
基于ISAR像的舰船目标识别技术研究
2016-12-20 08:07侯颖妮杨予昊李士国
现代雷达 2016年3期
侯颖妮,杨予昊,李士国,江 涛
(南京电子技术研究所, 南京 210039)
·信号处理·
基于ISAR像的舰船目标识别技术研究
侯颖妮,杨予昊,李士国,江 涛
(南京电子技术研究所, 南京 210039)
针对海面舰船目标自动识别问题,在舰船目标逆合成孔径雷达(ISAR)图像预处理与结构特征提取的基础上,研究了采用ISAR轮廓像与舰船模型轮廓像匹配进行目标识别的方法。该方法首先利用结构特征进行粗分类,缩小模型匹配范围,接着将模型库中的模型投影到距离多普勒平面,利用二者轮廓像的相似程度完成目标识别。雷达实测数据处理说明了该方法的有效性。
舰船ISAR;目标识别;轮廓匹配;特征提取
0 引 言
雷达具有全天候,全天时远距离获取目标信息的能力,在雷达舰船目标识别中常用的有目标窄带雷达截面积(RCS)特征,宽带一维像特征和SARISAR二维像特征[1-3]。其中窄带RCS可以反映舰船目标的大小,但是容易受到RCS起伏的影响和角反射器的欺骗;宽带一维像反映了目标散射结构沿雷达视线的分布情况,但是存在角度敏感,目标类型较多建库困难的问题;舰船ISAR二维像可以反映目标的二维几何形状,并且一些分布比例特征不受视角影响,从ISAR像中提取有效的特征量进行自动目标识别,越来越受到重视。
在利用ISAR像进行目标识别方面,在1996年美国海军实验室Musman S[4]提出了以舰船的长度、舰载设备、桅杆、轮廓等外形信息为主要特征进行分类和识别的方法,为采用ISAR图像进行目标识别奠定了基础。目前基于ISAR像的舰船目标识别技术主要有基于模型匹配的分类识别技术[5-8]和基于数据特征空间的分类识别技术[9]。基于模型匹配的分类识别技术将从ISAR像提取的特征与舰船模型库中的目标特征进行匹配完成自动识别,基于数据特征空间的分类识别技术,利用从建立的目标ISAR像库中进行特征提取、训练、提取有效的特征空间进行自动识别。
