
籽瓜捡拾脱籽联合作业机优化设计与试验
2016-12-02 06:26:33石鑫牛长河乔园园辛岩苏鲁坦巴达克王学农
新疆农业科学 2016年7期
石鑫,牛长河,乔园园,辛岩,苏鲁坦·巴达克,王学农
(1. 新疆农业科学院农业机械化研究所,乌鲁木齐 830091;2. 新疆塔城地区农机推广站,新疆塔城 834700)
籽瓜捡拾脱籽联合作业机优化设计与试验
石鑫1,牛长河1,乔园园1,辛岩2,苏鲁坦·巴达克2,王学农1
(1. 新疆农业科学院农业机械化研究所,乌鲁木齐 830091;2. 新疆塔城地区农机推广站,新疆塔城 834700)
【目的】通过设计、试验、优化,为籽瓜捡拾脱籽联合作业机提供适用、配套的去瓜秧装置,便于籽瓜机械化收获。【方法】选用成熟度较高的打瓜为试验材料,以籽瓜捡拾脱籽联合作业机为研究对象,优化设计旋转橡胶条式去瓜秧装置,并对该装置进行正交试验,确定最优参数组合,将最优参数组合带入打瓜实际收获作业中进行验证。【结果】捡拾辊行走速度为1.7 km/h,旋转轴转速为90 r/min,旋转轴旋向与捡拾辊前进方向相同时,瓜秧杂草量、籽瓜捡拾率和作业效率明显比其他参数组合下的作业效果好,收获打瓜时平均瓜秧杂草含量为0.576 kg/667m2,平均捡拾率96.16%,平均工作效率为0.407 hm2/h(6.11亩/h)。【结论】旋转橡胶条式去瓜秧装置,更有利于瓜秧和杂草的祛除,同时捡拾率和工作效率也达到了设计要求。
籽瓜;去瓜秧;优化;设计
0 引 言
【研究意义】以取籽为主的瓜类植物,包括打瓜、裸仁南瓜、黑壳南瓜、光板南瓜、红小片等[1],不论是种植面积还是产量,中国均居世界之首,盛产于我国西北地区,其中新疆、甘肃、内蒙古、宁夏、青海五省为主产区[2],2015年新疆以取籽为主的瓜类植物种植面积超过40×104hm2(600万亩),新疆是我国最大的籽瓜种植基地,已成为农民增收的特色经济作物之一。由于籽瓜收获期短,目前的籽瓜收获机具效率仍显低下,收获不及时易造成大量浪费,因此解决现有机具存在的问题,提高机具作业效率具有重要意义[3-5]。【前人研究进展】在已检索到的相关文献中,国外有关籽瓜类等作物的机械化收获技术的相关研究很少,近十几年没有相关文献和报道。