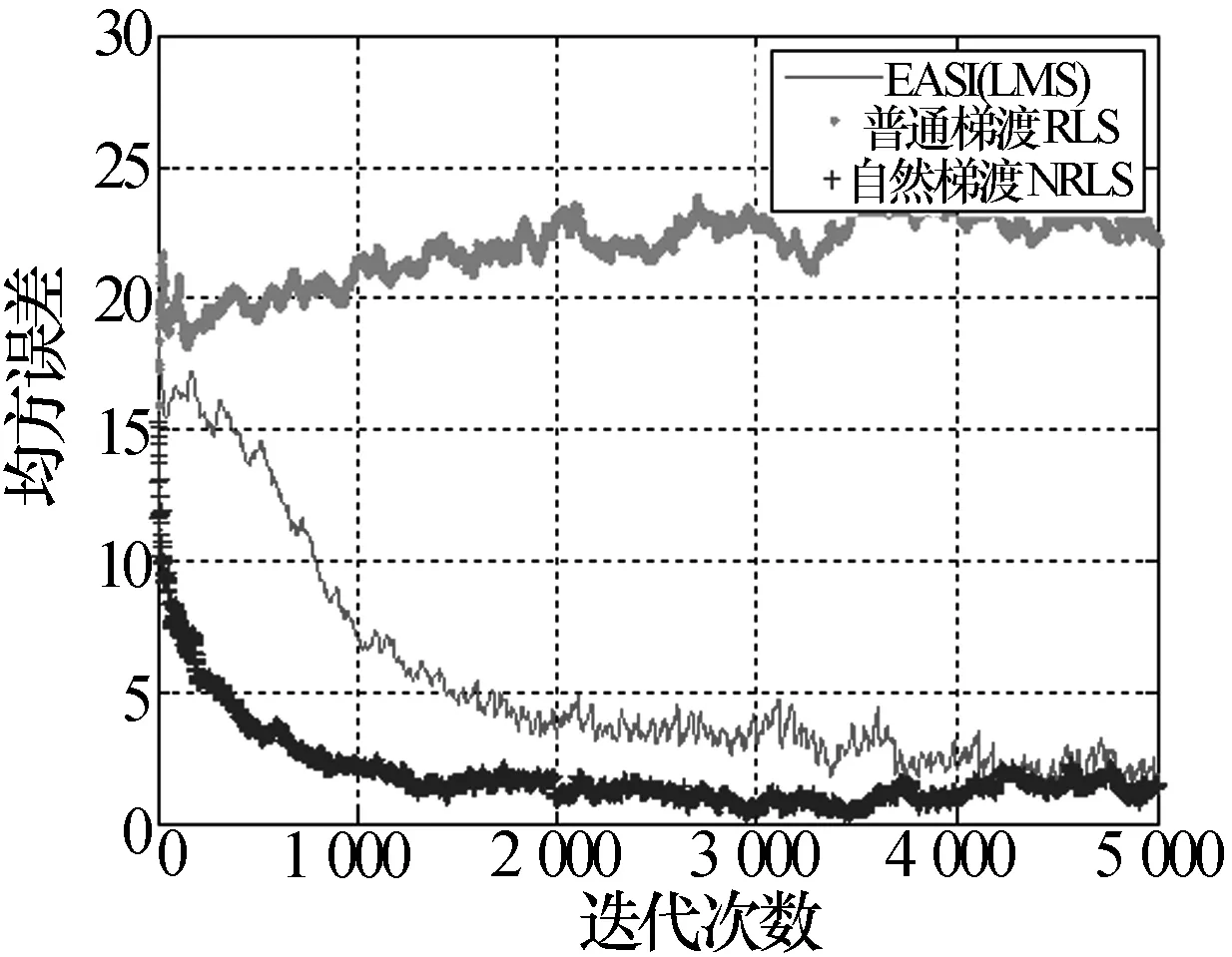
图2 三种算法的学习曲线
观察图2可以发现RLS学习效果较NRLS算法与EASI算法差,通过多次迭代后,NRLS算法与EASI算法已经趋于收敛,且NRLS的收敛效果最为明显。
图3中第一行为两种信源信号与高斯白噪声,其中x轴为时间/秒,纵轴为信号幅度。由于现代战机采用脉冲调制,在信源信号中设定了两种脉冲调制信号,即图3中的前两行波形。图4~图6分别为EASI、RLS和NRLS算法的处理结果。从上图中可以看出NRLS分离结果最优,EASI其次,NRLS方法的效果很不明显。
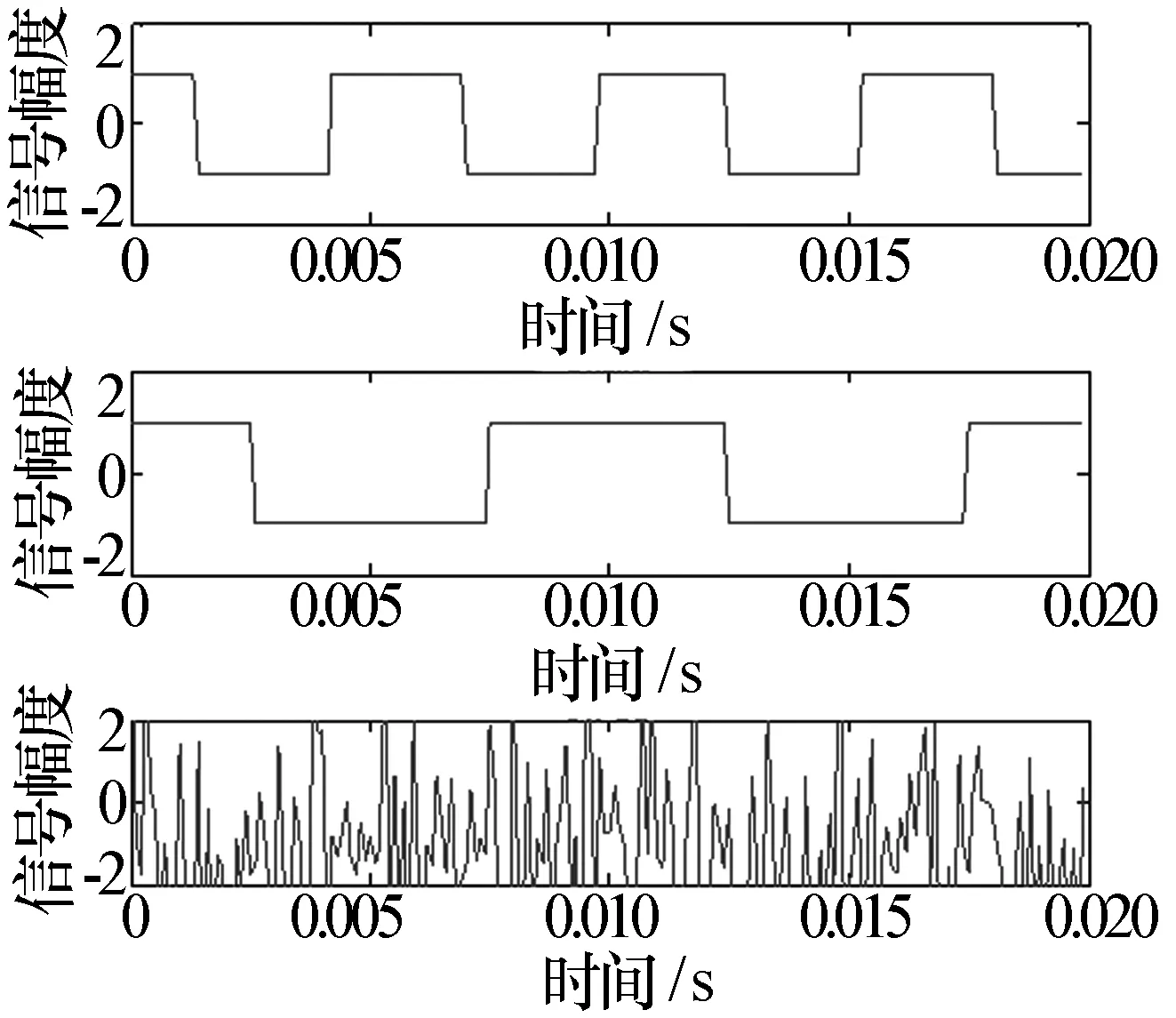
图3 三种信源信号
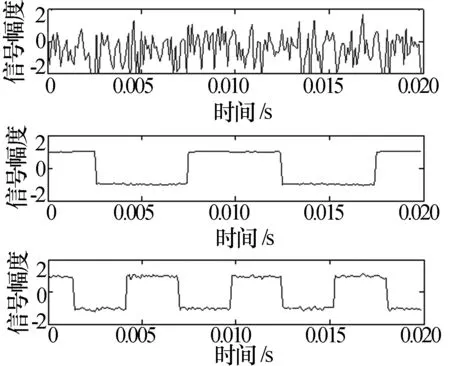
图4 EASI算法处理结果
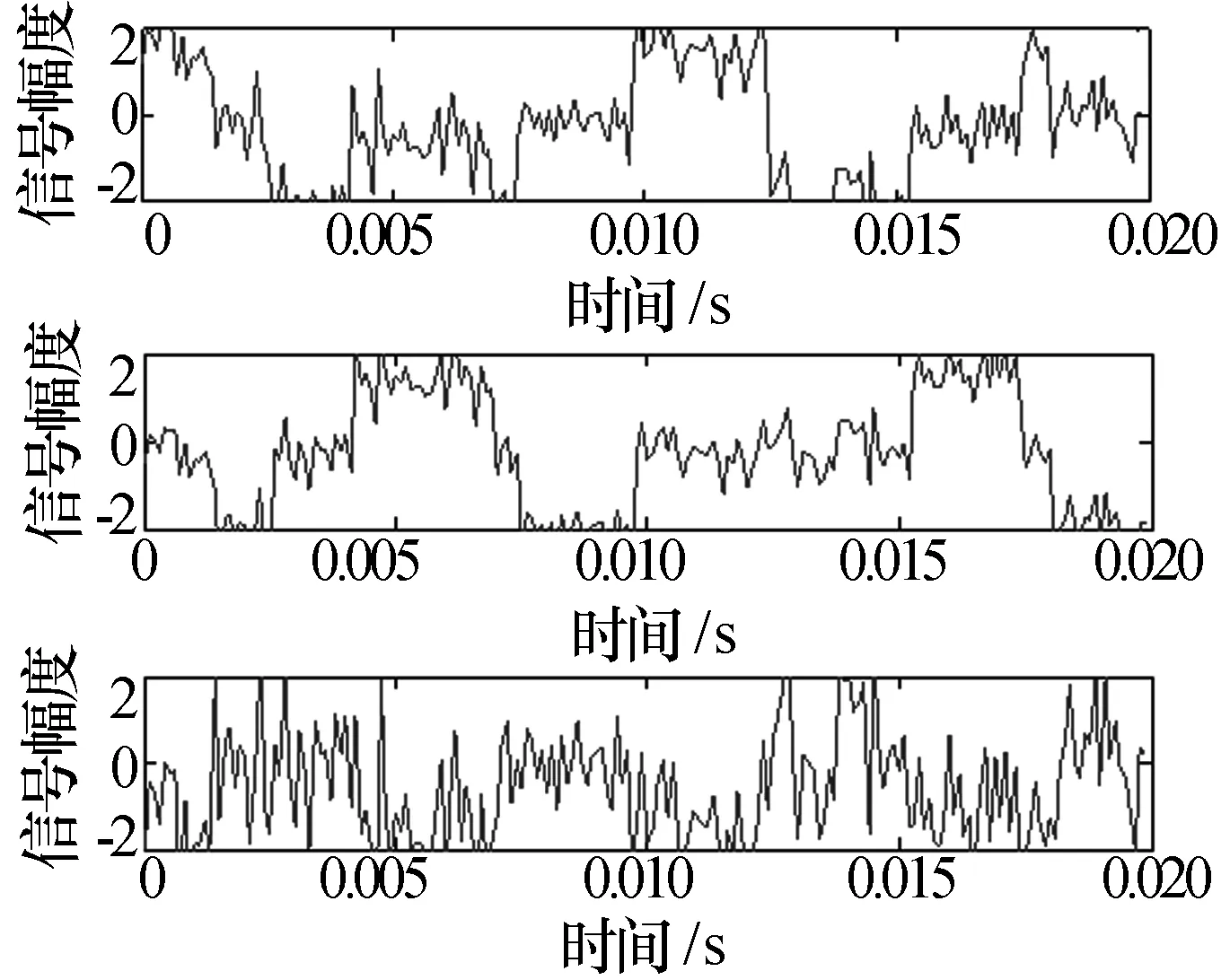
图5 RLS算法处理结果
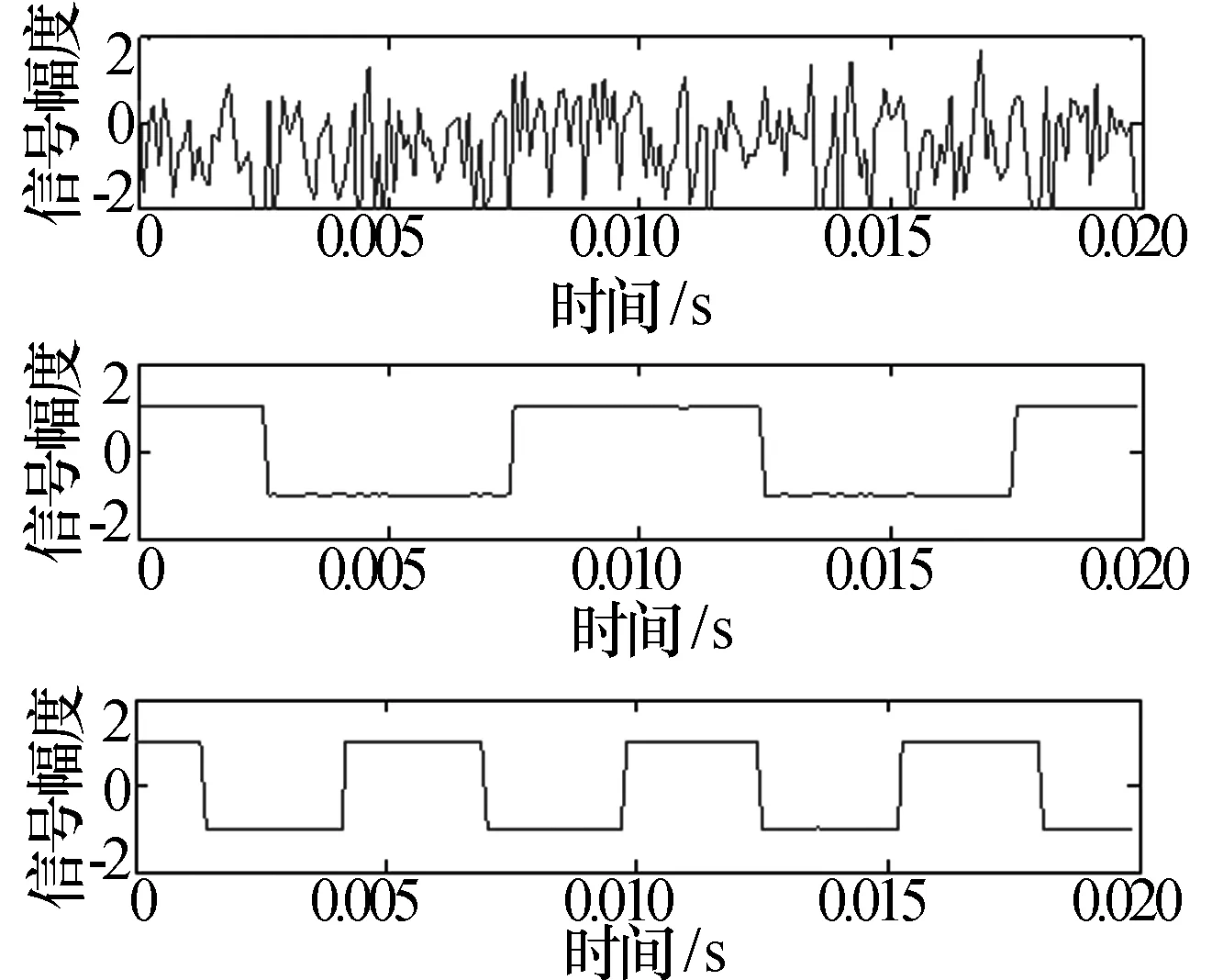
图6 NRLS算法处理结果
对比三种算法的实时性,对三种算法进行100次蒙特卡洛实验,计算运行时间的平均值,得到结果如表1所示。
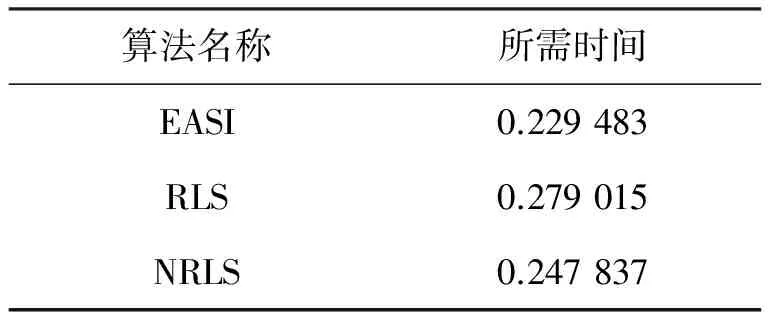
表1 三种盲信号算法消耗时间的对比s
通过表1可以看出,EASI算法所需要的时间最短,其次为NRLS,RLS算法耗时最长。
本文基于三系留载平台组网。组网的目的就是实现资源的整合与高效利用。无论实际信号处理流程采用哪一种算法,必然要在处理精度与实时性之间进行抉择,无法兼顾实时性与准确性;而如果采用EASI、RLS与NRLS算法串行处理,所消耗的时间为三者时间的累加。因此,本文协同调度空基组网内资源,采用并行处理方式以保证信号的精度与实时性,具体原理如图7所示。
