
串励电动机电枢并联支路的停车制动方法
2016-11-26 07:51彭亦稰陈小元
微特电机 2016年8期
彭亦稰,陈小元
(丽水学院,丽水 323000)
串励电动机电枢并联支路的停车制动方法
彭亦稰,陈小元
(丽水学院,丽水 323000)
串励电动机的励磁绕组与电枢绕组串联,常用的电磁制动方法是切换两绕组的连接端,电路复杂。依据电动机实现电磁制动的原理,提出一种只需在电路中增设一个功率开关管,制动时电枢并联支路的停车制动方法;分析了制动电路的特点、设定电路参数,并通过应用进行了验证。
串励电动机;停车制动;电枢;并联支路
0 引 言
串励电动机的励磁绕组与电枢绕组串联,能在交、直流电源下运行,具有软机械特性[1-2],广泛应用于电动工具、缝纫机和搅拌机等设备。采用PWM直流斩波控制调节串励电动机的直流端电压,即构成了直流串励电动机的调压调速系统[3-4]。若要求系统具有电磁制动功能,常用的方法是在驱动电路中增设4个功率开关管,控制切换励磁绕组与电枢绕组的连接端,改变串励电动机的电磁转矩方向,实现电磁制动[5-6]。为了限制电动机的制动电流,在切换连接端的同时要降低电动机的端电压,并接入限流电阻,电路及其控制较复杂。
基于改变电动机电磁转矩方向实现电磁制动的原理,本文提出一种只需在驱动电路中增设一个功率开关管,制动时串励电动机电枢并联支路的停车制动方法。分析制动电路的特点,设定制动电路的参数,并应用举例。
1 制动电路的工作原理
图1所示为串励电动机电枢绕组并联制动支路,实现停车电磁制动的电路。当电动机需停车制动时,先将电源电压下降至制动电压Uz,再闭合图中的开关S,将电枢绕组与串有限流电阻Rz的制动支路并联。此时电动机转速n和励磁电流I的方向没变,电枢电动势E的方向不变;而电枢电流I1在电动势E的作用下改变了方向,使电动机的电磁转矩T反向,实现了电磁制动。当电枢电流I1接近零时,电磁制动完成,切断电源停车。

图1 串励电动机电枢并接制动支路的电路
图1中,将电压降至Uz及串接电阻Rz是为了限制励磁电流I和电枢电流I1,要求电流最大不超过电动机额定电流IN的1.5倍。
当I1为零时,电枢电动势:
(1)
式中:Rf为串励电动机的励磁绕组电阻。I1为零时的励磁电流:
(2)
I1为零时,电动机的转速用nz表示:
(3)
式中:kf为电动机的励磁系数,轻载时为常数,负载加重时随电机磁路饱和而减小,可通过实验测取。转速nz控制在电动机额定转速nN的5%左右。
若I1为零时不切断电源,电枢电流I1又将反向,电动机的电磁转矩T也将反向,重新起驱动作用。如果负载转矩TL较重,电动机将减速至停车,其堵转电枢电流:
(4)
式中:Ra为串励电动机的电枢绕组电阻。如果电动机空载或轻载,电动机将运行低于nz的某一转速。必须切断电源,电动机才能可靠停车。
2 制动电路的参数设定
对图1所示制动电路,当开关S闭合时,列电路方程:
(5)
解得:
(6)
由式(6)的第一式可知,当n=nz时,电枢电流I1=0;制动开始时,n≫nz,I1<0,但I1的绝对值最大;随着制动的进行,I1的绝对值降为零。
由式(6)的第二式可知,制动开始时,因I1<0,励磁电流I最小,为了产生必要的制动转矩,励磁电流I应不小于0.5IN。随着制动的进行,励磁电流I增大,当I1=0时,I最大如式(2)所示。
励磁电流I随着制动的进行而增大,可使制动时的电磁转矩不会随电枢电流I1绝对值减小而迅速减小,对制动有利。
设I1=0时的转速nz=0.05nN,由式(3)得:
(7)
制动开始时,设|I1|≤1.5IN,则电动机的端电压Uz:
(8)
式中:n为制动开始时电动机的转速。制动结束时,设I ≤1.5IN,则电动机端电压:
(9)
要求电动机端电压Uz取值同时满足式(8)和式(9)。
为了确保制动开始时有必要的制动转矩,由式(6)校算制动开始时电动机的励磁电流I,要求:
(10)
若式(10)不成立,则应重选定Rz和Uz,使式(8)、式(9)和式(10)同时成立。
3 制动电路的应用举例
图2所示为缝纫机用串励电动机调速系统的原理电路,可按不同的控制策略[7-10]在该硬件平台上对串励电动机实施控制。图中,单相交流电源经二极管桥式整流变换为直流电源,由控制器以PWM的控制方式调节电力场效应管VT1的通断占空比,实现对串励电动机端电压的直流斩波调节。系统停车制动时VT2导通,电枢并接串有限流电阻R2制动支路,实现电磁制动。

图2 缝纫机用串励电动机调速系统
图2中,电力场效应管为N沟道增强型管5N60(600V,4.5A),其隔离驱动电路由HCPL4504光耦隔离芯片和IR2110驱动芯片构成;数字微控制器采用STM8S105单片机;分别由分压电路和电流霍尔传感器从电路中获取测量的电压和电流,再经过同相输入比例器隔离放大、RC电路滤波和模数转换,输送给控制器。用于电压和电流测量的同相输入比例器是基于LM258双运放芯片构成的。
在串励电动机调速系统中,额定电压UN=220V,额定电流IN=0.3A,额定转速nN=7 000r/min,励磁绕组电阻Rf=157.3Ω,电枢绕组电阻Ra=167.7Ω,励磁系数kf=0.06。
制动电路的参数设定:电枢电流为零时的转速nz=0.05nN=350r/min,限流电阻Rz=kfnz=21Ω;制动开始时,电动机的转速n=nN=7 000r/min,由式(8)和式(9)计算出电动机的制动电压Uz=47V;将选取的Rz和Uz代入式(6),计算出制动开始时的励磁电流I=0.211A>0.5IN,式(10)的校核成立。
串励电动机调速系统的停车制动控制流程,如图3所示。图中的制动电压Uz已预先设定。
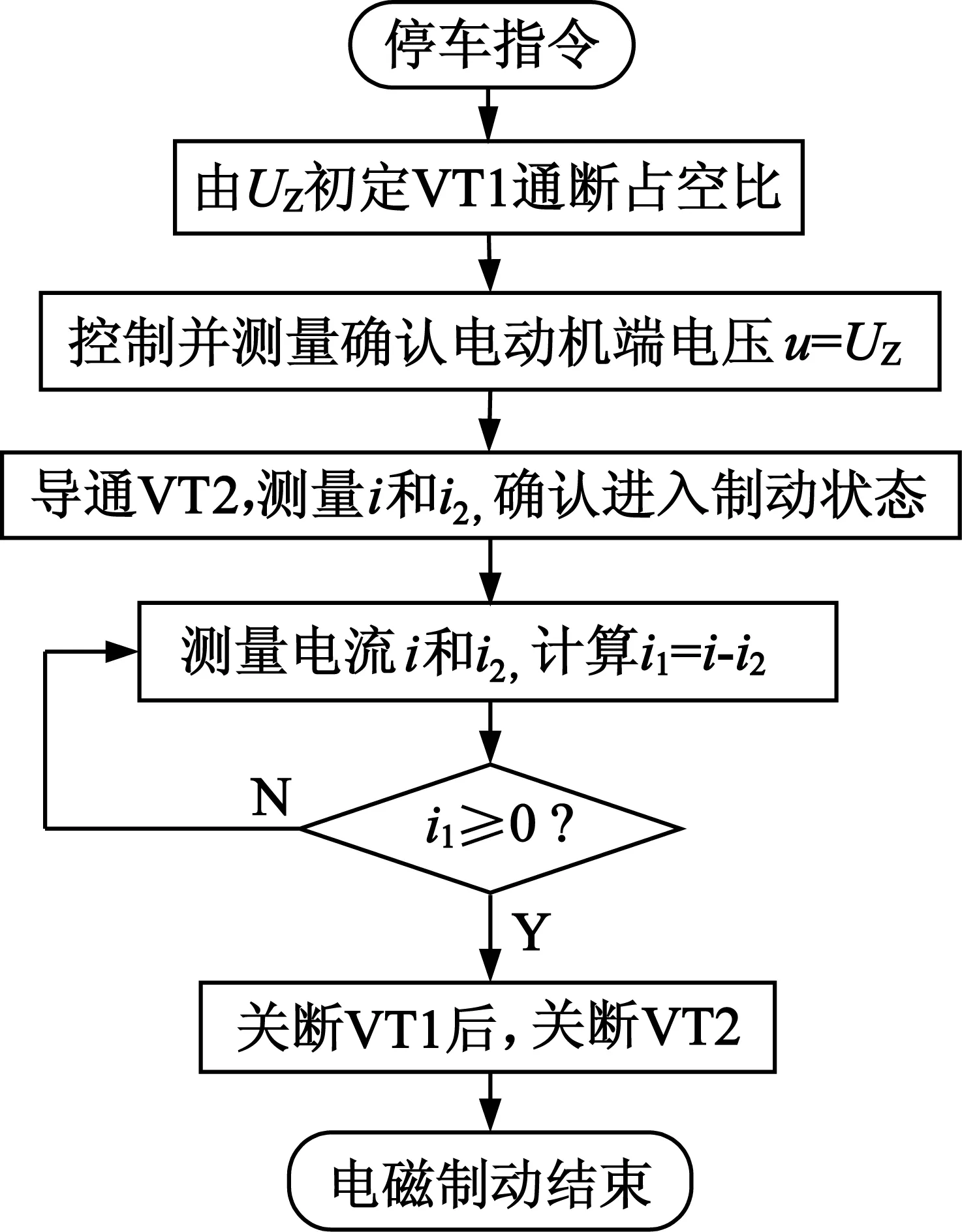
图3 串励电动机调速系统的制动控制流程
制动电压Uz也可以通过控制器实时控制设定:由实测的电动机电压和电流可实时计算出电动机停车制动前的转速[7],再由式(8)和(9)计算出停车制动时电动机的端电压Uz。
4 结 语
在PWM控制的串励电动机直流调速系统中,采用电枢并联支路的停车制动方法,只需在驱动电路中增设一个功率开关管,较用4个功率开关管切换励磁绕组与电枢绕组连接端的常用制动电路简单。在缝纫机调速系统中应用了该停车制动方法,呈现了实用性。
[1] 汤蕴璆.电机学[M].4版.北京:机械工业出版社,2012:331-334.
[2] 中国电气工程大典编辑委员会.中国电气工程大典(第9卷)[M].北京:中国电力出版社,2008:720-727.
[3] 王兆安,黄俊.电力电子技术[M].4版.北京:机械工业出版社,2011:100-112.
[4] 王殉,杜茂华,卢培进.基于单片机的PWM直流调速控制系统设计[J].机械与电子,2011(3):50-53.
[5] 扬州中凌自动化技术有限公司.实现串励电机电子换向和四象限工作的控制方法及其装置:CN201010202165[P].2010-06-18.
[6] 沈阳新阳光机电科技有限公司.安全可靠的直流电机电枢绕组拖动制动转换装置:CN201020184535[P].2011-04-06.
[7] 彭亦稰,陈小元,陈超.串励电动机调速系统的轻载降速控制方法[J].微特电机,2014,42(11):54-57.
[8] 彭亦稰,陈小元,陈超.变电流反馈的串励电动机调压调速控制方法[J].电机与控制学报,2015,19(4):81-86.