1955年,由E.L.SCHEIDENHLEM 研制的南瓜和类似作物的收获机和 1969年 Wellington W. Porter 研制的南瓜收获机[6-14];国内由新疆农业科学院农业机械化研究所研制的“籽用瓜捡拾脱籽联合作业机”(ZL200720183527.8)已在我国主要籽瓜种植区大面积示范推广[15-16]。还有部分企业和个人研究了不同收获原理的籽瓜收获机,仅申报了专利或制作了样机,没有用于生产实际的相关报道。【本研究切入点】目前,在籽瓜的生产过程中,耕地、整地、播种、中耕、植保等机械化水平已较高,籽瓜的收获阶段,劳动强度大,劳动成本高,“籽用瓜捡拾脱籽联合作业机”采用扎瓜的原理,由捡拾辊将籽瓜扎起,升运至一定高度,再由取瓜齿将瓜取下,滚入脱籽装置内。但该机工作时,捡拾辊捡瓜时易将瓜秧、杂草等杂物带入脱籽装置内,难以清理,因此机具作业时,需要1~2名工人跟随辅助扯瓜秧,工作一段时间还需停机清理缠绕在旋转工作部件上的杂物,降低机具的工作效率。随着籽瓜的种植规模越来越大,人力投入,生产成本的消耗等问题日益突出,解决瓜秧杂草缠绕问题已成为提高籽瓜机械化收获效率的关键所在,因此急需设计、优化去除瓜秧、杂草的装置,以提高生产效率[15-19]。【拟解决的关键问题】测定旋转橡胶条式去瓜秧装置和籽瓜捡拾脱籽联合作业机,在不同工况下的作业效果,确定影响籽瓜捡拾率、瓜秧杂草量、作业效率的主次因素和最优参数组合,并将最优组合带入实际生产中,进行验证,指导籽瓜机械化生产。
1 材料与方法
1.1 材 料
1.1.1 籽瓜捡拾脱籽联合作业机
试验地在新疆玛纳斯县芳草湖农场,随机选择9个长100 m,宽2.8 m(约280 m2)的成熟打瓜地。试验样机安装并调试到正常工作状态,试验前校验仪器、仪表。保证试验期间工作稳定。试验选用打瓜皮由绿色转变为黄绿色,成熟度较高的打瓜。
籽瓜捡拾脱籽联合作业机由捡拾装置、去瓜秧装置、脱籽装置、机架、行走装置、瓜子输送装置、粮仓等几部分组成,其中捡拾装置由集拢器、捡拾辊、支撑圈、扎瓜齿、取瓜齿等组成,脱籽装置由进料斗、破碎轴、压瓜辊、筛选部件、螺旋输送部件、清选部件、传动系统等组成,机具由拖拉机牵引行驶,旋转所需的动力由拖拉机输出轴提供。图1