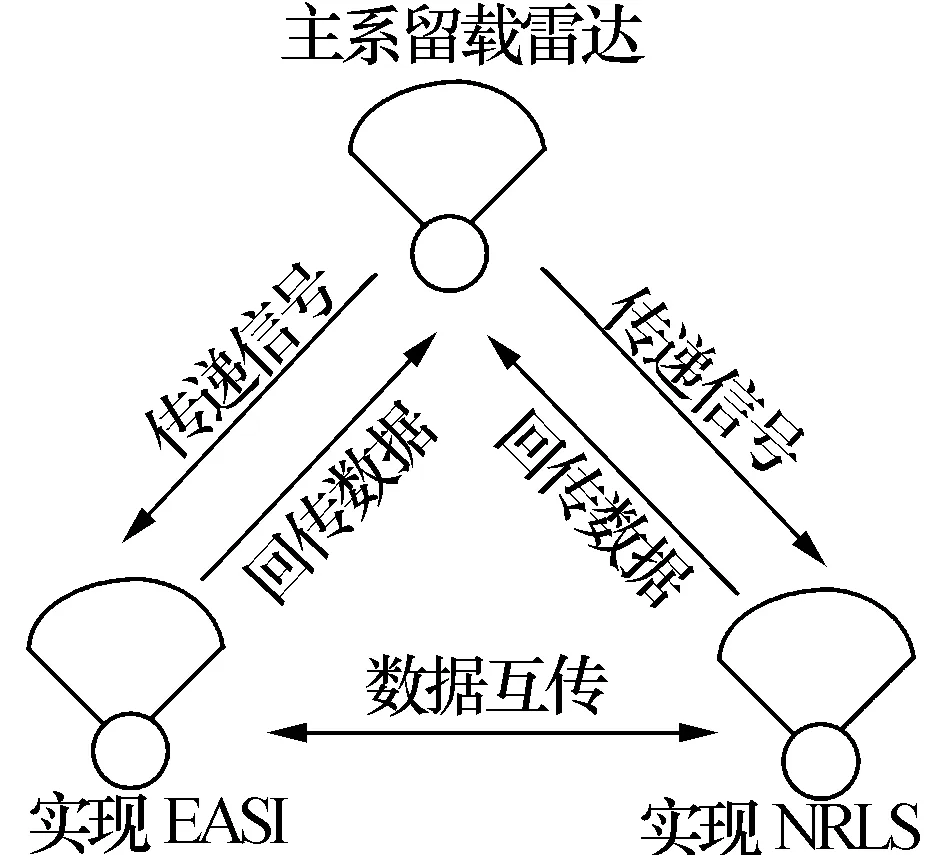
图7 三系留载平台盲信号处理示意图
三个系留载平台之间在平时监视时没有主次之分,均采用EASI算法或NRLS算法对所在空域实施监视。而当三者中的某一个平台采用盲信号处理,出现了无法判别的信号时,该平台立刻上升为主系留载平台,将侦察到的数据传递给另外两个平台,并引导另外两个平台对该区域实施重点探测,主平台负责主程序的处理,另外两个平台采用不同算法,兼顾精度与效率,提取出信号记录平台的全脉冲参数,用于后续的鉴别,从而实现对信号的甄别与对该区域的有效探测。
3 三系留载平台无源定位误差分析
双基地平台的无源定位仅具有典型性,现今雷达以组网形式工作,研究三基地无源定位可以为后续的多平台组网布站、自适应布站等研究奠定基础。
由于实际测量过程中得到的角度θ1、θ2和θ3必然存在误差,设测角误差分别为δθ1、δθ2和δθ3,这样三个系留载平台测向的交点会形成一个不确定的模糊区域,如图8所示。
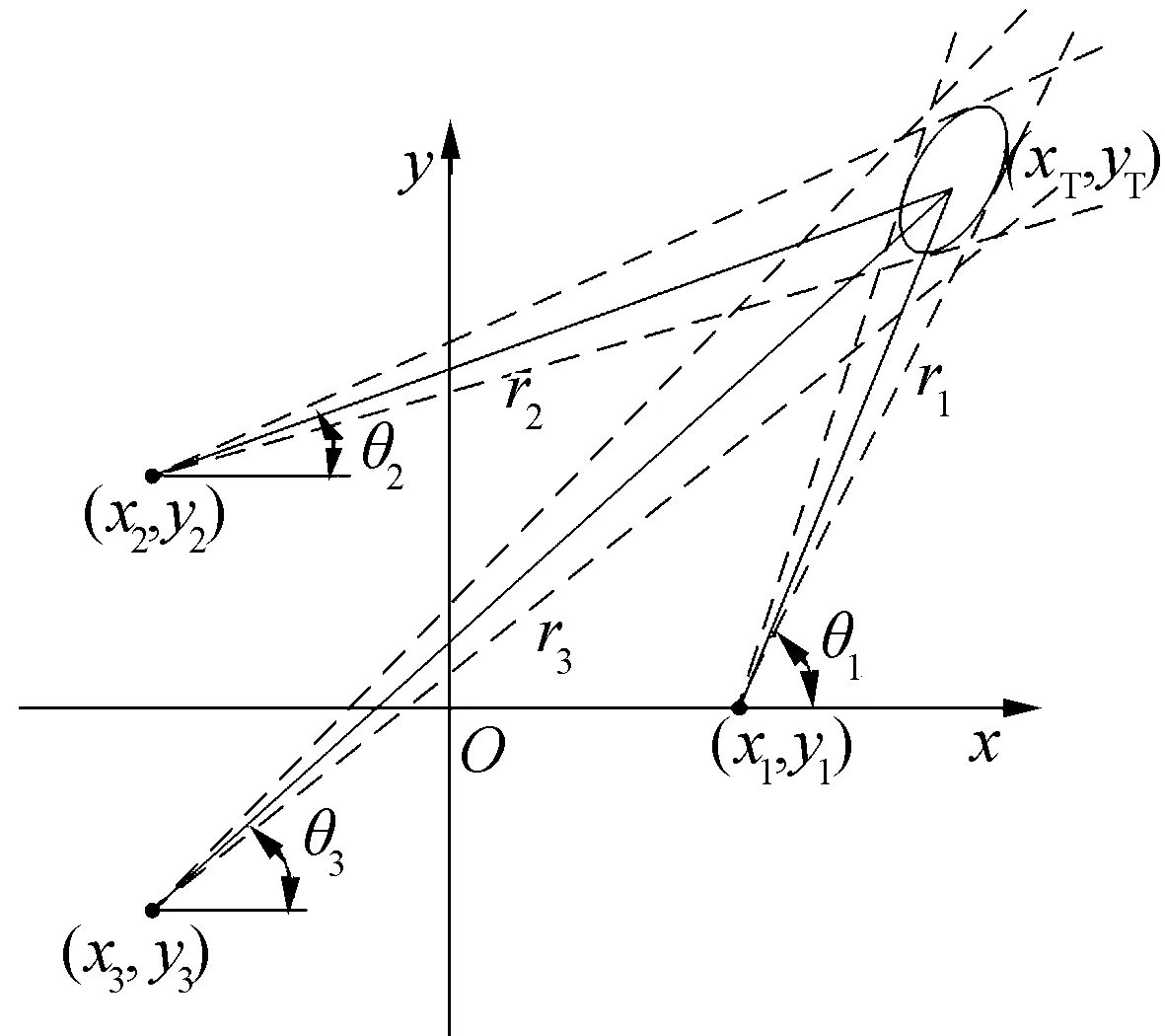
图8 三系留载平台无源测向定位原理及误差示意图
系统噪声产生定位误差,定位点在真实位置附近呈现随机分布,本文假定测向误差为标准高斯分布,定位点的定位误差随机分布呈现椭圆形状,如图5所示。本文采用“定位精度的几何稀释”,即GDOP来描述定位误差,它用式(1)表达,即
(1)
式(1)描述定位误差的三维分布。本文考虑到Z方向的误差相对X和Y方向而言影响很小,如果在实际中运算Z方向,那么计算量将会从信号采样点数n的平方次直接逼近立方次运算,时效性很容易丧失,效费比大打折扣,因此在二维平面内描述定位误差在平面上的分布,则用式(2)表示
