一种用于高频超声探头的扫描电机及控制系统
2016-11-14 07:03邹艳荣
电子科技 2016年10期
邹艳荣,郑 政
(上海理工大学 医疗器械与食品学院,上海200093)
一种用于高频超声探头的扫描电机及控制系统
邹艳荣,郑 政
(上海理工大学 医疗器械与食品学院,上海200093)
对于以体表器官为主要应用对象的甚高频超声来说,扇扫方式下超声对组织的入射角在整个成像平面上分布极不均匀,会导致图像边缘部分的成像质量严重下降问题。文中提出了一种侧面输出的音圈电机及其伺服控制系统,用于高频超声探头的线性扫描。伺服系统采用STM32F103作为主控芯片,光电编码器作为位置传感器,同时使用PD算法对驱动电压进行PWM调节。系统仿真和实验选择了适当的控制参数,实验结果表明,该电机及其控制系统具有结构简单、精度高的优点,符合超声成像的要求。
音圈电机;伺服控制;高频超声;线性扫描
ZOU Yanrong, ZHENG Zheng
(School of Medical Instrument and Food Engineering, University of Shanghai for Science and Technology,Shanghai 200093, China)
甚高频超声成像广泛用于人体的浅表组织检查,比如眼、皮肤等。由于换能器技术的限制,探头以单晶片聚焦换能器机械扫描方式为主。常用的机械扫描方式是机械扇扫,具有结构简单可靠、声窗尺寸小的优点。但对于以体表器官为主要应用对象的甚高频超声来说,扇扫方式下超声对组织的入射角在整个成像平面上分布极不均匀,导致图像边缘部分的成像质量严重下降,在眼球这样的球器官中这一问题尤其突出。线性扫描是解决这一问题的有效方法。
文献[1]提出用齿轮齿条将直流电机的圆周运动转换成直线运动来实现线性扫描,该方法结构简单、电机传动力大、承载能力强、材料获取容易,但是由于需要利用机械结构进行运动变换,所以振动和噪声较大,长时间使用产生的磨损还会导致传动间隙增加从而导致较大的扫描误差。
提出一种基于音圈电机的直线驱动方法,用于甚高频超声探头,由于省去了运动转换结构,可以有效克服上文提到的缺点。但是音圈电机驱动需要合理设计相应的伺服控制系统,使得超声探头在有效行程内实现高精度的运动。
1 音圈电机结构和伺服控制系统
1.1 音圈电机结构
音圈电机是一种基于安培力原理而设计的电机[2-3],具备良好的静动态性能和控制特性。其无需传动机构就可以直接获得直线运动。
音圈电机由定子和动子两部分组成。定子由圆筒状轭铁、圆柱形铁芯和两块瓦状永久磁铁组成,轭铁和铁芯构成闭合磁路,磁铁贴在轭铁内壁,和轭铁紧密接触,磁铁和铁芯之间的空间形成一个磁隙,其间的磁场近似匀强磁场。动子是一个由滑块和线圈组成的一体结构,滑块安装在直线导轨上,线圈则套在铁芯上,线圈内径略大于铁芯直径而外径略小于磁铁内径,所以动子可沿铁芯方向以直线方式运动。和传统的音圈电机不同,文中的电机运动输出设计在侧面,滑块即是其运动输出端,在滑块上安装超声换能器,即可实现线性扫描。位移传感器的光栅也安装在滑块上,随动子运动。电机的剖面结构如图1所示。

