侵彻起爆控制系统的过载信息实时采集处理与侵深识别技术
2016-11-25 06:08:23刘宗宝高世桥牛少华刘海鹏管延伟
北京理工大学学报 2016年10期
刘宗宝, 高世桥, 牛少华, 刘海鹏, 管延伟
(北京理工大学 爆炸科学与技术国家重点实验室,北京 100081)
侵彻起爆控制系统的过载信息实时采集处理与侵深识别技术
刘宗宝, 高世桥, 牛少华, 刘海鹏, 管延伟
(北京理工大学 爆炸科学与技术国家重点实验室,北京 100081)
为提高侵彻起爆控制系统的实时性,基于状态网络设计和引信的模块化设计理论,以高速实时信号处理器(DSP)为核心,结合16位高采样率A/D转换器AD7656,并用全硅振荡器取代石英晶体,构建了可抗高冲击过载的微型化(φ40.0 mm)信息实时处理侵彻起爆控制系统;针对传统侵彻过载信号滤波方法的局限性,提出并应用了两种自适应信号快速处理方法,实现了信息的实时处理;半实物仿真和实际侵彻混凝土靶相结合的方案验证了此系统的可靠性,实现了起爆控制系统在高冲击环境中的起爆控制.
起爆控制系统;侵彻;实时处理; DSP
硬目标智能引信的关键技术包括两大部分:一是过载信号的实时采集和记录;二是对这些信号的在线实时处理并实时控制. 在信号实时采集方面,国内外都有了很多技术进展,但在侵彻信号在线实时处理并实时控制方面却还存在许多亟需解决的问题. Sandia国家实验室的小型侵彻加速度记录仪[1],每通道采样频率12 kHz,功率为1.5 W,数据保持时间为60 d,加速度记录仪尺寸φ5.08 cm×12.94 cm,可以进行3轴加速度测试;加拿大Controlex公司研制的非易失性固态记录仪CM343,能够承受105g的侵彻过载,采样频率为100 kHz,存储容量为1 Mb,12位AD采样,16位数据宽度的FLASH存储器.
与国外相比,国内在硬目标智能侵彻起爆控制系统方面起步较晚,技术上还存在一定差距,但也取得了一些成果. 北京理工大学于2003年研制出了侵彻过载测试系统,该测试系统基于CPLD,能够完整记录弹丸在侵彻过程中的过载曲线[2];中北大学于2005,2009和2010年分别研制了基于CPLD[3]、FPGA的一种高冲击随弹固态记录器[4]和基于MSP430的一种用于多层侵彻加速度测试的弹载测试仪,并用于弹体侵彻多层混凝土靶实验;南京理工大学分别以C8051F310和VRS51L3074作为数据处理模块的核心,设计了高冲击加速度存储测试系统. 此外兵总212所、203所、西安机电信息研究所等单位也在侵彻起爆控制系统方面开展了较多的研究.
由于侵彻过程作用时间非常短,数据量又特别大,在这样极短时、大数据量的背景下,如何通过软硬件的设计以及算法的提出解决侵彻信号在线实时处理并实时控制,将是一个很关键的问题. 本文研究了侵彻起爆控制系统的软硬件设计,实现了侵彻过程中过载信息的实时采集处理与侵深识别.
1 系统的总体设计
硬目标侵彻起爆控制系统的状态网络如图1所示,系统上电后计时等待,待系统各状态稳定后,进入待触发状态;在触发信号到来后系统实时存储信号:在状态主链,应用侵深算法进行实时侵彻深度的判断,达到指定侵深(或侵彻层数)之后发出起爆控制信号;在状态副链,系统采集存储完成后进入信息保持状态并等待数据读出.
基于引信的模块化设计理论[5],现代引信设计可分为引信的模块化设计和模块化引信设计,引信的模块化设计是模块化引信设计的基础和前提. 引信各子系统不仅要有各自的子系统功能,还要有标准的连接方式和传递方式. 本文研究目标探测感知识别实体模块系统,它由多个相互关联的子系统组成,具有一定的层次结构和信息联系;它是引信系统的核心,其进一步可分为信息接收(获取)模块,信息转换功能模块,DSP信息处理模块和目标信息存储模块. 状态网络中采集存储状态主要由信息接收和转换模块完成,深度判断状态对应DSP信息处理模块,信息保持状态对应目标信息存储模块.
