
基于高精度景象匹配的SAR平台定位方法*
2016-11-28 01:17陈圣义刘晓春滕锡超李晓雪雷志辉
国防科技大学学报 2016年5期
陈圣义,刘晓春,滕锡超,李晓雪,雷志辉
(1.国防科技大学 航天科学与工程学院, 湖南 长沙 410073;2.国防科技大学 图像测量与视觉导航湖南省重点实验室, 湖南 长沙 410073)
基于高精度景象匹配的SAR平台定位方法*
陈圣义1, 2,刘晓春1, 2,滕锡超1, 2,李晓雪1, 2,雷志辉1, 2
(1.国防科技大学 航天科学与工程学院, 湖南 长沙 410073;2.国防科技大学 图像测量与视觉导航湖南省重点实验室, 湖南 长沙 410073)
提出一种利用SAR图像与光学基准图高精度匹配实现SAR平台定位的方法。利用成像中间时刻SAR平台与SAR图像中心线上物点在水平面的投影共线的特性,在图像中心线上均匀选取若干点作为匹配点,并与光学基准图进行高精度景象匹配获取它们的物点坐标;根据这些物点坐标估计出图像中心线在当地水平面投影的直线方程;利用直线信息和斜距高度信息计算SAR平台在水平面上的投影点位置,进而计算得到成像中间时刻SAR平台的空间位置。为了进一步提高匹配精度,分别提出对正侧视和斜视SAR图像匹配区域进行几何粗校正的方法。还分析了不同误差因素对平台定位精度的影响,并给出精度估计公式。仿真和实际图像实验结果表明,方法正确可行,具有较高的定位精度,具备工程实用价值。
合成孔径雷达;平台定位;景象匹配;直线拟合;误差传递
合成孔径雷达(Synthetic Aperture Radar,SAR)具有全天时、全天候成像的优点,并且对目标区域成像精度较高,特别适用于景象匹配等视觉导航系统[1-2]。不同于一般的光学传感器成像方式,SAR依靠于运动成像,这样一种成像特点使得SAR平台定位问题具有一定的特殊性。
李亚超等[3]提出在SAR正侧视成像条件下,利用某方位门上的两个高精度匹配点作为控制点来解算SAR平台位置。这种方法原理简单,同时计算量较小,但是对匹配精度要求较高,并且容易在SAR飞行方向(方位向)产生比较大的误差。秦玉亮等[4]提出了一种融合多传感器信息的方法,结合使用惯导输出的速度、高度计的测高数据以及距离多普勒数据来计算SAR平台的空间位置,但其定位精度容易受速度数据和高度数据的误差影响。文献[5]采用多项式参数来描述SAR平台运动轨迹,使用若干控制点来建立观测方程组,最后利用最小二乘方法来估计这些参数。与该方法类似,程华等[6]提出在正侧视条件下使用支持向量机来估计SAR平台的运动方程。这类方法能够有效利用所有控制点的信息,但是参数化的运动方程往往只能在短时间内符合实际情况,并且运动参数的估计精度依赖于运动过程中采样时刻的SAR平台定位精度。
