
多部无源被动传感器交叉定位优化配置研究
2016-12-19 00:48:18王国宏于洪波
弹箭与制导学报 2016年4期
盛 丹,王国宏,于洪波
(海军航空工程学院信息融合研究所,山东烟台 264001)
多部无源被动传感器交叉定位优化配置研究
盛 丹,王国宏,于洪波
(海军航空工程学院信息融合研究所,山东烟台 264001)
研究了多部被动传感器交叉定位优化配置问题。在两部传感器与目标处于最优交会角时引入第三部传感器,通过数据压缩进行融合定位,并通过不敏变换消除非线性变换引入的误差。在定位模糊椭圆准则下给出了融合定位效果优于两部传感器交叉定位效果时第三部传感器的布局特点。得出的相关结论对多个被动传感器的优化配置及提高目标定位精度具有一定的实际意义。
无源交叉定位;多传感器;优化配置
0 引言
无源探测系统[1-3]具有全方位、快速、探测距离较远、受干扰情况下仍能正常工作等优点,因此具有重要的研究价值和应用价值。
相对于无源交叉定位中的去除虚假点[4-5]、定位滤波算法[6-8]等问题,目前对怎样优化布局配置多个无源传感器的研究较少。针对这个问题,最早是在假设目标到雷达基线的距离为常数的条件下进行研究的[9],得出了一些有用的结论。但是实际的应用是较为复杂的,首先由于目标的运动,目标到传感器基线的距离是不固定的,其次,传感器的角度测量误差不同影响着定位结果。文献[10]把目标到基线的距离作为参变量,得到模糊区面积最小及相应结论。文献[11]则针对最优交会角问题,给出了最优交会角的位置、大小及相应的约束条件,文献[12]在二维空间讨论了仰角及其测量精度对最优交会角的影响,对实际应用具有很好的指导意义。但是上述的最优效果都是基于两部传感器得出的,引入第三部或者更多部传感器能否进一步提高定位效果还未见相应的结论。
文中针对3部无源被动传感器组成的测向交叉定位系统,通过最优数据压缩将传感器两两定位的结果相融合,为了提高定位精度,采用不敏变换来消除非线性误差。讨论了两部传感器与目标处于最优配置的情况下,引入第三部传感器对定位效果的影响。并进一步讨论了不同量测误差下第三部被动传感器的优化配置。
1 问题描述
采用无源被动传感器对目标进行定位和跟踪,在测角误差固定的前提下,可以通过优化传感器的布局来最小化定位误差,以3部传感器为例进行说明。假设3部被动传感器同步工作,在笛卡尔坐标系中分别位于(0,0),(D,0)和(X3,Y3),目标坐标为(x,y),位置关系如图1所示。

两部传感器交叉定位时,在定位模糊椭圆准则下,当目标到两部传感器基线的距离与基线长度的比值l满足l≥0.5时,目标与两部传感器成等腰三角形时得到最优交会角;当l<0.5时,目标位于以两部传感器基线为直径的圆上时得到最优交会角。3部传感器目标定位时,可以采用数据压缩融合[13]定位获得目标位置估计。
