基于投影图像识别的太阳光跟踪技术
2016-11-12 16:20高高峰宋高荣肖高雄
温州职业技术学院学报 2016年3期
高高峰,宋高荣,肖高雄
(1.温州职业技术学院 机械工程系,浙江 温州 325035;2.九江职业技术学院 船舶工程学院,江西 九江 332007)
基于投影图像识别的太阳光跟踪技术
高高峰1,宋高荣1,肖高雄2
(1.温州职业技术学院 机械工程系,浙江 温州 325035;2.九江职业技术学院 船舶工程学院,江西 九江 332007)
为保证太阳光实时垂直照射太阳能接收板,提高太阳能利用率,提出基于投影图像识别的太阳光跟踪技术。通过物体投影图像的轮廓识别,获得投影图形的几何参数,并以此计算太阳光的入射角度,采用当前通用的双轴跟踪方式,以太阳光为数据基础,实现太阳光实时跟踪的目的。追光精度分析表明,该技术具有较高的跟踪精度,可满足实际需要。
太阳光跟踪技术;图像识别;双轴跟踪;新能源
0 引 言
为解决传统能源有限的问题,同时考虑到生态环境的保护,世界各国正努力开展对可持续清洁新能源如太阳能发电等的开发和利用。传统的太阳能接收方法是把太阳光收集器放在一个固定的支架上,朝向固定,因而无法保证太阳光始终垂直照射太阳光收集器,接收效率较低。相关研究表明,与太阳光非跟踪设备相比,太阳光跟踪设备能使太阳能接受效率提高37.7%[1]。可见,太阳光的精确跟踪对于提高光电转换效率有很大帮助。
经过多年研究与实践,太阳光跟踪技术获得较大发展,其跟踪效果不断提高,但在实际工程应用中,现有太阳光跟踪技术存在成本高、跟踪精度不能保证等弊端[2],不能充分满足实际需要。探索太阳光跟踪技术,并使其达到实际应用需要,对太阳能开发利用工程具有重要的现实意义。当前图形识别技术趋于成熟,但在通过识别投影图形跟踪太阳光方面未得到应用,缺乏相关研究。本文根据投影原理,提出基于图像识别的太阳光跟踪技术,以期在太阳光精确跟踪方面取得较为理想的结果。
1 图像识别追光方法
1.1 图像识别追光原理
根据投影原理,太阳光线以不同角度照射不可透光物体时,在投影面上可得到不同形状的投影。若不可透光物体的形状为圆形,此时在投影面上可得到直线、椭圆和圆形三种不同形状的投影图像,投影形状与太阳光线入射角度存在一一对应的关系,如图1所示。根据一一对应的关系,以投影图像识别的几何参数为依据,计算太阳光相对于物体的角度,从而实现对太阳光的精确跟踪。
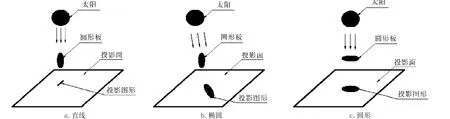
图1 不同角度入射光线所得投影形状
1.2 太阳光入射角度的计算
将投影面模拟太阳能接收板,在投影面上固定放置不可透光的圆形板,圆形板与投影面保持垂直关系。当太阳光处于A点位置时,光线斜射圆形板,投影面上得到椭圆形投影,如图2所示。

图2 光线斜射物体的投影形状
以图2为例,建立空间坐标系XYZ,原点O为圆形板与投影面的交点处。此时,太阳光与物体的水平夹角为α,高度夹角为β[3]。
水平夹角α计算公式为:

其中,b为椭圆投影的短轴长度,d为圆形板的直径。
高度夹角β计算公式为:

其中a为椭圆投影的长轴长度。
1.3 投影图形的处理
(1)投影图像的获得。采集图像使用微型相机设备,为800万像素。在采集图像时,以白色A4纸作为背景,为后期提取投影图像目标提供方便。相机获取的图像为真彩图(见图3),每个像素由3个大小相同的二维数组表示,无法直接运用图像处理算法,需要对其进行灰度处理[4]。
图3 原始图像
采用matlab内置灰度处理函数进行图像的灰度处理。灰度处理后,图像由一个二位数组表示图形,每个像素在matlab中对应一个像素值,但仍未能对图像目标进行提取,需要对其进行二值化处理[5]。图像的二值化处理使整个图像呈现出明显的黑白效果,进一步凸显目标的轮廓,减少图像的数据量,提高数据处理速度,有利于图像的进一步处理。二值化处理后的图像如图4所示。
(2)几何参数的识别。太阳光入射角度的计算需要得知椭圆投影的长轴长度和短轴长度两个数据。采用外接最小矩形获取以上两个参数,其计算原理如下:将二值化处理后的图像以每次1°的增量在90°范围内逆时针旋转;每旋转一次,得到椭圆边缘x轴方向的最大值a1与最小值b1,y轴方向的最大值a2与最小值b2;坐标点(a1,a2)为外接矩形的某个端点,对角端点为(b1,b2),以此计算外接矩形的面积;当椭圆旋转到某一角度时,椭圆对称轴与坐标轴平行,此时外接矩形的面积为最小;最小外接矩形的长边为椭圆的长轴,短边为椭圆的短轴。几何参数识别如图5所示。
图4 二值化处理后的图像

