基于三轴加速度计的车身姿态测量与解算
2016-11-10 07:59:30王京,马峻,田耘
实验技术与管理 2016年10期
王 京, 马 峻, 田 耘
(北京电子科技职业学院 汽车制造技术系, 北京 100176)
基于三轴加速度计的车身姿态测量与解算
王京, 马峻, 田耘
(北京电子科技职业学院 汽车制造技术系, 北京100176)
随着微机械电子系统的发展,车身姿态测量多采用惯性传感器为基础的捷联式测量,但由于陀螺仪产生的漂移和误差难以消除,采用三轴加速度计进行测量,再对车身姿态解算。算法采用改进的遗传神经网络算法,即以神经网络算法为基础,采用进退搜索算法加强遗传算法的收敛速度,进而优化权值与阈值选取,加快结果的输出。经过实验对比,该方法能够实现车身姿态的实时输出,算法精度符合要求。
车身姿态; 三轴加速度计; BP神经网络算法
新技术的应用离不开对于汽车车身姿态的测量与感知,尤其是在乘用车整车的姿态测量与控制是一个非常重要的方面。最初的姿态测量仅仅是以路面作为参考,通过底盘悬挂高度确定姿态,这种方法不能反映车身姿态的实际结果,对驾驶的帮助有限。随着微机械电子系统(MEMS)的发展,车身姿态测量摆脱了传统机械平台的限制,实现了捷联式的测量平台。惯性传感器姿态测量系统就是一种捷联式的车身测量系统。该系统[1-3]由惯性加速度计和陀螺仪组成,利用直接采集到的运动学信息,并根据导航系统理论完成运动目标的姿态测量。但由于陀螺仪在测量过程中随时间、温度等条件的变化会使机械转子产生漂移,系统累积误差难以消除[4],因此需要采用若干个惯性加速度计[5],再利用欧拉法、方向余弦法或四元数法等数学方法解算出姿态角,该过程计算复杂,很难做到实时输出。本文利用三轴加速度计测量并使用人工神经网络的算法进行车身姿态解算,但由于单纯的神经网络算法全局搜索能力差、收敛速度慢,容易陷入局部极值,因此采用遗传算法对人工神经网络进行改进,并采用进退搜索算法加强遗传算法的收敛速度。
1 坐标系的建立与换算
导航中常用的坐标系有地心惯性坐标系(i 系)、地球坐标系(e 系)、机体坐标系(b 系)、导航坐标系(n 系)和平台坐标系(p 系)5种[6]。车身姿态测量一般采用机体坐标系(设为O-XbYbZb)和平台坐标系(设为O-XpYpZp)。机体坐标系是以汽车重心作为原点,Xb轴平行于汽车的横切面指向汽车右侧,Yb轴平行于汽车纵切面指向前,Zb轴垂直于汽车横切面竖直向上。平台坐标系固定于车身,原点与机体坐标系重合,三轴随车身姿态变化而变化,坐标系见图1。图1中θ为俯仰角,即Zp轴和XbOZb面之间的夹角;γ为汽车的横滚角,即Xp轴与XbOYb面之间的夹角;φ为航向角,即Yp轴与YbOZb面之间的夹角。俯仰角θ和横滚角γ对汽车乘坐的舒适性能影响较大[7],车身姿态测量中主要考虑这2个角度的测量。
