基于混合控制策略的馈能悬架半主动控制
2016-11-24 07:38陈龙施德华汪若尘周华伟
北京理工大学学报 2016年3期
陈龙,施德华,汪若尘,周华伟
(1.江苏大学 汽车与交通工程学院,江苏,镇江 212013;2.江苏大学 电气信息工程学院,江苏,镇江 212013)
基于混合控制策略的馈能悬架半主动控制
陈龙1,施德华1,汪若尘1,周华伟2
(1.江苏大学 汽车与交通工程学院,江苏,镇江 212013;2.江苏大学 电气信息工程学院,江苏,镇江 212013)
为使馈能悬架在一定范围内实现半主动控制,基于混合控制策略,确定了电机电磁阻尼力的控制算法.探讨了电机不同电磁阻尼力对悬架性能的影响及馈能悬架实现半主动控制的条件.在此基础上,以整车舒适性为目标,采用粒子群优化算法确定了电机阻尼力控制参数,并设计了直接电流控制器,使直线电机产生所需的电磁阻尼力.最后,对采用基于混合控制策略的馈能悬架进行了随机路面激励下的仿真分析.结果表明,优化的电机阻尼力控制参数能使馈能悬架实现半主动控制,显著改善馈能悬架的舒适性和平顺性,并能回收悬架部分振动能量.
直线电机;馈能悬架;混合控制;粒子群;直接电流控制
馈能悬架通过回收振动能量,提高了整车的燃油经济性,相关理论和试验研究验证了悬架振动能量回收的可行性[1].电磁阻尼器将振动能量转化为电能进行回收,回收效率高[2-4],但是当电磁阻尼器仅用作被动阻尼器时,其阻尼力不可调,而且易在馈能电压较低时出现死区现象,使馈能悬架性能恶化[4].
为此,学者们提出将电磁式悬架主动/半主动控制与能量回收技术相结合,在降低悬架能耗的同时提高其性能.半主动控制(无源主动控制)几乎不消耗车辆动力,得到了广泛的应用.Okada等[5]引入被动、主动以及馈能等控制方式,几乎不额外消耗电能,实现了馈能悬架高速运动时的馈能性能和低速时的隔振性能,改变了馈能电压较低时的悬架阻尼特性.Nakano等[6-7]提出了通过改变馈能回路的电阻调节能量回馈过程中电机电磁阻尼力,实现半主动控制,提高了悬架的隔振性能,并进一步将其应用到货车驾驶室的隔振中.但悬架在馈能模式中不能实现阻尼无级可调,限制了悬架性能的提高.
文中采用直线电机式馈能悬架回收悬架振动能量,并对馈能悬架进行半主动控制,使电机阻尼力在有限范围内连续可调,探讨了电机不同电磁阻尼力对悬架性能的影响以及馈能悬架实现半主动控制的条件,在此基础上,以舒适性为目标,采用粒子群优化算法确定了混合控制策略的控制参数,并设计了直接电流控制器,使电机电磁阻尼力跟踪理想控制力.
1 悬架系统数学模型
建立如图1所示的悬架1/4车辆单轮动力学模型.图中:m1为簧载质量;m2为非簧载质量;z1为簧载质量位移;z2为非簧载质量位移;z0为路面不平度输入;Ks为悬架刚度;Kt为轮胎刚度.
根据建立的1/4车辆悬架模型,得到如下的动力学微分方程
(1)
式中F为由直线电机提供的电磁阻尼力.国内外学者针对悬架的半主动控制策略进行了深入地研究,其中,兼顾天棚-地棚控制思想的混合控制策略同时考虑了车辆的舒适性和操稳性[8],在悬架半主动控制中得到了广泛应用.基于混合控制策略,确定电机需提供的电磁阻尼力F为
(2)
式中:cs为簧载质量速度反馈增益;cg为非簧载质量速度反馈增益.为使悬架系统具有较好的动态性能,应满足cs>0,cg≤0.
馈能悬架半主动控制的实现原理为:馈能悬架中直线电机在路面随机激励下以发电机模式工作,电机绕组产生感应电流,通过控制悬架馈能回路中的DC-DC变换器,实时调节电机绕组感应电流,使电机电磁阻尼力在一定范围内(不超过直线电机以发电机模式工作时能产生的最大电磁阻尼力Fmax)连续可调,提高馈能悬架性能,系统工作时几乎不消耗车辆动力,并能回馈悬架部分振动能量,实现了半主动控制(无源主动控制).系统馈能回路拓扑结构如图2所示.其中,超级电容SC仅用来储存回收的振动能量,而不向直线电机提供电能.
