砺剑精兵
2016-12-13 15:51熊伟
兵器知识 2016年12期
熊伟
[编者按]在“跨越险阻2016”挑战赛C组预赛中,南京理工大学的“砺剑”无人车仅用12分钟就完成所有越野科目和侦察科目,以突出成绩获得第一名。整个比赛过程中,笔者有幸多次采访了该车研制团队——南京理工大学计算机科学与工程学院的主要负责人,朱健声和蔡云飞老师。


蔡云飞老师向记者介绍,“砺剑”无人车也称为“地面多任务无人机动平台”,目前研制有IV型和IV-A两款型号。在预赛种,他们使用的为IV型(参见下图),长1.015米,宽0.614米,车体高度在0.305到0.36米之间可变,自重50千克,有效负重30千克,最大行驶速度17千米/小时。决赛时,上场的是IV-A型,长1.12米,宽0.625米,车体高度在0.34到0.43米可变,自重 55千克,载重30千克,最大行驶速度25千米/小时。他们的总体结构和主要技术特点都相似。
这个研究团队从1997年就开始从事地面轻小型无人平台的研究工作,先后对履带机器人传动、变速、行走、悬挂、车体结构、履带变形机构、操控终端等各方面都进行了颇具成效的研究,获得多项国家发明专利。在成果的工程化转换方面,他们也积累了丰富的理论和实践经验。该团队主要成员研制的移动平台,已成功应用10年,发挥了重要作用。2011年提出的履带式侦察机器人结构方案,也获得肯定,在此后的研制工作中先后攻克了机器人技术重点的各项难题、关键性技术,比如总重限制、工作时间、快速分解组合、武器快速挂接、同步瞄准、击发控制、倾覆复位、大转矩高精度云台、底盘降噪、武器后座缓冲、载荷举升与俯仰调节机构等等。

记者在比赛现场也感受到,朴实的朱健声老师在业内有比较高的知名度,很多其他参赛队都对他们的设计有不少了解,看好他们的比赛成绩。
记者注意到,参加C组决赛的6辆无人车,虽然都是履带的,但“砺剑”、“星越”两车的行走机构和其它车不同。蔡老师介绍说,这两车的行走装置是悬挂履带式的,决赛中的其它无人车都是非悬挂履带式。像国外的“魔爪”、PackBot那种无人车,还有很多排爆机器人,都是不带悬挂的,刚性底盘结构,其好处是平台姿态稳定性高,能满足排爆等特殊任务的高精度操作需要。

“我们这个是面向野战用的,具有高速、高通过性。”蔡老师介绍说,那种刚性悬挂的轻小型无人车他们2008年起也研制过,但存在几个固有缺点无法克服。一是地面适应性差、速度低、越野性能差,很难趟水过河,在烂泥地、草地、鹅卵石、砖块废墟等环境中行驶还很容易掉履带。二是观察视窗跳动厉害。由于它的车体与履带间没有柔性的悬挂,地面的起伏都会传到车体上,导航摄像头传回的图像会剧烈跳动,操控者看久了会严重不适。如果导航摄像头装在车体上,操作员相当于贴着地面“看”周围,视野范围还会比正常情况小很多。记者观察过几款无人车的操控台,从显示屏上看到的图像确实非常非常别扭。模糊不清是一方面,更重要的就是太“矮”,判断距离、方向时都和原本的感觉差别很大。
“砺剑”研究团队在履带高效率转向传动及控制、履带地表适应性变形技术等方面,做了很多努力,在平台上采用了可升降悬挂,可以在悬挂车体和刚性车体两个状态间自由切换,并可通过四个方位的独立升降悬挂进行车体姿态调整。