1 SAR平台定位方法
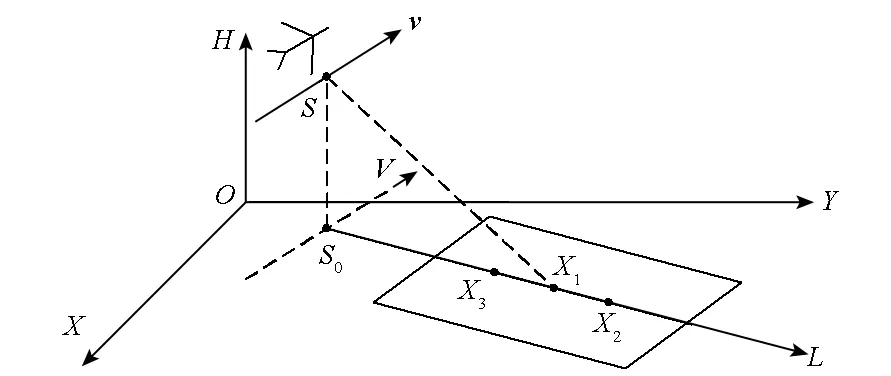
图1 SAR成像几何关系Fig.1 Geometric relation of SAR imaging
1.1 景象匹配确定图像点地面位置
定位过程中,先在SAR图像的中心线上均匀地选取若干点,并通过景象匹配的方法来确定这些点在XOY平面上的位置。由于目前主要使用光学基准图来进行景象匹配,因此,这两类异源图像的高精度匹配是实现高精度SAR平台定位的基础。
由于成像原理的巨大差异,SAR图像和光学基准图在灰度域上一般不存在严格的对应关系。为了消除这两类图像间灰度和纹理差异的影响,可以同时对二者在灰度域进行变换,并抽取两者之间稳定的物理结构信息。本文使用了一种基于局部频率信息的异源图像匹配方法[7-8],首先将图像由灰度域变换到频率域,利用局部频率信息来构造适于异源匹配的光照不变图像表达,并提取图像间公共、稳定的物理结构信息,进而实现异源图像间的高精度匹配。
另外,SAR图像上的景物位置与其斜距相对应,因此与地面实际场景还存在一定差异。为了进一步提高景象匹配的精度,可以利用已知的SAR成像信息对匹配区域的图像进行几何粗校正,使其与光学基准图基本一致。
1.1.1 正侧视SAR图像粗校正
SAR图像距离向上斜距与地面实际距离不一致,并且比例尺不是常数。如图2所示,不考虑地面起伏,h为SAR平台高度;用X表示波束中心上任意点,并且有0<θ<π/2,并用D表示X的像在斜平面上的位置,可用D和L分别表示该点的斜距和在地面上相对于点S0的距离,则有:
L=Dsinθ
(1)
式(1)两端微分得:
ΔL=ΔDsinθ
(2)
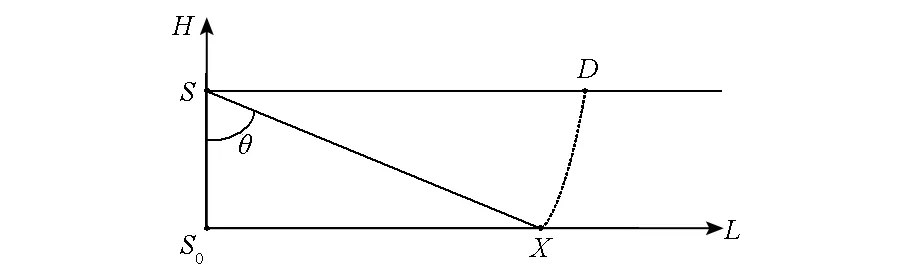
图2 斜距与地距的关系示意图Fig.2 Sketch of slant range and ground range
用K表示SAR图像相对于实际地距的比例尺,即有:
(3)