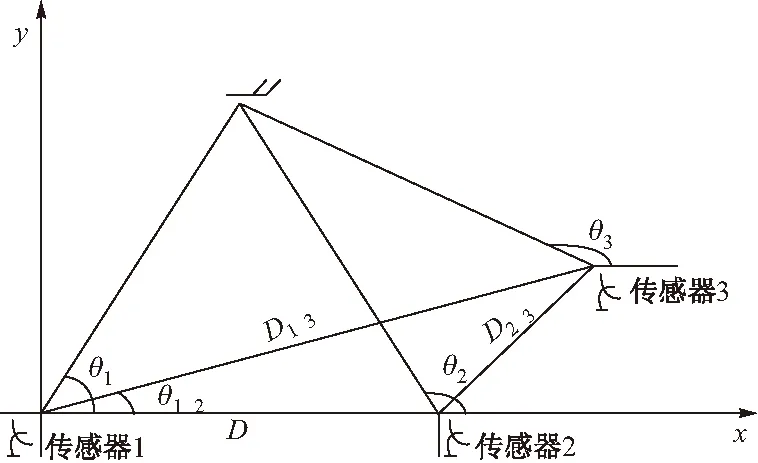
图1 无源交叉定位
2 不敏变换的三传感器目标定位算法
由于存在测角误差,3部传感器实际定位如图2所示。
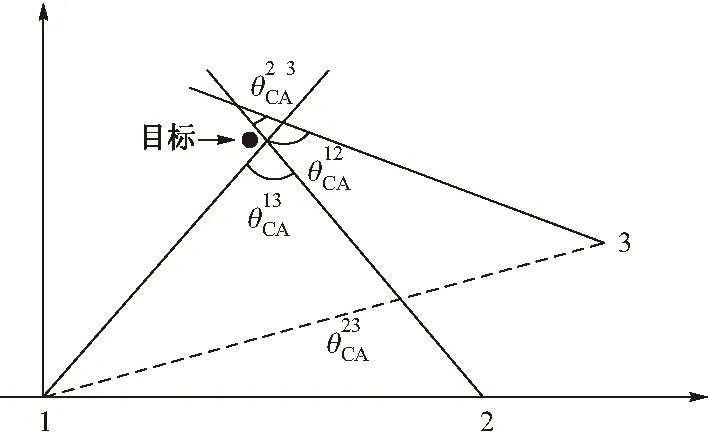
图2 实际交叉定位关系图

(1)
(2)
根据不敏变换原理[14],将两部传感器的量测构造随机变量xij=[θi,θj]T,对二维变量xij选取5个sigma点αn,n=0,1,…,4,相应的权重为ωn,n=0,1,…,4。sigma点αn经非线性变换g后,得到zij的sigma采样点βn,n=0,1,…,4,此变换过程中,相应的权重保持不变,通过加权得到传感器i、j对目标的位置估计和相应的协方差矩阵为:
(3)
(4)
(5)
其中Qij为融合权重,
(6)

(7)
(8)
融合后仍采用定位模糊椭圆准则来进行位置估计误差的衡量。
(9)

3 多部传感器优化配置
由于融合过程把3部传感器的量测信息都重复利用了两次,造成信息冗余,因此,选择传感器1、3和1、2的定位结果进行融合。设定D=30 km,σθ1=σθ2=σθ3=0.3°。
3.1 目标与传感器1、2呈直角三角形布局
不同的直角三角形下,融合定位效果不同,因此在不同的情况下进行分析比较,分别取θ1=15°,30°,45°,60°,θ3=[-0.4π:0.1π:0.5π],则传感器3处在不同位置时的定位误差如图3所示。
从图3可以看出:
1)传感器1、传感器2处于最优交会角为直角的布局下,引入第三部传感器,通过融合定位能够提高目标定位精度。
2)在传感器1、传感器2的不同布局下,传感器3的布局范围不同,最优布局的位置不同。在固定的θ1取值下,传感器3存在最优布局;当θ1取值不同时,传感器3的最优布局不同,从上组图中的误差大小可以看出,特定θ1取值下,传感器3具有全局最优布局。
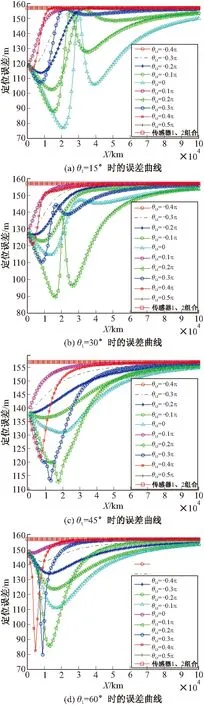
图3 θ13不同取值下传感器1、2定位及融合定位误差
由于融合定位对定位效果的提高程度不同,当效果提高不明显时不必要引入第3部传感器,设定融合定位能够提高定位效果30%时引入传感器3,此时传感器3布局的GDOP图见图4。

图4 定位效果提高30%时传感器3布局的GDOP图(σθ1=σθ2=σθ3=0.3°)
从图4可以看出:
1)θ1不同取值下,传感器3都具有固定的布局范围,这与基线的长度及量测误差的取值是无关的。
2)传感器3越靠近目标,定位效果越好,这与图3的结论是一致的。
