
线阵CCD图像的弱小目标检测算法
2016-12-19 01:22李雅婧雷志勇高俊钗
西安工业大学学报 2016年9期
李雅婧,雷志勇,高俊钗
(西安工业大学 电子信息工程学院,西安 710021)
线阵CCD图像的弱小目标检测算法
李雅婧,雷志勇,高俊钗
(西安工业大学 电子信息工程学院,西安 710021)
为解决在复杂室外环境中,受到特殊因素干扰时获取的线阵CCD图像目标检测率低的问题 本文提出了一种基于视觉显著性的线阵CCD图像弱小目标检测算法.该算法根据线阵CCD图像的特点,构建了新的特征向量,设计了与目标形状相似的双窗口进行多特征比较,通过计算中心与周围像素邻域窗口特征向量的相似性来表达各个像素的显著程度,得到图像的显著度图,将显著度图聚类,分割出包含目标的一类,从复杂的背景中提取出弱小目标.经过实验对比分析表明,与传统目标检测法相比,该算法可以更有效检测出线阵CCD图像中的弱小目标.
图像处理;线阵CCD;弱小目标;视觉显著性;聚类
复杂背景下的弱小目标检测是数字图像处理与计算机视觉领域的研究热点之一.在自然环境下,CCD相机的成像质量不但受限于相机的性能、光学系统、目标特性等,而且,他还被摄像时的光线、云层变化、蚊虫、背景等因素所干扰.这些干扰因素有时会导致目标被淹没在复杂的背景中,使图像检测系统失效.特别是当这些目标的像素个数少、形状信息不完善、成像强度弱、背景灰度不均匀、目标灰度极其接近背景灰度时,如何能在这样复杂的背景环境下检测出弱小目标成为一个非常有意义的研究课题.
传统的目标检测方法有最小均方滤波法[1]、中值滤波法[2]、数学形态学方法[3]、边缘检测法等.这些传统方法在目标与背景有较大特征差异时,可以准确地检测出目标,但是当目标与背景的灰度差很小即信噪比较低时,大多则不能准确地检测出目标甚至完全失效.本文针对此难题,将人类视觉系统可以根据目标与背景的细小差异快速发现低信噪比目标的特性运用到复杂背景下的弱小目标检测中去,采用了一种基于视觉显著性[4]的线阵CCD图像弱小目标检测算法.该算法根据线阵CCD图像中目标的特点,采用四个特征构建了新的特征向量,设计了与目标形状相似的双搜索窗口,通过计算中心邻域窗口与周围邻域窗口特征向量的相似性来表达各个像素的显著程度,从而得到图像的显著度图,将显著度图聚类,把包含目标的一类分割出来,实现复杂背景中弱小目标的检测.
1 视觉显著性弱小目标检测算法
视觉显著性表现为场景中元素吸引视觉注意力的能力,而显著性计算模型是对该能力进行建模和量化评估.本文以经典的显著性模型框架[5]为基础,针对线阵CCD图像目标的特点,设计了针对线阵CCD图像的视觉显著性弱小目标检测算法.
1.1 线阵CCD图像特征向量的建立
线阵CCD图像为灰度图像,在图像采集过程中,目标与背景中的晃动树木相互遮挡重合,在图像中表现出了低信噪比的特征,且目标飞行速度快,自身表现出弱小特征,颜色、纹理、形状、边界特征无法加以利用,图像的灰度信息构建了以下四个特征来建立新的特征向量.
1) 邻域最大灰度值
图像中目标与周围像素的灰度值存在差异,取最大灰度值可用来表示区域中中弱小目标的灰度特征.则像素pi的邻域最大灰度值为
(1)
式中:pi=(xi,yi)为其邻域W(xi,yi)内的中心像素,I(xk,yk)为邻域中(xk,yk)处的灰度值大小.