考虑到基于数据的舰船目标识别存在对非合作目标建库困难的问题,在基于模型匹配的识别技术基础上,本文利用从舰船ISAR像中提取的特征进行舰船类别粗分类和类型识别的方法,在利用船舶桅杆位置、上层建筑结构、长度特征进行粗分类的基础上,缩小模型匹配的范围,进行成像投影平面估计,将从ISAR像中提取的轮廓像与模型投影到距离多普勒平面像的轮廓像进行匹配,根据相似度完成舰船目标识别,通过舰船实测数据处理验证了文中方法的有效性。
1 投影平面估计
在舰船目标ISAR成像中,由海浪起伏引起的舰船自身运动成为成像的主要运动分量,ISAR对舰船成像的几何关系如图1所示。海面上的舰船除了沿预定路线的正常航行外,由于受到海浪的影响,会有颠簸和摇摆,这包含横摇、纵摇和偏航,因此舰船目标成像具有周期性的特点展。在舰船侧视像以及混合视角像的基础上进行特征提取,并估计投影平面。
设舰船上的散射点位于舰船坐标系[X,Y,Z],舰船上的散射点[xm,ym,zm]在雷达视角坐标系[R,H,V]中为
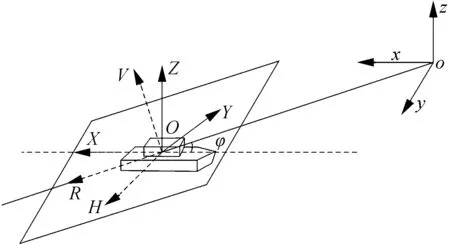
图1 ISAR对舰船成像的几何
(1)
式中:α为擦地角;φ为雷达视线在舰船[X,Y]平面的投影与舰船X轴之间的夹角;ωz和ωy分别为舰船在雷达坐标系下的转动角速度分量,舰船散射点在距离多普勒投影为
(2)
将式(1)带入式(2)有
(3)
其中
为投影矩阵。
设在船体坐标[X,Y,Z]中,船头和船尾两个散射点坐标为(xb,0,z),(xs,0,z),在雷达观测视角下一维距离像在斜距上的投影为Δrb-s=cosαcosφΔxb-s,其中Δxb-s为船长L,则
