迭代总体最小二乘正则化的近场声全息方法研究
2016-12-15 10:41曹跃云杨自春
振动与冲击 2016年21期
张 磊, 曹跃云, 杨自春
(海军工程大学 动力工程学院,武汉 430033)
迭代总体最小二乘正则化的近场声全息方法研究
张 磊, 曹跃云, 杨自春
(海军工程大学 动力工程学院,武汉 430033)
为有效解决近场声全息(Near-field Acoustic Holograph,NAH)技术在水下振动声源识别方法中面临不适定性问题,将平面NAH技术的声源识别过程转化为线性系统的求解过程,探明声源识别中不适定性问题产生的根源,考虑全息面测量声压和传递矩阵均存在误差,提出牛顿迭代的总体最小二乘(NTLS)正则化方法稳定NAH重建过程。新方法以TLS正则化算法为基础建立目标函数,将目标函数改化为具有凸函数的性质;然后采用具有二阶收敛速度牛顿迭代法求解;基于L曲线法特性,提出自适应迭代方法确定正则化参数。开展了NAH仿真和试验研究,提出构建良态传递矩阵的策略,最终验证了NTLS正则化的NAH技术在水下振动声源识别和定位中具有较好的精度。
近场声全息;总体最小二乘;正则化方法;声源识别
当前,通过控制舰船水下的噪声水平来推进舰船的安静化进程是增强海军舰船生命力和战斗力的重要途径,也已成为各海军强国水下技术竞争的焦点[1]。而水下噪声源识别是噪声控制的首要也是最重要的工作之一。近场声全息 (Near-field Acoustic Holography,NAH)技术能全面利用声场信息,具有抗干扰性好、可视化效果好等优点,已成为一种非常有效的水下声源识别方法[2]。NAH技术的声源识别过程是典型的声学反问题,该反问题常具有不适定的特点,主要表现为全息面微小的测量误差都会引起较大的声源识别误差,甚至完全失真,此问题在水下复杂的噪声环境中显得尤为突出。该不适定性问题是准确实现声源识别的难点所在,也已成为学者们迫切关注的问题。