2) 邻域灰度均值
利用邻域最大灰度值表示目标特征往往会收到随机噪声的影响,为了消除噪声干扰,选灰度均值作为第二个特征.邻域灰度均值定义为
(2)
3) 邻域方差

(3)
4) 邻域最大梯度
梯度是图像灰度值显著变化的地方,梯度值越大,则变化越强烈.可用该特征描述当有目标出现时的灰度变化程度,即
(4)
其中Gh(xk,yk)+Gv(xk,yk),
Gh(xk,yk)=|i(xk,yk)-I(xk,yk)+1)|,
Gv(xk,yk)=|I(xk,yk)-I(xk,yk).
1.2 计算线阵CCD图像的显著度图
依据视觉系统中的侧抑制原理[6],即中心元素会受到周围元素的视觉感官影响,图像中的每个像素的显著性可以通过其与周围区域其他像素的相似性来度量.本文通过双窗口来进行多特征比较,从而计算图像中各个像素的显著性大小.由于目标的形状为细长形,经过实验对比确定了外窗口大小为9×9,内窗口的大小为3×7.主要步骤如下:
1) 依次以线阵CCD图像中的每一个像素为中心点,选定一个大小为9×9的窗口,作为点的中心-周围域,再选定一个用来表示其邻域结构的大小为3×7的内窗口.在中心-周围域中,称中心点的邻域窗口为Center矩阵,称周围其他各点的邻域窗口为Surround域矩阵.如下图1所示;
2) 对中心-周围区域中的中心像素pi与周围像素pj,分别利用Center矩阵与Surround域矩阵建立特征向量来描述其邻域结构,即:
(5)
其中L为特征向量的分量个数.
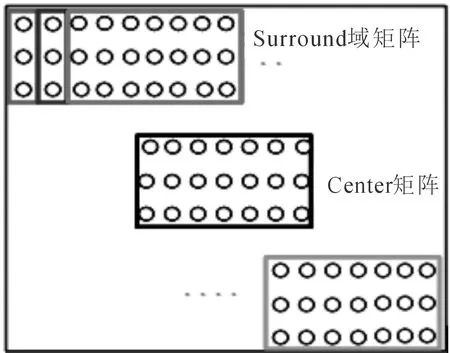