作业时,拖拉机牵引机具前进,捡拾装置在机具的带动下向前滚动,集拢器位于机具的前端,先将籽瓜集拢到捡拾辊的工作幅宽内,捡拾辊上布满扎瓜齿,随着捡拾辊的滚动,籽瓜连同瓜秧、杂草一起被扎瓜齿扎起,去瓜秧装置将瓜秧清除,剩余的籽瓜被升运至取瓜齿处,由取瓜齿取下后落至脱籽装置的进料口。脱籽装置的进料口下方设有破瓜轴将籽瓜打碎,压瓜辊将瓜子从瓜皮瓜瓤中分离出来并抛送至筛选部件,经筛分瓜子漏至螺旋输送部件,由螺旋输送端部的刮板抛送至清选部件内,通过清选部件将瓜子中的水分排出,较干净的瓜子由输送装置提升喂入瓜子仓内;去瓜秧装置可将瓜秧、杂草等杂物去除,避免缠绕在旋转部件上造成壅堵[20-21]。图2

1.捡拾装置;2.去瓜秧装置;3.机架;4.行走装置;5.脱籽装置

图2 籽瓜收获作业工作过程
1.1.2 去瓜秧装置的优化设计
1.1.2.1 优化设计
分析瓜秧杂草缠绕的部位和原因,破瓜部件的旋转轴最易缠绕瓜秧杂草,造成籽瓜入料口的壅堵,影响籽瓜进入脱籽装置,经常需停机清理,降低作业效率。先后设计压瓜辊式去瓜秧装置(图3)、割刀式去瓜秧装置(图4)和旋转橡胶条式去瓜秧装置(图5)。安装压瓜辊式去瓜秧装置的籽瓜捡拾脱籽联合作业机,作业时排出的瓜皮中含籽率过高,损失率达3.7%。安装割刀式去瓜秧装置的籽瓜捡拾脱籽联合作业机,割刀切割瓜秧时易将瓜割破,瓜子从瓜中漏出,造成浪费,且割刀磨损严重,工作一段时间后起不到切割瓜秧的作用。最终设计优化旋转橡胶条式去瓜秧装置,通过试验确定最佳工作参数[22-23]。图3~5
1.1.2.2 结构设计
旋转橡胶条式去瓜秧装置采用安装在旋转轴上的橡胶条将杂草和瓜秧拨离捡拾辊。去瓜秧装置包括旋转轴、带座轴承、橡胶条、支架等组成,每隔 7 cm处在旋转轴的外圆面上相对安装一对橡胶条,位置与扎瓜齿交错排列,旋转橡胶条与两齿之间时有一定的重合量,旋转轴通过带座轴承安装在捡拾辊前端的支架上,支架轴承座底板螺栓孔设计为长孔,可调节橡胶条与扎瓜齿相对位置;在传动轴带动下旋转轴转动带动橡胶条与捡拾辊做相对转动,捡拾辊带起的瓜秧和杂草被橡胶条拨下,达到去瓜秧和杂草的目的,橡胶条采用无毒耐磨材料。

1.侧板 2.防缠绕破瓜块 3.压瓜辊 4.心轴 5.机架 6.破瓜凹板

1.动刀片2.定刀片3.刀杆4.传动部件

图5 旋转橡胶条式去瓜秧装置结构
