水稻秧盘起盘机履带式行走机构的设计
2016-11-12 04:58:14李杨汪春张欣悦李春宝于波
黑龙江八一农垦大学学报 2016年2期
李杨,汪春,张欣悦,李春宝,于波
(1.黑龙江八一农垦大学工程学院,大庆 163319,2.牡丹江管局云山农场,3.牡丹江管局八五○农场)
水稻秧盘起盘机履带式行走机构的设计
李杨1,汪春1,张欣悦1,李春宝2,于波3
(1.黑龙江八一农垦大学工程学院,大庆163319,2.牡丹江管局云山农场,3.牡丹江管局八五○农场)
根据履带式行走机构行走的特点,结合水稻秧盘摆放的地面条件和农用机械的实际工作环境,对履带式行走机构的关键部件进行设计,以及对其各部分参数进行分析研究。通过分析研究,确定行走装置具有良好的通过性,找到合理的履带的接地长度和宽度使其对履带式行走机构的直线行走性能不产生影响,从而为水稻秧盘起盘机的履带式行走机构设计提供了参考依据。
设计;水稻;履带式行走机构;履带
履带式行走机构具有接地面积大、接地比压小、附着性好以及通过性良好等优点,适用于复杂的路面环境,履带式行走机构多用于工程机械和农业机械上,工作环境相对恶劣,要求机构具有良好的性能[1]。我校研制一种新型水稻植质钵育秧盘,用于代替塑料秧盘,可培育出优质稻苗,移栽无需缓苗等优点[2]。现针对水稻秧盘摆放所在的温室内的具体环境,设计一种适合大棚温室内环境使用的履带式行走机构。
1 履带式行走机构的总体设计
1.1总体设计
履带式行走机构一般由履带、驱动轮、导向轮、支重轮、托带轮和张紧装置构成。履带与其所绕过的驱动轮、导向轮、支重轮和张紧轮组成所谓的“四轮一带”[3]。履带式行走机构由连接回转支承装置的行走支架通过支重轮和履带将载荷传至地面,履带封闭环绕过驱动轮和导向轮。当履带由于磨损而延长时可由张紧装置调整其松紧度[4],机构如图1所示。
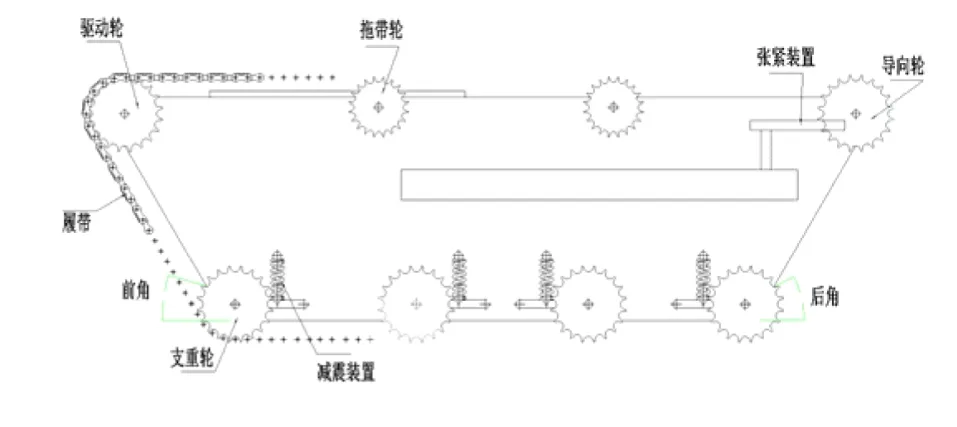
图1 履带式行走机构示意图Fig.1Schematic diagram of crawler running gear
1.2行走机构的设计
根据温室内的实际环境,履带行走机构的结构参数为:
(1)整机质量G≤1 kN
(2)驱动功率P≤0.5 kW
(3)最大行进速度VMAX≥1 km·h-1
(4)由于温室内的土壤潮湿,所以要保证平均接地比压不超过2.5 kPa[5]。
金属履带的突出优点是:牵引力大,适合重负荷作业,接地比压小,对农业地面压实、破坏程度轻,特别适合潮湿地的作业。主要适用于农业机械、工程机械和运输车辆等的行走部分[6]。机身质量为35 kg,选择金属履带的总条数为2条。
1.3主要参数的确定
接地压力为整车质量除以履带接地面积,此指标为履带行走机构设计总体参数选择的依据[7]。按照设计的要求,确定合理的配合参数:地面与履带的接触长L、宽b、带轮导轨距离B,使得机构平均接地比压、附着性能等指标满足要求。该机构的重量和工作负载通过履带接触传至地面,机构的重量和地面接地比压决定了履带的数量和总接触面积A,机械的通过性是由接地比压所决定的。根据机构工作环境,查取行走装置平均接地比压值P=2.5 Pa,总接地面积:A