从式(3)可以看出,比例尺是俯角θ的函数,而不是常数,并且随着θ增大而减小。越接近点S0的地方,比例尺越大,成像得到的地面场景压缩程度越大,表现为SAR成像中的近距离压缩现象。这样一种变比例尺的图像不利于景象匹配,可以在景象匹配之前根据已知的SAR平台高度,估计出匹配区域内图像上各点对应的俯角θ,并根据式(3)在图像的距离向上进行拉伸修正,使得匹配区域内图像比例尺基本一致,以提高景象匹配精度。
1.1.2 斜视SAR图像粗校正
在非正侧视条件下,在同一距离门上的点依然可以用来进行SAR平台定位,SAR平台依然位于这些点所在的直线上。但是在这种条件得到的SAR图像相对地面实际景象会有较大的剪切形变,不利于景象匹配,因而需要根据已知的成像角度对SAR图像进行几何粗校正。
如图3所示,SAR平台沿X轴以速度V飞行,在地面XOY上有个矩形abcd,矩形高为L。当以正侧视进行SAR成像时,即α=π/2时,可以得到如图3(b)所示的矩形图像;若以前斜视成像方法进行成像,即α<π/2,则如图3(a)所示,最先被雷达波束扫描到的是d点,接下来依次为a,c和b点,因而在等效平面上得到的图像如图3(c)所示。
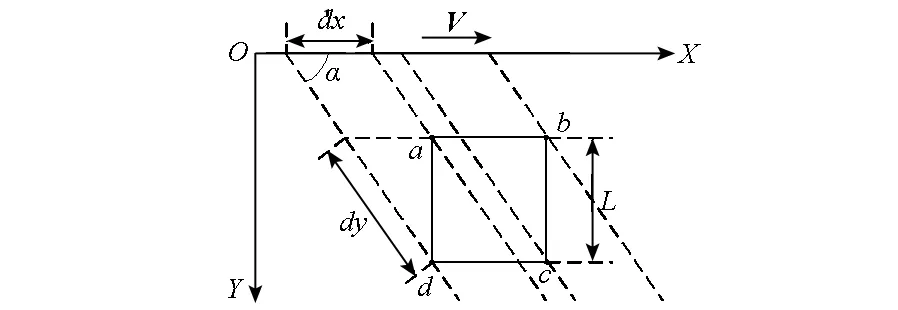
(a) 前斜视成像几何关系(a) Imaging geometry of squint mode
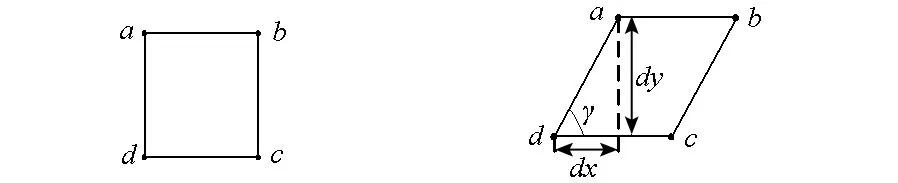
(b) 正侧视成像结果(b) Side-looking image (c) 前斜视成像结果(c) Squint image图3 正侧视成像与非正侧视成像结果对比Fig.3 Result contrast between side-looking and squint imaging mode
由图3(a)中几何关系可知,dx=Lcotα,dy=L/sinα,则tanγ=dy/dx=secα。将斜视图像校正到正侧视图像,需要先消除斜视角造成的横向剪切形变,再消除纵向的拉伸,可以通过如式(4)所示变换完成:
(4)
式中,(x,y)为斜视图像上的像素坐标,(x′,y′)为该点在校正后图像上的坐标,由上述几何关系可知,cotγ=cosα,拉伸因子s=sinα。
需要指出的是,严格意义上的SAR图像几何校正模型[9]非常复杂,本文仅单纯地从几何关系出发,利用成像高度和斜视角对SAR图像进行粗略校正。通过这样的粗校正可以使SAR图像匹配区域与光学基准图的景象特征结构基本一致,从而可以较大地提高景象匹配速度和精度。