3)当θ1<45°时,传感器3的布局是关于目标与传感器2连线对称的。当θ1>45°时,传感器3的布局是关于目标与传感器1连线对称的。并且θ1越靠近45°,传感器3的布局越近似于以目标为圆心的同心圆。
3.2 目标与传感器1、传感器2呈等腰三角形布局
传感器1、传感器2与目标呈等腰三角形时θ1≥45°,取θ3=[-0.4π:0.1π:0.5π],θ1=45°,55°,65°,75°,传感器3的布局范围采用GDOP图给出(见图5)。
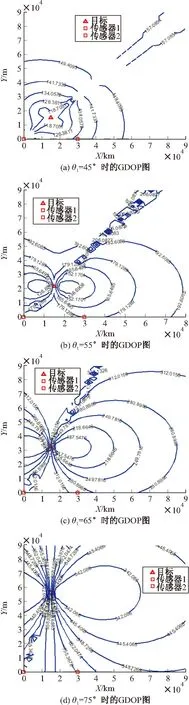
图5 定位效果提高30%时传感器3布局的GDOP图(σθ1=σθ2=σθ3=0.3°)
从图5可以看出,传感器3的布局是关于传感器1、2基线的中线对称的,并且,目标距传感器1、2基线距离越远,传感器3的布局范围越大。
4 仿真试验
假设雷达1位置(0 km,0 km),目标位置(45 km,31.8 km),雷达2位置(90 km,0 km),目标处在雷达1、3的最优交会角上。3部雷达的测角精度为0.3°,经1 000次蒙特卡罗仿真。
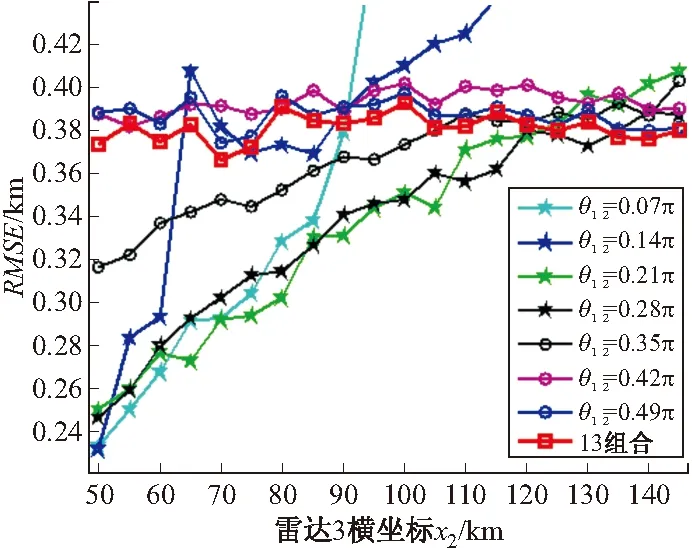
图6 定位误差曲线
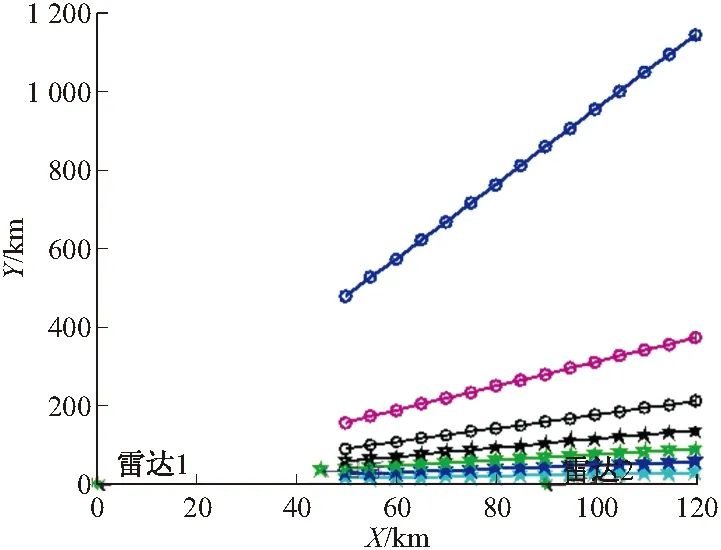
图7 传感器3不同位置图
从图6、图7可以看出:
1)参与融合的传感器并不是越多越好,当传感器3的横坐标超过一定值时,θ3的各个取值对应的融合定位误差都较雷达1、2的定位误差高。
2)横向比较:θ3一定,传感器3横坐标增大,也即θ3增大,融合定位误差增大,因此传感器3的最优布局在雷达1、2基线的中线上。
3)纵向比较:传感器3横坐标一定时,θ3∈(0.14π,0.42π),融合定位误差随θ3的增大而增大;θ3∈(0,0.14π),融合定位误差随θ3的增大而减小。
可见,仿真结果与前面的理论分析结果是相吻合的。
5 结论
针对多部无源传感器交叉定位,研究了两部传感器与目标处于最优交会角时,引入第3部传感器能否提高定位效果的问题。通过数据压缩将两两传感器定位结果进行加权融合,并采用不敏变换消除此过程中的非线性误差,通过计算给出了第3部传感器的最优布局及融合定位优于传感器1、传感器2定位时的布局范围。得到相关的结论对无源传感器的优化配置具有一定的理论和实际意义。
[1] MIN Jiang, NIU Ruixin, BLUM R S. Bayesian target location and velocity estimation for multiple-input multiple-output radar [J]. IET Radar, Sonar and Navigation, 2011, 5(6): 666-670.