WILLIAMS等[3]为消除NAH方法中的不适定性问题对声场重建结果的影响,比较了正则化方法如Tikhonov法,Landweber迭代法,共轭梯度法,并探讨了正则化参数确定方法(如GCV法、Morozov误差法等)对正则化结果的影响。DLILLO等[4]在NAH技术实现过程中采用改进共轭梯度法实现了正则化处理。毕传兴等[5]以分布源边界点的NAH理论为基础,改进Landweber迭代正则化方法稳定NAH声场重建过程。JESPER[6]引入了一种新的NCP正则化参数确定方法,通过实验验证优于L曲线法和GCV法。李凌志等[7]采用等效噪声方差方法确定正则化参数,但该方法需要事先得知噪声水平等先验知识,限制了其应用。贺春东等[8]通过在全息面与源面之间布置一个小型辅助面,改进共轭梯度正则化方法来稳定NAH的重建过程,并验证新算法在计算精度和效率上均优于Landweber迭代的NAH方法。
为了解决NAH技术在声源识别中涉及的不适定问题,目前主要采用最小二乘(Least Squares,LS)的正则化方法。但因构建声振传递矩阵过程也会存在截断、数值处理等误差,这时,总体最小二乘 (Total Least Squares,TLS)正则化方法是一个最佳选择。为此,笔者将剖析NAH技术在声源识别过程中产生不适定性的根本原因,对TLS正则化方法进行深入研究,提出融合三种新策略的牛顿(Newton)迭代TLS正则化的NAH技术,克服声源识别过程中存在的不足。最后,经仿真算例和试验,验证了NTLS正则化的NAH技术在水下声源识别和定位时的有效性和鲁棒性。
1 NAH技术及其离散化过程
由NAH理论,位于平面zH上的空间点(x,y,z)的复声压可由格林公式求解得到
p(x,y,zH)=
∬Sp(x′,y′,zs)g(x-x′,y-y′,z-zs)dx′dy′
(1)

对方程(1)两边进行二维空间FFT变换后,源面振速V和全息面声压P在波数域内满足
P(kx,ky,zH)=GN(kx,ky,d)V(kx,ky,zS)ρ0c0k
(2)
式中:d=zH-zS,变换域的坐标对应关系为(x,y)⟺(kx,ky),且
GN(kx,ky,d)=eikzd/kz
(3)
(4)
由式(2)可得到如下关系
(5)
FpH=GFvS
(6)

pH=F-1GFvS=HvS
(7)
2 NTLS正则化方法
TLS问题的准则为[7]
(8)