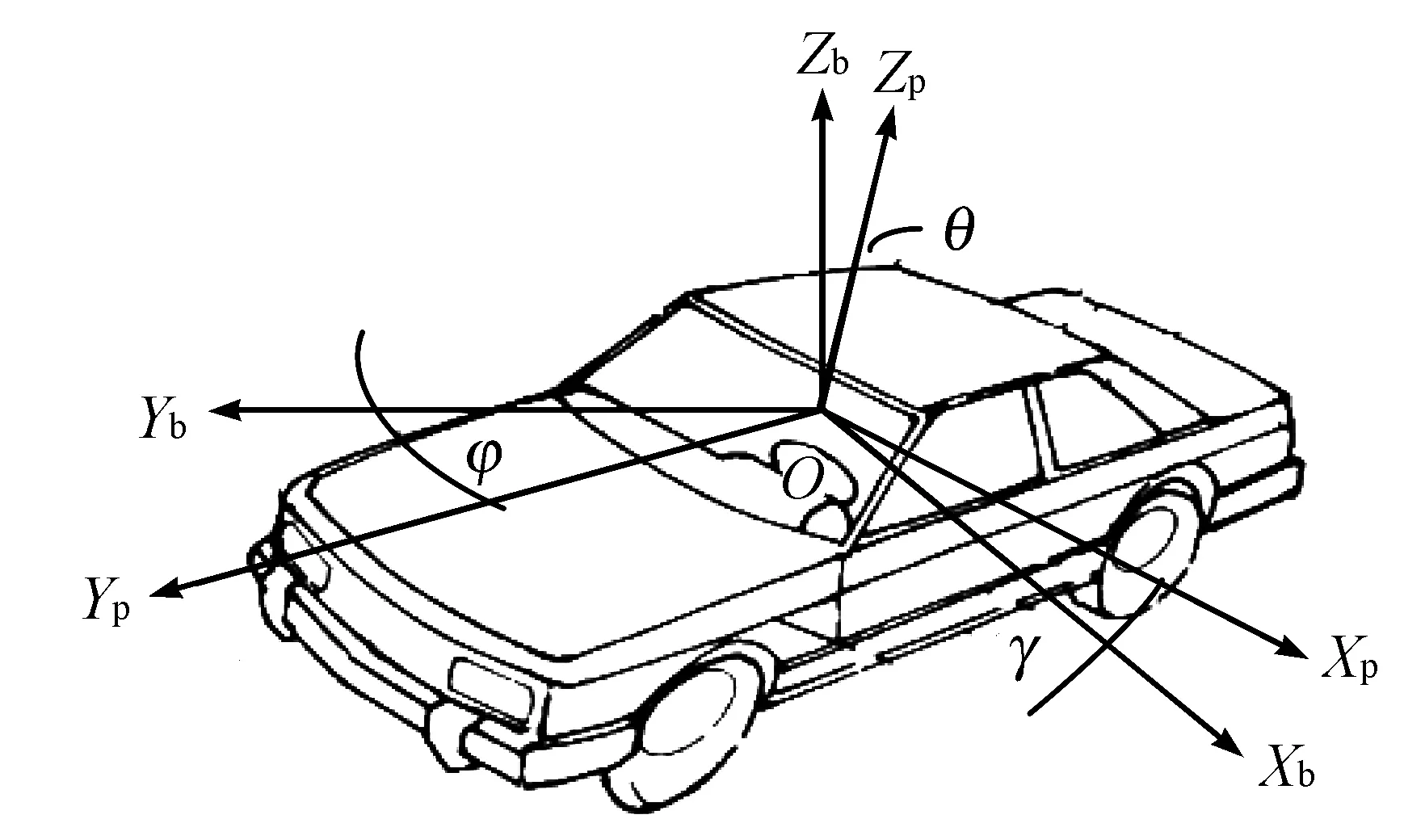
图1 坐标系

(1)
则车身任意点坐标变换公式为
(2)
三轴加速度计是测量汽车运行中受合外力影响加速度的变化。在静止或匀速运动时,其反映的是当地的重力加速度g。加速度在3个坐标轴的分量ax、ay、az可以表示为
(3)
由式(1)—(3)可得θ和γ:
2 改进遗传BP神经网络算法
汽车运行中,三轴加速度计的数据换算到姿态角的过程是个非线性时变函数,难以用精确的数学模型进行描述,因此传统方法中“数学模型—算法设计—算法实现”的步骤无法实现。故本文拟采用BP神经网络算法为基础,利用BP神经网络算法逼近任意非线性函数的能力,来模拟实际系统的输入输出关系。但单纯的BP神经网络算法容易陷入局部极小值,此外对初始权值具有较强的依赖性。将遗传算法与BP 算法融合是有效方法之一,它充分利用了遗传算法的全局搜索能力和 BP神经网络算法的局部搜索能力,克服了BP神经网络算法容易陷入局部值、收敛速度慢的缺点[8]。但遗传算法在迭代过程中经常出现未成熟收敛、振荡、随机性太大、迭代过程缓慢等缺点[9],这也对BP神经网络的学习产生了影响。因此本文引入进退搜索算法加强遗传算法的局部搜索能力和收敛速度,构造一种改进的遗传BP神经网络算法,提高了传统遗传神经网络算法的运算效果。
改进遗传算法的基本原理见图2。在多个数据中,有多种优化算法可很快找到极值点m,但未必是全局最优点,传统遗传算法保证找到全局最优点,但需要多代遗传,运算时间较长。将进退搜索算法引入其中,先利用遗传算法进行全局搜索,确定a点与b点之间存在个体i,再利用进退搜索算法确定最优个体。
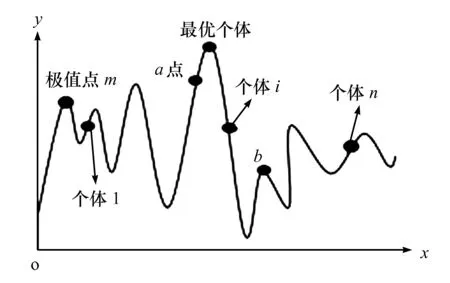
图2 改进遗传算法基本原理
利用最优个体进行BP算法中的网络权重的优化,得到优化后的权重。将优化好的初始权值和阈值代入神经网络,通过选择、交叉和变异操作找到最优适应度值对应的个体,进行网络误差的计算,根据计算结果对权值和阈值的修改,最终达到要求的精度,输出结果。其算法流程图见图3。具体计算步骤如下:

图3 改进遗传BP神经网络算法流程图