1.2 SAR平台位置确定
SAR图像中心线投影在当地水平面内也是一条直线,并且,成像中心时刻SAR平台空间位置在水平面上的投影也在这条直线上。通过上述景象匹配方法确定中心线上若干点所对应的地面坐标后,就可以利用它们估计出水平面上投影直线的方程。最后利用成像时的高度数据以及各点的斜距就能够估计出SAR平台的空间位置。
1.2.1 计算图像中心线在地面投影直线方程

(5)
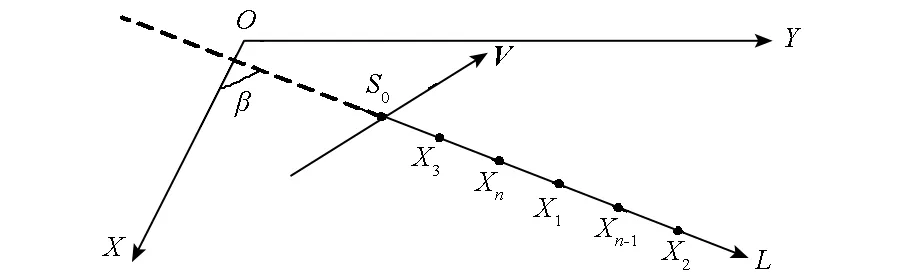
图4 控制点拟合投影直线Fig.4 Fitting the projection line with control points
1.2.2 确定SAR平台空间位置

(6)
2 误差分析
本文SAR平台定位方法主要包含两部分:通过匹配点确定图像中心线在水平面的投影以及根据斜距确定SAR平台的位置。第一步估计中心线投影时,会引入面内直线的斜率误差,也就是直线倾角误差,这个误差会在垂直于距离向的方向上(正侧视成像时就是方位向)被SAR成像距离放大,带来一定的定位误差;第二步确定SAR平台位置时,受斜距测量误差以及各匹配点高程误差等影响,会在距离向上引入一定的定位误差。正侧视成像时,方位向垂直于距离向,因而上述两种误差可以分别在这两个方向上进行分析;而斜视成像时,由于方位向不再垂直于距离向,因而第一种误差不在方位向上,而是在垂直于距离向的方向上。下面在正侧视条件下对这两种误差进行分析。
2.1 方位向误差分析
首先分析地面点匹配误差对确定图像中心线在地面投影方向精度的影响。如图4所示,SAR图像中心线的地面投影方向就是直线S0L与OX轴的夹角β,可以在XOY平面上通过直线上的n个点来确定。这些点在XOY平面上的位置通过景象匹配来确定,且地面点的匹配精度直接决定了中心线的定向精度。
在实际匹配过程中是在波束中心线上均匀选取的图像点与基准图进行匹配,这里讨论使用n个均匀分布的点来拟合直线时,直线在平面中倾角β的精度σβ与点定位精度σk的关系。在平面中,直线方位角β与斜率k的关系为β=arctank,由误差传递关系可知:
σβ=σk/(1+k2)
(7)
在使用多点拟合直线时可以先使用坐标旋转使得直线与坐标系横轴基本平行,这样并不会影响直线拟合精度,这时有k≈0,可以认为:
σβ=σk
(8)