(2)
1)定位误差的分析
根据图8的几何关系,得到目标T与3个定位点之间的关系如式(3)所示
(3)
对三系留载平台定位的误差进行分析。假设各系留载平台之间的测向误差相互独立。对式(3)求偏导,整理后可得
A·δX=B
(4)
其中
定位误差
通过对式(3)或者式(4)的观察可以发现,待求解的未知参数只有两个。因此,只需要2个方程即可。此处,即可体现出三系留载平台组网的优势。三系留载平台所得到的结果为三组方程解的交集,探测精度与探测范围明显优于双基地平台。
通过计算双基站定位GDOP。整理式(4)可以得到定位误差为
δX=A-1BCB
(5)
其中
(6)
(7)
故可以得到定位误差的几何稀释为
(8)
整理得到下式
(9)
式中:l为两个系留载平台之间的距离;σθ为平台测向误差的标准差。
2)无源定位的最佳定位点
如果GDOP取得最优值,偏导为零,即
(10)
故可以得到方程
(11)
解式(11)可以得到
sin2θ1=sin(-2θ2)
(12)
假定0≤θ1≤π/2时,对式(12)进行分类讨论,得到以下三种情况:
(1)θ1=-θ2,定位线无交点,此时无法定位;
(2)θ1=θ2=0,目标在两点连线上,此时双基地无法定位,应用三基地实现定位;
(3)θ1=π-θ2,两条测向线形成的同旁内角相等,即最佳定位点位于底边中垂线上时。
3 仿真验证
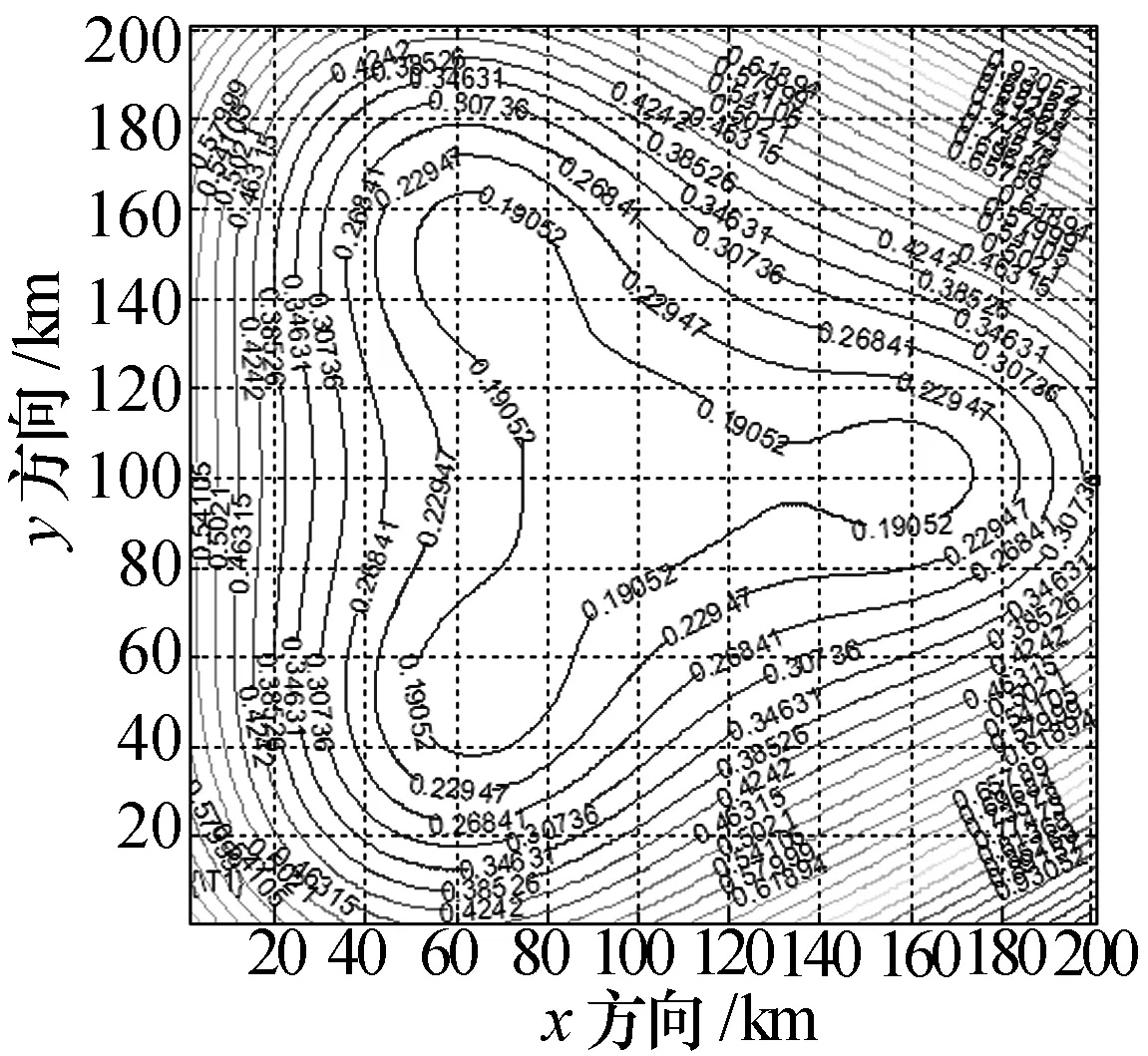
通过前文分析,当采用三站定位时,三点呈现正三角形时可以达到最优的定位效果。本文选定在同一坐标系内,三个系留载平台分别位于(50km,0km)、(-25 km,-43.3 km)和(-25 km,43.3 km)处,原点为(0 km,0 km),可以计算得到无源测向定位的GDOP分布等高线图,同时从影响定位误差的角度出发,分别讨论不同的l和σθ对定位误差的影响。得到仿真图如图9~图10所示。