图1 双窗口示意图
结合线阵CCD图像目标的特点,文中采用式(1)~(4)所定义的四个特征来构造新的特征向量.然后通过计算中心像素和周围其他像素邻域矩阵的特征向量的距离来比较其相似程度.Fi和Fj的相似性计算公式为
(6)
其中wl为加权值,p(fil,fjl)为各个特征分量间的相似性,即:
(7)
最后经过归一化得到pi的显著性计算公式为
(8)
图2为一幅线阵CCD复杂背景下单目标的原图和显著度图.图3为线阵CCD复杂背景下多目标图像的原图和显著度图.由图2(b)和图3(b)的显著图可以看出,目标明显高于背景和噪声区域,为分割奠定基础.

图2 线阵CCD单目标显著度图
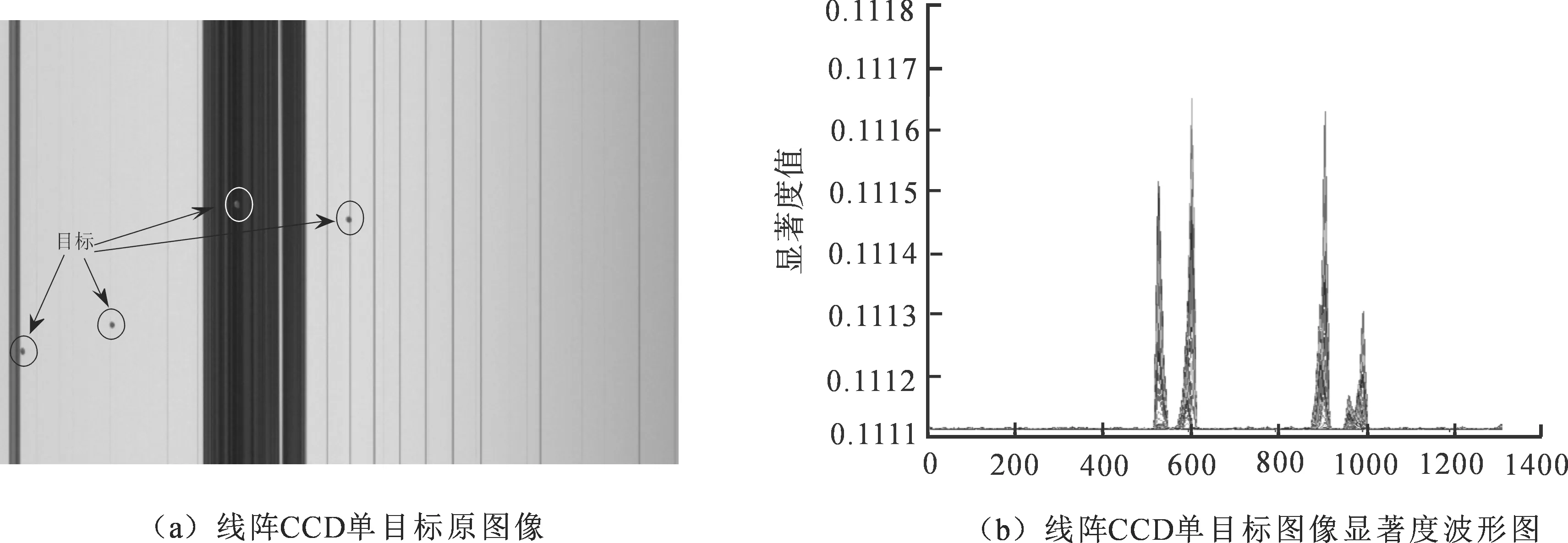
图3 线阵CCD图像多目标显著度图
1.3 显著度图分割
从以上得到的显著图中可以看出,目标凸出明显,因此本文采用聚类分割[7]即可将目标提取出来.经过分析,在对显著图进行聚类分割时,将图像分为目标、背景及待判定区域(包含伪目标)三类即k=3,由图4检测结果图可以看出,对于复杂背景下的弱小目标,可有效地检测.

图4 线阵CCD图像最终检测结果
2 实验结果分析
通过抑制背景信息来增强感兴趣的目标信息,采用分割提取出目标,属于图像增强的范畴.本文算法与传统的图像增强算法Sobel算子检测法[8],Canny算子检测法[9]进行比较.