并且此时影响直线定向精度的是各点在纵轴方向的精度。假设这n个点的相邻间距为ΔL,通过坐标平移使得第一点的横坐标为x1=0,第i个点的横坐标近似为xi=(i-1)ΔL,同时各点的纵坐标为yi。设各点分布在直线y=kx+b上,则由这些点可组成方程组:
AX=Y
(9)
(10)
直线的定向精度为:
(11)
上述直线的定向误差被SAR成像距离放大后,会在方位向上对SAR平台定位带来误差:
(12)
2.2 距离向误差分析

(13)
假设各点匹配精度均为σLi0=σX,各点高程精度为σh,SAR成像时斜距精度为σD,根据误差传递公式可知,SAR平台定位在距离向上的精度为:
(14)
整理得:
(15)
3 实验结果
使用仿真数据对所提出的SAR平台定位方法进行精度验证,并使用实际挂飞获得的SAR图像进行实验验证。
3.1 仿真数据实验
在仿真实验中,假定SAR平台高度hS=7000 m,点S0到图像中心的距离L0=20 000 m。在水平面上均匀取n=12个控制点,相邻点之间的距离ΔL=700 m,假设它们的位置已经由景象匹配获得,匹配精度为σX,且各点高程满足均值为0、标准差为σh的高斯分布,解算过程中各匹配点高程均取为0 m。各匹配点的斜距Di通过使用SAR平台与各点位置的真值计算获得,并添加均值为0、标准差为σD的高斯噪声。
本文进行了3组不同实验,分别研究了匹配误差、地面点高程误差以及斜距测量误差对SAR平台定位精度的影响。具体配置如下:
1)σh=5 m,σD=1 m,匹配精度σX从0到15 m变化;
2)σX=5 m,σD=1 m,地面点高程精度σh从0到15 m变化;
3)σX=5 m,σh=5 m,斜距测量精度σD从0到15 m变化。
在不同误差条件下分别进行了500次独立实验,分别统计了方位向和距离向SAR平台定位的均方根误差作为各误差条件下的定位精度,并与根据式(12)和式(15)算得的理论精度进行了对比。具体结果如图5所示。
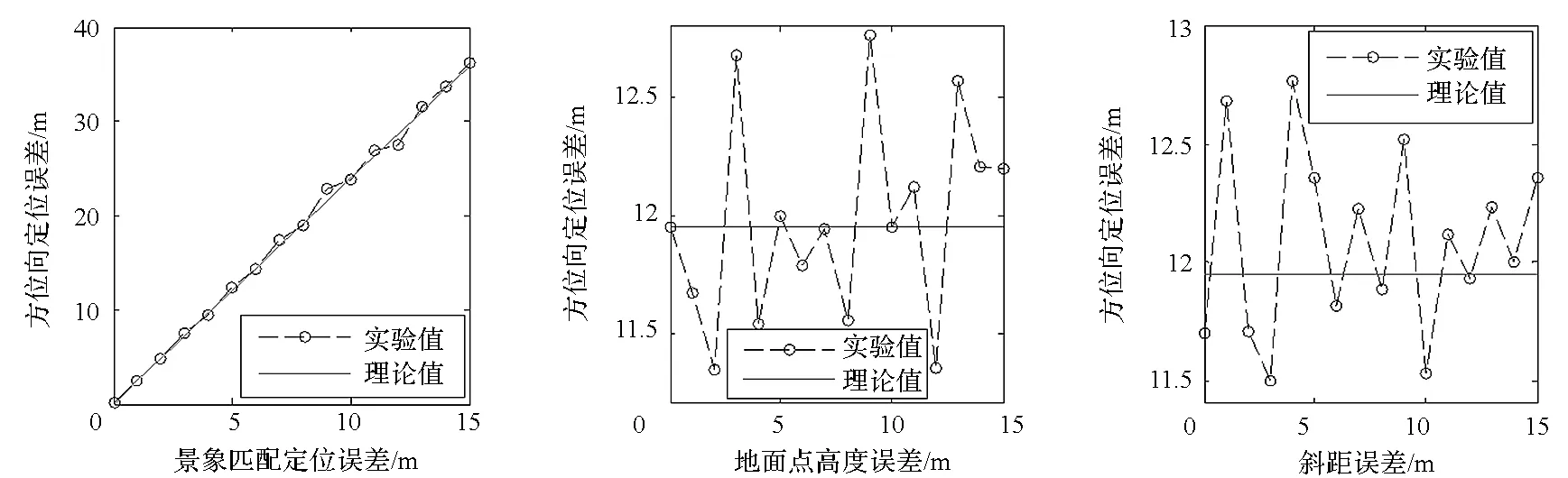
(a) σh=5 m, σD=1 m (b) σX=5 m, σD=1 m (c) σX=5 m, σh=5 m
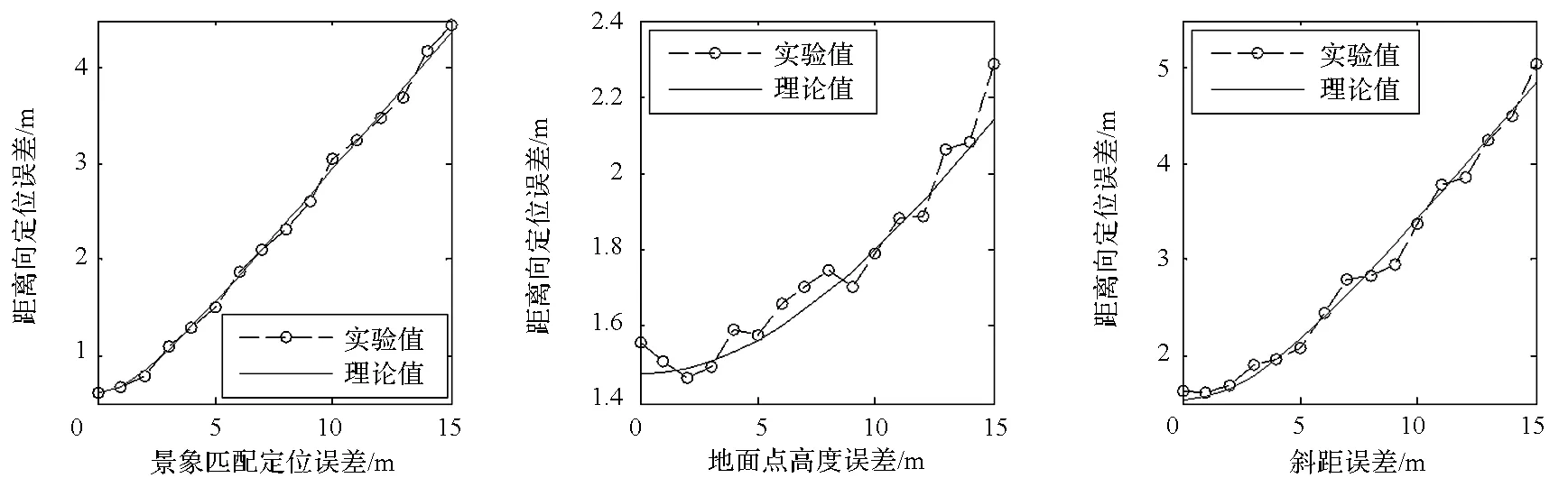
(d) σh=5 m, σD=1 m (e) σX=5 m, σD=1 m (f) σX=5 m, σh=5 m图5 定位精度仿真实验结果Fig.5 Experimental results of synthetic data