电机以发电机模式工作时,能产生的最大电磁阻尼力Fmax为
(3)
式中:Ki为直线电机推力系数;Imax为绕组最大电流.绕组最大电流Imax受电机工作速度的限制,为
(4)

由式(3)(4)得
定义ce=KeKi/R为电机电磁阻尼系数,由电机特性参数决定.
2 直线电机特性参数获取
直线电机的特性参数对馈能悬架性能及悬架实现半主动控制的工作区间有关键影响.通过电机随动特性试验获取电机的特性参数.试验设备包括INSTRON 8800数控液压伺服激振试验台、示波器、万用表以及电阻等.试验时,电机电枢与加载盘固定,永磁杆动子在激振头作用下做正弦运动,电枢绕组通过整流器外接10 Ω的负载.电机的电磁阻尼力-速度特性的获取参照减振器特性试验.图3表示了电机在不同工作速度下的反电势峰值-速度特性曲线和电机阻尼力-速度特性曲线.
由图可知,电机反电势峰值和电磁阻尼力均与电机工作速度近似成线性正比关系,电机随动特性下线性度较好.通过数据拟合,得到直线电机反电势系数为62.6 V/(m·s-1),推力系数为77.9 N/A,内阻为10.2 Ω.
3 控制参数分析
电机阻尼力控制参数cs和cg既影响悬架系统的动态性能,也是馈能悬架实现半主动控制的关键.馈能悬架实现半主动控制的区间受到ce的限制,令
(5)
式中:a(a>0)反映了簧载质量速度反馈增益cs与电磁阻尼系数ce之间的关系.进一步地,为了建立cg与ce之间的关系,令cg=-ncs(n>0),即
(6)
针对建立的馈能悬架二自由度模型,首先分析不同a和n时F对悬架性能和馈能悬架实现半主动控制的影响.由于拟采用直线电机阻尼力无法满足二自由度悬架模型的参数需求,文章选用某乘用车单轮悬架系统的1/2比例模型进行仿真分析,模型参数如表1所示.

表1 模型参数
3.1 对悬架性能的影响
为了分析F对悬架性能的影响趋势,分析令a=0.5保持不变,n分别为0.50,0.75和1.00,以及令n=1,a分别为0.5,1.0,1.5时悬架系统性能评价指标(车身加速度、悬架动行程和轮胎动载荷)增益幅值的频率响应特性,如图4所示.
3.2 馈能悬架半主动控制的实现
馈能悬架实现半主动控制时,电机控制力F在不大于Fmax的区间内连续可控,即
(7)
为了分析不同激振频率下F和Fmax的关系,由式(1)~(7)进行拉普拉斯变换可得
(8)
定义λ为模式因子,当λ<1时,悬架系统工作在馈能模式,实现馈能,无需额外消耗电源能量,电机以发电机模式工作能够产生足够的电磁阻尼力给悬架系统减振,实现半主动控制;当λ>1时,悬架系统工作在耗能模式,需要额外消耗电源的能量实现悬架系统的主动控制,直线电机以电动机模式工作;当λ=1时,悬架系统既不消耗电源能量,也不向电源回馈能量,悬架系统的振动能量全部消耗在电枢绕组和电路内阻上.
若令s=i2πf,则由式(8)可得
图5表示取不同a和n时λ的变化曲线.当a=1.0时,λ曲线在n<1.0、n=1.0和n>1.0时分别有不同的形状,文章分别取n=0.5,1.0和1.5进行分析.
当n=1.0时,λ=a,结合图5(a)、5(c)可知,λ曲线为一直线,若a<1.0,馈能悬架在整个频域内满足λ<1.0,实现馈能和半主动控制;若a>1.0,则λ>1.0,电机在整个频域内需要额外消耗电源的能量实现悬架的主动控制;a=1.0时,电机相当于被动的电磁阻尼器.
若n<1.0,结合图5(a)、5(b)可知,当a较小时,λ曲线与λ=1.0仅有一个交点,记该点横坐标为fd,fd随着a的增大而增大,在小于fd(λ(fd)=1)的频带内,电机需要额外消耗能量以满足悬架减振的要求;在大于fd的频带内,λ<1.0,电机实现馈能和半主动控制.当a增大到一定值时,λ恒大于1.0,此时馈能悬架在整个频域内需要额外消耗电源能量.