1.1.2.3 橡胶条的设计
橡胶条采用柔性材料,橡胶的种类很多:有天然橡胶、顺丁橡胶、丁苯橡胶等。其中,天然橡胶弹性大,耐磨性好,有非常好的机械性能,撕裂强度也较高,可达98 kN/m,具有耐磨性好、加工性好、耐水性优和耐冲击性好等优点[24-25]。因此旋转轴上固定的橡胶条选取天然橡胶,加工成宽度为30 mm,厚度为20 mm的橡胶条,长度选取300 mm,安装在旋转轴外圆柱面上。
该方法模仿人手扒瓜秧、杂草的方式,效果较好,能有效防止捡拾辊将瓜秧杂草带起喂入脱籽装置内,旋转轴转速过高,易将瓜打落,降低捡拾率,旋转速度过低,瓜秧无法清理干净;另外,转速与行走速度需要合理的匹配,行走过快,来不及清理瓜秧,也会造成部分瓜秧进入脱籽装置,行走速度慢,作业效率低,通过正交试验,得到机具的最佳工作参数。
1.2 方 法
针对旋转橡胶条式去瓜秧装置,为找出影响籽瓜捡拾率、瓜秧杂草量及作业效率的因素,选择捡拾辊行进速度、旋转轴转速、旋转轴旋向三因素作为研究对象,进行正交试验。捡拾辊行走速度分别取1.5、1.7和2 km/h;旋转轴转速分别取80、90和100 r/min;旋转轴旋向选择与捡拾辊前进方向相同和相反两种旋向。试验后统计脱籽装置入料口和旋转部件缠绕瓜秧杂草量(kg/667 m2),记为Y1,籽瓜捡拾率(%),记为Y2,作业效率(hm2/h),记为Y3。
选择捡拾辊行进速度、旋转轴转速、旋转轴旋向三因素作为研究对象,进行正交试验,确定机具最佳工作参数,列出因素水平[26-29]。表1

表1 因素水平
2 结果与分析
2.1 正交试验
由于C旋转轴旋向的第2个水平比第1个水平好,所以将第2个水平重复一次作为第3水平。 选用L9(34)试验。表2
一般线性模型: 脱籽装置入料口和旋转部件缠绕瓜秧杂草量Y1与 A捡拾辊行走速度, B旋转轴转速, C旋转轴旋向。
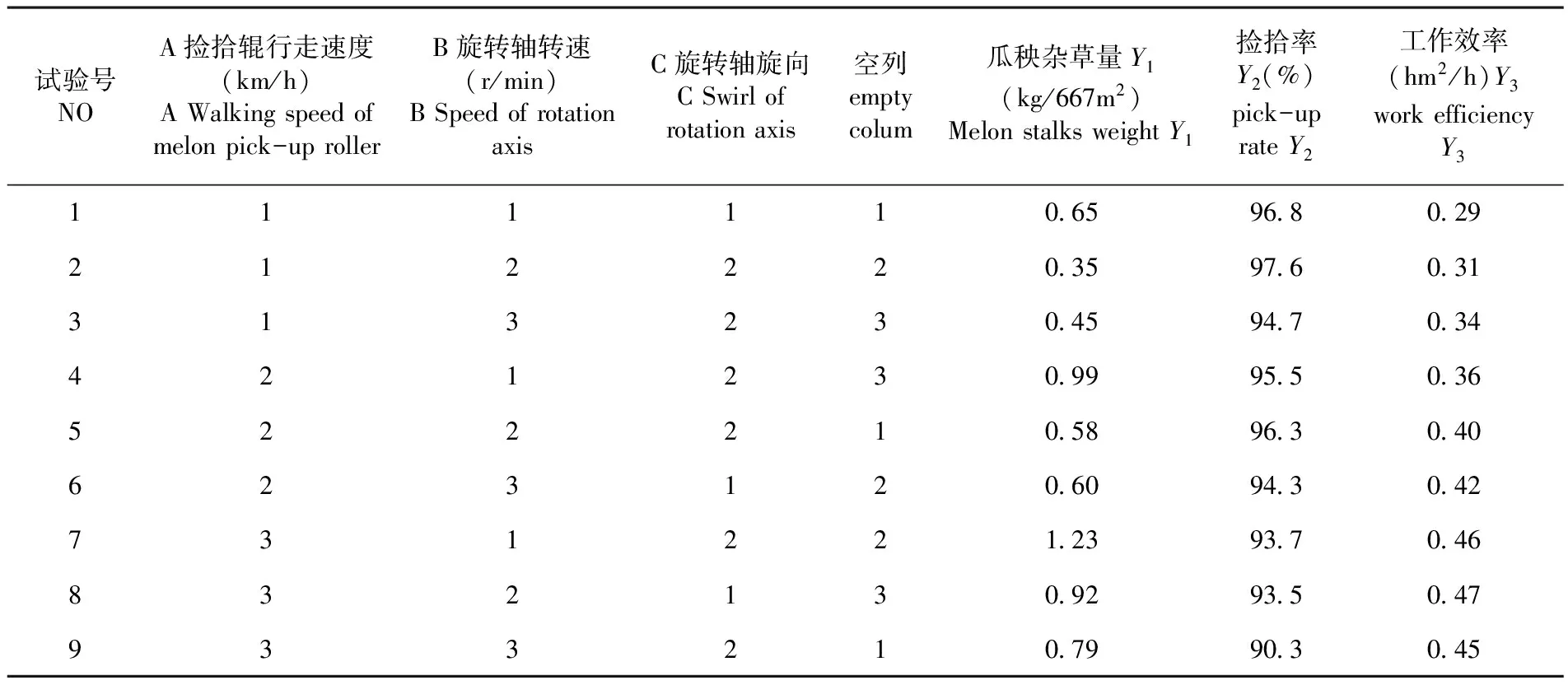
表2 正交试验与结果

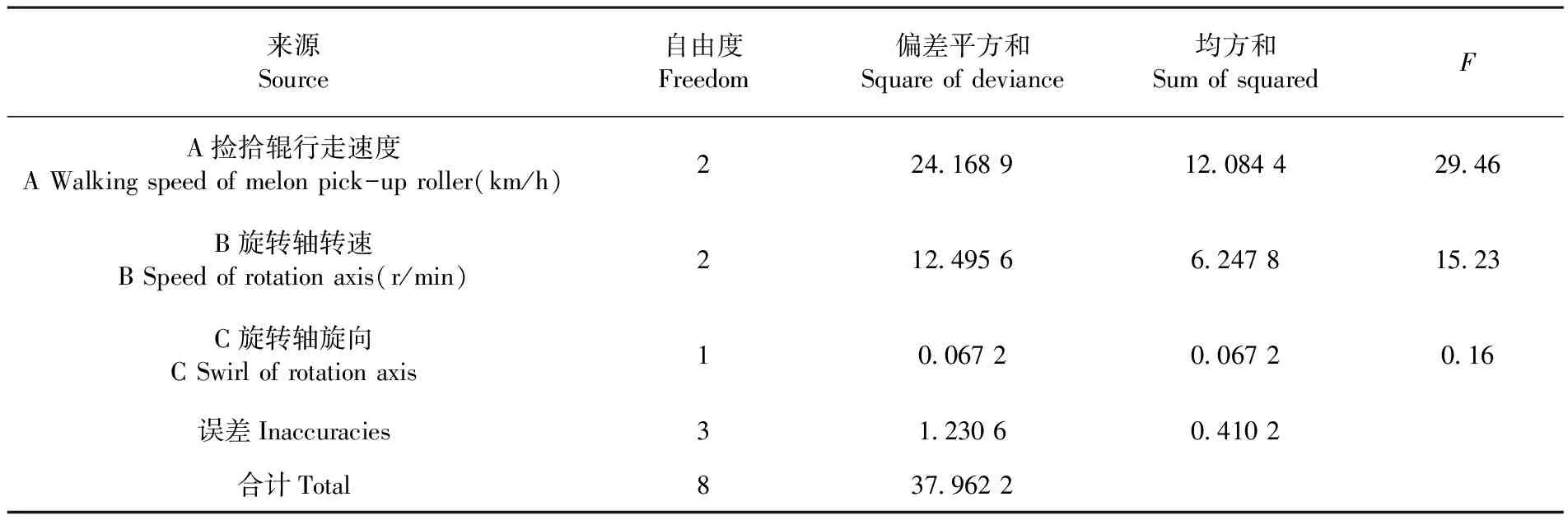
表3 瓜秧杂草量方差
F0.05(2,3)=9.55,F0.10(2,3)=5.46,
F0.05(1,3)=10.13,F0.10(1,3)=5.54.