从实验结果可以看出,各误差条件下的SAR平台定位精度与理论值基本一致。使用该方法进行SAR平台定位,在距离向上精度都能优于5 m,而在方位向上精度受匹配误差影响较大,这主要是由直线的定向误差被成像距离放大所致,在景象匹配精度达到5 m时,方位向的定位精度达到12 m,这在工程实际中是可以接受的。
3.2 实际图像实验
使用实际挂飞得到的正侧视SAR图像进行了实验验证。如图6所示,左半部分是所使用的SAR图像,右半部分为光学基准图。匹配过程中在SAR图像的中心线上均匀地选取了13个点,其中第7个点就是图像中心点,白色十字丝表示了匹配结果。实验所使用的光学基准图是从Google Map下载的,并进行了经纬度校正[10],精度可以达到10 m以内,图像分辨率为1 m/Pixel,因而匹配精度可以达到10 m。根据精度公式以及成像参数可以计算得到这种条件下方位向定位精度为63.5 m,距离向定位精度为4.0 m。
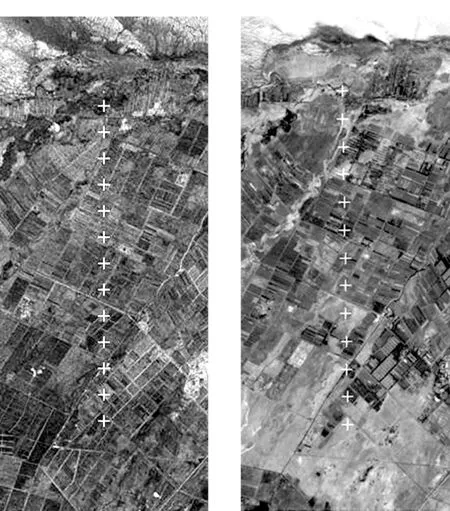
图6 SAR图像(左图)与光学基准图(右图)匹配结果Fig.6 Matching result of SAR image (the left) and optical reference image (the right)
实验中选取了SAR图像序列中的5幅图像进行景象匹配和SAR平台定位,并与飞行时GPS数据进行对比得到定位误差,结果如表1所示,均与理论值一致。需要指出的是,文中使用一倍标准差(1σ)来表示理论精度,实际中误差达到3σ是正常的,因此表1中图像5的距离向误差略大于理论值也是可以接受的。实验中方位向的定位误差较大,这主要是由于匹配误差较大造成的,实际中若使用精度更高的专用卫片,匹配精度可以到5 m甚至更高,方位向的定位精度可以得到显著提高。
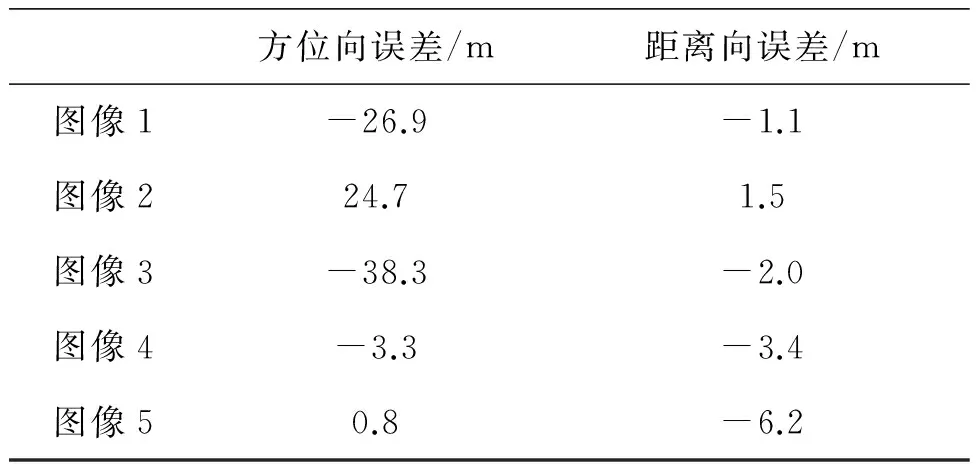
表1 定位误差
4 结论
利用高精度景象匹配实现了SAR平台定位,并分别给出了正侧视和斜视成像的匹配区域几何粗校正方法,使得该定位方法在两种成像条件下都能适用。文中还分析了各种误差因素对定位精度的影响,并通过仿真数据实验验证了精度分析结果,同时结果也表明本文方法可以得到较高的定位精度。最后利用实际挂飞SAR图像与光学基准图进行匹配并解算平台位置,定位结果表明本文方法可以实现较高精度的SAR平台定位,具有一定的工程实用价值。