式中:设b=pH,x=vS,满足b0=H0x,H,p为包含噪声时的量,当H0=H时,不考虑系数矩阵的误差,此时TLS准则等效于LS准则。将式(8)进行Tikhonov正则化,得到以下的目标函数
(9)
式中:L为正则化矩阵,E为系数矩阵的误差,r为观测向量的误差,λ为正则化参数。构造拉格朗日目标函数
(10)

(11)
可见,式(11)为无约束的最优化问题,但该函数的凹凸性未知。求解该过程面临的主要问题为代价函数(11)一般为非凸函数,易产生不收敛的序列,不易获得全局收敛解,且不可避免增加运算的复杂度,从而降低了计算效率[9-10]。因此非常有必要对式(11)进行相应的改化,提高算法的有效性。采用迭代算法时,考虑到迭代过程中,每一步迭代所部分恢复的结果可作为下一步运算的先验知识,在不失一般性的前提下,将代价函数(11)分母中的量x取为前一步的迭代结果即xk-1,得到以下方程
(12)
易见,改化策略保证了目标函数迭代的连续性,尤为值得注意的是,改化后的代价函数从非凸函数变为了凸函数,该特性将明显提高方程(12)的求解效率。
综上,为高效、稳定的解决Tikhonov正则化的TLS问题(11),本节提出三个新策略:首先,将代价函数(11)改化为具有凸函数性质的代价函数(12);其次,在式(12)的基础上采用自适应迭代方法确定正则化参数;最后,采用具有二阶收敛速度牛顿(Newton)迭代法求解式(12),因改化后目标函数的二阶导数为正定,保证所产生的方向是目标函数在xk处的下降方向。此处称该算法为NTLS算法,其计算流程如下:
(1) 设定外部循环的容许误差ε,0<ε≪1,外部循环的最大迭代次数kmax
(2) 设定内部循环的容许误差ξ,0<ξ≪1,内部循环的最大迭代次数lmax
(3) 假设迭代初始向量xk-1=x)k∈n×1,初始迭代正则化参数λk,k=1
(4) 开始外部循环
(4.1) 内部循环进程
(c) 否则计算Gl=2f(xl),计算搜索方向Gldl=-gl

(4.4) 令k:=k+1
(4.5) 若收敛条件η<ε或k>kmax,执行步骤 5
(5) 结束外部循环
为进一步提高算法的收敛性能,在第k步外部循环时,选取xk-1作为NTLS方法的迭代的初始值。
3 数值仿真