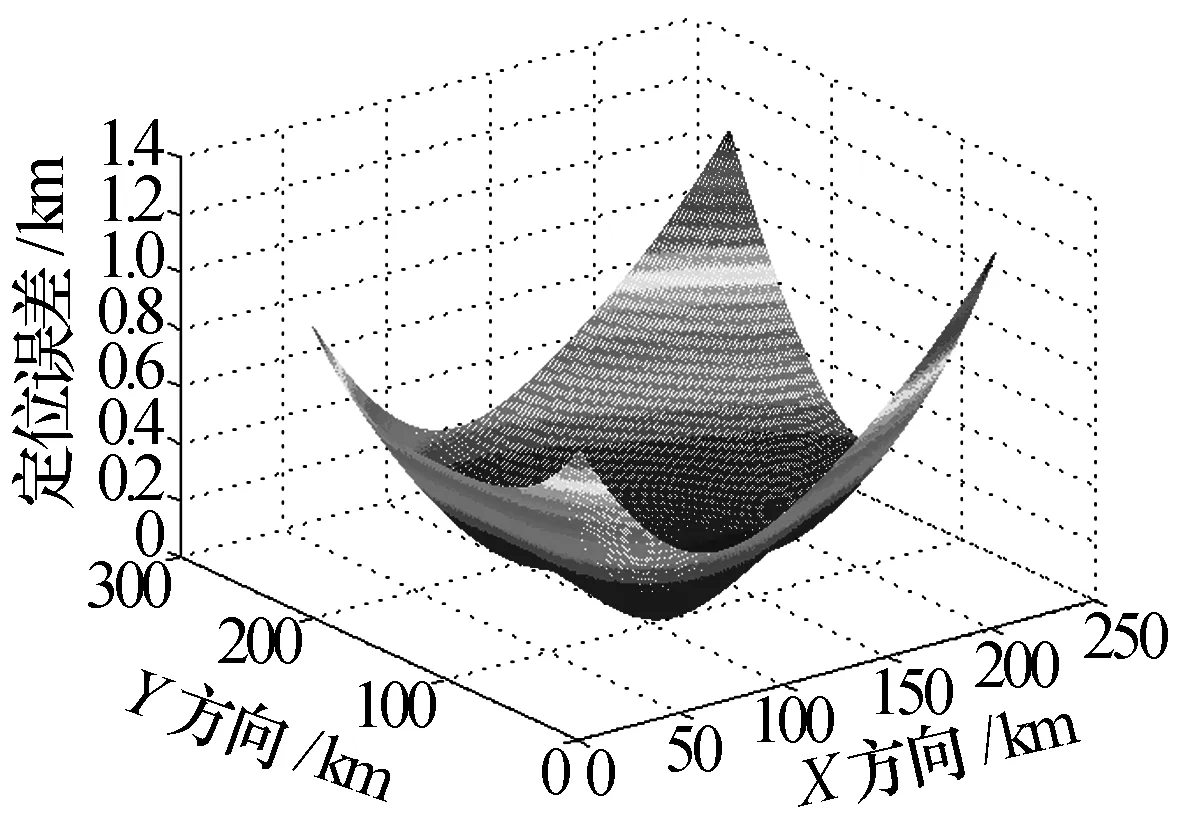
图9 三系留载平台定位的GDOP三维图
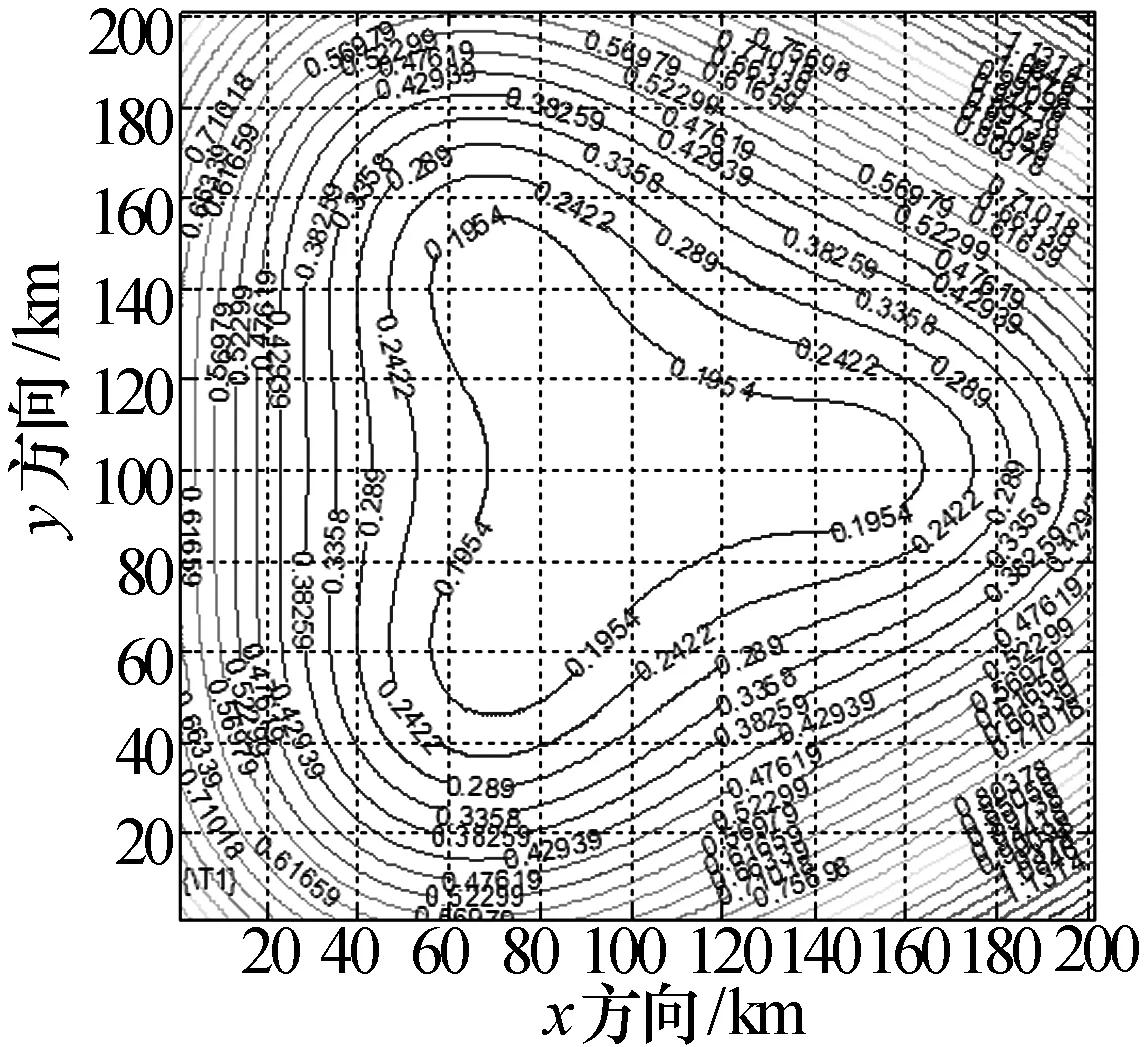
a) σθ=0.5°
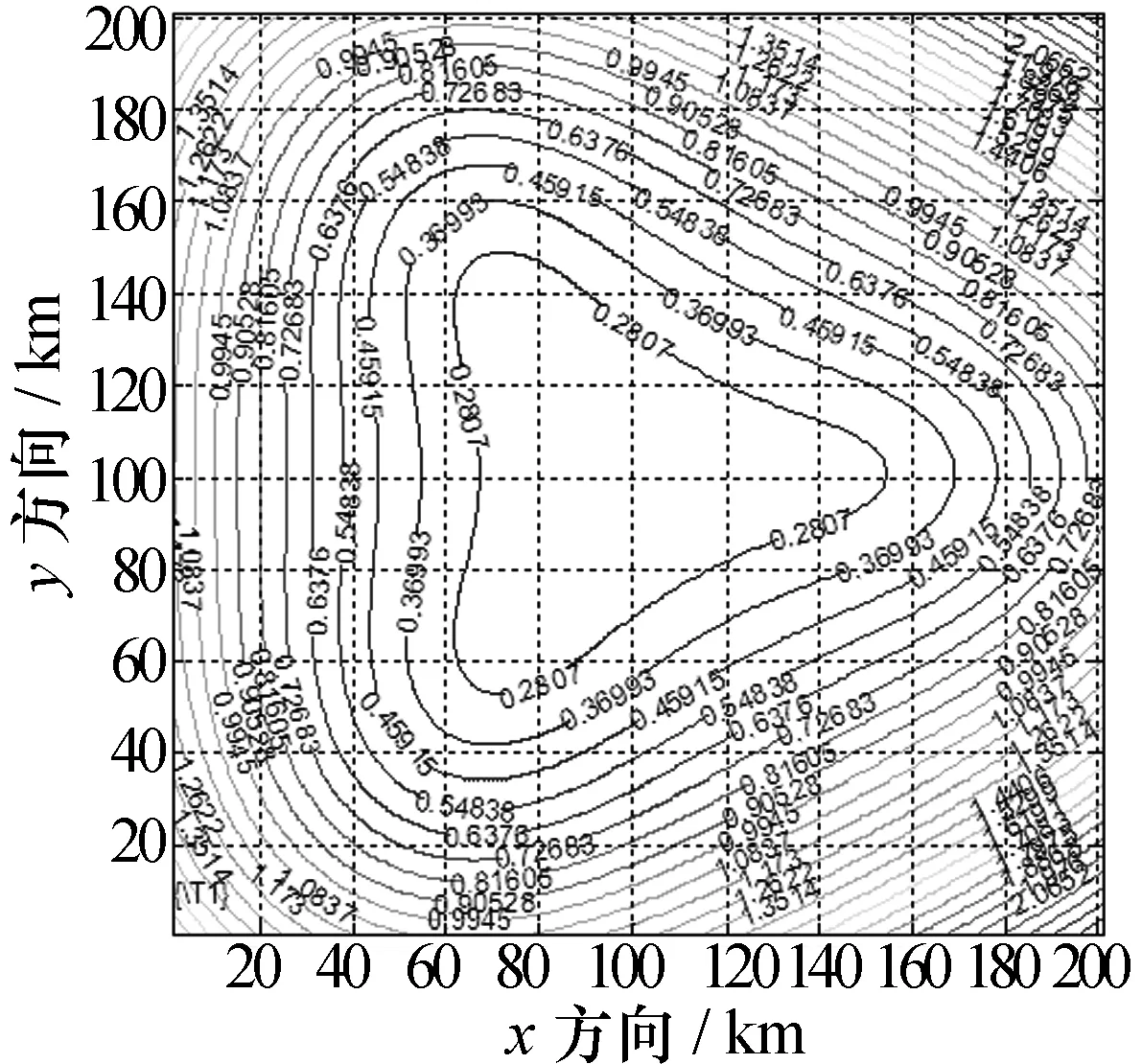
b) σθ=0.7°
c) l=1.5l,σθ=0.5°
对比图10a)、10b)可以发现得到,当定位角的误差分布从原来的0.5°扩展为0.7°时,虽然定位的区域变化不明显,但可以看出其GDOP的值增加了约1.4倍,符合式(10)的表述。对比图10a)和图10c),基站之间的距离变为原来的1.5倍,因为GDOP与l有关,同时也与测向角有关,因此GDOP的变化与l不呈现线性关系,但正相关,与推导结果相符。从图10c)可以看出,其GDOP空间有所下降,GDOP值有所上升,形成的GDOP区间有呈现独立分布的趋势。观察图10a),明显三个系留载平台已经有各自为战的趋势,三者的整体性明显下降,定位效果已经不如前几种设定样式明显。
观察仿真图可以得到,任何两个系留载平台连线的中垂线上,GDOP的等高线最为稀疏,意味着梯度小变化缓慢,与系留载平台相距同等长度内,其GDOP值最低,符合上述关于最佳定位点的分析。
可见,上式的推导具有合理性,选择适当的系留载平台之间的距离与改善平台测向的误差分布,可以提高空基平台组网实现无源定位的定位精度。
4 结束语