(4)
式中:擦地角α可以从雷达跟踪数据中得到。
船头船尾的多普勒差为
(5)
舰船桅杆顶部和底部散射点(x,y,za)和(x,y,zf)在(X,Y)平面的投影相同,而桅杆顶部和底部的多普勒差为
(6)
(7)
投影矩阵可写成
(8)
从式(8)可以看出,投影矩阵中的元素可以从ISAR像中获得,其中α为擦地角,可通过跟踪数据获得,φ可通过ISAR像在距离维的投影Δrb-s与模型长度通过式(4)计算得到。Δfb-s为船头船尾的多普勒差,Δfm为桅杆与舰船中心线相接点到顶部的多普勒差。
通过投影矩阵可将目标模型投影到距离多普勒平面,此时ISAR像和模型投影的二维像均在距离多普勒域,二者的轮廓像具有可比性,为采用两者轮廓像匹配进行识别的理论依据。
2 图像预处理
在舰船目标ISAR成像中通常由于杂波和噪声的影响使得ISAR像存在斑点噪声,强散射点副瓣以及旋转部件引起的调制会在多普勒方向产生条纹干扰,目标RCS的起伏使得ISAR像通常表现为稀疏、孤立的散射中心分布,这些固有特点都对图像特征的稳定性和识别性能造成了严重影响。在ISAR图像的特征提取时首先需要对ISAR图像进行预处理,从而能较好地从ISAR图像中提取相关特征。ISAR图像的预处理可分为:去除斑点噪声和条纹干扰、图像的区域连接和填充、几何聚类等。
1) 去除斑点噪声和条纹干扰
对于原始图像中的背景噪声和杂波,首先对图像距离向两侧没有目标的边缘区域进行统计,得到均值μ和标准差σ,采用全局门限对图像进行分割,处理后各像素点的值为
(9)
式中:k为常数,图像中高于等于门限的保持不变,低于门限的像素设置0。