图5 几何参数的识别
2 系统机械结构设计
几何参数的识别为太阳能接收板的朝向提供依据,采用当前通用的双轴跟踪方式,设计相应的机械结构,实现太阳光的精确跟踪[6-7]。太阳光跟踪装置如图6所示。
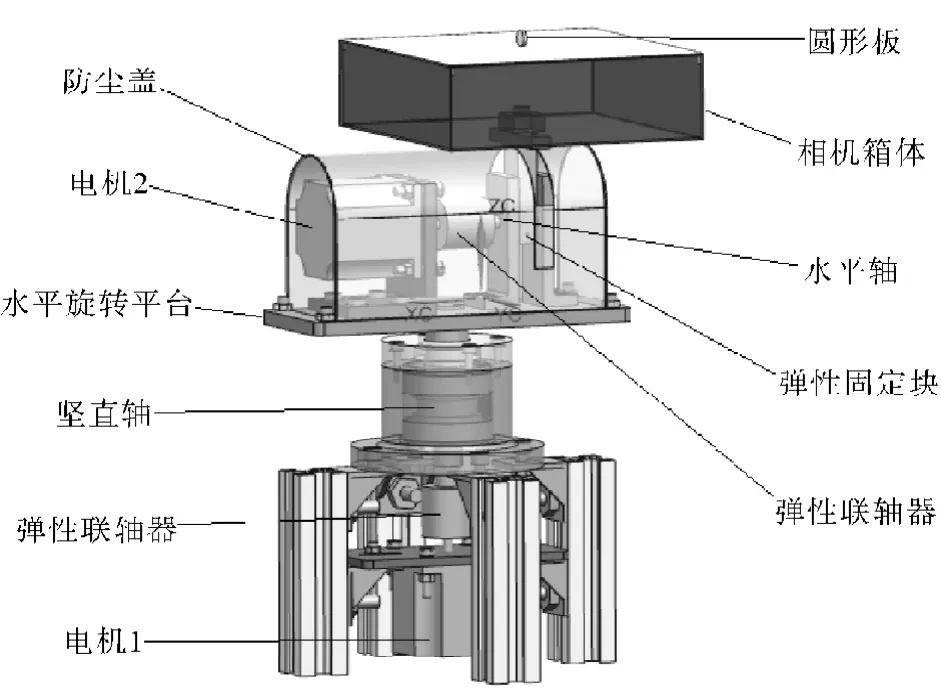
图6 太阳光跟踪装置
空间坐标系的Z轴与电机1的输出轴轴线重合,X轴与电机2的输出轴轴线重合。电机1通过弹性联轴器带动竖直轴转动,水平旋转平台通过平键与竖直轴联接,从而实现旋转运动,平台上的零件随着水平旋转平台进行水平转动,其转动范围为0°~360°。电机2与水平轴通过弹性联轴器联接,弹性固定块通过螺纹夹紧在水平轴上,随水平轴的旋转而运动。相机箱体与弹性固定块通过螺纹实现固定联接,底部中心放置微型相机。微型相机采集圆形板的投影图像,并通过无线传输给相应的计算机,计算机识别投影图形,得到太阳光线的入射角度,指导电机1、电机2工作,从而保证太阳光的实时跟踪。防尘盖上布置限位传感器,限制箱体转动的角度,保证相机箱体在-85°~+85°范围内转动,避免相机箱体与其他零件发生碰撞。
3 系统控制软件设计
利用VB编程语言编制软件界面,如图7所示。系统控制由图像采集、图像识别、控制电机工作三大功能模块组成,如图8所示。图像采集功能完成微型相机的图像拍摄,并传送给计算机。图像识别功能获取几何参数的matlab程序(.M)编译为动态链接库(.DLL),VB在代码中调用生成的.DLL中的函数,实现算法,从而脱离matlab环境使用。控制电机工作功能根据计算所得的投影几何参数,控制电机1、电机2工作。