[9] 程辉,周洪.基于神经网络PID控制的串励直流电动机调速系统[J].微特电机,2014,42(8):76-79.
[10] 王舰.基于T-S模型的自校正模糊控制器及在串励电机调速中的应用[J].电机与控制学报,2005,9(4):316-320.
Parking Brake Method for the Series-Excited Motor Based on a Parallel Branch with Armature Winding
PENGYi-xuCHENXiao-yuan
(Lishui University,Lishui 323000,China)
The excitation winding and armature winding is contacted in series-excited motor. The common electromagnetic braking method for the series-excited motor is implemented through switching the end connections of the two windings, but the switching circuit is complex. Addressing this problem, a parking brake method for the series-excited motor according to the principle of the motor's electromagnetic brake was proposed. The method only needs to add a power switch tube in the circuit and parallel a branch with the armature winding when braking. Taking the series-excited motor system using the proposed parking brake method as an example, the characteristic of the braking circuit was analyzed, the parameters of the braking circuit were set and the proposed parking brake method is verified correct.
series-excited motor, parking brake, armature winding, parallel branch
2016-01-14
浙江省公益性技术应用研究计划项目(2013C311-14);丽水市高层次人才培养资助项目(2014RC07)
TM33;TM34
A
1004-7018(2016)08-0079-03
彭亦稰(1961-),男,副教授,研究方向为中小功率电机设计及控制。
猜你喜欢
西安石油大学学报(自然科学版)(2022年5期)2022-10-08
弹道学报(2022年3期)2022-10-08
火力与指挥控制(2022年5期)2022-07-25
电加工与模具(2021年1期)2021-02-25
弹箭与制导学报(2020年1期)2020-07-09
环球市场(2020年32期)2020-01-19
弹箭与制导学报(2019年6期)2019-06-24
微电机(2019年3期)2019-04-28
江西化工(2018年5期)2018-11-02
科技与创新(2017年7期)2017-05-13