接着采用上述方法再对每一距离单元数据进行处理,去除由聚焦产生的误差以及强散射点副瓣在多普勒域的扩展造成的条纹干扰,其中均值μ和标准差σ由各距离单元相互独立。
最后,采用中值滤波图像进行平滑处理,降低剩余噪声的影响。
2) 形态学区域链接与填充
ISAR像通常存在一些孤立不连续的散射点,在形态学中先膨胀后腐蚀的过程称为闭运算,其作用是填充目标内部的细小空洞,平滑目标的边界以及连接周围邻近目标。对于经过图像分割的图像,可以采用形态学闭操作对图像进行区域连接和填充,采用形态学操作时需要根据目标的分散程度选择结构元素的尺寸。
4) 几何聚类去除非目标区域
经过形态学区域链接与填充后的图像可能由一个连通区域和一些邻近的区域组成,而远离目标的孤立区域可以认为是杂波而丢弃。在几何聚类中先对图像进行连通区域标记,然后根据各区域大小以与位置进行保留或丢弃。
3 特征提取
在ISAR像中提取稳定有效的特征是实现舰船目标识别的基础,舰船目标几何参数特征反映了舰船目标外观,可以用来判断目标的类型,其中几何参数特征包括了舰船中心线、舰船轮廓像、舰船主桅杆位置、舰船上层构造等。
1) 舰船中心线
舰船ISAR图像中的舰船中心线,即连接船头与船尾中心的直线。可以通过Hough变换或者最小二乘拟合进行估计。Hough变换通过最大峰值确定中心线的斜率。但是舰船上较高的结构可能会影响舰船中心线的估计,因此在估计时可以先将多普勒方向具有较大扩展的部分从图像中去除。
2) 舰船轮廓像
舰船中心线将舰船分成上层结构部分和甲板两部分,可以通过比较两部分的多普勒扩展分区分出舰船上层结构部分,其中上层结构部分具有较大的多普勒扩展,舰船的轮廓像为从船头到船尾,舰船上层结构部分的多普勒与舰船中心线多普勒之差。
3) 舰船主桅杆