普通行驶时,它的外形有些像一辆小坦克,能爬上25厘米高的垂直墙,爬上35°的坡。负重轮上下活动的行程可以达到5厘米,IV-A型则达到了9厘米,因此能承受高速越野行驶时的强烈震动和冲击。这次挑战赛中有楼梯,预赛中有沙坑,碎砖、土堆组成的陡坡,对“砺剑”来说都没有问题。朱老师还认为预赛场地简单了点,决赛时很希望能到前面的河滩、鹅卵石路况下跑一跑。
“砺剑”的悬挂调低后,车底距地高从13厘米降到5.5厘米,履带接地长度从56厘米增加到88厘米。这不仅让它能跨越45厘米宽的壕沟,还提高了纵向、横向的稳定性,在五六十度的纵向坡面上都不会倾覆。
非悬挂的履带行动装置上,履带和主动轮、诱导轮、负重轮之间,要有比较大的张力,是绷紧的,容杂量小而排杂能力差。而转向,会让地面杂物大量进入履带、悬挂空间。杂草、粗沙、污泥等卡入履带和轮子中间后,不容易排出,导致张力过大,无法转动。而在有悬挂的履带上,轮履之间有一定的弹性空间,不会急剧增加主动轮的转动负荷,沙石草等可以在滚到下一个轮子时逐步脱落。

对于履带车来说,转向靠两侧履带差动、反转,因此防脱落是个关键课题。研究团队经过十多年摸索,有了一些独特的履带防脱技术,能在草地、沙石地、泥泞地等各种恶劣地面行驶。按照蔡老师的话说,就是“不会掉履带,随便你怎么玩。”
“砺剑”使用双流转向控制模式,后部的动力舱里布置有两台电动机,主电机350瓦,转向电机250瓦。行进时只需一个电机工作,传动效率较高。比赛中,“砺剑”只是采用了普通高速档,速度就已经比其它无人车快了近一倍,给观赛者留下了非常深刻的印象。
朱老师介绍说,“砺剑”还能采用混合动力模式,也就是一个电机加一个内燃机。变速箱上有两个动力输入点,其它都是一样的,直接接上就行。两个发动机如果同时工作,无人车的速度能更快,试验中曾达到近50千米/小时!当然此时回传的图像已经抖动剧烈,操作员不容易控制了。所以内燃机的最大用途,还是便于在野外长期工作,免除了充电的麻烦。
依靠车内电池,“砺剑”能连续运行至少4小时。无人车要想得到很长的续航时间,可以外接电池,但防水问题很难解决。车体内的电池,防水防震,但更换起来麻烦。有了内燃机,无人车可以“快速复活”,花一两分钟加上油就可以了。这也适合快速反应。

这个内燃机还可以给电池充电,记者看到车体内就有一些24伏、12伏电源输出口。外场维修时,电动螺丝刀、电烙铁等工具,都可以接到这里。手机、遥控设备也可以在这里充电。当然,采用内燃机也有一些缺点。一是噪音大,二是加上散热器、油箱等,会占用载荷舱的一半空间。如果车体再大一些,更适合采用这种混合动力系统。
记者询问是否能用小一些的内燃机,专为充电用,这样既保证尺寸,又具备野外长期工作的方便。朱老师解答说:内燃机充电的效率不高,直接驱动无人车行驶更合适一些,不太适合专为充电而设置。如果少量地用电,太阳能电池板倒是也可以考虑。
总得来说,依靠电控机械变速箱、双流传动、多动力复合驱动等技术,“砺剑”无人车在动力系统这块比较灵活,怎么配置就看各种不同的需要了。
朱老师打开动力系统上的舱盖介绍时,顺手打开了车体上另外几个盖子。那是工具箱,其它无人车很少有这样的设置。蔡老师介绍说,这也是因为他们的无人车已经比较成熟,不再是原理样车,可以算型号的初样车了。再过一轮设计修改,就可以作为正样车,“然后全部工程化,基本上就OK了。”