由此看出,对于瓜秧杂草量由于FA、FB均>F0.05(2,3)=9.55,因此A、B在显著性水平0.05上极显著,C在显著性水平0.10上不显著,即捡拾辊行走速度、旋转轴转速对瓜秧杂草量影响极显著,旋转轴旋向对瓜秧杂草量影响不显著,所以得出影响瓜秧杂草量因素的主次顺序为FA>FB>FC。通过直观分析法对试验结果进行分析,得到各因素与考核指标的趋势图。因此,瓜秧杂草量的最优方案为A1B3C1。表3,图6
一般线性模型:捡拾率与A捡拾辊行走速度,B旋转轴转速,C旋转轴旋向。
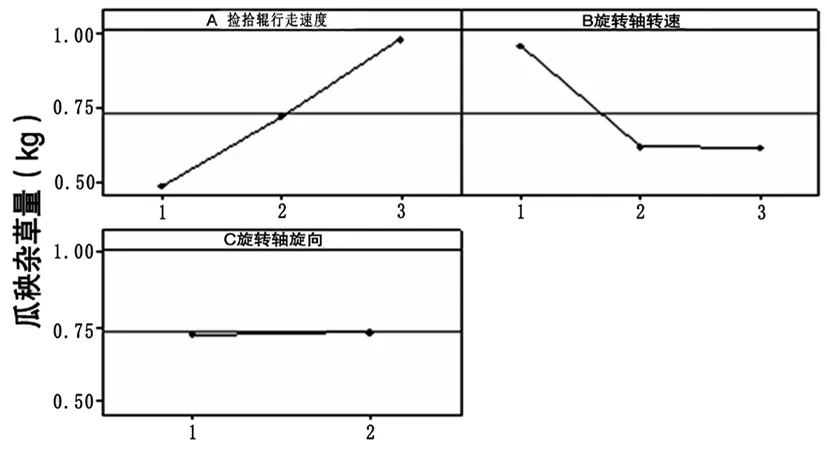
图6 各因素与考核指标瓜秧杂草量的趋势
来源Source自由度Freedom偏差平方和Squareofdeviance均方和SumofsquaredFA捡拾辊行走速度AWalkingspeedofmelonpick-uproller(km/h)22416891208442946B旋转轴转速BSpeedofrotationaxis(r/min)2124956624781523C旋转轴旋向CSwirlofrotationaxis10067200672016误差Inaccuracies31230604102合计Total8379622
2.2 捡拾率
F0.05(2,3)=9.55,F0.10(2,3)=5.46,
F0.05(1,3)=10.13,F0.10(1,3)=5.54.
由此看出,对于捡拾率由于FA、FB均>F0.05(2,3)=9.55,因此A、B在显著性水平0.05上极显著,C在显著性水平0.10上不显著,即捡拾辊行走速度、旋转轴转速对捡拾率影响极显著,旋转轴旋向对捡拾率影响不显著,得出影响瓜秧杂草量因素的主次顺序为FA>FB>FC。通过直观分析法对试验结果进行分析,得到各因素与考核指标的趋势图。因此,捡拾率的最优方案为A1B2C1。表4,图7
一般线性模型:工作效率与 A捡拾辊行走速度, B旋转轴转速, C旋转轴旋向。

图7 各因素与考核指标捡拾率的趋势
2.3 工作效率方差
F0.05(2,3)=9.55,F0.10(2,3)=5.46,
F0.05(1,3)=10.13,F0.10(1,3)=5.54.