为验证NTLS正则化的NAH技术的有效性,以0.3 m×0.3 m简支板声源为例(位于xoy坐标平面,x∈[-0.15,0.15],y∈[-0.15,0.15]),板厚度为0.006 m,该简支板完全浸入水中。施加外部激励力,作用于板的中心,激励力F=160 N,激励频率范围为500~1 000 Hz。为从源头上减少NAH实现过程的误差,可通过控制参数选取来构建较为良态的传递矩阵。以参考文献[12]中参数选取原则,选取全息面为1 m×1 m的平面,采样间隔0.05 m,全息面与声源的距离d=0.1 m。采用Ansys和Virtual.Lab实现水下振动-声辐射的仿真计算。为模拟噪声的影响,同时对传递矩阵H和观测向量pH加入不同程度的随机扰动噪声,信噪比约为40 dB。NTLS方法实现时,选取ε=10-6,ξ=10-6, 迭代初始值x0=0n×1,迭代初始正则化参数λ1=10-2,最大迭代数分别为kmax=500,lmax=5 000,L为一阶差分矩阵。采用下式来评估重建相对误差
(13)
在水下声源识别之前,利用条件数对声场传递矩阵的病态性进行诊断和度量,即图1为方程(7)中传递矩阵H的条件数随着全息面测量距离的变换曲线(频率f=750 Hz)。可见,随着测量距离的增加,条件数呈指数增长的趋势且数值较大。究其原因,主要是声场重建过程中,声场中的声波有高波数倏逝波和低波数传播波,前者只能在近场传递,而后者可达远场。NAH技术就是充分利用了倏逝波成分,能获得高分辨率的重建图像和丰富的声场信息。高波数倏逝波成分对应传递矩阵中小的奇异值,随着测量距离的增加,将难以获取远场的高频成分,即奇异值将不断变小,对应的条件数将变得很大,传递矩阵病态性将越严重。此处取全息测量面距源面的距离d=0.1 m,对应的条件数为3.028×109,显然为严重病态矩阵。
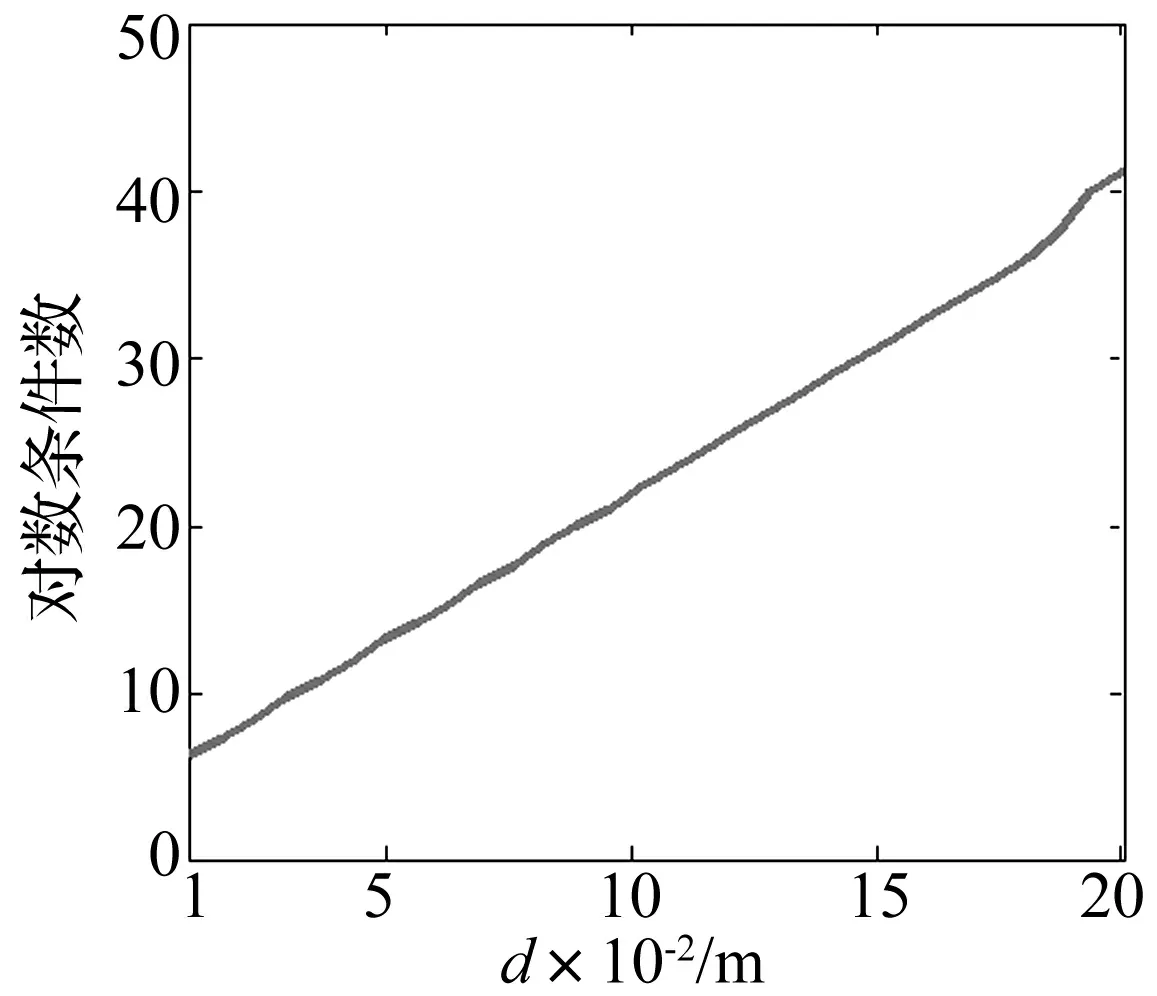
图1 测量距离对条件数的影响Fig.1 Variation of condition number of matrixH with the measurement distance