将轮廓像与门限比较,门限为轮廓像的最大值与平均值的中值,连续几个超过门限的距离单元可以认为是桅杆,桅杆位置取桅杆所在距离单元的中间位置。一般桅杆的位置通过桅杆距离船头的距离与整个船体长度之比表示。
4) 舰船上层结构
在提取的轮廓像基础上,将舰船平均分成3部分,取整个轮廓像的均值为门限,如果每一部分轮廓像的均值大于门限,编码为1,否则编码为0,这样可以获得舰船上层结构的3位2值编码,共8种不同类型。
4 分类识别
在ISAR像图像预处理与特征提取的基础上,首先可根据舰船长度估计结果与桅杆信息估计结果,对舰船进行粗分类,缩小候选目标范围;接着在投影平面估计的基础上,将候选目标三维模型投影到相应的距离多普勒平面并提取其轮廓像;最后将ISAR像的轮廓像与模型的轮廓像进行匹配,根据匹配结果判别目标类型,如图2所示。
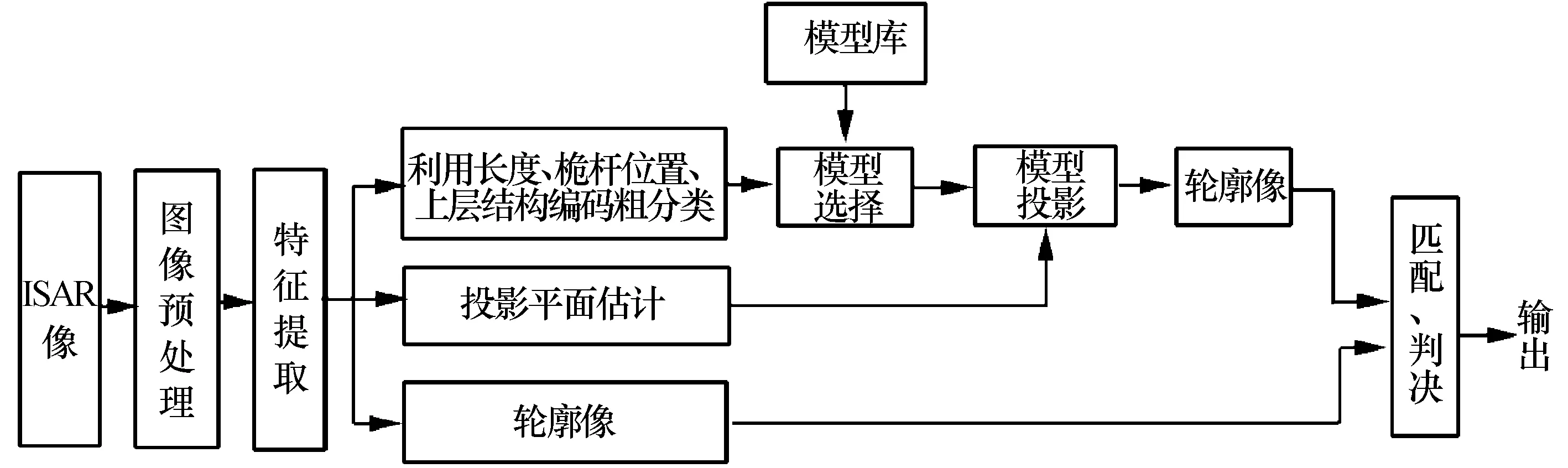
图2 舰船目标分类识别流程图
5 实测数据处理结果
采用由货船、合作船和军舰组成的三种类型目标数据对文中的识别方法进行说明,其中货船和其他两艘船在结构上有明显的特征差异。为了验证对轮廓像匹配识别方法,假设各船在长度上不可分,并对合作船进行了测量与三维建模。
先对各数据进行ISAR成像、图像预处理和特征提取,如图3所示。
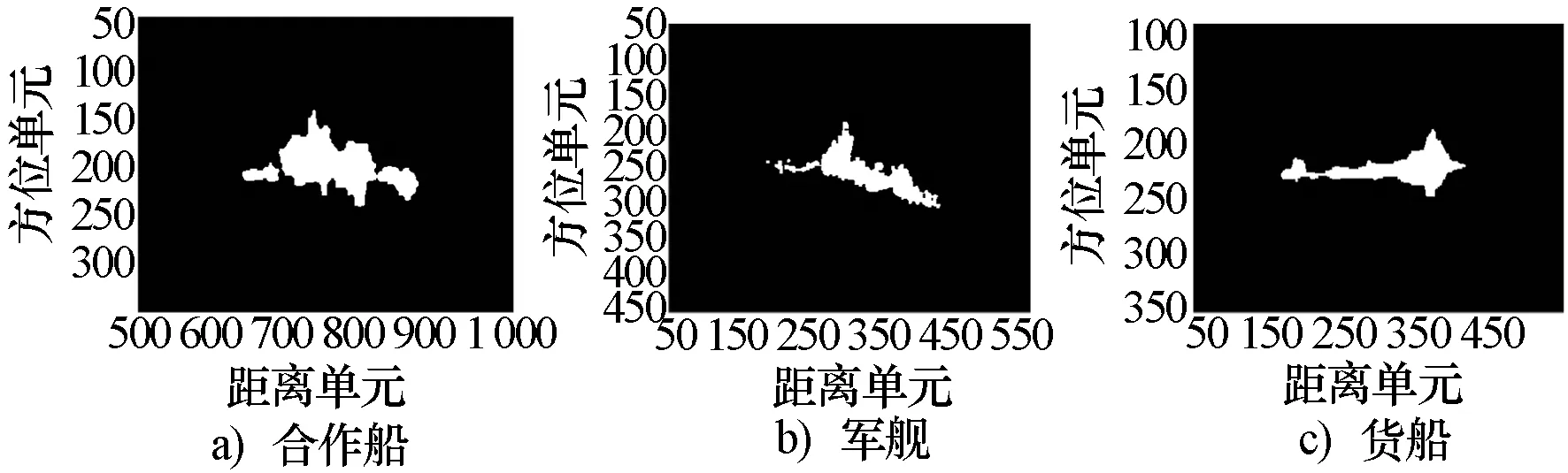
图4 图像预处理结果
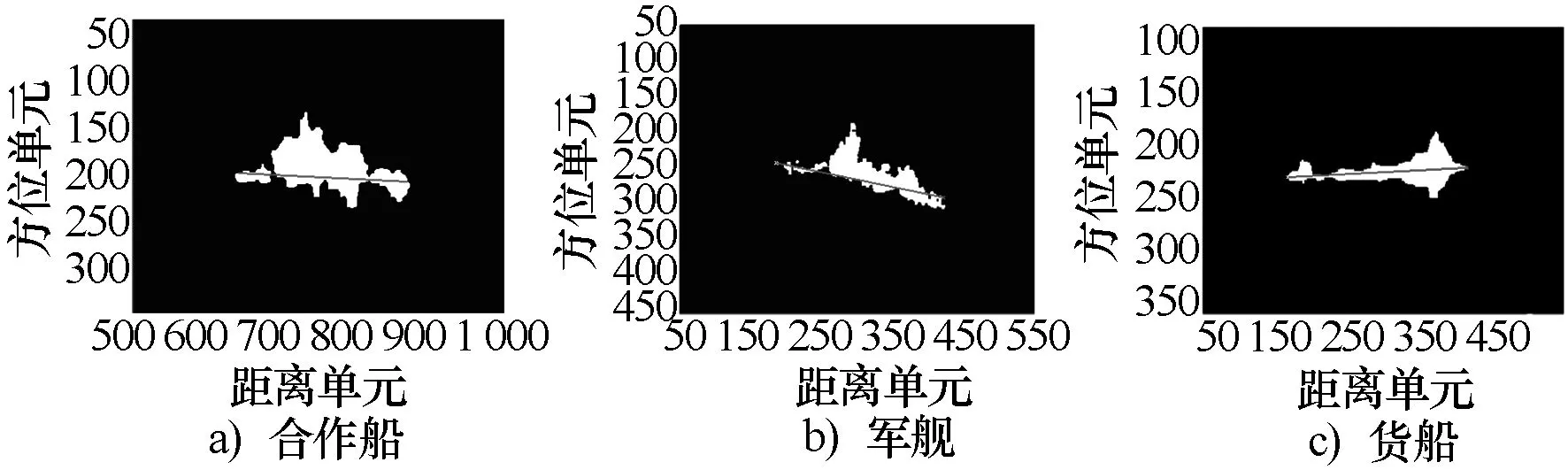
图5 中心线提取结果
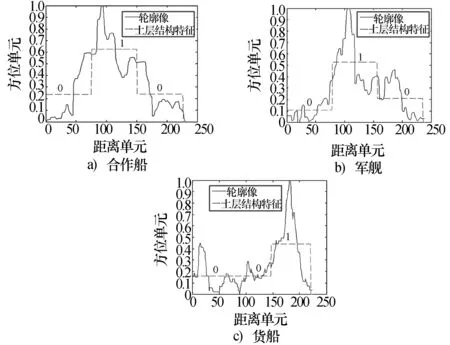
图6 轮廓像与上层结构编码
从三幅轮廓像中提取的桅杆位置以及舰船上层结构编码特征如表1所示,在此桅杆位置泛指船体上最高部分的位置。
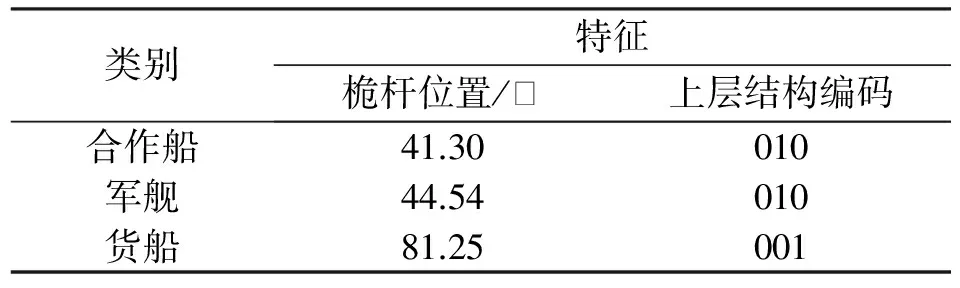