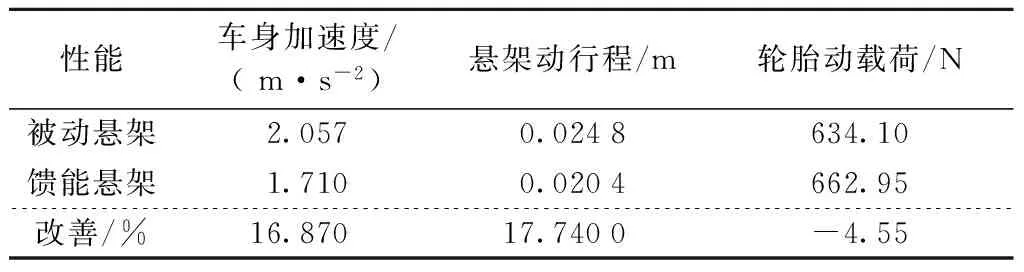
若n>1.0,结合图5(a)、5(d)可知,λ曲线在低频共振区附近存在最小值.当a较小时,λ曲线与λ=1.0仅有一个交点,记该点横坐标为fc(λ(fc)=1.0),则电机在小于fc的频带内消耗电源能量,而在大于fc的频带无需消耗电源能量.当a增大时,λ曲线与λ=1.0出现两个交点,两点横坐标分别记为fc1和fc2(fc1 3.3 控制参数确定 在分析控制力参数对悬架性能和悬架实现半主动控制工作区间影响规律的基础上,采用粒子群算法确定控制力的优化参数,粒子的位置和速度更新公式为 (9) 由前述分析可知,当n>1时,需使a较小,以增加馈能悬架实现半主动控制的工作区间,而a过小,又会使馈能悬架性能恶化.因此,选定n的优化区间为[0,1.0],a的优化区间为[0.5,2.0],以车身垂向加速度aw作为目标函数,并建立相应的约束条件,参数寻优的数学模型表示为 (10) 式中:Fd和fd分别为馈能悬架轮胎动载荷和悬架动挠度的均方根值;Fdp和fdp分别为原车被动悬架轮胎动载荷和悬架动挠度的均方根值.参数寻优的基本原则为:在轮胎动载荷和悬架动挠度恶化程度不超过5%的情况下尽可能提高馈能悬架的舒适性. 设定种群规模为30,迭代次数为1 000,粒子群搜索空间维度设为2,分别表示a和n,惯性权重为0.7,学习因子均为1.6,经优化得a=1.46,n=0.55,则cs=730 N·s/m,cg=-401.5 N·s/m. 当电机需提供的理想电磁阻尼力为Fref时,电机绕组理想电流为 (11) 为使电机绕组电流跟踪理想电流,设计了直接电流控制器,如图6所示.模式判别模块根据超级电容端电压UC、电机绕组反电势UM以及理想电流Iref判断DC-DC变换器的工作模式,绕组实际电流Ireal和理想电流Iref的差值经过滞环调节器产生控制VT1或VT2的PWM信号.当λ>1时,馈能悬架无法实现半主动控制,此时,直接电流控制器控制VT1和VT2闭合,超级电容被短路,电机即为阻尼系数为ce的被动电磁阻尼器,电机阻尼力为Fmax. 根据建立的馈能悬架模型,对采用混合控制的馈能悬架进行仿真分析,并与被动悬架比较,仿真参数如表1所示.采用汽车以30 m/s的车速经过C级模拟路面输入.图7表示馈能悬架车身加速度和轮胎动载荷的频域响应,均方根值响应如表2所示. 性能车身加速度/(m·s-2)悬架动行程/m轮胎动载荷/N被动悬架2.0570.0248634.10馈能悬架1.7100.0204662.95改善/%16.87017.7400-4.55 由仿真结果可知,采用优化后的阻尼力控制参数对馈能悬架实施半主动控制,车身加速度在整个频率范围内均有所减小,在低频共振区尤为明显,轮胎动载荷在低频共振区的峰值得到了有效抑制,而在高频共振区,却有所恶化.相比于被动悬架,虽然馈能悬架轮胎动载荷的均方根值增加了4.55%,但车身加速度和悬架动行程得到了显著改善,整车舒适性和平顺性明显提高. 图8表示在路面随机激励下电机的实际电磁阻尼力Freal与电机在当前工作速度下所能产生的最大电磁阻尼力Fmax之间的关系.由图可知,基于优化的混合控制策略控制参数,使电机实际电磁力不超过最大电磁阻尼力,馈能悬架能够实现半主动控制.超级电容端电压由20 V增加为21.31 V,回收了悬架部分振动能量,此时馈能悬架系统馈能功率为13.52 W. 基于混合控制策略,将直线电机的电磁阻尼作用力描述为簧载质量速度和非簧载质量速度的函数,探讨了选取不同控制参数时,电机电磁阻尼力对悬架系统动态性能的影响和馈能悬架实现半主动控制的条件. 通过台架试验,获取拟采用直线电机的特性参数.基于粒子群优化算法,以整车舒适性作为目标函数,确定了电机阻尼力的控制参数.结果表明,优化的控制参数能使馈能悬架实现半主动控制,显著提高了整车舒适性,同时回收悬架部分振动能量. 通过直接电流控制器对馈能回路的控制调节电机绕组电流,使直线电机的电磁阻尼力跟踪系统所需的理想电磁阻尼力,实现电机阻尼力的实时可调. [1] Zuo L,Zhang P S.Energy harvesting,ride comfort,and road handling of regenerative vehicle suspensions[C]∥Proceedings of ASME 2011 Dynamic Systems and Control Conference and Bath/ASME Symposium on Fluid Power and Motion Control.[S.l.]: American Society of Mechanical Engineers,2011:295-302. [2] Li Z,Zuo L,Kuang J,et al.Energy-harvesting shock absorber with a mechanical motion rectifier[J].Smart Materials and Structures,2013,22(2):025008. [3] Palomera-Arias R,Connor J,Ochsendorf J.Feasibility study of passive electromagnetic damping systems[J].Journal of Structural Eingineering,2008,134(1):164-170. [4] 喻凡,张勇超.馈能型车辆主动悬架技术[J].农业机械学报,2010,41(1):1-6. Yu Fan,Zhang Yongchao.Technology of regenerative vehicle active suspension[J].Transactions of the Chinese Society for Agricultural Machinery,2010,41(1):1-6.(in Chinese) [5] Okada Y,Harada H.Regenerative control of active vibration damper and suspension systems[C]∥Proceedings of the 35th IEEE Conference on Decision and Control.