References)
[1] Wiley C. Synthetic aperture radars[J]. IEEE Transactions on Aerospace and Electronic Systems, 1985, AES-21(3): 440-443.
[2] 李想, 朱遵尚, 尚洋, 等. 方向矩异源图像匹配算法[J]. 国防科技大学学报, 2015(1): 153-158.
LI Xiang, ZHU Zunshang, SHANG Yang, et al. Multimodal image registration based on orientation-moment[J]. Journal of National University of Defense Technology, 2015(1): 153-158. (in Chinese)
[3] 李亚超, 吕孝雷, 王虹现, 等. 高精度景象匹配下的高速SAR平台定位和测速[J]. 系统工程与电子技术, 2007, 29(11): 1851-1855.
LI Yachao, LYU Xiaolei, WANG Hongxian, et al. Research on positioning and measuring speed in the high speed SAR system based on high precision map matching[J]. Systems Engineering and Electronic, 2007, 29(11): 1851-1855. (in Chinese)
[4] 秦玉亮, 李宏, 王宏强, 等. 基于SAR导引头的弹体定位技术[J]. 系统工程与电子技术, 2009, 31(1): 121-124.
QIN Yuliang, LI Hong, WANG Hongqiang, et al. Missile location based on SAR seeker[J]. Systems Engineering and Electronic, 2009, 31(1): 121-124. (in Chinese)
[5] 李天池, 周荫清, 马海英, 等. 基于参数估计的SAR定位方法[J]. 系统工程与电子技术, 2007, 29(3): 372-374.