本文首先介绍了目前系留载雷达的主要应用,较为全面地总结并提炼了系留载平台自身特有的优势,对比系留载、陆基与空基平台的区别,突出其潜在的军事价值;依托三基地组网,采用盲信号处理方式并行处理实现对于混叠信号的实时准确分离;构建数学模型,研究三基地无源定位的误差效能;结合系留载的特性,提出无源定位的最佳定位点,并进行了仿真分析,验证推导结果。本文结论可用于指导多基地与自适应无源组网的布站,对于以后关于系留载平台的作战使用有重要意义。
[1] 李 洁,汪 洋. 系留气球载平台系统综合载荷配置研究[J]. 现代雷达,2013, 35(9):1-7. LI Jie,WANG Yang. Analysis of structure for tethered aerostat-borne radar system[J]. Modern Radar, 2013,35(9):1-7.
[2] 陈昌胜,赵攀峰. 系留气球载平台系统分析[J]. 雷达科学与技术,2007,5(6): 410-414. CHEN Changsheng, ZHAO Panfeng. Analysis of tethered aerostat borne radar system[J]. Radar Science and Technology,2007,5(6): 410-414.
[3] 虞庆庆,范宁惠. 系留气球载平台系统平台结构总体分析[J]. 现代雷达,2010,32(3): 88-90. YU Qingqing, FAN Ninghui. Analysis of structure for tethered aerostat-borne radar system[J]. Modern Radar, 2010,32(3): 88-90.