DSP是运算密集型处理器,相比于事务型处理器(单片机),半定制型处理器(FPGA),DSP具有更快的运算速度,更适合侵彻过程中的实时信号处理. 席晓慧[6]采用TMS320VC5509A设计了可获取横向和轴向信号的起爆控制系统,不过并没有系统样机进行实弹打靶实验,不能验证系统在高速冲击下的工作可靠性;刘杰[7]仅完成了基于F2812的弹载存储测试的系统原理设计,没有实物系统,也没有侵彻试验验证系统的抗冲击性能. 相比于VC5509A, F2812简化了外围电路的设计,易于实现系统的微型化. 本文基于状态网络设计引信的模块化设计理论,分4个模块完成了高采样率起爆控制系统,并进行了该起爆控制系统的冲击测试.
1.1 系统的硬件构成
图2为整个硬件系统的实物照片,电路板装配完成后的直径为φ40.0 mm,而F2812 PGF封装的尺寸为26.2 mm×26.2 mm,几乎达到了F2812系统的尺寸极限,真正实现了基于高性能处理器的微型化系统设计.基于DSP的硬目标侵彻起爆控制系统的硬件主要由传感器、信号调理电路、模拟滤波电路、高采样率A/D转换电路、DSP处理器、数据存储电路构成,其结构框图如图3所示. 整个系统以DSP处理器为控制核心,构成一个完整的硬件系统.
1.2 信息获取模块
信息获取模块主要由高g值加速度传感器及信号调理电路组成,可用于测量侵彻加速度的传感器主要有压阻式、压电式、电容式. 由于压电式具有良好的工作带宽,本系统采用IEPE型压电式加速度传感器,恒流源供电,频率响应范围0~25 kHz,输出信号范围±5 V.
1.3 信息转换功能模块
传感器的频率响应范围为0~25 kHz,考虑到高速侵彻过程对数据采集的需求,因此A/D转换器采用ADI公司的高集成度、6通道16 bit逐次逼近型ADC,其功耗比最接近的同类双极型ADC降低了60%,精度(±4LSB最大值积分线性误差)是同类产品的2倍. AD7656在数据采集的过程中,DSP只需要发出启动AD转换的信号,不需要对采样通道进行控制,这样系统的数据采集速度就完全不受DSP的限制,从而达到信号高速采集的目的.
1.4 DSP信息处理模块
起爆控制系统以TMS320F2812处理器为核心,外围电路主要有A/D转换电路、JTAG仿真接口电路、电源电路、时钟电路、RS232通讯电路、RAM与FLASH电路,图4为DSP系统框图. TMS320F2812是32位高性能处理器,若系统工作在150MIPS,时钟周期6.67 ns,在AD7656的采样时间(4 μs)内可以执行600条指令,可以完成数据的高速采集并实时给出运算结果,实现侵彻过程中信息的实时处理. 目标信息存储模块存储容量为512 k×16 bit,数据存储时间为(512/250) s=2.048 s.
常用的石英晶体振荡器的机械特性使其在高过载环境下晶体薄片易损坏(物理损坏或结构损坏)而停振[8],一般的RC振荡电路达不到较高的振荡频率. 硅振荡器基于一个内部的RC时间常数来获得振荡频率,具有与裸硅片相同的抗过载能力,达到2×105g,并且没有磨损问题,稳定性是石英晶体的10倍,因此本系统采用硅振荡器取代传统石英振荡器.
2 控制系统信息实时处理与识别技术
硬目标起爆控制系统软件部分主要包括数据采集算法和侵彻深度识别算法. 软件的工作流程如图5所示. 首先在弹丸发射时,激活弹上的热电池,在几个毫秒的时间输出稳定的电压. 侵彻起爆控制系统在供电稳定以后,首先进行初始化操作,即数据空间分配、I/O端口定义等;然后系统软件控制AD7656高速实时采集侵彻过程中的加速度,并应用算法1和算法2对采集到的加速度进行实时在线预处理(滤波),如图6所示,算法1、算法2分别为自适应拉伊达准则算法[9]和非线性自适应消噪算法[10]. 如果侵彻加速度信号含有较多高频噪声,则优先选择非线性自适应消噪算法,否则可选择实时性更强的自适应拉伊达准则算法. 侵彻加速度预处理后进行标度变换,然后实时计算侵彻深度. 当侵彻深度达到预设起爆深度时,发出起爆信号;如果没有满足起爆条件,继续进行AD采集与数据处理,重复上面的过程. 通过合理分配起爆控制系统软件中信号高速采集算法、滤波算法和侵彻深度识别算法的时序,可以实现侵彻深度与信号高速采集、滤波的同步处理,达到对侵彻过程中的信息实时处理与识别的目的.
