
基于瞬时无功型MRAS的PMSM无速度传感器控制
2016-11-08 04:45韩世东张广明梅磊戚新建孙明山
电气传动 2016年10期
韩世东,张广明,梅磊,戚新建,孙明山
(1.南京工业大学电气工程与控制科学学院,江苏 南京 211816;2.中国科学院苏州生物医学工程技术研究所,江苏 苏州 215163)
基于瞬时无功型MRAS的PMSM无速度传感器控制
韩世东1,2,张广明1,梅磊1,戚新建1,孙明山2
(1.南京工业大学电气工程与控制科学学院,江苏 南京 211816;2.中国科学院苏州生物医学工程技术研究所,江苏 苏州 215163)
研究了一种基于瞬时无功功率的MRAS永磁同步电机转速辨识系统,将PMSM瞬时无功功率作为参考模型,稳态下的无功功率作为可调模型。2个模型的输出误差,通过设计的自适应律来辨识电机转速和转子位置,利用该方案建立了永磁同步电机无速度传感器控制系统。理论分析和仿真结果均表明,该控制系统在转速和负载突变下均能准确跟踪转子的速度和空间位置,具有良好的鲁棒性和动、静态性能,同时降低了参数敏感性。
永磁同步电机;模型参考自适应;无功功率
在永磁同步电机(PMSM)中,对转子位置和速度的准确测量是保证高性能控制的前提[1],但是机械式传感器价格昂贵,对温度、湿度等周围环境比较敏感,从而降低了系统的实用性和可靠性。
目前,PMSM的无速度传感器技术大致可以分为以下几类:1)基于反电动势(Back-EMF)的方法[2];2)高频信号注入的方法[3-4];3)基于状态观测器的方法[5-7];4)基于模型参考自适应(MRAS)的技术。
文献[1,8]分别采用了不同的可调模型实现了对PMSM转速ωr和定子电阻Rs的在线估计;文献[9]改进了参考模型和可调模型,着眼于消除误差累积,并没有涉及参数敏感性问题;文献[10-12]将MRAS系统与滑模变结构控制进行了有机整合,提高了MRAS的辨识性能和鲁棒性;文献[13-14]利用MRAS和高频信号注入法各自的优点,提出了低速下采用信号注入法,中高速下采用模型参考自适应的复合电机转速估计方法。
本文提出一种基于无功功率的MRAS来估计PMSM转速和位置。系统的参考模型利用瞬时无功功率,可调模型采用稳态无功功率,大大降低了系统对参数的敏感性,估计模型仅依赖于q轴电感,而一般情况,PMSM电感的电压降误差远小于反电势,磁饱和造成的电感变化对算法的影响相对有限[15]。所以该方法对电机参数变化具有较强的鲁棒性,完全解决了电阻变化对转速估计的影响,提高了转速辨识的精度。
1 PMSM的建模及瞬时无功型与MRAS模型的选择
1.1 PMSM的数学模型
永磁同步电机在d-q轴旋转坐标系下的数学模型为

式中:ud,uq,id,iq分别为定子d,q轴的电压电流;Rs,L分别为定子电阻和电感;ωr为转子角速度;Ψd,Ψq为定子磁场在d,q轴方向上的分量,其可表示为

式中:Ψf为永磁体产生的磁链。
将式(2)代入式(1)得

1.2 MRAS参考模型和可调模型的选择
20世纪80年代,日本学者赤木泰文提出了三相瞬时无功功率的理论,我国学者为了使瞬时无功的定义更具有普遍意义,对赤木泰文的定义做了改动[16]。定义瞬时无功功率矢量Q为

矢量Q在d,q轴平面垂直方向上的投影Q即为瞬时无功功率
将式(3)代入式(5)得

在正弦稳态下式(6)可进一步化简为

由于采用id=0的矢量控制,仿真和实际运行中可验证d轴电流近似为0,于是得到瞬时无功功率新的表达为

在所有Q的表达式中,Q4无需导数的计算,且仅依赖于q轴电感,因此可选做可调模型。另外,在所有分析的瞬时无功功率Q的表达式中,Q1完全独立于电机转速、电阻、电感等敏感参数,用来做参考模型。
1.3 瞬时无功型MRAS与传统MRAS辨识方法的性能对比
传统MRAS中转速辨识算法为[1]
2 基于瞬时无功功率MRAS的速度辨识方案设计
如图1所示,模型参考自适应系统运用2个模型输出,其一独立于转速(参考模型),另一个模型必须基于转速(可调模型),两者分别运算得到的瞬时无功会产生1个误差信号,自适应算法利用该误差信号通过1个PI控制器产生自适应控制信号,最终使2个模型的输出误差为零,即可调模型的逼近真实的ωr。