图2(频率f=750 Hz)为声源表面实测的振动速度响应幅值云图,图中显示了主要声源的位置以及声场的具体分布情况。图3(频率f=750 Hz)为式(7)直接重建的结果,因传递矩阵的严重病态,而且传递矩阵和全息测量面的声压信息均存在一定测量或数据处理误差,导致声源重建的主要声源位置与实际位置相距甚远,且速度幅值明显大于真实值。显然,由式(7)重建的声源结果是不可信的,失去了重构价值。图4(频率f=750 Hz)为本文提出的NTLS正则化NAH技术的声源重建云图,从图中可以看出,NTLS正则化NAH技术重构声源分布趋势与实际吻合较好,准确地定位了主要噪声源的位置,重建的振动速度幅值具有较好的精度。因此,在NAH技术重建声场的过程中,正则化技术是不可或缺的重要组成部分,笔者提出的NTLS正则化NAH技术能够有效的实现水下振动声源的识别与定位。
为了对比不同正则化NAH技术的效果,图5给出了在不同频率处不同正则化方法的声源重建结果的相对误差,分别为直接测量法、Tikhonov正则化方法辅以L曲线确定正则化参数(LS正则化方法)、NTLS算法。从图中可看出:正则化处理后的声源重建结果大大优于直接重建结果,后者重建误差基本保持在10 dB以上,已经无法实现声场的重建,进一步证明了正则化技术在近场声全息过程中的重要性;LS正则化方法没有对传递矩阵和观测向量可能存在的误差进行综合考虑,其重建速度场的误差普遍高于NTLS算法。可见,笔者提出的NTLS算法在近场声全息的声源重建时,能够更加贴近于工程实际,声源识别和定位的精度更高。
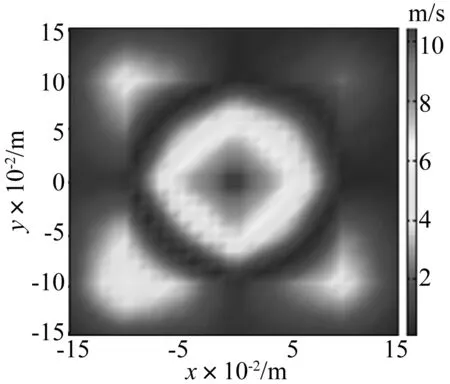
图2 声源表面实测振速分布Fig.2 Exact solutions on the source surface
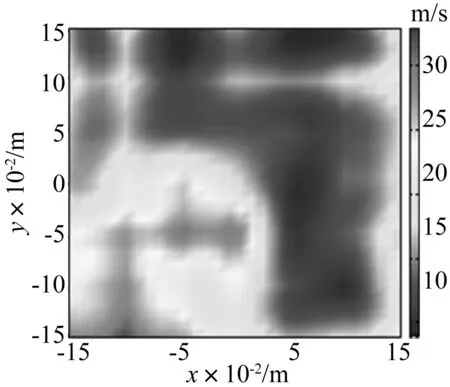
图3 直接重建的声源表面振速分布Fig.3 Reconstructed normal velocity without regularization
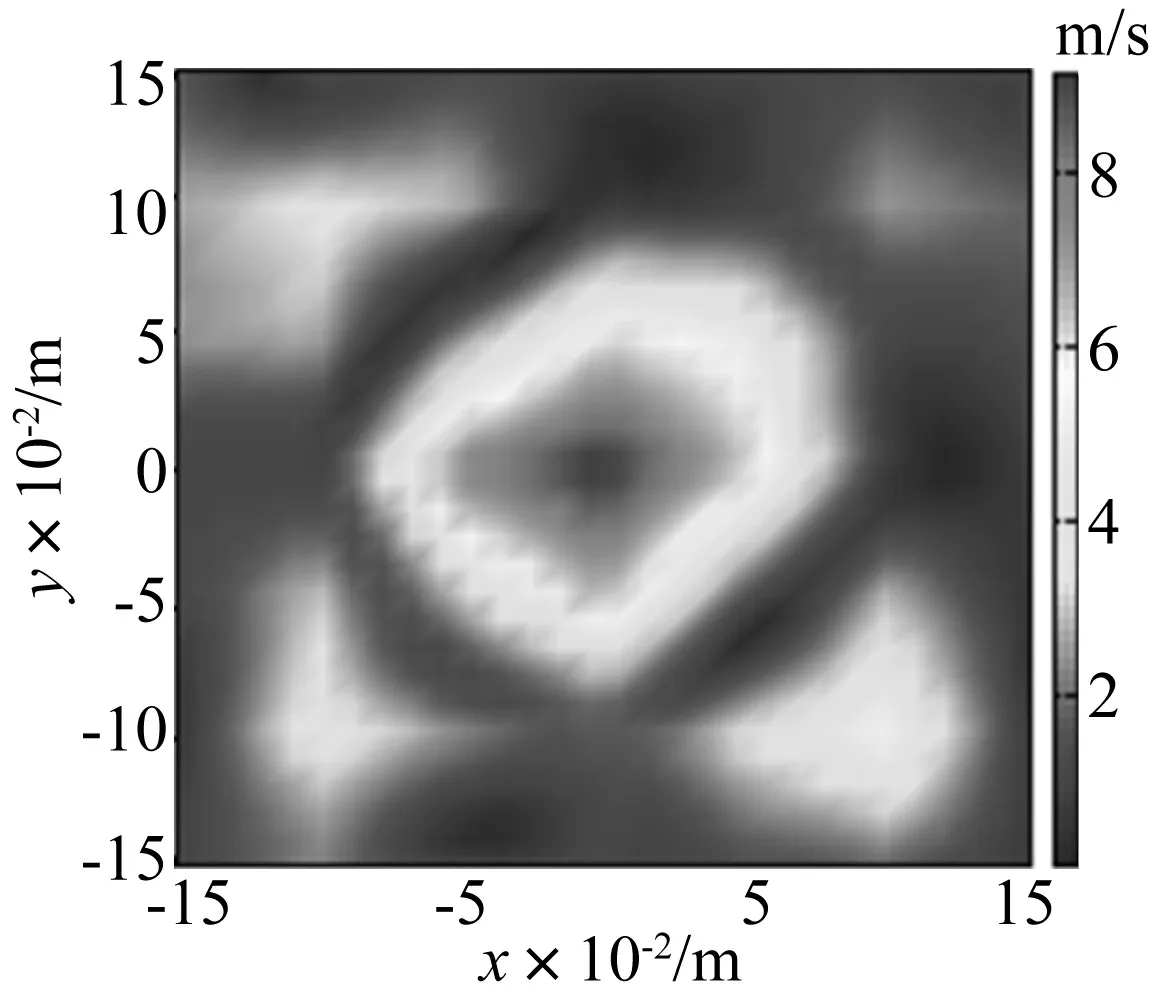
图4 NTLS方法重建的声源表面振速分布Fig.4 Reconstructed normal velocity using NTLS method