式中L—行走机构履带接地长度(m)
G—机体的重力(kN)
b—履带的宽度(m)
由公式可得

机构履带与地面接触的长度L与带轮轨距B的比值直接影响履带式行走机构的行走轨迹。如果L/B>1.7,履带行走装置很难转向;如果L/B<1,则机构的直线行走能力较差,必须频繁地转向,由于水稻秧盘的摆放要求都在同一直线上,故取L/B=1.7根据设计方案,履带轨距为0.7 m,所以L=0.7×1.3= 0.91。又由经验公式得b/L=0.18~0.22取b/L= 0.2,b=0.2×L=0.182 m[8]。
根据节距P与机器重力G的关系,即:

查找相关资料,经分析可确定履带的类型如表1所示。

表1 履带类型参数表Table 1Parameter table of track type
1.4驱动轮
行走驱动力矩与驱动轮半径成正比。驱动轮半径越大,驱动力矩就越大;驱动轮半径小,驱动力矩也变小[9]。从提高动力和减少能量损失的角度考虑,驱动轮半径应尽量缩小。但驱动轮半径不能过小,因为驱动轮半径过小会使履带的弯曲应力增大,履带弯曲直径越小,应力越大,会影响履带寿命。因此驱动轮的齿数应大于等于7,为延长使用寿命工作时需使驱动轮每个齿都依次与节销啮合,由此驱动轮的齿数和履带的节销数应互为质数。
驱动轮安置在前端,为前驱动;也可以安置在后端,为后驱动。采用驱动轮后置方式的优点是:履带受力大的区段短,延长了履带的使用寿命,且不易造成履带下部起拱。
1.5导向轮
导向轮的前后位置根据驱动轮位置而定,通常布置在前面。导向轮用于引导履带正确绕转,可以防止跑偏和越轨,导向轮中心离地面高度应有利于降低重心。本设计选择导向轮前置,其直径比驱动轮直径略小,即:D/Dk=0.8~0.9,取Dk=0.12 m,当机器后退时导向轮承受2倍的牵引力,即支重轮应该能承受不小于2倍的最大牵引力径向载荷[10]。
1.6支重轮
按压力传递的情况考虑,支重轮分为多支点和少支点两种。所设计的行走机构根据路面的状况分析后,采用多支点的履带行走装置,使得装置适用于温室内的潮湿不平土路,平均接地比压小,支重轮的直径小,数量多,距离近,压力分配更均匀。履带内支重轮与履带链条相配合,支重轮的排列应规则合理,防止支重轮在履带上左右滚动,否则会直接影响履带式行走机构的行走平稳性,增大机器的行走阻力。因此,支重轮的排列应保证行走平稳性,两支重轮间的距离s一般为1.5 p,2.5 p或3.5 p,不能是2 p或3 p。目的是为了保证行走装置在行走时都能有支重轮作用在履带链条上,尽量避免机器在不平路面上行走时的起伏,保证机构在行走时的平稳性,减小阻力。为减小支重轮滚动阻力,其数量不易过多,每边支重轮的个数通常是3~5个。支重轮的工作条件比较恶劣,经常工作于尘土中,偶尔也工作于泥水中,所以为防止泥沙随着轴承的转动带入轴承中,支重轮轴承加装两个背对背的油封密封,可以有效的防止润滑油泄露,又能防止泥沙的侵入。
由于履带式底盘行走于温室内地面,地面凹凸不平会产生震动,需要加装减震装置,采用S形仿形减震轴如图2。