图1 音圈电机剖面图
1.2 伺服控制系统
电机由一个伺服系统控制。该系统由位移传感器、主控芯片和驱动电路3部分组成。位移传感器是由两个光电编码器,固定在电机外壳上,光栅尺则是固定在动子上,随动子运动。
主控芯片采用由STM公司生产的STM32F103VET6芯片。该芯片集成了4个通用定时器(TIM2~TIM5),其中TIM3和TIM4作为光栅解码器,TIM5用作定时计数器,TIM2用作PWM产生。驱动电路是一个H桥开关,以脉宽调制(PWM)方式驱动,控制系统的执行机构便是音圈电机。系统硬件结构如图 2所示。
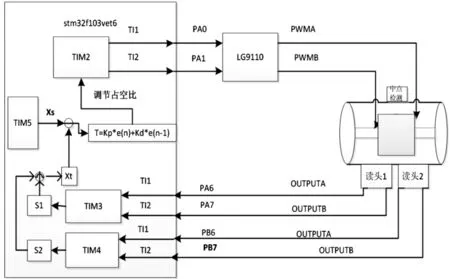
图2 硬件结构图
1.3 位置检测
为了用较短的光栅尺检测较大的位移,文中使用两个增量式光电编码器(图2中的读头1和读头2)作为位置传感器。由于增量式光电编码器不能确定绝对位置,在电机外壳的另一端安装一个光耦,滑块上安装了一个小的遮光片,当滑块运动到光耦的位置时通过I/O外部触发就能检测到该位置,把这个位置设为位移零点。
光栅尺在移动时输出一对正交脉冲信号OUTPUTA和OUTPUTB。这对输出的脉冲信号分别与主芯片内部的TIM3和TIM4的TI1和TI2连接。定时器在编码器模式下可计量脉冲个数,并通过固定时间采样编码器的值。当TIM3和TIM4同时工作时,可以任意取其中一个编码值,当只有一个工作时,那么取该工作定时器的值作为编码值,从而得出这段时间内滑块运动的相对位移[4]。而实际位移的取值是根据相对位移得到的,其取值规律如下:假设在t1时刻,得到相对位移s1,在t2时刻的位移是s2,那么在这段时间内运动的实际位移xt
xt=s1+s2
(1)
1.4 PWM驱动
本文采用的驱动芯片是LG9110。它的内部集成了一个“H”桥双极模式转换调压电路,通过控制两个输入端PWM信号的占空比来调节电机的速度与运动方向[5]。电机电枢两端的平均电压u与PWM的占空比τ和周期T有关,其关系如下
(2)
其中,vcc表示驱动芯片的供电电压,可变范围为5~12 V;T为PWM周期,其为定值。
2 控制系统建模与仿真
2.1 系统模型的建立
伺服系统的驱动电路输出作用在音圈电机的动子线圈上。其等效电路可以看成是由一个电阻和一个电感串联而成,如图3所示。

图3 音圈电机等效电路
根据音圈电机的工作原理,其受到的安培力大小可由下式描述
F=NBil
(3)
其中,N为导电线圈的匝数;l为线圈单圈的周长;B为磁场强度;i为电流强度。另外,其受力方向可根据左手定则判断。
对于本文音圈电机,N,B和l的3个参数均为定值,设k=NBl,代入式(3)后得
F=ki
(4)
如果忽略摩擦力的影响,根据牛顿定律可得
F=ma
(5)
(6)
其中,m为动子的质量;a为动子的加速度;xt为动子的实际位移。
线圈通电后将会作切割磁场运动从而产生感应电动势,感应电动势与速度成正比[6]。根据音圈电机等效电路和感应电动势得出电枢两端电压u,如下
(7)
其中,L为线圈的电感值;R为线圈的电阻。
根据式(2),驱动电机的电压由PWM脉宽和驱动芯片的供电电压决定。而PWM脉宽τ可由指令位移xs和实际位移xt的误差经PD算法调节得到。误差及PD算法式子如下
et=xs-xt
(8)
(9)
由式 (2)和式(4)~式(9)经过拉普拉斯变换得到系统的传递函数
(10)
根据实际测量,N=76,B=0.2 T,l=50.2 mm,m=5.3×10-2kg,L=2.43 mH,T=0.2×10-3s,R=2.2 Ω,将它们代入式(10),其它未知系数都是可调的。
2.2 系统仿真
根据上述建立的系统模型,除实际测量值已知外,驱动芯片供电电压vcc、微分系数kd和比例系数kp的选择会影响电机的动态特性,因此,对不同取值的驱动电压、微分系数和比例系数进行仿真[7]。

图4 不同取值的阶跃响应和频谱
仿真实验结果根据图可以看出,当改变各个参数时,到达稳态的时间不一样,超调量也在发生变化。但在时间趋于无穷大时,稳态误差趋于0。在图4(a)中,其它虚线与实线进行对比,可以看出系统的超调量与响应时间和vcc、kd和kp有密切的关系。当vcc、kd和kp发生变化时,响应时间和超调量均发生明显变化。当kp=0.005,kd=0.000 3,vcc=6 V超调量响应的最大值是1.09,<10%,响应时间0.01 s。高频超声成像的帧频通常约在5 Hz[8-9],即电机运动周期要求0.2 s,0.01 s的响应时间是整个周期的1/20,能够达到控制的要求。在图4(b)中,当角频率为31.4 rad·s-1时,即频率为5 Hz,系统的相位差为0°,表明系统没有相位差。
为进一步验证阶跃响应的可行性和鲁棒性,在kp=0.005,kd=0.000 3,vcc=6 V时,对其进行正弦仿真,结果如图5所示。