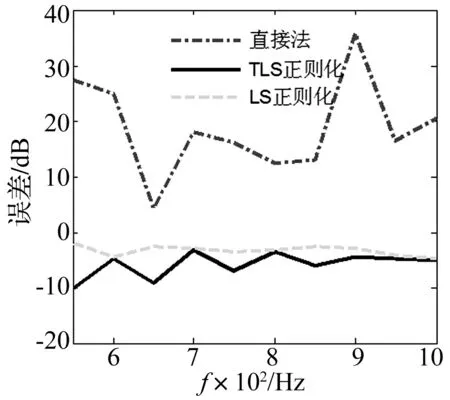
图5 不同正则化方法的重建误差比较Fig.5 Reconstructed error of the different regularizationmethods
4 实验研究
为进一步验证提出的NTLS方法在水下声源识别中的有效性和优越性,对换能器声场进行平面近场声全息测试与分析实验。本次实验是在北京某消声水池进行,水池尺寸为16 m×8 m×8 m,6面消声,换能器发射面直径0.17 m。发射信号参数:发射连续的sinc函数信号,频率为1 kHz。具体的测量参数选取为换能器与测量面1距离为0.225 m,换能器距水面距离为3.8 m,扫描面尺寸为1.8 m×1.44 m(位于xoy坐标平面,x∈[0,1.8],y∈[0,1.44]),测量空间点间隔为0.06 m×0.06 m。
结合距离声源0.425 m的测量面2的测试数据,采用NTLS正则化NAH技术重构得到距离声源0.225 m测量面1的声压幅值,如图7所示。图6为直接测量的结果,图8为未经正则化处理即(式(7))的重建的声压分布。
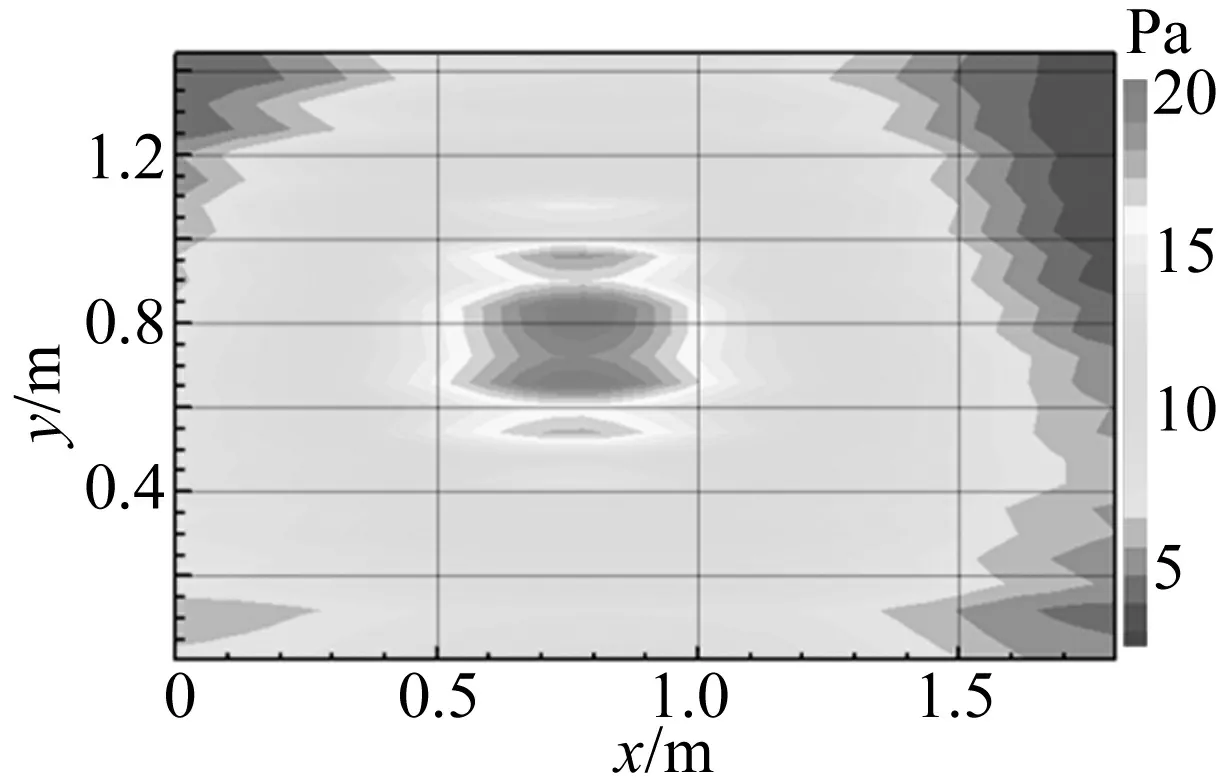
图6 测量面的声压分布Fig.6 Exact solutions on the holograph plane
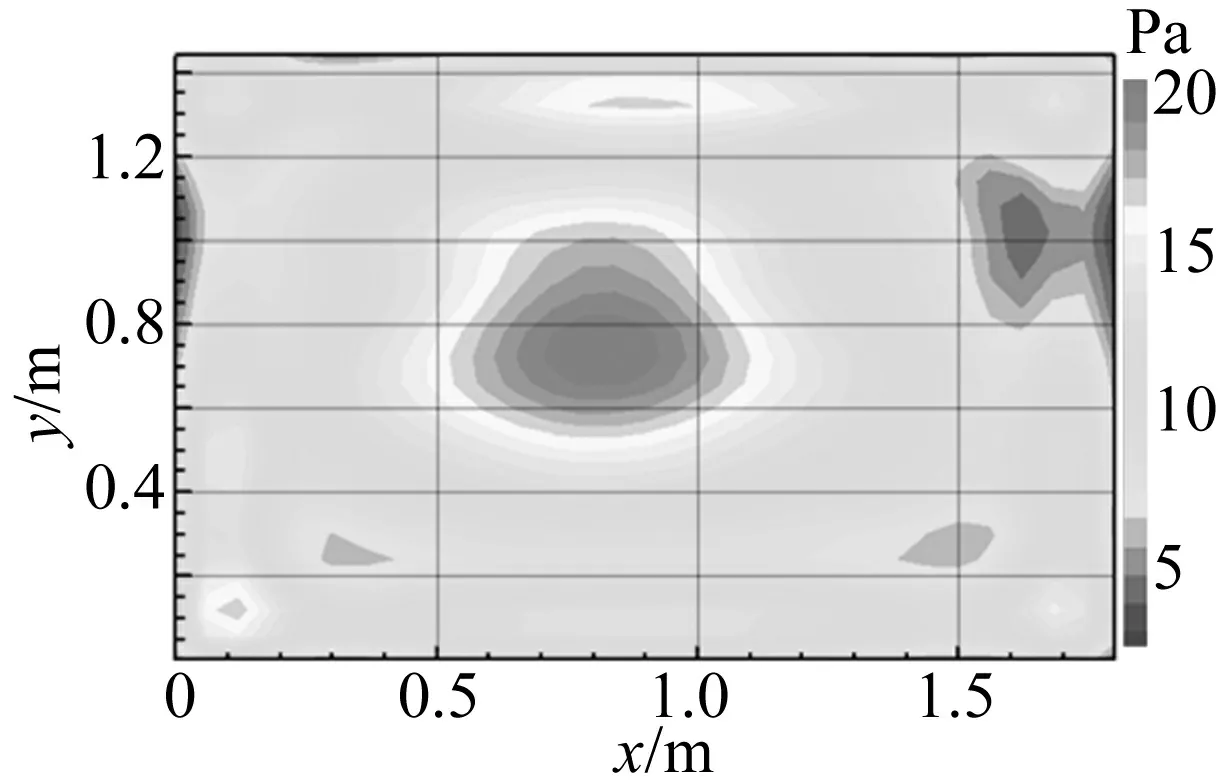
图7 NTLS方法重建的声压分布 Fig.7 Reconstructed sound field using NTLS method
从图6~9比较可以看出:基于NTLS方法重构的声场与直接测量声场云图的分布趋势基本相同,两者的声压幅值吻合较好,而且反演面的声压分布和声压幅值精度都要明显优于基于LS正则化方法反演的结果。而未经正则化的NAH技术重构的声场分布情况与直接测量的值存在较大差别,且幅值普遍偏大,这主要是因为传递矩阵病态特性的存在,数据在测量和处理时存在的微小误差在反演过程中将被放大。若不采用合理的方法对NAH技术进行修正,任何较小的误差都可能使重建结果变得毫无意义。而本文提出的NTLS方法能够在近场声全息实现过程中避免这种不足带来的误差,保证了声源识别和定位的可靠性和稳定性。图9为基于NTLS方法重建的距离声源0.005 m的声场分布图,其与实际振源的位置比较吻合。