滤波是侵彻信号处理、目标识别和精确起爆控制的前提,在侵彻信号的滤波方法中,可分为3种:滤波电路、基于频率的滤波方法和基于信号统计量的滤波方法. 基于滤波电路的滤波方法必然会增加起爆控制系统的体积和系统功耗,不利于系统的微型化. 由于侵彻信号是一种典型的非平稳信号,频率成分相互重叠,基于频率的滤波方法难以提取“干净”的刚体过载,因此基于信号统计量的滤波方法逐渐成为侵彻信号处理和分析的首选.
因此提出并应用了两种实时性较强的自适应滤波算法,提高了目标实时识别的准确性,为侵彻起爆控制提供了可靠信息.
2.1 自适应拉伊达准则算法
由于拉伊达准则中固定判据|vi|>3σ,即以相同的置信水平处理数据. 对于统计特性随时间变化的侵彻过载信号,不能准确地滤除弹体结构响应和高频噪声. 将拉伊达准则中的判据3σ改为kσ,令k=k0+kw,k0为一个恒定的初始值,kw为k的变化梯度. 为了适应滤波的需要,可以通过改变梯度kw来调整k值. 一般情况下k值范围为k∈[1.3,5.0],此时判别准则表达式为
(1)
2.2 非线性自适应消噪算法
时间序列为{x1,x2,…,xN},将此时间序列分成窗口大小为w=2n+1个点的若干小段,相邻分段(区间)之间有n+1个点重合,因此此非线性算法的时间尺度为n+1. 每个分段采用阶数为K的多项式拟合,第i和i+1个分段的拟合多项式分别表示为yi(l1),yi+1(l2),l1,l2=1,…,2n+1.
分段拟合曲线为:
(2)
式中K为多项式阶数,一般取K=2.
权重为ω1,ω2为3次函数时曲线处处平滑(不只是连续),消除了间断点,这对于侵彻过程中目标介质变化和介质材料的识别至关重要,此时
(3)
式中l为重叠区域y(c)的长度,l=1,2,…,n+1.
算法流程如下:
① 在窗口i和i+1内,由最小二乘法计算系数a0,a1,…,aK和b0,b1,…,bK;
② 计算第i和i+1个分段的拟合多项式yi(l1),yi+1(l2);
③ 计算3阶非线性权重ω1,ω2;
④ 计算重叠区域曲线y(c)=ω1y(i)(l1)+ω2y(i+1)(l2);
⑤ 滤波窗口移动至第i+1和i+2区间,重复上面过程.
2.3 实时侵深识别
对于侵彻深度识别,用梯形积分法在线计算实时侵彻深度为
(4)
(5)
式中:at为t时刻的弹丸侵彻目标的加速度A/D转换的数字量;vt-1为t-1时刻的弹体轴向速度;l(t-1)为t-1时刻弹体侵彻行程. 将速度积分式(4)带入侵深公式(5),得
(6)
侵彻加速度信号在线处理时,对每一个A/D采样点得到的数据积分需要大量的DSP处理器指令周期以及频繁的程序调用、中断与返回,因此本系统中采用了下采样的方法,即在线计算实时侵彻深度时,对高速率采样得到的侵彻加速度信号进行一次下采样. 实验表明下采样因子为4时,系统软件中信号高速采集算法、滤波算法和侵彻深度识别算法的时序可以很好的匹配,系统在不损失精度的条件下可以实现信号的实时在线处理.