图2 履带式行走机构减震器示意图Fig.2Schematic of damper crawler on running gear
1.7拖带轮
拖带轮是用来托住履带,定位履带,防止履带左右摆动,减小履带侧向滑落几率,防止履带上下震动,上下的震动会让履带受到拉应力导致两侧的驱动轮和支重轮的轴受拉变形。拖带轮的作用与支重轮的作用大致相同,但拖带轮所承受的载荷相对于支重轮所承受的载荷较小,所以尺寸比支重轮尺寸小。拖带轮处于驱动轮与导向轮之间,一般为每边1~2个[11]。考虑减小震动和防止履带的侧向滑落,确定拖带轮个数为每边2个。
1.8履带的前角和后角
前轮高度影响车辆跨越垂直障碍的能力,后轮高度影响车辆爬坡能力。车辆处于水平地面时,驱动轮与行走机构前部第一个支重轮之间的履带的延长线与水平地面之间的夹角为前角,这个角度是影响行走机构行走的一个重要因素。前角增大使履带的接地长度变长,有效的减小接地压力;但前轮驱动时前角增大,履带链条孔与驱动轮啮合的齿数就变少,齿数的较少造成履带铁齿和驱动轮的轮齿受力增大,随之造成驱动轮和履带的磨损加重,影响其使用寿命。
1.9电动机的选择
履带式行走装置在行进过程中需要充足的动力,并且履带式行走机构用于高载荷的作业,所以选用电机必须具备过载保护能力,电机的传动采用双侧电机传动方案。试验动力装置选用12 V电机,转速为960 r·min-1直流电机,并配有减速比为1∶4减速器,该电机及配套减速器具备动作灵敏可靠、调速性能好、小带轮与大带轮间采用开口式连接,大带轮直径D=50 mm,小带轮d=30 mm,小带轮转速可根据公式:

式中:n为小带轮转速;r为小带轮半径。由公式可求出小带轮转速n=230~250 r·min-1,满足电机转速要求。
1.10电源的选择
水稻秧盘履带式起盘机的工作地点为水稻育秧大棚,受地理条件和机器用电的限制,试验采用电源为12 V便携式蓄电池,具有体积小、安装简便、操作简单等特点,并能够满足水稻秧盘摆放机的动力要求。
2 行走系统的参数确定
通过计算与分析,最终确定行走机构为2条金属链条履带,多支点,支撑轮与履带架为刚性连接。其参数如表2所示。
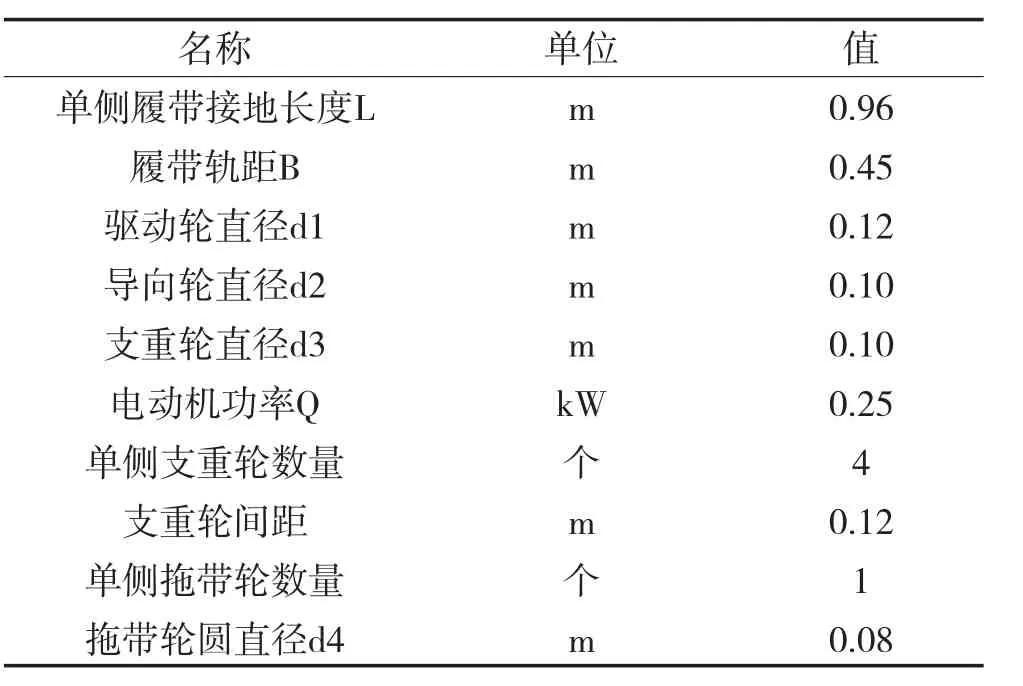
表2 行走机构系统参数Table 2System parameters of travel agency
3 结论
以农业机械的实际工作环境为背景,对履带式
行走机构的关键部件的设计以及参数的确定等问题进行了分析研究。通过对履带式行走机构的设计,总结了农业机械履带式行走机构设计应遵循的原则,就履带在水平面内的接地长度、履带宽度和轨距以及驱动轮、导向轮、支重轮设计方法和注意事项进行分析,保证了平均接地比压不大于允许值,确定了行走装置具有良好的通过性,同时考虑履带宽度和接地长度取值不会影响转向性能和整机尺寸,为农业用履带式行走机构的设计提供了参考依据。
[1]顾建清,戴鼎,顾菊根,等. 机插水稻大棚育秧技术试验与研究[J]. 中国农机化,2011(3):97-100.