Sobel算子采用纵横两个3*3模板作为核与图像中每个像素点做卷积和运算,提取合适的阈值来提取边缘.Canny边缘检测算法先用高斯平滑滤波器进行卷积降噪,接着计算梯度幅值和方向,进行非极大值抑制和滞后阈值来获取感兴趣目标的边缘.图5和图6为三种方法的目标检测结果.
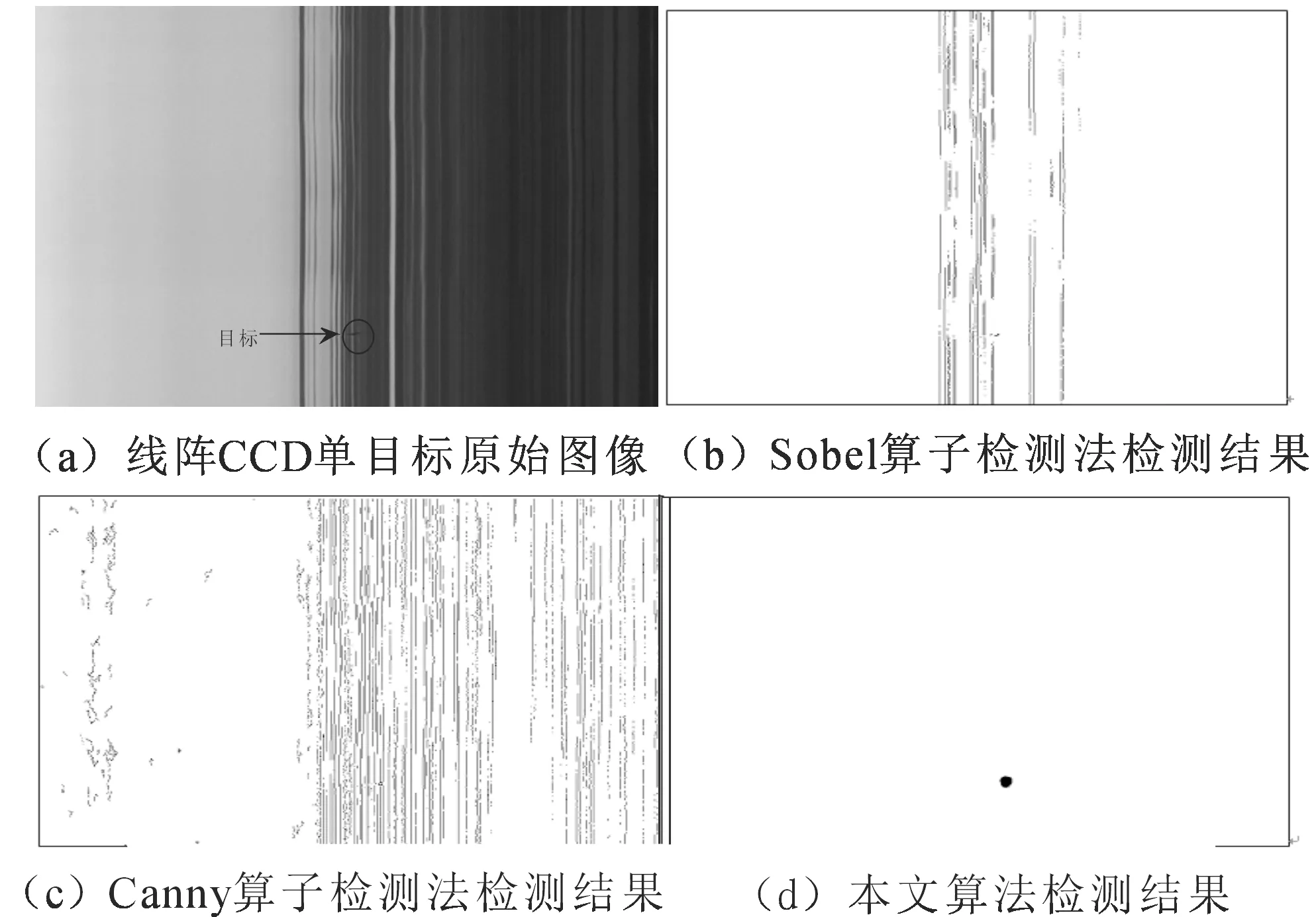
图5 单目标图像本文算法与Sobel算子检测法,Canny算子检测法比较结果
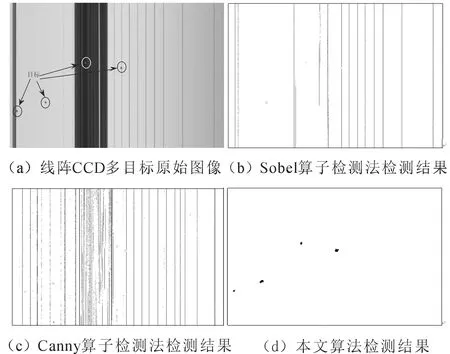
图6 多目标图像本文算法与Sobel算子检测法,Canny算子检测法比较结果
图5(a)为线阵CCD复杂背景单目标的原始图像,图6(a)为线阵CCD复杂背景四目标的原始图像,其中目标被淹没在背景中很难观测到.图5(b)、图6(b)和图5(c)、图6(c)分别为用Sobel算子检测法检测的结果和用Canny检测法检测的结果,结果中依然包含大量的背景信息,无法分离出弱小目标.图5(d)、图6(d)是用本文算法检测的结果,图中复杂背景被去除,单目标和四目标均被提取出来了,通过不同检测方法的对比验证了本文算法的有效性.
3 结 论
将基于视觉显著性的显著度图计算模型用于线阵CCD图像弱小目标检测中,经过于传统目标检测方法的对比分析,验证了本文算法的有效性,可以最大化的抑制线阵CCD图像中的复杂背景与干扰噪声,准确地检测出弱小目标,但仍需在下一步的工作中进一步提高算法的实时性.
[1] 汪成曦,刘以安,张强.改进的最小均方自适应滤波算法[J].计算机应用,2012,32(7):2078.