表1 桅杆距离船头位置估计值和上层结构编码特征
根据文中的分类识别流程,在特征提取后,可利用长度、桅杆位置以及上层结构编码对目标进行粗分类。假设三种目标在长度上不可分,由于货船的驾驶舱一般位于船尾,从表1特征提取结果可以看出,根据桅杆位置与上层结构编码可以将货船区分出。
对于不可分的合作船与军舰,通过提取合作船与军舰ISAR图像中的参数构造投影矩阵,利用投影矩阵将目标三维模型投影到相应的距离多普勒平面,并提取距离多普勒平面的模型轮廓像,将模型廓像与ISAR像轮廓像进行匹配,并计算二者的均方根距离,如图7所示。
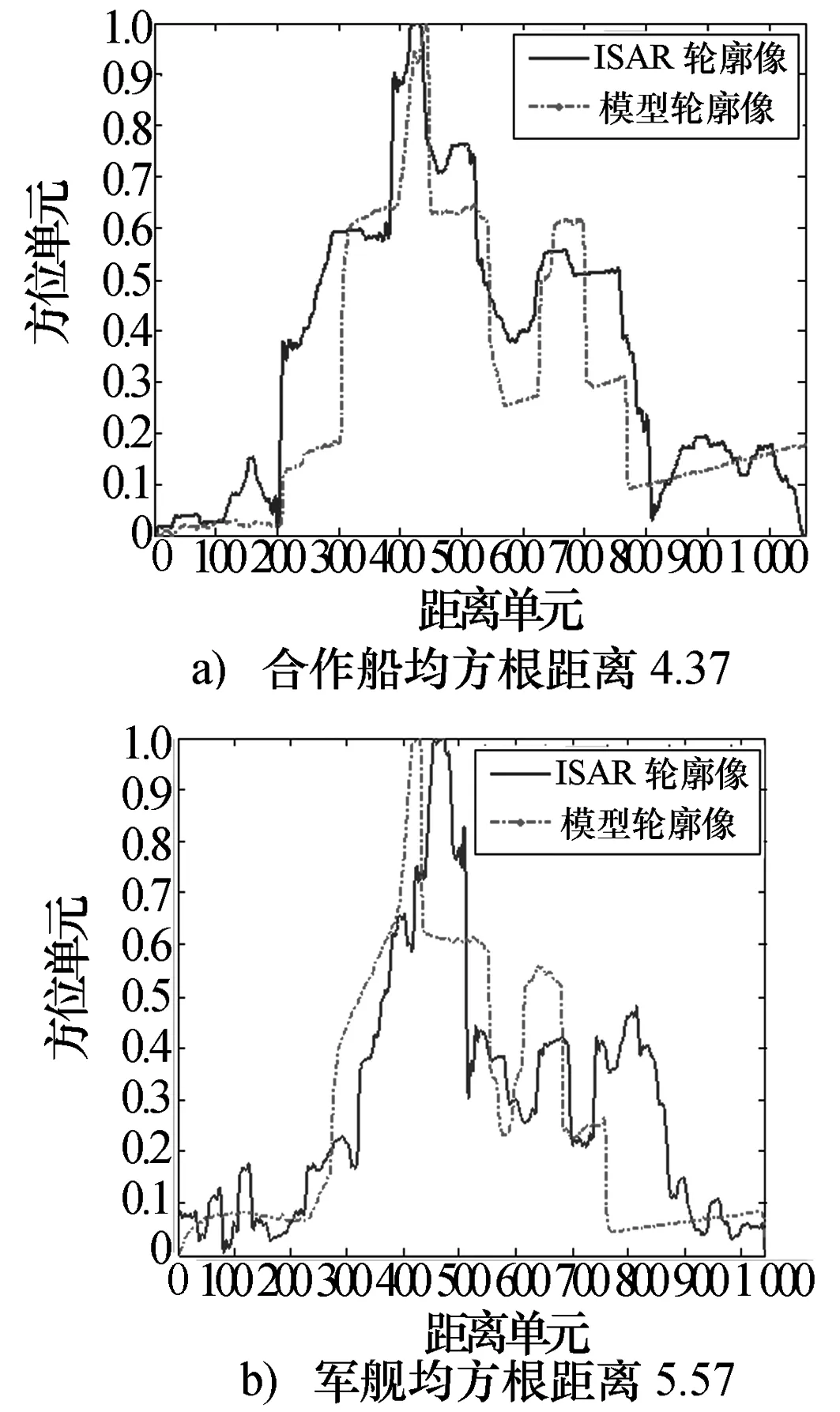
图7 模型廓像与ISAR像轮廓像匹配结果
由图7可以看出,合作船的ISAR轮廓像与模型轮廓像的相似度较高,从而说明了利用模型轮廓像匹配进行舰船目标识别的可行性。不需要建立各种舰船目标的雷达实测ISAR像数据库,避免了非合作目标雷达回波建库困难问题。
6 结束语
针对海面舰船目标识别问题,本文主要研究了基于ISAR像的舰船目标识别方法,在图像预处理和特征提取后,先利用船舶桅杆位置、上层建筑结构、长度特征进行粗分类,缩小模型匹配范围,接着利用ISAR轮廓像与模型轮廓像匹配进一步完成类型识别,实测数据处理结果说明了该方法的可行性。
[1] 王春华,康 猛,郝 明. 基于轮廓像的舰船目标识别方法研究[J]. 现代雷达, 2012, 34(4): 45-52. WANG Chunhua, KANG Meng, HAO Ming. A study on ship target recognition based on outline image[J]. Modern Radar, 2012, 34(4): 45-52.