[S.l.]: IEEE,1996:4715-4720. [6] Nakano K,Suda Y,Nakadai S.Self-powered active vibration control using a single electric actuator[J].Journal of Sound and Vibration,2003,260(2):213-235. [7] Nakano K,Suda Y.Combined type self-powered active vibration control of truck cabins[J].Vehicle System Dynamics,2004,41(6):449-473. [8] 杨林,赵玉壮,陈思忠,等.半主动油气悬架的神经网络模型参考[J].北京理工大学学报,2011,31(1):24-28. Yang Lin,Zhao Yuzhuang,Chen Sizhong,et al.Neural network model reference control semi-active hydro-pneumatic suspension[J].Transactions of Beijing Institute of Technology,2011,31(1):24-28.(in Chinese) (责任编辑:孙竹凤) Semi-Active Control of Energy-Regenerative Suspension Based on Hybrid Control Strategy CHEN Long1,SHI De-hua1,WANG Ruo-chen1,ZHOU Hua-wei2 (1.School of Automotive and Traffic Engineering,Jiangsu University,Zhenjiang, Jiangsu 212013,China; 2.School of Electrical and Information,Jiangsu University,Zhenjiang, Jiangsu 212013,China) To achieve semi-active control of energy-regenerative suspension in a certain range, the motor electromagnetic damping force was described by the formula related to velocities of sprung mass and unsprung mass based on hybrid control strategy.Since the motor was not powered by external source when semi-active controlled, the control force was limited by the motor maximum electromagnetic force.The influence of damping force on suspension dynamic performance was discussed, as well as the conditions to achieve semi-active control were studied.On this basis, the particle swarm optimization was used to decide the control parameters with ride comfort as objective function.To follow the required damping force, a direct current controller was designed.Finally, the simulation analysis of energy-regenerative suspension with hybrid control strategy under random road excitations was performed.The results show that the optimal control parameters can ensure semi-active control and energy regeneration of energy-regenerative suspension.The ride comfort is improved obviously. linear motor;energy-regenerative suspension;hybrid control;particle swarm;direct current control 2014-06-05 国家自然科学基金资助项目(51407086);江苏省自然科学基金资助项目(BK2012714);江苏省普通高校研究生科研创新计划资助项目(KYLX_1022) 陈龙(1958—),男,教授,博士生导师,E-mail:chenlong@ujs.edu.cn. U463.33 A 1001-0645(2016)03-0252-06 10.15918/j.tbit1001-0645.2016.03.0074 直接电流控制器
5 仿真分析
6 结 论
猜你喜欢
疯狂英语·初中天地(2022年9期)2022-08-29
北京汽车(2021年5期)2021-11-10
电子技术与软件工程(2021年10期)2021-07-05
广西科技大学学报(2021年1期)2021-03-15
北京理工大学学报(2020年11期)2020-12-15
科学与财富(2017年15期)2017-06-03
科学与财富(2017年12期)2017-05-16
科技创新与应用(2017年1期)2017-05-11
汽车技术(2017年4期)2017-04-26
科技与创新(2017年3期)2017-03-17