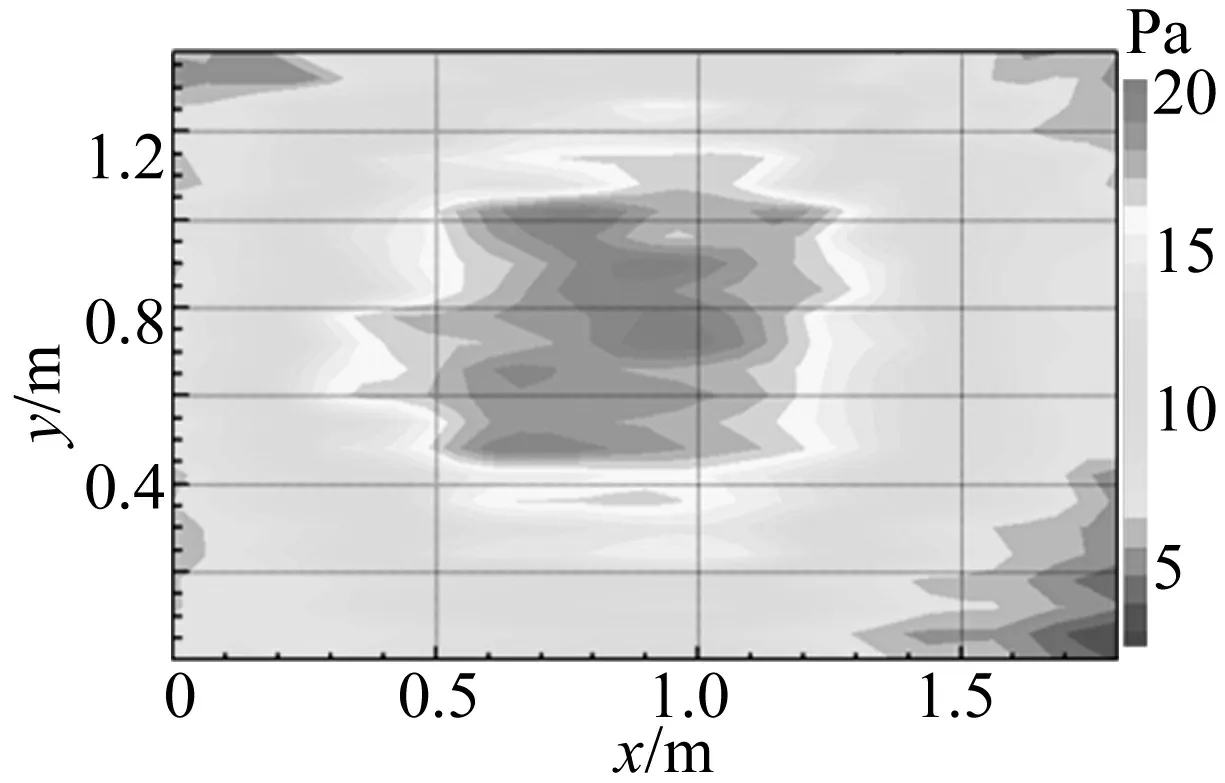
图8 LS方法重建的声压分布 Fig.8 Reconstructed sound field using NTLS method
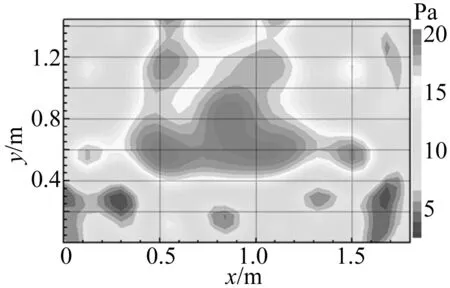
图9 直接计算测量面的声压分布Fig.9 Reconstructed sound field without regularization
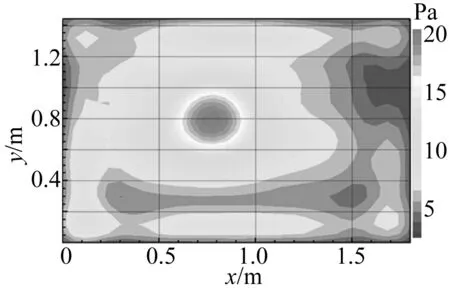
图10 NTLS方法重建声源的声压分布Fig.10 Reconstructed pressure using NTLS method on the source surface
5 结 论
近场声全息在声源识别过程中存在典型的不适定性问题,将导致声场无法重建、声源识别错误,这在水下复杂的噪声环境中显得尤为突出。为此,本文提出能综合考量声振传递矩阵和全息测量面误差影响的NTLS正则化的NAH技术,其具有较好的收敛性、稳定性、编程易实现等优点。通过NAH的仿真算例和试验,证明了正则化处理在NAH技术实现声源识别过程中是不可或缺的,而笔者提出的NTLS正则化方法优于现存LS正则化方法,前者重建声源分布云图与实际测量结果趋势相同,更加准确地定位了主要噪声源位置。NTLS正则化的NAH技术在水下声源识别时能够更加贴近于工程实际,其声源识别和定位的精度更高。
[1] 曹跃云,张磊,杨自春.舰船振动噪声传递路径分析及试验验证[J].振动与冲击,2013,32(22):158-162. CAO Yueyun, ZHANG Lei, YANG Zichun. Transfer path analysis of ship vibration sources and experimental validation[J]. Journal of Vibration and Shock,2013,32(22):158-162.