由此看出,对于工作效率由于FA>F0.05(2,3)=9.55,因此A在显著性水平0.05上极显著,B、C在显著性水平0.10上不显著,即捡拾辊行走速度对工作效率影响极显著,旋转轴转速、旋转轴旋向对工作效率影响不显著,得出影响工作效率因素的主次顺序为FA>FB>FC。通过直观分析法对试验结果进行分析,得到各因素与考核指标的趋势图。因此,工作效率的最优方案为A3B3C2。表5,图8

表5 工作效率方差

图8 各因素与考核指标工作效率的趋势
通过对各因素考核指标的趋势图分析,采用综合平衡法得到较优组合方案为A2B2C2,即捡拾辊行走速度为1.7 km/h,旋转轴转速为90 r/min,旋转轴旋向与捡拾辊前进方向相同时作业效果最佳。
2.4 验证试验
选取最优参数组合:捡拾辊行走速度为1.7 km/h,旋转轴转速为90 r/min,旋转轴旋向与捡拾辊前进方向相同,代入打瓜实际收获中进行验证,按照每天工作10 h计算,统计瓜秧杂草量、籽瓜捡拾率和作业效率。表6
选用最优参数组合进行试验所得的瓜秧杂草量、籽瓜捡拾率和作业效率明显比其他参数组合下的作业效果好,打瓜收获日工作效率可达4.07 hm2。表6

表6 验证试验结果
3 讨 论
3.1 旋转橡胶条式去瓜秧杂草装置模仿人手扒瓜秧动作,能将瓜秧、杂草等杂物有效去除,且橡胶条为软材质不会破损籽瓜,大大降低了瓜秧杂草量、提高了籽瓜捡拾率和工作效率。
3.2 由于籽瓜品种及籽瓜不同成熟阶段的物理特性差异较大,因此收获作业时应综合分析籽瓜含水率、瓜皮硬度、瓜秧韧性等因素,以确定最佳收获时间。
3.3 由于不同品种籽瓜产量有较大差异,因此收获作业时应根据实际情况匹配机具前进速度,以达到最佳籽瓜捡拾率和最低的杂草量。例如籽用西葫芦产量高,瓜皮厚、硬度高、瓜瓤含水率低,破碎功耗大,因此作业效率较打瓜收获低,日作业效率为2.67 hm2。
4 结 论
4.1 旋转橡胶条装置能很好的解决瓜秧杂草缠绕、堵塞问题,改进后的籽瓜捡拾脱籽联合作业机旋转部件由于没有瓜秧杂草的缠绕,较以往的籽瓜捡拾脱籽联合作业机减少了停机次数,以往的籽瓜捡拾脱籽联合作业机,工作1~1.5小时需停机清理,而改进后的机具可连续作业,日工作效率达4.07 hm2;
4.2 通过优化设计了旋转橡胶条式去瓜秧杂草装置,并对其进行了正交试验,得出最优组合参数,当捡拾辊行走速度为1.7 km/h,旋转轴转速为90 r/min,旋转轴旋向与捡拾辊前进方向相同时作业效果最佳,平均籽瓜捡拾率达96.16%,收获后的籽瓜中瓜秧杂草含量最少为0.576 kg/667m2,作业效率达0.407 hm2/h;
4.3 将最优组合参数带入实际籽瓜收获中验证其作业效果,通过连续10小时作业证实,机具的收获指标满足设计要求。
References)
[1] 柳唐镜,汪李平. 籽瓜(籽用西瓜)产业前景展望[J].北京农业,2007,(11):13-15.
LIU Tang-jing, WANG Li-ping. (2007). Prospects for industrialization of seed-using melon [J].BeijingAgriculture, (11):13-15.(in Chinese)
[2] 何金明.内蒙古籽用西瓜生长发育规律的研究[D].呼和浩特:内蒙古农业大学硕士论文,2006:55-57.
HE Jin-min.(2006).Researchonlawsorgrowthanddevelopmentofseed-usingmeloninInnerMongolia[D]. Master Dissertation. Inner Mongolia Agricultural University, Hohhot:55-57. (in Chinese)
[3] 李景彬,王曌鹏, 田绪顺,等. 打瓜机械化收获技术研究现状及发展对策[J].作物杂志,2011,(1):126-128.
LI Jing-bing, WANG Zhao-peng, TIAN Xu-shun, et al. (2011). The Current Status of Mechanized Harvest Technologies for Watermelon and Its Development Strategy [J].Crops, (1):126-128. (in Chinese)
[4] 王亚鸽,王维新. 兵团籽瓜机械化收获技术现状分析[J]. 新疆农机化,2011,(3):33-35,57.
WANG Ya-ge, WANG Wei-xin.(2011). Analysis on the present situation of mechanized harvesting technology of the seed-using melon of the Corps [J].XinjiangAgriculturalMechanization,(3):33-35,57.(in Chinese)
[5] 刘双玲,杨东明,高士其,等. 打瓜机械化收获技术在阿勒泰地区的引进示范[J]. 新疆农机化,2008,(6):38-39.
LIU Shuang-lin, YANG Dong-min, GAO Shi-ji, et al. (2008). The introduction and demonstration of seed-using melon harvest mechanization technology in Aletai area [J].XinjiangAgriculturalMechanization,(6):38-39.(in Chinese)
[6] E.L.SCHEIDENHLEM.(1955).Harvesterofpumpkinandsimilarcrops[P]. The United States Patent.
[7] Wellington W. Porter.(1969).Pumpkin harvester. The United States Patent.
[8] Kocabi yi k, H., Kayi soglu, B., & Tezer, D. (2009). Effect of moisture content on thermal properties of pumpkin seed.InternationalJournalofFoodProperties, 12(2):277-285.
