无畏险阻跨出新路
2016-12-13 15:57熊伟
兵器知识 2016年12期
熊伟
“跨越险阻2016”挑战赛的E组比赛,要点有两个。一,山地输送。要爬非常陡峭的山坡,跨越多重高墙、壕沟,其路况即便是我们人走起来,都会觉得难。二,非仿生。平台不像狗、虫等动物,用“腿”行走、过障,还是依靠看似传统的轮胎、履带。因此各参赛队的重点就是如何创新设计出新颖独特的轮、履结构,车体样式。大多数参赛队选择了摇臂轮式结构,通过摆臂抬起车轮,从而实现爬墙过障。还有前后车体铰接,通过弯折车体,来兼顾过障、转弯的机动需求。
陆军军官学院的“无畏者”无人车,结构很新颖,像履像轮又像铰接。它的行走原理,简便地实现了快速越障,给大家留下深刻印象。预赛时该车出现意外,没能进入决赛。但在北京进行决赛时,车队作为唯一被邀请参加展示环节的非决赛队伍,来到了北京。这是为什么呢?记者为此采访了该车队的队长,陆军军官学院的陈向春老师。

陆军军官学院,是一所承担陆军指挥生长军官“学历教育合训”任务的院校,学院的前身是1978年成立的炮兵技术学院,由邓小平同志亲自选址合肥,2011年6月改建为陆军军官学院。学院结合了工程院校、指挥院校和综合院校的办学实践,在教育理念、基础教育、科研学术、人才复合素质等方面具有特色和优势。对于受邀参加决赛的展示环节,陈向春老师介绍说这得益于在预赛前后,“无畏者”的优秀表现。
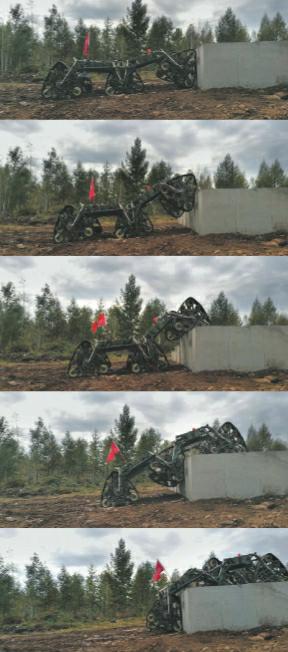
“无畏者”无人车长约5米,宽约2米,自重约2吨。记者刚看到它的六个三角形履带时,还以为和一种雪地车一样。结果陈老师告诉记者,它叫做“等三角行星结构履带轮”。等三角、履带这俩词都好理解。行星结构呢?这是一种行星轮,意思是它像太阳系的行星一样,不仅能自转,还能公转。

平时行走时,履带绕着三角架内的几个小轮旋转,这倒是和那种雪地车一样。你也可以把它看作是有六圈履带的坦克、拖拉机。但这个三角架不是固定的。遇到高一些的障碍,履带无法直接克服时,整个三角架就会在阻力作用下旋转,变成了一个三角形的大“轮胎”。
听完陈老师的讲解,记者不禁想到了很多大妈大爷们买菜用的一种小车——下面也是个三角架,顶端是三个小轮,平时两轮着地,上楼梯时三角架翻滚。
再这么一看,它的行走方式简单而巧妙。陈老师介绍说,三角架转动,不仅是像大轮子,还使爬垂直墙的附着力大大增加,提高了过障能力。普通轮式车只能爬上轮胎半径一半高度的垂直墙,而且爬墙时,轮胎和墙的接触只是与墙相切的一条线。履带车过墙,最大高度取决于前面诱导轮的高度,履带和墙的接触也基本只是只是与墙相切的一条线。而“无畏者”过墙时,随着行星轮转动,三角形的一个边都会贴到墙上,接触面很大,附着力大大提高。由于这个原理,“无畏者”只需要不高的发动机功率,就展示出良好的越野能力。它的动力来源于六个行星轮中间的电机,每个仅2千瓦左右,一共约12千瓦。这只相当于C组小型无人车的20多倍(车重是后者的30倍)。至于同在E组的其它车辆,都是100、200千瓦的发动机。“我们虽然动力小,但动力都用上了。”
电动机通过传动机构带动行星轮上的一个主动轮转动,驱动履带。至于三角架的转动,则是根据地形自动适应,不需控制。因此该车的操控也很简单,不像摇臂式那样需要另外配备电机或动力源,来驱动摇臂转动。
看着前后车体之间除了转轴,还有一根活塞杆,记者询问这是不是像其它某些参赛车一样,控制铰接车体的俯仰。不料陈老师说这只是一根阻尼杆,没有动力、不需控制的。原来在攀爬障碍时,前部车体完全靠前方履带的上爬,自己仰起,不需动力抬它。阻尼杆,是为了防止前后车体之间太“活”,过沟、下墙时,出现咣当掉地的摔车现象。
因此该车的遥控设备也很简单,就是买了一个普通小遥控车的遥控器。操作员也只需要控制车的两侧电机,也就是两侧速度,就可以了。速度有差异,就能像坦克那样差速转向。越墙、过沟、爬坡时,则控制好前进速度快慢,防止车体中部剧烈起伏,就可以了。
不仅原理简单、巧妙,它在结构件选择上的简单也超过了记者的预想——电机就是电动车上的电机;小轮之间的弹簧减震器,就是电动车上的减震杆;连接三角架中心和车体的,就是摩托车前轮的减震杆;履带,是农用拖拉机上的,直接买来套上;车体、行星轮三角架,是自己加工焊接的(记者看到,有的铁架上还有明显的缺口、修补,真是“朴素”得很)……一圈转下来,只有行星轮中间那些白色的尼龙轮,是设计团队定做的。
原来这次参赛,陆军军官学院开头只是报着试试看的态度参加,没有准备多少经费。像有些无人车上用的大功率电机,一个就得9万多,减速器14万,6个轮子还得乘以6。而“无畏者”的整车花费,都没有那么多。