图1 MRAS转速估计原理框图Fig.1 Principle block diagram of MRAS speed estimation
自适应律一般选择积分加比例的形式,对整个自适应系统的性能起着关键性的作用。所设计的自适应律如图2所示,整个系统可等效为1个由线性时不变(LTI)前馈模块和1个线性时变(LTV)反馈模块组成的等价模型。
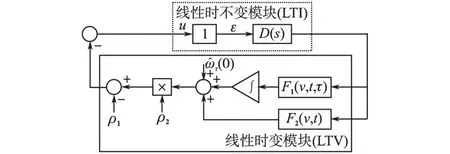
图2 系统的等效模型Fig.2 Equivalent model of the system

按照MRAS的普遍结构,ω̂r取比例加积分的形式如下式:

由图2的等价模型易知,对前馈线性定常系统的输入随着非线性时变反馈变化,并没有任何外部信号输入,所以线性时不变系统的输入u=ε,输出v=D(s)ε,可得:

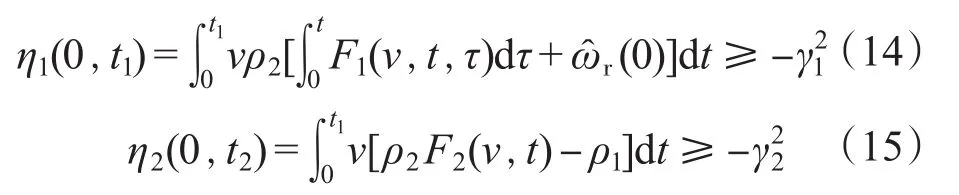
需要确定F1(v,t,τ)和F2(v,t),根据Popov超稳定理论,若系统渐近稳定,则图2所示非线性时变环节必须满足Popov不等式[17],即

其中,γ2为1个有限正数。将式(11)代入式(12)有

要使η(0,t1)≥-γ2,可分别使
对于式(14),利用如下不等式
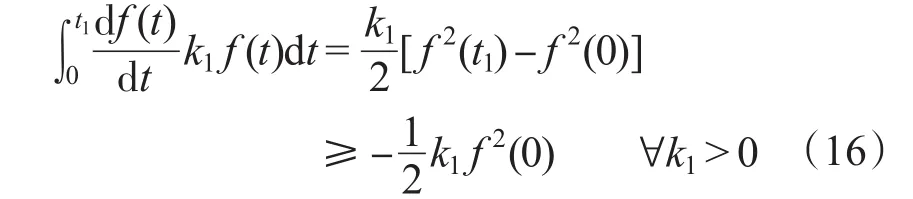
不妨设:df(t)/dt=vρ2和,解得F1(v,t,τ)=k1vρ2。
对于式(15)可令ρ2F2(v,t)-ρ1=k2v,整理得将得到的F1(v,t,τ)和F2(v,t)代入式(10),有

由式(17)可知,最终自适应律是1个带有初始值的 PI控制器,其中 kP=k2/ρ2,kI=k1ρ2,∀k1,k2>0,且kP,kI均为正。因此,基于瞬时无功型MRAS自适应律满足Popov不等式,系统渐近稳定。基于瞬时无功的模型参考自适应转速辨识系统的结构如图3所示。

图3 基于瞬时无功功率MRAS转速辨识结构Fig.3 Structure of speed identification based on instantaneous reactive power MRAS
3 仿真研究及结论
本文利用Matlab/Simulink来验证所提出的基于瞬时无功型MRAS的PMSM速度辨识算法,电机参数为:额定功率PN=1.1 kW,相电压220 V,定子电阻Rs=0.18Ω,绕组电感Ld=Lq=8.35 mH,永磁体磁链Ψf=0.106 Wb,转动惯量J=0.000 62 kg·m2,极对数p=1。图4和图5分别为系统仿真结构图和瞬时无功型MRAS的Matlab仿真模型。