[9] Emadi, B., Abbaspour-Fard, M. H., & Yarlagadda, P. K. D. V. (2009). Mechanical properties of melon measured by compression, shear, and cutting modes.InternationalJournalofFoodProperties, 12(4):780-790.
[10] Emadi, B.; Kosse, V.; Yarlagadda, K.O.V. (2005). Mechanical properties of pumpkin.InternationalJournalofFoodProperties, 8 (2):277-287.
[11] Diezma Iglesias, B., Ruiz-Altisent, M., & Jancsók, P. (2005). Vibrational analysis of seedless watermelons: use in the detection of internal hollows.SpanishJournalofAgriculturalResearch, 3(1):52-60.
[12] Sadrnia, H., Rajabipour, A., & Jafari, A. (2008). Internal bruising prediction in watermelon compression using nonlinear models.JournalofFoodEngineering, 86(2):272-280.
[13] Ferrari, C. C., & Hubinger, M. D. (2008). Evaluation of the mechanical properties and diffusion coefficients of osmodehydrated melon cubes.InternationalJournalofFoodScience&Technology, 43(11):2,065-2,074.
[14] Bagher Emadi. (2005). Mechanical of pumpkin [J].InternationalofFoodProperties,8:277-287.
[15] CN2691233Y,联合打瓜收获脱籽机[P].
CN2691233Y.Seed-usingmelonhavestinganddeseedingmachine[P]. (in Chinese)
[16] CN2802936Y,改进的联合打瓜收获脱籽机[P].
CN2802936Y.AkindofmodifiedSeed-usingmelonhavestinganddeseedingmachine[P]. (in Chinese)
[17] CN2857445Y,联合打瓜脱籽机[P].
CN2857445Y.Seed-usingmelondeseedingmachine[P]. (in Chinese)
[18]CN200720183527.8,籽用瓜捡拾脱籽联合作业机[P].
CN200720183527.8.Seed-usingmelonpickinganddeseedingmachine[P]. (in Chinese)
[19] 王学农,牛长河,陈发,等.新型籽瓜捡拾脱籽联合作业机研制[J].新疆农机化,2008,(3):25-26.
WANG Xue-nong, NIU Chang-he, CHEN Fa, et al.(2008). Research on seed-using melon picking and deseeding machine [J].XinjiangAgriculturalMechanization,(3):25-26.(in Chinese)
[20]牛长河,辛岩,苏鲁坦·巴达克,等. 4ZGJT-110型籽瓜捡拾脱籽联合作业机的改进设计[J]. 新疆农机化,2014,(5):7-9.
NIU Chang-he, XIN Yan, Sulutan Batake et al. (2014).Optimal design of ZGJT-110 seed-melon picking up-seed removing combine [J].XinjiangAgriculturalMechanization,(5):7-9.(in Chinese)
[21] 王学农,牛长河,陈发. 基于虚拟样机的打瓜捡拾脱籽联合收获机设计[J]. 农机化研究,2010,(12):88-91.
WANG Xue-nong, NIU Chang-he, CHEN Fa. (2010). Study on Seed-using melon Picking and Threshing Harvester Based on Virtual Prototyping [J].JournalofAgriculturalMechanizationResearch,(12):88-91.(in Chinese)
[22]ZL201520327086.9, 一种防缠绕籽瓜破碎装置[P].
ZL201520327086.9.AkindofpreventingwindingofSeed-usingmelonbrokendevice[P]. (in Chinese)
[23] 王庆惠,王学农,牛长河. 打瓜捡拾脱籽机捡拾辊的结构设计[J]. 农机化研究,2012,(7):118-121.
WANG Qing-hui, WANG Xue-nong, NIU Chang-he. (2012). Construction design on picking roller of seed-watermelon picking and threshing harvester [J].JournalofAgriculturalMechanizationResearch,(7):118-121.(in Chinese)
[24] 周祖锷.农业物料学[M].北京:农业出版社,1994:40-50.
ZHOU Zu-e. (1994).AgriculturalMaterialScience[M]. Beijing: China Agriculture Press:40-50. (in Chinese)
[25] 沈再春.农产品加工机械与设备[M]. 北京:中国农业出版社,2001:7-8.
SHEN Zai-chun. (2001).Agriculturalproductsprocessingmachineryandequipment[M]. Beijing: China Agriculture Press,:7-8. (in Chinese)
[26] 赵作善.试验设计[M].第2版. 北京:中国农业大学出版社,1998.