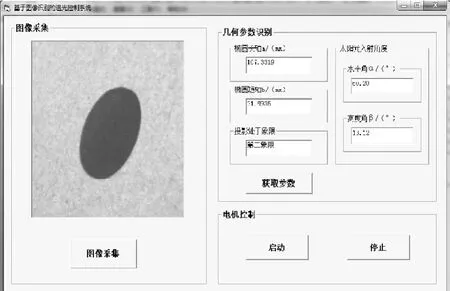
图7 系统软件界面
太阳光以不同水平角度斜射圆形板,投影图像在投影面上会处于不同位置,如图9所示。根据投影位置的情况,计算机控制电机1、电机2旋转不同的方向与角度(见表1)。
4 追光精度分析
给出太阳光线实际高度角和水平角的标准值,与本文提出的太阳光跟踪技术计算结果进行比较,结果表明,实际高度角、水平角与计算结果的高度角、水平角的误差在5°以内(见表2)。相关文献表明,当太阳光跟踪设备的法线与太阳光线的夹角在15°以内时,对太阳光的利用效率变化不明显[8]。因此,误差5°以内可满足现实需求,能实现太阳光实时跟踪的目的。
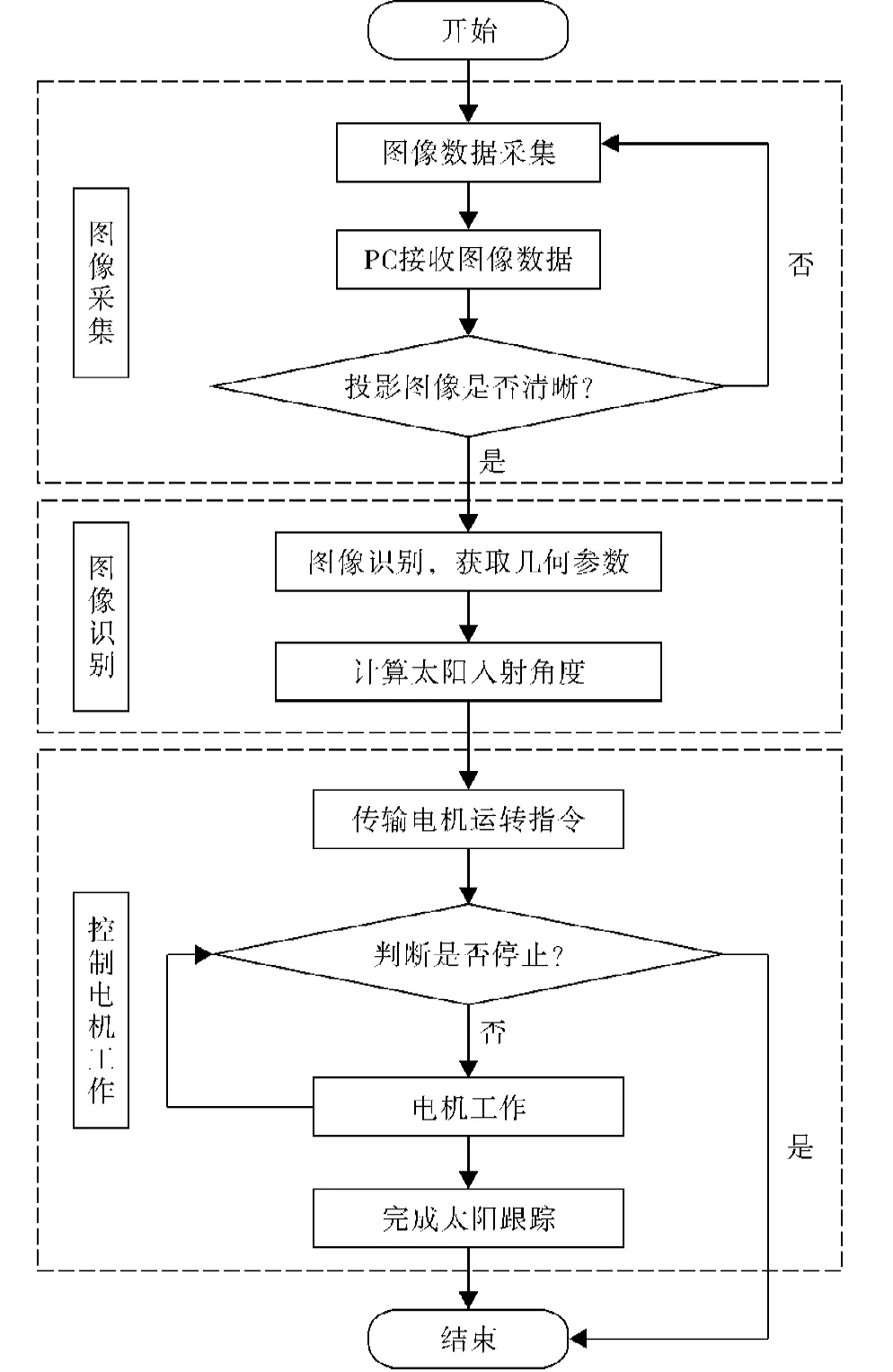
图8 系统控制流程
5 结束语
本文基于图像识别技术,提取椭圆投影的轮廓数据,采用最小外接四边形算法获得投影图形的几何参数;以几何参数为依据,计算太阳光的入射角度;系统机械结构,采用双轴跟踪方式,实现太阳能接收板的任意朝向;系统控制软件,以太阳光为数据基础,控制电机的旋转方向与角度。追光精度分析表明,该技术具有较高的跟踪精度,可满足实际需要,有效提高太阳能利用率。