图4 系统Matlab仿真模型的组成结构框图Fig.4 The structure diagram of Matlab simulation model of the whole system
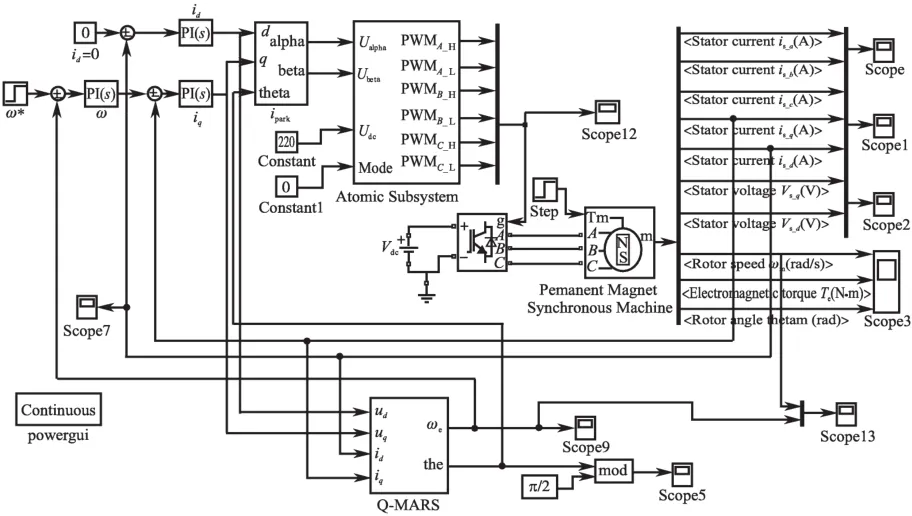
图5 瞬时无功型MRAS的Matlab仿真模型Fig.5 Matlab simulation model of instantaneous reactive power MRAS
仿真实验中,为了验证辨识算法在负载和转速突变情况下的速度跟踪性能,仿真参数设置如下:仿真时长0.3 s;t=0.1 s时,负载转矩由初始5 N·m突变为10 N·m;t=0.2 s时,转速由初始100 rad/s突变为200 rad/s。图6a给出了转速响应波形。在0.1 s负载突变后,经50 ms后转速又稳定到初始转速;0.2 s转速突然增加1倍后,经过约60 ms,转速收敛在设定转速200 rad/s;图6b是整个过程中转速误差波形,可以看出误差稳态运行时误差很小,突变时误差也控制在18 rad/s以内;图6c为相应的位置观测波形。