ZHAO Zuo-shan. (1998).Experimentaldesign[M]. 2nd Ed. Beijing: China Agricultural University Press. (in Chinese)
[27] 茆诗松.试验设计[M].北京:中国统计出版社,2004,(7):412-413.
MAO Shi-song, et al. (2004).Experimentaldesign[M]. Beijing: China Statistics Pres:412-413. (in Chinese)
[28] 任露泉.试验优化技术[M]. 北京:机械工业出版社,1986.
REN Lu-quan. (1986).ExperimentalOptimizationTechnique[M]. Beijing:Machinery Industry Press. (in Chinese)
[29] 孙晓靖. 苦荞麦剥壳工艺及剥壳部件的试验研究[D]. 呼和浩特: 内蒙古农业大学硕士毕业论文,2007.
SUN Xiao-jing. (2007).Experimentalresearchonshelltechnologyandshellcomponentofbitterbuckwheat[D]. Master Dissertation. Inner Mongolia Agricultural University, Hohhot. (in Chinese)
Fund project:National agricultural science and technology achievement transformation project "The production of watermelon harvest mechanization technology of seed-using melon pilot and demonstration" (2012GB2G400502); the Youth Funds of Xinjiang Academy of Agricultural Sciences "Study on the mechanism and key technology of seed-using melon fragmentation and seed taking" (xjnkq-2013014)
Optimization and Test of Melon Stalks Removing Device on Seed-using Melon Picking and Deseeding Machine
SHI Xin1, NIU Chang-he1, QIAO Yuan-yuan1, XIN Yan2, Sulutan Bardac2, WANG Xue-nong1
(1.Research Institute of Agricultural Mechanization, Xinjiang Academy of Agricultural Sciences, Urumqi 830091,China;2.TachengAreaAgriculturalMachineryExtensionStation,TachengXinjiang834700,China)
【Objective】 To provide applicable and matching melon stalks removing device for seed-using melon picking and deseeding machine through design, test and optimization to simplify the mechanized harvesting of seed-using melon.【Method】Taking seed-using melon picking and deseeding machine as research subject, through analyzing the existing problems in harvest and structure of equipment, to optimize and design the rotating rubber type melon stalks removing device and do orthogonal test on it, and through the orthogonal test, the project team found out the best combined parameters and verified these parameters through actual operation of harvest on seed-using melon.【Result】The result of experimental data indicates that under the condition of walking speed of melon pick-up roller is 1.7 km/h, speed of rotation axis is 90 r/min and swirl of rotation axis is same with direction of melon pick-up roller, the content of weeds and melon stalk, the picking up rate and the operation efficiency is better than other parameter combination. When picking seed-using melon the average content of weeds and melon stalk was 0.576 kg/ 667 m2, the average picking rate was 96.16%, the operation efficiency was 0.407 hm2/h (6.11 mu/h). 【Conclusion】Through a comprehensive analysis, we found that the rotating rubber type melon stalks removing device had better performance in melon stalk and weed removing and the picking up rate and operation efficiency both met the design requirement.
seed-using melon; melon stalks removing; optimization; design
10.6048/j.issn.1001-4330.2016.07.019
2016-01-21
国家农业科技成果转化项目“打瓜生产联合收获机械化技术的中试与示范”(2012GB2G400502);新疆农业科学院优秀青年科技人才基金项目“籽瓜破碎、取籽机理及关键技术的研究”(xjnkq-2013014)
石鑫(1982-),女,新疆克州人,助理研究员,硕士,研究方向为特色经济作物采收技术与装备,(E-mail)18999111523@163.com
王学农(1964-),男,陕西汉中人,研究员,硕士生导师,研究方向为农业机械化技术装备,(E-mail)xjwxn2010@sina.com
S225
A
1001-4330(2016)07-1310-09
猜你喜欢
——兰州籽瓜
西北园艺(综合)(2023年1期)2023-03-23 07:28:22
学生天地·小学低年级版(2019年10期)2019-12-30 01:50:33
家教世界·创新阅读(2019年11期)2019-12-10 09:22:04
学生天地(2019年28期)2019-08-25 08:50:46
作文与考试·小学低年级版(2019年7期)2019-04-17 18:53:10
农机化研究(2017年2期)2017-12-16 07:01:39
现代农业研究(2017年2期)2017-04-01 23:34:25
农民致富之友·下半月(2015年6期)2015-07-09 10:46:48
农民致富之友(2015年12期)2015-06-11 00:03:34
中国果菜(2015年2期)2015-03-11 20:01:04