[2] 郭小霞.水下结构辐射噪声源快速诊断识别研究[D].哈尔滨:哈尔滨工程大学,2012.
[3] WILLIAMS E G,HOUSTON B H.Fast fourier transform and singular value decomposition formulations for patch nearfield acoustical holography[J].J. Acoust. Soc. Am., 2003,114(3): 1322-1333.
[4] DELILLO T,HRYCAK T,ISAKOV V.Theory and boundary element methods for near-field acoustic holography[J].Journal of Computational Acoustics,2005,13(1):163-185.
[5] 毕传兴,陈心昭,周蓉,等.Landweber迭代近场声全息[J].科学通报,2006,51(9):1101-1111. BI Chuanxing, CHEN Xinzhao, ZHOU Rong, et al. The near-field acoustic holography based on iteration landweber [J]. Chinese Science Bulletin, 2006,51(9):1101-1111.
[6] JESPER G. A study on regularizration parameter choice in near-field acoustical holography[J].J. Acoust. Soc. Am.,2008,123(5):3385.
[7] 李凌志,李骏,卢炳武, 等.平面近场声全息中的正则化参数的确定[J].声学学报, 2012,35(2): 170-178. LI Lingzhi, LI Jun, LU Bingwu, et al. The determination of regularization parameters in planar nearfield acoustic holography[J]. ACTA Acoustic, 2012,35(2): 170-178.
[8] 贺春东,毕传兴,徐亮,等.用于近场声全息正则化的共轭梯度法[J].振动工程学报,2011,24(1):67-72. HE Chundong, BI Chuanxing, XU Liang, et al. Regularization of the distributed source boundary point method based nearfield acoustic holography by using conjugate gradient algorithm[J]. Journal of Vibration Engineering, 2011,24(1):67-72.
[9] MAZIAR S,HOSSEIN Z.Computational experiments on the tikhonov regularization of the total least squares problem[J].Computer Science Journal of Moldova,2009,17(1):14-25.
[10] BECK A,BEN-TAL A,KANZOW C.A fast method finding the global solution of the regularized structured total least squares problem for image deblurring[J].SIAM Matrix Anal. Appl.,2008,30(1):419-443.
[11] ORAINTARA S,KARL W C,CASTANON D A,et al.A method for choosing the regularization parameter in generalized tikhonov regularization linear inverse problems.image processing[J].Proceedings,2000,1:93-96.
[12] 辛雨.基于空间声场变换的近场声全息参数选取及重建误差研究[D].合肥:合肥工业大学,2009.
Near field acoustic holography based on Newton iteration total least square regularization
ZHANG Lei, CAO Yueyun, YANG Zichun
(Power Engineering College, Naval University of Engineering, Wuhan 430033, China)
Near field acoustic holography (NAH) is a very powerful tool for identifying sound sources. The identification process based on NAH was firstly converted into solving linear equations here, it was a linear, ill-posed inverse problem. And then, the ill-conditioned property of the ill-posed problem was ascertained. To find meaningful solutions to such a system, a novel Newton iteration total least squar (NTLS) method when both the transfer matrix and the measured sound pressure were contaminated by errors was proposed. The NTLS method included three parts. Firstly, Tikhonov regularization for a TLS problem was converted into an unconstrained optimization problem with properties of a convex function, the optimization problem was solved with Newton iteration method. Secondly, the adaptive strategy for selecting regularization parameters was established. Finally, the robustness and effectiveness of the proposed method were demonstrated with NAH simulations and tests. The results showed that the NTLS method provides a significant improvement for identifying and locating sound sources.
near field acoustic holography; total least square; regularization method; sound source identification
总装十二五预研基金
2015-07-14 修改稿收到日期:2015-09-22
张磊 男,博士,讲师,1986年生
曹跃云 男,博士,教授,博士生导师,1963年生 E-mail: soaring66@163.com
TB532;U66.44
A
10.13465/j.cnki.jvs.2016.21.015
猜你喜欢
数学物理学报(2022年4期)2022-08-22
压电与声光(2022年3期)2022-07-16
机械设计与制造(2022年4期)2022-04-28
怀化学院学报(2021年5期)2021-12-01
兰州理工大学学报(2021年3期)2021-07-05
兰州理工大学学报(2021年3期)2021-07-05
海洋信息技术与应用(2020年1期)2020-06-11
铁道通信信号(2020年12期)2020-03-29
汽车工程(2018年12期)2019-01-29
家庭影院技术(2018年11期)2019-01-21