[2] 陈文婷,邢相薇,计科峰. SAR图像舰船目标识别综述[J]. 现代雷达, 2012, 34(11): 53-58. CHEN Wenting,XING Xiangwei,JI Kefeng. A survey of ship target recognition in SAR images[J]. Modern Radar, 2012, 34(11): 53-58.
[3] 杜琳琳,安成锦,陈曾平. 一种舰船 ISAR 图像中心线特征提取新方法[J]. 电子与信息学报, 2010, 32(5): 1023-1028. DU Linlin, AN Chengjin ,CHEN Zengping. A new algorithm for ship center line extraction in ISAR image[J]. Journal of Electronics & Information Technology, 2010, 32(5): 1023-1028.
[4] MUSMAN S, KERR D, BACHMANN C. Automatic recognition of ISAR ship images[J]. IEEE Transactions on Aerospace and Electronic Systems, 1996, 32(4): 1392-1404.
[5] KNAPSKOG A O. Automatic classification of ships in ISAR images using wire-frame models[C]// Proceedings of EUSAR 2004. Ulm, Germany: [s.n.], 2004: 953-956.
[6] FENG R, COOKE T, GIBBINS D. Model based ISAR ship classification[J]. Digital Signal Processing , 2006, 16(5): 628-637.
[7] PASTINA D, SPINA C. Multi-feature based automatic recognition of ship targets in ISAR[J]. IET Radar Sonar & Navig, 2009, 3(4): 406-423.
[8] PASTINA D, SPINA C. Slope based frame selection and scaling technique for ship ISAR imaging[J]. Signal Processing IET, 2008, 2(3): 265-276.
[9] BON N, HAJDUCH G, KHENCHAF A, et al. Recent developments in detection, imaging and classificcation for airborne maritime surveillance[J]. IET Signal Process, 2008, 2(3): 192-203.
侯颖妮 女,1982年生,博士,高级工程师。研究方向为ISAR目标成像与识别。
A Study on Ship Classification Based on ISAR Images
HOU Yingni,YANG Yuhao,LI Shiguo,JIANG Tao
(Nanjing Research Institute of Electronics Technology, Nanjing 210039, China)
For the radar auto classification of ship, a method based on ISAR silhouette and ship model silhouette matching is studied. First the coarse classification is implemented on the base of ISAR image pre-processing and structure features extraction, in order to reduce the number of candidate models, and then the candidate models are projected to range-Doppler domain. The ship is classified according to the best match of the silhouettes. Last the validly of the method is demonstrated by the real radar data processing.
ISAR ship; targets classification; silhouettes matching; features extraction
10.16592/ j.cnki.1004-7859.2016.03.010
侯颖妮 Email:houyingni@163.com
2015-10-20
2015-12-22
TN911.7
A
1004-7859(2016)03-0047-04
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
阅读时代(2021年6期)2021-09-10
舰船科学技术(2021年12期)2021-03-29
装备制造技术(2020年1期)2020-12-25
东方少年·快乐文学(2020年8期)2020-10-20
制造技术与机床(2019年11期)2019-12-04
舰船科学技术(2016年1期)2016-02-27
石油化工建设(2016年6期)2016-02-27
石油化工建设(2015年6期)2015-12-01
计算机工程(2015年4期)2015-07-05