(1) 初始化种群。初始种群的个体一部分随机产生,一部分由进退搜索算法产生,这样可以提高整个群体的优良性能。
(2) 由适应度函数计算每个个体的适应度。采用输出层样本的期望输出值与实际输出值之差的平方和的倒数作为适应度函数,即
式中n为输入样本个数,m为输出层节点个数,Qef为第e个样本、第f个节点的期望输出值,Sef为第e个样本、第f个节点的实际输出值。
(3) 选择、变异、交叉计算。完成选择操作后,进行交叉、变异计算。交叉算子为
式中r为交叉概率。
变异算子为
式中Emax(t)为最大适应度的个体误差,b为变异误差。
为了更快地搜索,根据遗传特点,以较大的交叉概率(r=0.9~1)实施交叉操作,以较小的变异概率(b=0~0.5)实施变异操作。
(4) 若满足终止条件则结束搜索,确定BP神经网络的初始权值与阈值。
(5) 以三轴加速度的测量值及环境变量为输入节点(环境变量视具体情况设定,在网络训练结束后确定具体值),车身俯仰角θ和横滚角γ为输出节点。通过网络训练更改权值与阈值,直至精度达标。
3 结果分析
搭建三轴加速度计和陀螺仪实验系统后以1 000组/h数据的速度工作8 h,采集8 000组数据作为神经网络训练样本,进行神经网络的训练,直到其输出精度满足要求,确定权值与阈值并拆除陀螺仪。
一般轿车运动过程中θ<30°、γ<15°。将实验台输出值与陀螺仪测量值相比较,曲线基本吻合。其中俯仰角最大误差点出现在加速时,误差为2.89%;横滚角最大误差出现在右转时,误差为2.47%,直线运行时由于扰动较小,误差在0.5%以内,满足汽车使用标准。此外,由于改进了算法,提高了解算速度,平均延时小于0.1 s,不会影响汽车姿态的控制。
4 结论
本文基于三轴加速度传感器设计的车身姿态测量解算办法与传统的车身姿态测量相比,节约了硬件成本,解算过程中,采用了进退搜索算法与遗传算法相结合方法,改进了BP神经网络初始权值与阈值的确定,提高了BP算法的精确度和整体计算速度。结果表明,改进的遗传BP神经网络算法可靠性高、适应性强,测量精度满足能家用轿车的要求。
References)
[1] Uno Y, Kawato M, Suzuki R. Formation and control of optimal trajectory in human multijoint arm movement:Minimum torque-change model[J]. Biologocal Cybernetics,1989(61):89-101.