图5 正弦响应
图5中当输入信号为5 Hz的正弦信号时,输出也为5 Hz的正弦信号,除了最高点和最低点,输入与输出的误差基本为0,相位差也是0。
根据上述仿真结果可知,该系统具有可行性和鲁棒性。
3 实验结果
根据上述仿真实验分析,本文选定驱动芯片供电电压vcc为6 V,微分系数kd为0.000 3,比例系数kp为0.005。根据连续时间上的采样定律[10],将仿真实验数据转化为离散时间上的系数需要乘以采样频率5 kHz,因此离散时间上的比例系数kp为25,微分系数kd为0.15,在此参数下对系统进行实验。
实验中将指令信号与实际信号经过CPU内部的DAC,然后通过示波器观察并保存DAC输出的数据。而光栅尺每1 mm对应30个计量数,根据DAC输出的电压Vout与n时刻的计量数xt(n)的关系
(12)
将得到的xt(n)值除以30,经由Matlab计算得出f=5 Hz的指令位移和实际位移如图6所示。

图6 f=5 Hz的正弦波
从图中可以看出,实际扫描范围为6.5 mm。指令位移和实际位移有一个相位差,经计算得出相位差为9°,与理论相位差0°有一定的差别,主要原因是实际控制系统中有摩擦和惯性等一些不可避免的因素[11]所造成的;除了最高点与最低点的差值,误差最大为50 μm,是整个行程的0.76%。实验表明,该系统具有响应快、精度高的优点,符合超声成像的要求。
4 结束语
本文设计了一个适用于高频超声成像探头的线性扫描用音圈电机,控制系统利用光栅传感器测量位移信号,利用PWM方式驱动电机运动,以单片机作为主控芯片。实验表明,该电机及其控制系统具有结构简单、精度高的优点,符合超声成像要求。
[1] 柳青青,郑政.AMR传感器在UBM线性扫描探头中的应用[J].传感器与微系统,2013,32(2):146-148.
[2] 黄声花,陶醒世,傅光洁.音圈电机的数学模型及仿真[J].华中理工大学学报,1996,24(8):68-71
[3] Liu T S,Yeh C W,Ke S S,et al . Position control of voice coil motor with shorted turn[M].US:Free Patents Online,2009.
[4] 邓军.STM32编码器器在光栅尺测速场合的实际应用[J].信息技术,2013(8):53-53.
[5] 王金晨,纪成,何印洲.基于PWM的可调速电动汽车模型控制系统的设计[J].伺服驱动系统及其应用,2011(6):42-46.
[6] 雨宫好文,末松良一.机械控制入门[M].北京:科学出版社,2000.
[7] 徐大远,王英健,陈冠军,等.四轴飞行器的动力学建模和位置控制研究[J].电子科技,2015,28(1):69-72.
[8] Hsu Chunfei, Chen Yichuan. Microcontroller based b-spline neural position control for voice coil motros[J]. IEEE Transactions on Industrial Electronics,2015,62(9):5644-5654.
[9] Lezana P, Silva C A, Rodríguez J. Zero steady state error input current controller for regenerative multilevel converters based on single-phase cells[J]. IEEE Transactions on Industrial Electronics,2007,54(2):733-740.
[10] 程佩青.数字信号处理[M].北京:清华大学出版社,2013.
[11] Teodoresu R,Blaabjerg F,Borup U.A new control structure for grid-connected LCL PV inverters with zero steady-state error and selective harmonic compensation [C].Anaheim California:IEEE APSC2004,2004.
A Motor and Its Control System for Scanning High-frequency Ultrasound Probe
With organs on the body surface as the main application of very high frequency ultrasound, sector scan ultrasonic on the organization of the incident angle in the imaging plane distribution is extremely uneven, leading to a serious decline in the imaging quality of image edge. In this paper, a voice coil motor and its servo control system are proposed for the linear scan of the high frequency ultrasonic probe. The servo system uses STM32F103 as the main control chip and the photoelectric encoder as the position sensor, and adopts the PD algorithm for PWM drive voltage regulation. The appropriate control parameters are selected based on the system simulation and experiment. The experimental results show that the motor and its control system have the advantages of simple structure and high precision, which meets the requirements of ultrasonic imaging.
voice coil motor; servo system; high-frequency ultrasound; linear scanning
2015- 12- 29
邹艳荣(1989 -),女,硕士研究生。研究方向:医学电子仪器。
10.16180/j.cnki.issn1007-7820.2016.10.032
TN256
A
1007-7820(2016)10-111-04
猜你喜欢
网络安全与数据管理(2022年1期)2022-08-29
现代仪器与医疗(2021年1期)2021-06-09
微特电机(2020年7期)2020-07-28
微特电机(2020年3期)2020-03-24
液压与气动(2019年9期)2019-09-17
微特电机(2018年9期)2018-09-28
制造技术与机床(2017年7期)2018-01-19
西安工程大学学报(2016年6期)2017-01-15
山东工业技术(2016年22期)2016-02-02
探测与控制学报(2015年4期)2015-12-15