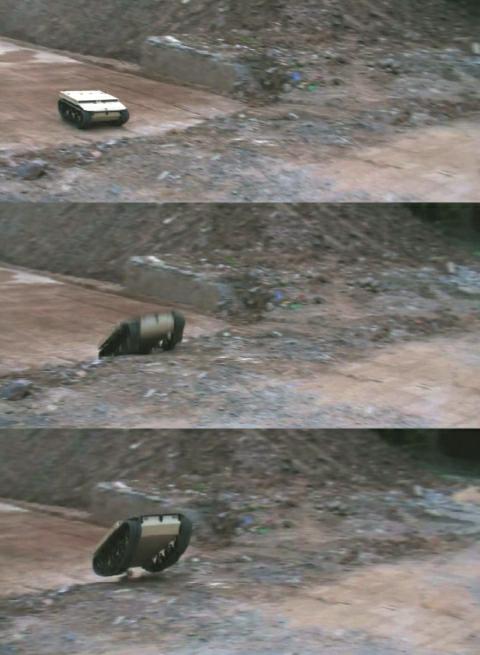
从样车到成熟产品,确实还需要很多路走。在决赛中,“砺剑”无人车就因为一个小细节,引起翻车。它的车体中部是载荷舱,尺寸不小,40×27×23立方厘米,可以放多种设备。整车自重50~55千克,载重能达到30千克。但在这次比赛中,它的负载能力用不上,车顶搭载了一个球形光电探测器就足够了。载荷舱内前部被临时加装了一块电池,增加配重,进一步提高爬楼、过障时的稳定性。还不是正式的载荷,因此也就没采取螺栓等固定措施。从头一天熟悉场地开始,团队多次操纵无人车在楼梯、草坪等场地试驾。测试后,团队认为自己只需半小时就能完成比赛。预赛成绩已经领先其他队很多,只要找到18个目标中的5、6个,他们就能稳获冠军(总成绩由预赛分和决赛分加权平均得出)。但为了充分展示性能,团队决定奔着找齐18个目标去。楼内9个目标要比楼外的相对集中,因此他们制定了先上楼侦察,后室外侦察的策略,希望能把所有目标都找到,而且看起来问题不大。


正式比赛时,“砺剑”一马当先,比同组比赛的另外两车早早进入楼房,快速向三楼爬去。观赛者都为他们的速度赶到惊叹(其实这只是他们的正常速度),现场解说也告诉大家他们是预赛第一名,速度快、越野能力强。不料经过前一天的多次试跑、爬楼、颠簸,载荷舱里的电池有些松动了。这次爬上两层楼后,在持续震动下,电池滑向了载荷舱后部,整车重心突然偏后。结果无人车从楼梯上倒翻过来。对于经过加固考虑的车体来说,这没多大问题,但车顶的光电探测器被压坏,无人车失去了最主要的观察设备。此后它只能依靠车体上的驾驶用摄像头寻找侦察目标,效果大打折扣。而且在翻回车体过程中,一个小摄像头不慎被手指、胶带弄模糊,现场维修后的“砺剑”成了高度“近视眼”。天线也因翻车受到些影响。结果无人车几次从侦察目标旁经过,都没能看清目标。寻找到的目标数量少,影响了“砺剑”的决赛总分。
赛后整个团队也是因为这个意外而感到遗憾,蔡老师说接下来的工作就是要在工程化这块做最后的细化、完善。
这次挑战赛中,绝大多数轻小型无人平台都是样车,并非完成所有工程化设计的产品,有的甚至只是概念型样车。再加上无人平台是动力、机械、通讯、光电等多方面技术的集成,因此意外频出。有不少都并非设计、结构不好,而是某个小小的细节、意外影响了参赛表现。
“砺剑”这一跟头翻得,让很多观赛者都感觉很可惜。不过对这类轻小型无人车来说,这样的情况不会造成重大伤害。决赛中另外一辆小车也在爬楼时翻车。它们的车体都能经受这种冲击、碰撞。
不仅如此,“砺剑”的车体还有很好的密封性,让该车能在水面浮渡。设计团队通过十多年研究,已经掌握了一套高强度、高抗变形箱体材料及成型技术。以前的试验中,它们还经受住了武器射击时的冲击、碰撞。
武器站能通过螺栓直接固定在车顶,或载荷舱位置。它的设计载荷为30千克,实际上能达到六七十千克。而30千克,已经是满足一整套单兵装备的重量,包括武器弹药等。如果带反坦克导弹、大威力火箭筒,能有2枚,轻型火箭筒能带4枚。以它的尺寸和速度,能快速突进到敌方车辆附近几百米,即便用无制导的火箭弹,也能快速抵近、毁伤目标。