LI Tianchi, ZHOU Yinqing, MA Haiying, et al. SAR position method based on parameter estimation[J]. Systems Engineering and Electronic, 2007, 29(3): 372-374. (in Chinese)
[6] 程华, 陆微微, 田金文. 基于最小二乘支持向量机的SAR平台定位[J]. 宇航学报, 2010, 31(2): 489-494.
CHENG Hua, LU Weiwei, TIAN Jinwen. SAR platform geo-location based on least squares support vector machines[J]. Journal of Astronautles,2010, 31(2): 489-494. (in Chinese)
[7] 刘晓春, 钟涛, 于起峰, 等. 基于局部频率信息和单纯型-模拟退火的异源图像配准[J]. 光学学报, 2013(06): 196-206.
LIU Xiaochun, ZHONG Tao, YU Qifeng, et al. Multi-modal image registration based on local frequency information using modified simplex-simulated annealing algorithm[J]. Acta Optical Sinica, 2013(06): 196-206. (in Chinese)
[8] Liu X C, Lei Z H, Yu Q F, et al. Multi-modal image matching based on local frequency information[J]. EURASIP Journal on Advances in Signal Processing, 2013, 3: 1-11.
[9] 王冬红, 王番, 周华, 等. SAR影像的几何精纠正[J]. 遥感学报, 2006, 10(1): 66-70.
WANG Donghong, WANG Fan, ZHOU Hua, et al. Precise Rectification of SAR Images[J]. Journal of Remote Sensing,2006, 10(1): 66-70. (in Chinese)
[10] 陈圣义. 空地导弹景象匹配制导关键技术研究[D]. 长沙:国防科学技术大学, 2012.
CHEN Shengyi. Study on key technology of scene matching guidance for air-to-ground-missile[D]. Changsha:National University of Defense Technology, 2012. (in Chinese)
SAR positioning method based on high-precision scene matching
CHEN Shengyi1,2, LIU Xiaochun1,2, TENG Xichao1,2, LI Xiaoxue1,2, LEI Zhihui1,2
(1. College of Aerospace Science and Engineering, National University of Defense Technology, Changsha 410073, China;2. Hunan Key Laboratory of Videometrics and Vision Navigation, National University of Defense Technology, Changsha 410073, China)
A SAR platform location method which utilizes the high-precision scene matching of SAR images and optical reference images was proposed. According to that the projections of SAR platform and object point in SAR image centerline are collinear, some points on the centerline were equably engaged as control points in the proposal method, and then the spatial position was obtained by matching with optical reference image. The equation of the projection line on the local horizon of centerline was estimated with the points. The projection point position of the SAR platform on the horizontal plane was calculated by making use of the straight line and slant-range-altitude information, as well as the spatial position of the platform. Considering the difference between boresight and squint imaging mode, rough rectifying methods were respectively proposed according to the two modes to improve the matching precision. The impact of different errors on location precision was also analyzed and the precision estimation formulas were derived. Both simulation and real data test results show high accuracy and precision of the proposed method, thus bringing forth good practical value for engineering.
synthetic aperture radar; platform geo-location; scene matching; line fitting; error propagation
10.11887/j.cn.201605019
http://journal.nudt.edu.cn
2015-05-27
国家重大科学仪器设备开发专项资助项目(2013YQ140517)
陈圣义(1989—),男,江西萍乡人,博士研究生,E-mail:chensy8904@sina.com;刘晓春(通信作者),男,讲师,博士,E-mail:lxc1448@163.com
TP391.4
A
1001-2486(2016)05-121-06
猜你喜欢
水电站机电技术(2022年4期)2022-04-18
小读者(2019年20期)2020-01-04
小资CHIC!ELEGANCE(2019年41期)2019-12-10
智富时代(2019年4期)2019-06-01
智富时代(2019年4期)2019-06-01
制造技术与机床(2018年10期)2018-10-13
小太阳画报(2018年2期)2018-05-14
雷达学报(2017年1期)2017-05-17
中外医疗(2015年5期)2016-01-04
浙江理工大学学报(自然科学版)(2015年5期)2015-03-01