图9 不同象限的投影图形

表1 电机旋转不同的方向与角度

表2 追光精度比较结果 °
[1]王小鑫,胡红利,王博.高精度太阳能跟踪控制器[J].电光与控制,2012,19(12):80-83.
[2]GIBSON T L,KELLY N A.Solar Photovoltaic Charging of Lithium-ion Batteries[J].Journal of Power Sources,20l0,195(12,S1):3928-3932.
[3]饶鹏,孙胜利,叶虎勇.两维程控太阳跟踪器控制系统的研制[J].控制工程,2004,11(5):542-545.
[4]邹益民,汪渤.一种基于最小二乘的不完整椭圆拟合算法[J].仪器仪表学报,2006,27(7):808-812.
[5]姜颖韬.智能探测小车图像识别模块设计[J].温州职业技术学院学报,2014,14(4):49-51.
[6]陈丽娟,周鑫.基于ARM嵌入式图像处理平台的太阳跟踪系统[J].现代电子技术,2012,35(4):71-74.
[7]史旺旺,刘超.用光电池旋转方法测量太阳光入射角的研究[J].可再生能源,2013,31(1):9-12.
[8]杨鹏,史旺旺,刘松,等.基于太阳电池的大范围太阳光入射角测量方法研究[J].太阳能学报,2011,32(2):216-219.
[责任编辑:乔维德]
Sunlight Tracking Technique Based on Projected Image Identification
GAO Feng1, SONG Rong1, XIAO Xiong2(1.Mechanical Engineering Department, Wenzhou Vocational & Technical College, Wenzhou, 325035, China;2.School of Shipbuilding Engineering, Jiujiang Vocational and Technical College, Jiujiang, 332007, China)
Sunlight tracking technique based on projected image identification is suggested with the purpose of ensuring that sunlight can vertically beat down on dash receivers all the time so as to make a better use of solar energy.By means of contour identification of projected images, geometrical parameters of the projected images can be obtained by which we can figure out the incident angle of sunlight.With the sunlight data, the widely-used biaxial tracking mode is employed to achieve the final aim of tracking sunlight all the time.Analysis done on sunlight tracking accuracy demonstrates that this technique is superior in high tracking accuracy and can meet the practical demand.
Sunlight tracking technique; Image identification; Biaxial tracking; New energy
10.13669/j.cnki.33-1276/z.2016.063
TK513.4
A
1671-4326(2016)03-0061-04
2016-07-03
高 峰(1989—),男,浙江瑞安人,温州职业技术学院机械工程系助教,硕士;
宋 荣(1980—),男,浙江瑞安人,温州职业技术学院机械工程系副教授,硕士;
肖 雄(1988—),男,湖北咸宁人,九江职业技术学院船舶工程学院助教,硕士.
猜你喜欢
大学物理实验(2022年6期)2022-03-03
小天使·一年级语数英综合(2021年8期)2021-08-17
教育周报·教研版(2021年14期)2021-06-20
现代职业教育·高职高专(2020年3期)2020-08-16
中学数学研究(广东)(2019年12期)2019-07-18
弹箭与制导学报(2018年3期)2018-08-28
建筑工程技术与设计(2015年19期)2015-10-21
少年科学(2015年6期)2015-07-01
中国教育技术装备(2014年20期)2014-04-28
科技视界(2012年8期)2012-08-15