3 系统的测试
3.1 半实物仿真测试
利用开发的BITHRSS-01半实物仿真系统,对基于DSP的硬目标侵彻起爆控制系统进行了仿真测试. 运行此仿真系统,对比不同侵彻初速度(538,630,763,800 m/s)下采集到的侵彻加速度与试验加速度(如图6所示)及仿真侵彻位移(见表1),采集到的侵彻加速度与试验加速度十分吻合,并且仿真侵彻位移与实测位移的绝对误差小于50 mm,相对误差都在10%以内,表明此侵彻起爆控制系统采集处理数据准确可靠,系统误差小,可以用于实际弹丸侵彻混凝土靶实验中.
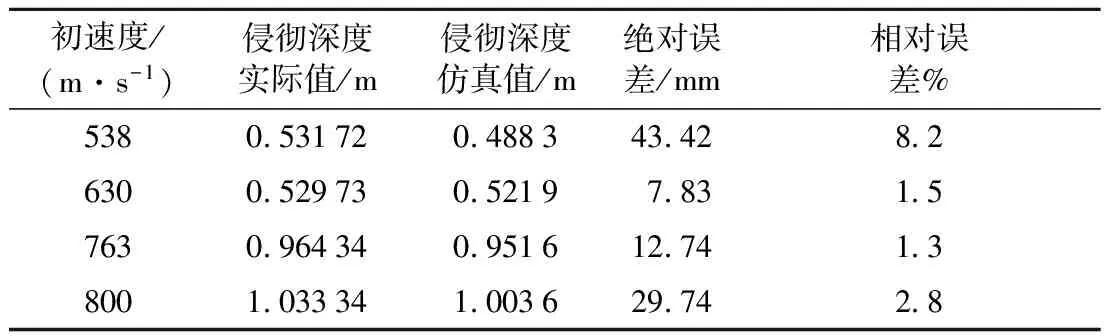
初速度/(m·s-1)侵彻深度实际值/m侵彻深度仿真值/m绝对误差/mm相对误差%5380531720488343428263005297305219783157630964340951612741380010333410036297428
3.2 侵彻混凝土靶测试
弹丸垂直侵彻混凝土靶试验中,靶板为半无限厚混凝土,通过高速摄像机和测速装置所测得的弹丸的着靶速度为355 m/s. 打靶实验后,将弹丸从靶板中取出,并从弹丸内取出起爆控制系统,对弹丸侵彻深度进行测量,侵彻深度约为0.7 m. 将起爆控制系统与计算机连接读取存储数据,图7(a)为本次测试中读取的加速度-时间数据曲线,图7(b)为积分得到的位移-时间曲线,初始速度为350 m/s,侵彻深度为0.6 m,积分所得速度和侵彻深度与测量值吻合很好,说明此侵彻起爆控制系统抗冲击能力强. 仿真结果与侵彻混凝土靶实验表明,所开发的起爆控制系统适合于弹丸侵彻的高速信号采集与处理,并且失真小,精度高,可以实现预期功能.
4 结 论
基于状态网络设计和引信的模块化设计理论,以高速数字信号处理器F2812为核心,结合16位高采样率A/D转换器AD7656,设计了硬目标侵彻起爆控制系统;此系统中采用全硅振荡器取代石英晶体,结合抗高冲击的灌封材料与灌封工艺,在冲击环境下可承受较高的冲击过载. 针对传统侵彻过载信号滤波方法的局限性,将自适应滤波算法应用于本系统中,通过合理分配起爆控制系统软件中信号高速采集算法、滤波算法和侵彻深度识别算法的时序,实现了过载信息的实时处理与识别. 同时对硬目标侵彻起爆控制系统进行了半实物仿真及侵彻混凝土靶测试,测试结果表明本文设计的起爆控制系统信号实时处理性强,可扩展性和可靠性好,失真小,满足了侵彻控制系统的需求,可以用于实际的工程应用中.
[1] Franco R J, Platzbecker M R. Miniature penetrator (MINPEN) acceleration recorder development and test[R]. New Mexico, USA: Sandia National Laborator-ies, 1998.
[2] 张计恒.弹载存储测试技术研究[D].北京:北京理工大学,2005.
Zhang Jiheng. Study on the stored testing and measuring system[D]. Beijing: Beijing Institute of Technology, 2005. (in Chinese)
[3] Zhang W D, Chen L J, Xiong J J, et al. Ultra-highgdeceleration-time measurement for the penetration into steel target[J]. International Jounal of Impact Engineering, 2007,34:436-447.
