
悬臂式3D打印机设计研究及在民航维修中的应用展望
2016-12-13 06:52邱基伦
装备制造技术 2016年10期
邱基伦
(中国东方航空股份有限公司,上海200335)
悬臂式3D打印机设计研究及在民航维修中的应用展望
邱基伦
(中国东方航空股份有限公司,上海200335)
通过对两类3D打印机运动模态和局限性分析,设计一款更适合民航维修的悬臂式3D打印机。悬臂式打印机具有工作高效、空间利用率高、无需依赖基床的特点。
3D打印;悬臂式;民航维修;运动模态
3D打印技术作为第三次工业革命的重要标志[1],已经在工业的各个领域展开了广泛的研究和应用。在航空制造领域,波音公司运用3D打印技术制造各种复杂的飞机零件,如冷空气导入电子设备的形状复杂导管;空客在A380客舱里使用3D打印机打印行李架;GE计划使用3D打印技术打印LEAP发动机组件[1]。在民航维修领域,东方航空首次使用3D打印技术打印飞机舱门手柄盖板、飞机座位指示牌等客舱部件配装B777-300ER型客机上,开启了3D打印技术在中国民航维修运用的时代。本文通过对两类3D打印机运动模态和局限性分析,设计一款更适合民航维修的悬臂式3D打印机。
1 3D打印技术在民航维修中的应用现状分析
目前,因受现有3D打印机运动形态限制,3D打印技术在民航维修中的应用仅局限于非在翼维修,即先在地面把零件打印好,然后再安装到飞机上。如要运用到在翼维修领域,现有的3D打印机运动形态需做进一步改进:基床的可选装性,实现无基床打印,在目标物体上直接打印成品;提高空间利用率,以适应在翼维修空间有限的特点;提高打印效率,以减少飞机停场时间。
2 3D打印机运动类型分析
3D打印技术是通过连续的物理层叠加,逐层增加材料来生成三维实体的技术[2]。除了打印头、耗材使用、成型方式不一样,各种打印方法所基于的3D运动平台都有类似之处,即通过打印头和基床的相对三维运动,实现物理层的层层叠加。常见的运动类型有:
2.1三维直线运动型
此类3D打印运动平台的特点是:基床一维直线往复运动(X轴);打印头在每一物理层做一维直线往复运动(Y轴);打印头的导轨在垂直方向上单向一维直线层级运动(Z轴),如图1所示,例如桌面级3D打印机RepRap系列的Prusa Mendel、Prusa I3等。

图1 基床往复运动型
或者基床在垂直方向上单向一维直线层级运动(Z轴);打印头沿导轨在横向做一维直线往复运动(Y轴);打印头的导轨沿纵向导轨在纵向做一维直线往复运动(X轴)(见图2),如Jenny Printer系列等。

图2 基床单向运动型
三维直线运动型打印机将电机的步进角度转化为三轴上的直线位移,优点是结构简单,三轴精度易于调节。但由于打印件安放在基床上,随基床一起运动,因此基床的响应速度和运动速度对打印件稳定性和精度存在限制,过大的速度会导致失步或打印件脱离基床,尤其是基床一维直线往复运动型,运动和震动幅度更大。因各维度上的运动都是直线运动,所以运动函数可用以下方程描述:

其中:f为单位运动距离所需的脉冲数;ρ为步进电机步进角;μ为电机驱动细分;n为传动比因子。
步进角ρ由电机型号确定;细分μ可在电机驱动板上调节;传动比因子n由传动机构的具体形态和尺寸参数确定,如同步轮、同步带、丝杆、传动齿轮等的尺寸参数。f越大,说明单位距离位移所需的脉冲数越多,打印速度就越慢;相反,f越小,打印速度越快。
由以上方程可知,打印精度受ρ、μ、n三个因素影响,而ρ和μ比较稳定,n精度易于调节,传动机构误差之间可以相互抵冲,所以整体打印精度较高。RepRap类打印空间利用率为50%;Jenny Printer打印空间利用率为100%.
2.2打印头三维非线性运动型
此类3D打印运动平台的特点是:基床不动,打印头在三维空间上非线性运动,通过将非线性运动投影到X-Y平面和Z轴上,实现层级叠加(如图3所示),例如Delta系列3D打印机。

图3 打印头三维非线性运动型
由于基床静止不动,打印件也保持静止,从而减少震动,提高打印件的稳定性,降低脱落风险,再加上打印头非线性自由运动,可用更快的响应速度和移动速度驱动打印头,实现更高的打印速度。以Delta结构的3D打印机为例,打印头移动到直角坐标点A(x,y,z)时,A点和打印机滑块的几何关系可用以下方程组描述:

其中:h1为滑块1#离基床的垂直高度;h2为滑块2#离基床的垂直高度;h3为滑块3#离基床的垂直高度;r为圆盘基床半径,坐标原点在基床圆心;L为连杆长度。
由方程组可知,滑块位置与打印头位置之间是非线性函数关系,除了三维直线运动型的电机传动误差,还有连杆机构的非线性误差,误差来源较多,而且误差之间无法抵冲,因此打印精度不易调节。打印机的可利用空间受到连杆限制,顶部的空间无法有效利用,无效体积为:

空间利用率为:

其中:H为机架立轴长度。
3 悬臂式3D打印机结构设计和原理分析
综合考虑3D打印机的精度调节、响应和移动速度、空间利用率、有无基床打印等因素,设计一款悬臂式结构打印机(如图4)。

图4 悬臂式结构
其结构特点为:基床静止不动(或无需基床);在每一层级,两悬臂做相对圆周运动,从而使打印头做非线性运动(x-y平面);垂直方向上做一维直线运动(z轴)。
各维度运动方程为:
3.1Z轴直线运动方程为:

3.2x-y平面上,直角坐标点A(x,y)与两悬臂的角坐标(α,β)关系为:
(1)当y值大于等于0.
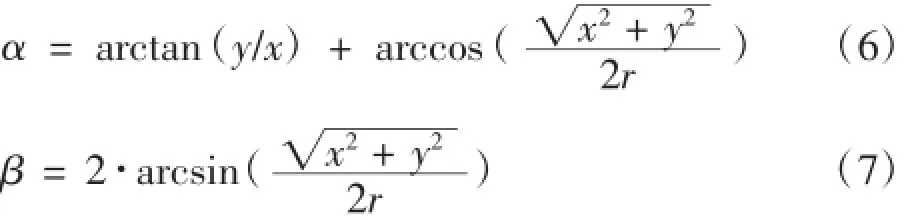
(2)当y值小于0.
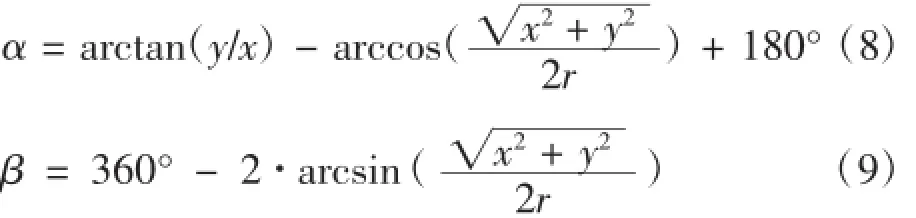
其中:r为两臂的长度;α为臂1#与x轴的夹角;β为臂2#与臂1#之间的夹角。
因旋转臂由电机轴旋转带动,所以悬臂每转动1单位距离弧长所需脉冲数如下:

由以上各方程可知,悬臂式结构3D打印机具有更高的响应速度和移动速度,且精度易于调节,空间利用率可达100%.因此,悬臂式3D打印机能以较小的体积和较高的速度、精度,打印出更大尺寸的打印件。
4 结论
悬臂式3D打印机除具备一般3D打印机功能外,还具有结构简单、改装方便的特点,而且可以摆脱基床的束缚,直接在工作对象上打印。如飞机机身表面喷漆、补漆,悬臂式打印机可以把机身作为基床,直接将设计图案打印在机身上,实现设计与施工无缝对接,并可以满足在无人环境下,以最小的原料消耗,最低的环境污染,打印出高质量的漆层。悬臂式3D打印机高效的空间利用率,更加适应民航维修活动空间狭小的特点,可针对相同的任务,设计出质量高、体积小、易于操作的打印机,为在局促的空间实现在翼修复创造可能性。同时,较高的打印速度,可以减少飞机停场时间。
[1]杨恩泉.3D打印技术对航空制造业发展的影响[J].航空科学技术,2013,(1):16-17
[2]王雪莹.3D打印技术与产业的发展及前景分析[J].中国高新技术企业,2012,(26):3-5.
The Design and Research of Cantilever 3D Printers and Application in Civil Aviation Maintenance
QIU Ji-lun
(China Eastern Airlines Co.,Shanghai 200335,China)
Based on the movement modal analysis of two types of 3D printers,design a new type of printers,cantilever 3D printers.Maybe it is more suitable for civil aviation maintenance.Cantilever printers have some characteristics:high work efficiency,high space utilization,without bed.
3D print;cantilever;aviation maintenance;movement mode
TP334.8
A
1672-545X(2016)10-0037-03
2016-07-30
邱基伦(1983-),男,广西人,学士学位,助理工程师,从事工程管理、航线维护、新技术开发应用等工作。
猜你喜欢
铁道建筑技术(2021年4期)2021-07-21
建材发展导向(2021年9期)2021-07-16
中国特种设备安全(2019年3期)2019-04-22
中国港湾建设(2017年11期)2017-12-19
中国港湾建设(2017年11期)2017-12-19
摄影之友(影像视觉)(2017年11期)2017-11-27
婚姻与家庭·性情读本(2017年1期)2017-02-16
山东工业技术(2016年15期)2016-12-01
凿岩机械气动工具(2016年2期)2016-11-11
中国塑料(2015年9期)2015-10-14