也正是这个原因,让“无畏者”在预赛中出现设备故障,没赛出好成绩。它的电机和链条之间,是通过采购现成的普通涡轮蜗杆连接的。整辆车从7月初才开始设计制造,花了暑假不到两个月时间,加班加点赶制出来。比赛前,它在学院的试验都很顺利,能过墙过沟。这也让学院领导感到高兴,还专门给车队饯行。预赛前,考虑到多次试验后的磨损,车队把六个行星轮里的蜗杆换成了新的。参加完开幕式后,“无畏者”从比赛场地返回场区,走的也是泥泞路,给在场人员留下了深刻印象。可没想到这采购来的普通民品,质量完好率可没他们预想的那样高,厂家也不知道他们是要拿去翻墙过沟走泥路。结果几天后的比赛中,两根蜗杆折了,“无畏者”一下失去三分之一动力。第二天,车队从旧蜗杆中挑了两根换上,自己到比赛场地跑了一趟。高墙、壕沟、水坑、泥泞路、侧倾路、陡坡,都轻松走过,越障能力表现突出,用时48分钟(预赛中最快的约30分钟,但没完成高墙、泥泞路科目)。


速度不快,与它的动力不足有很大关系。这也是因为经费不多,车队没有采购更大功率的电机。记者看到行星轮里的空间其实还有不少,可以安装更大设备。在记者看来,整车在具体结构、尺寸上,还有不少是在将就那些现成的履带、减震杆、电机,不算是按照设计本意选择的最优化值。如能完全地“设计设计”,各零部件的性能、规格更加合适,“无畏者”的性能会有很大提高。
陈老师也说是这样,但比赛就是比赛,必然会有很多偶然因素的。“人家成绩好的,确实还是说明人家做得好。”他表示现在“无畏者”还只能算是原理样车,自然还有一些要改进的地方。从原理上讲,它具有一定的优势。但在工程化的层面上,还有很多工作要做。发展到正样车阶段,可靠性就得更高了。
除了经费,两个月时间太短,没法做出定制零件,也束缚了他们的手脚,还有一些设计、想法尚未在“无畏者”上得到体现。
原来这辆“无畏者”,是在学院设计过的好几款无人车基础上,集合而成的。陆军军官学院有一个“学员创新俱乐部”,老师们带着学生做一些设计,参加全军军用机械创新大赛,全国大学生机械创新大赛。他们设计的小型越障车,玩具那么大小的,参加比赛时都获得了一等奖。这次挑战赛前,组委会到学院调查,看到他们的小车结构新颖独特,于是邀请他们参赛。

学院领导对此很重视,也放开思路,大胆决定由年轻人来当这个项目主要人员。像陈向春老师作为项目组长,是讲师,团队成员都是学院本科生,这样的团队在这次挑战赛里独一无二。
虽然名次成绩不理想,但陆军军官学院的这个创新团队还是表现优异,在这个全国的平台上得到很多业内专家的认可,也因此受到组委会特别邀请,参加决赛阶段的展示表演。
学院教研人员们对这种新式行动装置的理论研究,也得到挑战赛主办方的高度认可。挑战赛同时进行了学术论坛,出版论文集。陈向春老师等人联合撰写的有关一体化动力轮技术的论文,被评为优秀论文。
也许在不久的将来,我们就可以看到这种独特的无人车,伴随着战士们翻山越岭,无畏地跨向新时代战场。
猜你喜欢
专用汽车(2022年2期)2022-04-05
科学与生活(2021年24期)2021-12-06
创新作文(1-2年级)(2017年11期)2018-04-17
足球周刊(2014年33期)2014-11-14
棋艺(2014年2期)2014-05-23
数学教学(2013年8期)2013-11-18
计算机辅助工程(2012年5期)2012-11-21
坦克装甲车辆(2000年6期)2000-06-13