WANG Chengxi,LIU Yian,ZHANG Qiang.An Improved Least Mean Square Adaptive Filter algorithm[J].Journal of Computer Applications,2012,32(7):2078.(in Chinese)
[2] 黄宝贵,卢振泰,马春梅,等.改进的自适应中值滤波算法[J].计算机应用,2011,31(7):1835.
HUANG Baogui,LU Zhentai,MA Chunmei,et al.An Improved Adaptive Median Filtering Algorithm[J].Journal of Computer Applications,2011,31(7):1835.(in Chinese)
[3] 王小兵,孙久运,汤海燕.一种基于数学形态学与小波域增强的滤波算法[J].微电子学与计算机,2012,29(7):64.
WANGXiaobing,SUN Jiuyun,TANG Haiyan.A New Filter Algorithm Based on Mathematical Morphology and Wavelet Domain Enhancement[J].Microelectronics & Computer,2012,29(7):64.(in Chinese)
[4] LTTI L,KOCH C.Computational Modelling of Visual Attention.[J].Nature Reviews Neuroscience,2001,2(3):194.
[5] FAUGERAS O D.Digital Color image Processing Within the Framework of a Human Visual Model[J].IEEE Transactions on Acoustics Speech & Signal Processing,1979,27(4):380.
[7] 李翠,冯冬青.基于改进K-均值聚类的图像分割算法研究[J].郑州大学学报(理学版),2011,43(1):109.
LI Cui,FENG Dongqing.Research on K-means Clustering Algorithm for Images[J].Journal of Zhengzhou University(Natural Science Edition),2011,43(1):109.(in Chinese)
[8] 熊秋菊,杨慕升.数字图像处理中边缘检测算法的对比研究[J].机械工程与自动化,2009(2):43.
XIONG Qiuju,YANG Musheng.Contrasting Research on Algorithm for Edge Detection in Digital Image Processing[J].Mechanical Engineering & Automation,2009(2):43.(in Chinese)
[9] 吕哲,王福利,常玉清.一种改进的Canny边缘检测算法[J].东北大学学报(自然科学版),2007,28(12):1681.
LYU Zhe,WANG Fuli,CHANG Y uqing,An Improved Canny Algorithm for Edge Detection[J].Journal of Northeastern University(Natural Science),2007,28(12):1681.(in Chinese)
(责任编辑、校对 张立新)
Dim Target Detection Algorithm Based on Linear CCD Image
LIYajing,LEIZhiyong,GAOJunchai
(School of Electronic Information Engineering,Xi’an Technological University Xi’an 710021,China)
A new target detection algorithm based on visual saliency was proposed to solve the problem of the low detection rate of linear array CCD image in a complex outdoor environment, which is subject to special interference.According to the characteristic of the linear array CCD image, a new feature vector was constructed, and a double window similar to the characteristics of the target image was designed to compare the features. The salience degree of each pixel was expressed by calculating the similarity of feature vectors between the center and the surrounding neighborhood windows, and then the image saliency map was obtained.Finally, the saliency map was clustered into several classes with the class that contained the targets obtained, from which the dim targets were extracted. The experiment shows that compared with the traditional target detection method, the proposed algorithm can suppress the noise and complex background, and more effectively detect the dim targets in the linear array CCD image.
image processing;linear array CCD;dim target;visual saliency;clustering
10.16185/j.jxatu.edu.cn.2016.09.011
2016-05-17
李雅婧(1989-),女,西安工业大学研究生.
雷志勇(1962-),男,西安工业大学教授,主要方向为动态测试、图像处理.E-mail:leizy888@163.com.
TP391.41
A
1673-9965(2016)09-0744-05
猜你喜欢
农业工程学报(2022年7期)2022-07-09
北京航空航天大学学报(2022年6期)2022-07-02
天津医科大学学报(2021年1期)2021-01-26
雪豆月读·高年级(2020年2期)2020-09-10
吉林大学学报(理学版)(2020年3期)2020-05-29
飞天(2018年8期)2018-10-29
自动化学报(2018年7期)2018-08-20
自动化学报(2017年5期)2017-05-14
周口师范学院学报(2016年5期)2016-10-17
红领巾·萌芽(2015年1期)2015-04-10