图6 负载扰动和转速变化时的仿真波形Fig.6 Simulation waveforms of load disturbance and speed change
由仿真实验看出,本文提出的基于瞬时无功型MRAS的速度辨识方案能够保证转速辨识和电机转子空间位置的估计,误差小,跟踪精度高,估计速度与实际速度基本重合,转速和负载的突变虽产生一定超调,但均能很快恢复,稳态误差基本为0。
本文研究了一种基于瞬时无功功率的模型参考自适应PMSM转速辨识方案,将瞬时无功功率作为参考模型,稳态下的无功功率作为可调模型。无需传统MRAS的求导运算,减少了计算时间,估计模型仅依赖q轴电感,完全解决了电阻变化对转速估计的影响,降低了系统参数敏感性。仿真结果验证了所提出的方案在转速和负载突变下均能准确跟踪转子的速度和空间位置,对参数变化具有较强的鲁棒性,提高了转速辨识的精度。
[1]郑安平,程福春,张智强.一种改进的永磁同步电机矢量控制MRAS方案[J].郑州轻工业学院学报,2014,29(4):46~49.
[2]Zhuang Xu,Rahman MF.An Adaptive Sliding Stator Flux Observer for a Direct Torque Controlled Ipm Synchronous Motor Drive[J].IEEE Transactions on Industrial Electronics,2007,54(5):2398-2406.
[3]Wang Limei,Lorenz R D.Rotor Position Estimation for Permanent Magnet Synchronous Motor Using Saliency-tracking Self-sensing Method[C]//IEEE IAS Annual Meeting,Rome,Italy,2000.
[4]秦峰,贺益康,刘毅.两种高频信号注入法的无传感器运行研究[J].中国电机工程学报,2005,25(5):116~121.
[5]Harnefors L,Hinkkanen M.Complete Stability of Reduced-order and Full Order Observers for Sensorless IM Drives[J].IEEE Transactions on Industrial Electronics,2008,55(3):1319-1329.
[6]Germano A,Parasiliti F,Tursini M.Sensorless Speed Control of a PM Synchronous Motor Drive by Kalman Filter[C]//Proceedings of International Conference on Electrical Machines(ICEM1994).Paris France:IEEE,1994:540-544.
[7]陈振,刘向东,靳永强.采用扩展卡尔曼滤波磁链观测器的永磁同步电机自接转矩控制[J].中国电机工程学报,2008,28(3):75-81.
[8]齐放,邓智泉,仇志坚,等.一种永磁同步电机无速度传感器的矢量控制[J].电工技术学报,2007,22(10):30-34.
[9]郭兴.基于改进型MRAS的永磁同步电机的转子速度辨识研究[D].长沙:湖南大学,2013.
[10]万文斌,陈鹏程,苏振东.基于MARS的永磁同步电机无速度传感器滑模控制研究[J].电气自动化,2011,33(2):7-10.
[11]王庆龙,张兴,张崇巍.永磁同步电机矢量控制双滑模模型参考自适应系统转速辨识[J].中国电机工程学报,2014,34(6):897-901.
[12]张洪宇.基于模型自适应和滑模观测器PMSM无位置传感器控制对比仿真分析[D].吉林:吉林大学,2014.
[13]秦峰,贺益康,贾洪平.基于转子位置自检测复合方法的永磁同步电机无传感器运行研究[J].中国电机工程学报,2007,27(3):12-17.
[14]李源源.永磁同步电机无速度传感器控制技术的研究[D].长沙:湖南大学,2013.
[15]王子辉.永磁同步电机全速度范围无位置传感器控制策略研究[D].杭州:浙江大学,2012.
[16]刘进军,王兆安.瞬时无功功率与传统功率理论的统一数学描述及物理意义[J].电工技术学报,1998,13(6):6-12.
[17]王成元,夏加宽,孙宜标.现代电机控制技术[M].北京:机械工业出版社,2008.
Sensorless Control of PMSM Based on Instantaneous Reactive Power MRAS
HAN Shidong1,2,ZHANG Guangming1,MEI Lei1,QI Xinjian1,SUN Mingshan2
(1.College of Electrical Engineering and Control Science,Nanjing Tech University,Nanjing 211816,Jiangsu,China;2.SIBET,Chinese Academy of Sciences,Suzhou 215163,Jiangsu,China)
Studied a speed identification system of PMSM based on the instantaneous reactive power MRAS.Instantaneous reactive power of PMSM was used as the reference model and steady-state reactive power was used as the adjustable model.The output error of the two models was used to identify the motor speed and rotor position through the design of an adaptation mechanism.The speed sensorless control system of PMSM was established by using the scheme.The simulation results show that the control system can accurately track the speed and position of the rotor under the speed and load transient change,which has good robustness,and reduces the sensitivity of the parameters.
permanent magnet synchronous motor(PMSM);model reference adaptive system;reactive power
TM464
A
10.19457/j.1001-2095.20161003
2015-08-31
修改稿日期:2016-03-21
国家自然科学基金(51277092,51307080);国家重大科学仪器设备开发专项项目(2011YQ04008206)
韩世东(1990-),男,硕士研究生,Email:han_shidong@163.com
猜你喜欢
防爆电机(2022年3期)2022-06-17
上海大中型电机(2021年2期)2021-07-21
防爆电机(2021年2期)2021-06-09
防爆电机(2020年6期)2020-12-14
中国教育信息化·基础教育(2016年12期)2017-04-15
军事运筹与系统工程(2016年3期)2016-09-26
科教导刊·电子版(2016年21期)2016-08-23
电脑知识与技术(2016年10期)2016-06-16
组合机床与自动化加工技术(2014年12期)2014-03-01
汽车电器(2014年8期)2014-02-28