[2] 赵国庆. 雷达对抗原理 [M]. 西安: 西安电子科技大学出版社, 1999: 213-220.
[3] 修建娟, 何友, 王国宏, 等. 测向交叉定位系统中的交会角研究 [J]. 宇航学报, 2005, 26(3): 282-286.
[4] 董志峰, 汪增福, 刘庆文. 去除交叉定位中虚假定位的一种快速算法 [J]. 系统仿真学报, 2002, 14(4): 527-530.
[5] 陈鲲, 陈云秋, 陈世友. 无先验信息排除无源交叉定位虚假交点的新方法 [J]. 火力与指挥控制, 2009, 34(11): 130-133.
[6] 刘兰石, 司锡才. 三角交叉无源定位位置偏差估计滤波算法研究 [J]. 系统工程与电子技术, 2000, 22(12): 24-26.
[7] 曾昭勇, 陈红, 蔡晓霞. 基于粒子滤波的多站交叉定位 [J]. 舰船电子对抗, 2008, 31(2): 12-14.
[8] 贺静波, 黄高明, 彭复员. 一种改进粒子滤波的双站无源定位跟踪算法 [J]. 电子信息对抗技术, 2007, 22(6): 19-22.
[9] 王成, 李少, 王鑫全. 长基线测向交叉被动定位算法坐标变换误差的研究 [J]. 系统工程与电子技术, 2002, 24(2): 18-21.
[10] 王宏飞, 杨成梧. 双被动雷达交会跟踪的精度分析与跟踪算法 [J]. 电子学报, 2003, 31(3): 471-474.
[11] 白晶, 王国宏, 王娜, 等. 测向交叉定位系统中的最优交会角研究 [J]. 航空学报, 2009, 30(2): 298-304.
[12] 王国宏, 苏伟, 白晶, 等. 不同量测误差情况下1D和2D被动传感器交叉定位系统最优交会角研究 [J]. 电子学报, 2009, 37(6): 1295-1299.
[13] 张晶炜, 熊伟, 何友. 基于数据压缩的集中式多传感器多假设算法 [J]. 北京航空航天大学学报, 2007, 33(12): 1448-1451.
[14] 何友, 修建娟, 张晶炜, 等. 雷达数据处理及应用 [M]. 北京: 电子工业出版社, 2006: 46-48.
Study on Passive Location System Optimal Arrangement
SHENG Dan,WANG Guohong,YU Hongbo
(Research Institute of Information Fusion, Naval Aeronautical and Astronautical University, Shandong Yantai 264001, China)
Passive location system optimal arrangement of multi-sensor was studied. The third sensor was used when the other two have optimal cut angle. The location results of them were fused with data compression, and unscented transformation was taken to eliminate the nonlinear errors. In the sense of concentration ellipse, arrangement of the third sensor was given when the fusion location effect was better than that of the senor 1 and sensor 2. The conclusion is helpful for overall arrangement of multi-sensor and improving its location precision.
passive triangulation; multi-sensor; overall arrangement
2015-08-00
盛丹(1983-),女,山东烟台人,博士。研究方向:无源定位。
TN958.93
A
猜你喜欢
纺织科学研究(2023年9期)2023-10-23 11:18:06
高技术通讯(2021年3期)2021-06-09 06:57:46
科学(2020年5期)2020-11-26 08:19:14
电子制作(2019年12期)2019-07-16 08:45:14
当代水产(2019年1期)2019-05-16 02:41:10
北京航空航天大学学报(2017年6期)2017-11-23 05:57:06
舰船电子对抗(2016年5期)2016-12-13 08:41:14
太空探索(2016年9期)2016-07-12 09:59:53
互联网天地(2016年2期)2016-05-04 04:03:23
电测与仪表(2015年13期)2015-04-09 11:57:34