[4] 刘晓光,郭福成. 单/多机空空无源定位误差分析[D]. 长沙: 国防科技大学,2010. LIU Xiaoguang, GUO Fucheng. Analysis on the error of single/multiple airborne observer(s) passive localization[D]. Changsha: National University of Defense Technology, 2010.
[5] 潘 峰,王林强,袁 飞. 美国系留气球载预警系统的发展现状及趋势分析[J]. 舰船电子对抗,2010,33(5): 32-35. PAN Feng,WANG Linqiang,YUAN Fei. Analysis on developing status and trend of american tethered balloon-borne early warning system[J]. Shipboard Electronic Count Ermeasure,2010,33(5):32-35.
[6] 侯东兴,刘东红. 浮空器在军事斗争中的应用及发展趋势[J]. 航空兵器,2006,3(6): 60-64. HOU Dongxing, LIU Donghong. The defense application and development trend of aerostat[J]. Aero Weaponry,2006,3(6): 60-64.
范翔宇 男,1991年生,硕士研究生。研究方向为电子对抗理论与技术。
王红卫 男,1974年生,副教授。研究方向为电子对抗理论与技术。
陈 游 男,1983年生,讲师。研究方向为电子对抗理论与技术。
张 毅 男,1983年生,硕士研究生,工程师。研究方向为信号与信息处理。
A Study on Passive Localization Based on Netted Ballon-borne Platform