[4] 文丰,任勇峰,王强.高冲击随弹测试固态记录器的设计与应用[J].爆炸与冲击,2009,29(2):221-224.
Wen Feng, Ren Yongfeng, Wang Qiang. Design of a missile-borne solid-state recorder for high-shock test and its application[J]. Explosion and Shock Waves, 2009, 29(2):221-224. (in Chinese)
[5] 高世桥. 引信模块化设计研究[J]. 兵工学报,2001,22(2):185-188.
Gao Shiqiao. A study on the modularization design of fuze systems[J]. Acta Armamentarii, 2001,22(2) :185-188. (in Chinese)
[6] 席晓慧.基于DSP的智能引信起爆控制系统的开发与设计[D].太原:中北大学,2007.
Xi Xiaohui. Design and development of the smart fuze control system based on DSP[D]. Taiyuan: North University of China, 2007. (in Chinese)
[7] 刘杰.DSP在存储测试中的应用[D].太原:中北大学, 2009.
Liu Jie. The application of the DSP in storage measurement[D]. Taiyuan: North University of China, 2009. (in Chinese)
[8] 李乐,祖静,徐鹏.晶振芯片在高g值冲击下的失效机理分析[J].仪器仪表学报,2006,27(增刊2):2589-2590.
Li Le, Zu Jing, Xu Peng. Failure mechasim of crystal oscillator under high-gshock[J].Chinese Journal of Scientific Instrument,2006,27(suppl 2):2589-2590. (in Chinese)
[9] Liu Z B, Gao Sh Q, Du J Q. An algorithm for measurement data eliminating gross error and smoothing[C]∥Proceedings of the 31st Chinese Control Conference. Hefei, Anhui: IEEE, 2012:7582-7587.
[10] Liu Zongbao, Gao Shiqiao, Liu Haipeng, et al. Nonlinear adaptive noise-induced algorithm and its application in penetration signal[J]. Measurement, 2014,58:556-565.
(责任编辑:刘雨)
Real-Time Information Sampling and Processing and Penetration Depth Identification of Penetrating Detonation Control System
LIU Zong-bao, GAO Shi-qiao, NIU Shao-hua, LIU Hai-peng, GUAN Yan-wei
(State Key Laboratory of Explosion Science and Technology, Beijing Institute of Technology, Beijing 100081, China)
To improve the real-time performance of penetrating detonation system, a miniaturized (φ40.0 mm)hard target penetrating detonation system was proposed based on design theory of state network and modularization design of fuze systems. Equipped with real-time digital signal processor (DSP), high-sampling-rate AD7656 and silicon oscillator instead of crystal oscillator, the system could process information in real-time and bear high shock. For the limitations of traditional filtering methods, two adaptive and fast methods were proposed to improve the system and realize real-time over loading information process in penetration. Combining hardware-in-the-loop simulation test and field test, the penetrating detonation system is demonstrated to be reliable under shock loading.
detonation control system; penetration; real-time processing; digital signal processor
2015-01-12
国家自然科学基金资助项目(11372045)
刘宗宝(1988—),男,博士生,E-mail:JAY7575@163.com;高世桥(1961—),男,教授,博士生导师,E-mail:gaoshq@bit.edu.cn.
牛少华(1975—),男,博士,讲师,E-mail:shh@bit.edu.cn.
TJ 43
A
1001-0645(2016)10-1025-06
10.15918/j.tbit1001-0645.2016.10.008
猜你喜欢
当代水产(2022年6期)2022-06-29 01:12:20
中学生数理化·七年级数学人教版(2020年11期)2020-12-14 06:59:52
艺术品鉴证.中国艺术金融(2018年8期)2019-01-14 01:14:28
艺术品鉴证.中国艺术金融(2018年10期)2019-01-08 02:44:26
汽车观察(2018年12期)2018-12-26 01:05:42
金桥(2018年4期)2018-09-26 02:24:46
劳动保护(2018年8期)2018-09-12 01:16:14
艺术品鉴证.中国艺术金融(2018年12期)2018-08-26 06:03:48
空间控制技术与应用(2015年3期)2015-06-05 14:30:31
遥测遥控(2015年2期)2015-04-23 08:15:18