[2] Boonstra M, van der Slikke R, Keijsers N, et al. The accuracy of measuring the kinematics of rising from a chair with accelerometers and gyroscopes[J]. Biomech, 2006(39):354-358.
[3] Zhao J, Badler N. Inverse kinematics positioning using nonlinear programming for highly articulated figures,ACM Trans[J]. Graph, 1994,13 (4):313-336.
[4] Barbour N M. 惯性导航传感器[J]. 肖克军,刘峰,林思刚,等译.战术导弹控制技术,2009,26(4) :51-62.
[5] Hadri A E I,Benallegue A. Sliding Mode Observer to Estimate Both the Attitude and the Gyro-Biasby Using Low-Cost Sensors[C]//Conference on Intelligent Robots and Systems. USA, 2009:2867-2872.
[6] 陈哲.捷联惯导系统原理[M].北京:宇航出版社,1986.
[7] 李怡凡,吴黎明,张力锴.一种车身姿态的捷联测量[J].传感技术学报,2010,23(8):1189-1193.
[8] 黄庆斌.BP 算法的改进及其应用研究[D].成都:西南交通大学,2010.
[9] Su C T, Chiang C L. No convex power economic dis-patch by mi proved genetic algorithm with multiplier upda-tingmethod [J]. Electric Power Components and Systems,2004,32(3):257-273.
Measurement and calculation of vehicle body attitude based on tri-axial acceleration transducer
Wang Jing, Ma Jun, Tian Yun
(Department of Automobile Manufacturing Technology, Beijing Polytechnic,Beijing 100176, China)
With the development of micro mechanical-electronic system, the strap down measurement was carried out based on inertial sensor for vehicle body attitude measurement. But it is difficult to eliminate the drift and error caused by the gyro,a simple tri-axial accelerometer was used to measure and calculate the attitude of the vehicle body,an improved genetic BP neural network algorithm is used in the algorithm,the BP neural network algorithm is based on the forward and backward searching algorithm to enhance the convergence speed of genetic algorithm, optimize the weights and threshold selection, and speed up the output results. After experimental comparison,the method can realize the real time output of the vehicle body attitude,the algorithm accuracy is in line with the requirements.
vehicle body attitude; tri-axial acceleration transducer; BP neural network algorithm
10.16791/j.cnki.sjg.2016.10.011
2016-05-25
2014年度北京高等学校教育教学改革立项项目(PXM2015_014306_000017);北京电子科技职业学院科技重点课题“智能小车三轴运动姿态测量解算平台研究”(YZK2014019)
王京(1975—),女,北京,硕士,教授,研究方向为汽车制造.E-mail:wangjing100026@126.com
U467.4
A
1002-4956(2016)10-0038-03
猜你喜欢
成都信息工程大学学报(2022年3期)2022-07-21 09:35:04
中国特种设备安全(2021年5期)2021-11-06 05:09:08
烟台大学学报(自然科学与工程版)(2021年1期)2021-03-19 08:38:42
沈阳师范大学学报(教育科学版)(2021年2期)2021-02-01 07:00:46
中国惯性技术学报(2017年1期)2017-06-09 08:15:14
自动化学报(2017年7期)2017-04-18 13:41:02
光学精密工程(2016年5期)2016-11-07 09:06:41
电测与仪表(2015年15期)2015-04-12 00:43:48
河北科技大学学报(2015年5期)2015-03-11 16:16:37
中央民族大学学报(自然科学版)(2014年1期)2014-06-11 01:28:38