FAN Xiangyu1,WANG Hongwei1,CHEN You1,ZHANG Yi2
(1. Aeronautics and Astronautics Engineering College, Air Force Engineering University, Xi′an 710038 China)(2. The Unit 94070 of PLA, Xi′an 710016 China)
Balloon-borne platform is capable of far-distance detecting and hovering in the air , which is applicable to the passive localization with the netted of the air-based. Compared the balloon-borne platform with land-based and air-based moving one. Special advantages of the balloon-borne is induced and summarized as a platform to analysis the performance to achieve passive localization. First of all, the typical structure of three balloon-borne platforms system is established, then the threatening signals is sorted from the complicated electromagnetic environment ,which utilized blind signal processing (BSS). In the end, the geometric dilution of precision (GDOP) is discussed based on the mathematic model . According to the conclusion, the optimum anchor point is confirmed by simulation. The achievement can be used to guide to set base station in order to realize the passive localization.
netted balloon-borne platform; BSS; GDOP; optimum anchor point
10.16592/ j.cnki.1004-7859.2016.03.003
范翔宇 Email:panda0077@163.com
2015-10-20
2015-12-23
TN97
A
1004-7859(2016)03-0012-06
猜你喜欢
保健医苑(2021年9期)2021-09-08
电子制作(2019年15期)2019-08-27
电子制作(2019年12期)2019-07-16
小学生学习指导(低年级)(2018年12期)2018-12-29
电气化铁道(2018年4期)2018-09-11
中国设备工程(2018年14期)2018-08-09
北京航空航天大学学报(2017年6期)2017-11-23
金色少年(奇趣科普)(2017年4期)2017-06-05
互联网天地(2016年2期)2016-05-04
火控雷达技术(2016年3期)2016-02-06