[2]刘鑫,汪春.基于SolidWorks的水稻育秧土混拌机混拌筒虚拟样机设计及有限元仿真研究[J]. 黑龙江八一农垦大学学报,2014,26(5):31-34.
[3]赵瑜,闫宏伟.履带式行走机构设计分析和研究[J]. 新技术新工艺,2010,11(5):50-53.
[4]孙振杰,刘俊峰,李彩风,等. 微型农用履带式行走装置的设计方法[J]. 农机化研究,2011,24(10):55-58.
[5]刘彤,许纯新. 橡胶履带车辆接地压力分布[J]. 工程机械,1995(5):11-18.
[6]陈媛媛. 履带车辆行动系统动力学仿真分析[D].沈阳:沈阳理工大学,2012.
[7]赵文生. 履带式行走机构设计分析[J]. 湖北农机化,2010(11):56-58
[8]徐锡晨. 履带式小型甘蔗收割机底盘和钢架设计与分析[D].广西:广西大学,2006.
[9]杨春海. 掘进机履带式行走机构的研究[J]. 科学之友:B版,2008(7):1-2.
[10]吉洋. 林用履带机器人底盘设计与仿真分析[D].北京:北京林业大学,2013.
[11]李连豪,张伟,汪春,等. 水稻植质钵盘高强度结构设计与性能试验[J]. 农业机械学报,2014,45(11):88-97.
Design Crawler Travel Mechanism of Rice Yangpan Plate Machine
Li Yang1,Wang Chun1,Zhang Xinyue1,Li Chunbao2,Yu Bo3
(1.College of Engineering,Heilongjiang Bayi Agricultural University,Daqing 163319;2.Yunshan Farm of Mudanjiang Management Bureau;3.850 Farm of Mudanjiang Management Bureau)
According to the characteristics of crawler travel device and combined with the placing conditions of paddy seedling on trays and the real conditions of agricultural machine,the crawler travel device and it's key components were designed,and the various parts of its parameters were analyzed.Through analysis and research,the walking device was determined to have a good passing ability,and the reasonable length and width of the ground track were found out to have no effects on the behavior of straight line walking of crawler travel device.This research provided some reference for seedling tray from the crawler travel device.
design;rice;crawler walking mechanism;caterpillar
S223.1
A
1002-2090(2016)02-0090-03
10.3969/j.issn.1002-2090.2016.02.018
2015-04-15
李杨(1988-),男,黑龙江八一农垦大学工程学院2012级硕士研究生。
汪春,男,教授,博士研究生导师,E-mail:Ewangchun1963@126.com。
猜你喜欢
汽车实用技术(2022年5期)2022-04-02 09:36:40
汽车实用技术(2022年5期)2022-04-02 09:36:20
农业装备与车辆工程(2021年8期)2021-08-28 09:49:16
江苏农业科学(2021年10期)2021-07-01 10:13:06
装备制造技术(2020年9期)2021-01-26 00:15:08
南方农机(2021年1期)2021-01-20 11:41:46
港口装卸(2020年3期)2020-06-30 10:37:54
中国新技术新产品(2020年4期)2020-05-05 15:49:48
新农民(2019年36期)2019-02-20 04:12:07
农业机械学报(2018年6期)2018-07-05 11:38:18