利用这套箱体材料和成型技术,还能根据需要设计制造不同尺寸的无人车。履带、行走系统也都是模块化设计,有几种可选,包括履带板的形状,负重轮悬挂的方式等。比“砺剑”小一些的同系列无人车,也具备良好的越野、高速性能,可以带榴弹等武器。
在轻小型无人平台(也称地面轻小型机器人)研究领域,“砺剑”无人车设计团队的主要成员都具有10年以上的技术积累和实际工程经验。在随后的采访中,记者和他们也就无人车的战场应用交流了很多看法。
“魔爪”、PackBot等无人车已被美军广泛用于阿富汗、伊拉克战场,负责路边炸弹检查、拆除,山洞内侦察,甚至进攻性战斗等任务。
俄罗斯也有多款无人战车、无人扫雷车投入实用。2016年年初,在叙利亚战场,俄军6辆无人车投入了一次高地争夺战。遥控人员操纵他们抵近到IS武装分子据点前100米,用机枪和火箭筒进行火力压制,叙利亚政府军士兵则在无人车后150~200米的安全距离对敌人进行清扫。遇到坚固火力点后,无人车传回图像、坐标,引导榴弹炮进行拔点炮击。战斗持续了20分钟,IS武装分子没有还手之力,被击毙70人,而叙利亚政府军只有4名士兵受伤。
俄军投入战斗的“平台M”履带式无人车、“阿尔戈”轮式无人车和美军无人车相比,就有很大不同。它们重量更大,分别为0.8和1吨,高度1.2和1.65米,配有防护装甲;火力强悍,除了一挺7.62毫米机枪,还有4、5具火箭筒、榴弹发射器。

“砺剑”无人车研究团队认为:反恐、排爆和作战行动相比,时间更加充裕,无人车也不需要带很多载荷;而战斗行动(无论城市还是野外),即便是反恐行动的侦察,无人车都必须有足够的反制措施,配备一定的武器或装甲。遭遇敌方攻击时,它能利用火力予以反击,或利用高速等措施进行规避、摆脱。即便是反恐战争中的排爆行动,也需要无人车具备一定的反制能力。比如伊拉克反美武装曾雇佣小孩,拿着油漆喷罐走到PackBot无人车前,往摄像头上一喷,价值成千上万的无人车就歇菜了。跑跑不过,打又不方便打。
如果是巷战,弹坑、断墙会是常见的障碍。即便没有这些障碍,也有人想出过一些专门针对小型无人车的简单办法,比如用渔网罩上,看你怎么摆脱。
因此在轻小型军用无人车的研制上,高速、高通过性,载荷、反制能力,是“砺剑”研究团队重点追求的目标。
遥控、通讯技术,是这类小型无人车的另一关键技术点。它要具备一定的抗干扰能力,这样才能适应有众多电磁污染的战场。但对于通讯距离、通视情况,记者和研究团队都认为没必要太远。隔着几道院墙、楼宇遥控无人车,实战中恐怕很难出现,因为后方的士兵们都会及时跟上,也不会让无人车独自跑那么远。更多情况,可能是士兵们隐蔽在一个拐角或山坡之后,不在敌人的直瞄范围内就行。
随着比赛结束,记者和朱老师、蔡老师,“砺剑”无人车研究团队的交流,也告一段落。通过这次比赛和交流,记者深感轻小型无人平台在未来战场,包括城市战、野战、反恐,侦察、战斗、排爆,等等各方面,都有非常重要的应用前景。
可以说:以后谁能把这支无人小尖兵之剑,砥砺得更加锋利,谁就将在战斗中占据重大优势。
宝剑锋从今磨砺,未来沙场赢先机!

猜你喜欢
专用汽车(2022年2期)2022-04-05
科学与生活(2021年24期)2021-12-06
科技视界(2019年19期)2019-08-29
科学与技术(2018年5期)2018-11-15
创新作文(1-2年级)(2017年11期)2018-04-17
科技视界(2017年6期)2017-07-01
科技与创新(2016年17期)2016-11-04
计算机辅助工程(2012年5期)2012-11-21
坦克装甲车辆(2000年6期)2000-06-13