
基于滤波算法的感应电动机参数离线辨识
2016-11-08 04:45张虎孙天硕
电气传动 2016年10期
张虎,孙天硕
(北方工业大学北京市电力电子与电气传动工程研究中心,北京 100144)
基于滤波算法的感应电动机参数离线辨识
张虎,孙天硕
(北方工业大学北京市电力电子与电气传动工程研究中心,北京 100144)
感应电机的参数辨识是电机控制领域的一个重要课题,获取高质量的电机参数是构建控制系统数学模型、实现电机最优控制的重要前提。在对感应电机的等效电路进行再分析后,抓住感应电机自身电流滞后的特点,在传统电机参数辨识方法的基础上,分别进行了改进的单相交流实验、直流实验和三相交流实验,通过滤波计算,依次获取电机定子电阻、定子电感、定转子互感和转子电阻,并通过Matlab仿真和实验,验证了该离线辨识技术的准确性。
感应电动机;参数辨识;矢量控制;滤波器;PI控制
现代电机控制技术的一个突出标志就是矢量控制理论的应用,矢量控制理论的应用使得交流调速系统逐步取代了传统的直流调速系统,且逐步实现无速度传感器控制,最终将实现全新的智能化控制。但电机参数的偏差或错误,会轻而易举地使矢量控制丧失原本技术上的优势,造成系统稳态和动态性能下降,因此在现代电机控制中,电机参数的准确辨识至关重要[1-2]。
至今为止,感应电机参数辨识的方法有很多种,早期比较常用的是电机堵转实验和空载实验,但由于现场条件的限制,而且测得的参数误差大,现在已不采用;后来随着电机物理模型的不断明晰,以及数值分析、系统辨识等学科的发展,产生了递推最小二乘法,其作为一种回归估计方法,算法简单计算量小,多用于在线辨识,但此方法对测量噪声和转速的波动都很敏感,因此还有很多需要改进的地方[3-6];还有扩展卡尔曼滤波法,此种方法计算量比较大,耗时长,且计算初值的选取严重影响辨识的收敛速度与准确度[7];最后就是最近兴起的人工智能方法,例如遗传算法、人工神经网络、模糊逻辑控制等,但多还处于理论层面[8-11]。
鉴于以上这些参数辨识方法的缺陷,本文在文献[12-16]的基础上,深入分析感应电机的基本电路模型,从其数学表达式入手,结合滤波器的巧妙使用,得到一种新的离线辨识技术。这种辨识技术是基于滤波算法的实现途径,使得辨识过程计算量小,且选用的是一阶低通滤波器,收敛快,便于编程实现,只需测量电机定子侧相电流作为反馈量,通用性强、实用可靠。
1 基于电路模型分析
对于三相感应电动机,通常用图1所示T形等效电路来分析正弦稳态下的运行问题[1,12-14]。图中U,I分别为电机定子侧a相电压和电流;Rs,Lls分别为定子侧电阻和漏感;Rr,Llr分别为等效到定子侧的转子电阻和转子漏感;Lm为励磁电感。

图1 感应电机T型等效电路Fig.1 T equivalent circuit of induction motor
当输入正弦激励时,由等效电路求得总阻抗为

并联支路阻抗为

又Lr=Llr+Lm,经简化

将式(3)实部、虚部分开来看,得总电阻为

总电抗为

进而总漏感为

式中:Req,Leq分别为单相总电阻和总漏感;Ls, Lr分别为定转子电感;φ为a相电压与电流的相位差;ω为激励的角频率;σ为漏磁系数,
当输入直流激励时,图1中电感被短路,等效电路变为纯电阻电路,可求得定子电阻Rs为

2 辨识原理分析
图2为辨识原理框图,基于该框架,本文分3个试验依次获取电机5个参数:定子电阻、定子电感、转子电感、定转子互感和转子电阻。首先,单相交流试验,给定子侧施加单相高频交流信号,辨识得到电机定子侧总电阻、总漏感;然后,直流试验,给定子侧施加单相直流信号,辨识出其定子电阻;最后,空载试验,定子侧施加三相交流信号,辨识出定子电感、转子电感,进而由式(4)、式(6)计算出其定转子互感与转子电阻。下面进行详细讲解。

图2 参数辨识结构框图Fig.2 Structure chat of parameter identification
2.1 单相交流实验
给定激励信号为

由于感应电机为感性负载,定子电流波形滞后于电压,设其相位差为φ,考虑到这个因素,则iα=Icos(ωt-φ)。
经过静止坐标系下等幅值Clark变换,得到三相静止坐标系下电压和电流为[15,17]

由式(8)~式(10)整理可得:

2.1.1 数字滤波器的设计
本文采用一阶低通滤波器,其算法公式为

式中:y(k),y(k-1)分别为现在时刻和上一采样时刻的输出值;u(k)为现在时刻的输入值;Δt为采样时间;τ为滤波时间常数,τ=a/(2πf),a为滤波系数,其值越大滤波效果越好,但滤波速率越低,f为滤波截止频率。
该滤波器算法简单,可以软件实现,仿真及实验效果也很理想,图3为本文滤波所要达到的效果。

图3 滤波器实现效果框图Fig.3 Filter′s effect block diagram
2.1.2 总电阻Req的辨识
Ia=Icos(ωt-φ)经过求绝对值、一阶低通滤波得到Ia的平均值为(2/π)·I,再乘以π/2便可得到Ia的峰值I。由基本电路模型分析及式(4)可知,Req=(Ucosφ)/I,如图4所示,实现步骤为:
步骤1:

步骤2:用Ua乘以式(13)可得:
式中:U2为常数,为随时间变化的正弦波。
步骤3:用一阶低通滤波器将式(14)中的正弦信号U1滤掉,可以求得总电阻:


图4 Req辨识原理框图Fig.4 Reqidentification principle block diagram
2.1.3 总漏感Leq的辨识
同Req的辨识一样,因Leq=(Usinφ)/ωI,同样按照Req的辨识思路,如图5所示,Leq辨识的实现步骤如下:
步骤1:Ia与Req相乘得:

步骤2:用Ua减去式(16)得:

步骤3:对式(17)求绝对值,然后进行一阶低通滤波,从而求得式(17)正弦信号的平均值为
步骤4:最终得到电机总漏感为


图5 Leq辨识原理框图Fig.5 Leqidentification principle block diagram
2.2 直流实验
给定直流激励信号为

故而电压、电流关系同式(9)、式(10),得到

根据电机T型等效电路分析,可得Rs的辨识如图6所示。

图6 Rs辨识原理框图Fig.6 Rsidentification principle block diagram
将Ua和Ia滤波后再代入式(7),辨识得到a相定子侧电阻[14]。
3 仿真验证
利用Matlab依照以上方法进行仿真,感应电机模块参数设定为:额定功率Pn=800 W,额定电压Un=195 V,额定频率 fn=50 Hz,定子电阻Rs= 2.735 Ω,等效转子电阻Rr=1.232 Ω,定转子漏感Lls=Llr=16 mH,互感Lm=638 mH。
仿真模型如图7所示,其中单相交流实验阶段,给定电流为0.75倍额定电流的峰值,给定频率分别为5 Hz,10 Hz,20 Hz;直流实验阶段,给定电流为0.5倍额定电流的峰值;空载实验阶段,给定电流为0.8倍额定电流的峰值,给定频率为2 Hz。仿真时间设为38 s,采用ode45算法进行仿真。
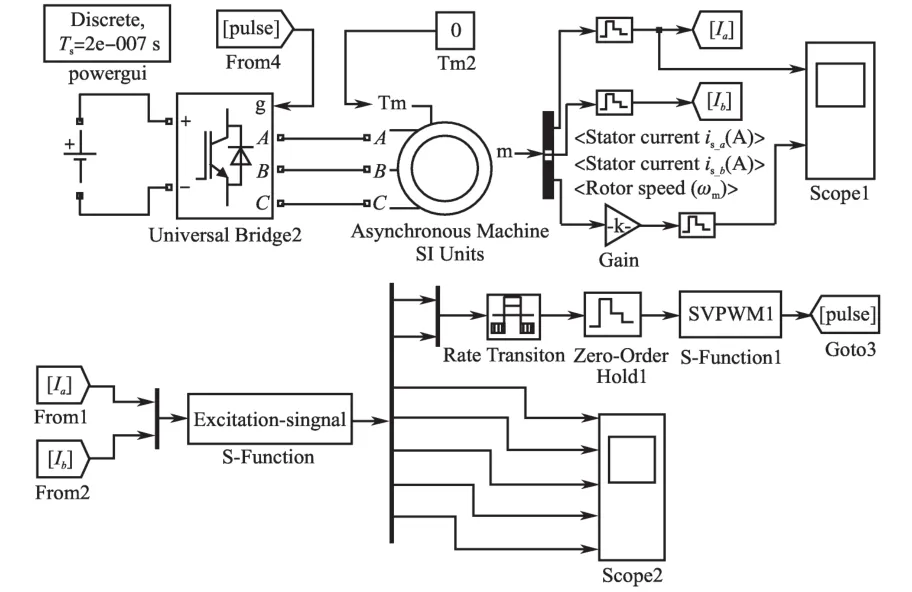
图7 仿真模型Fig.7 Simulation model
电机定子侧a相电流波形如图8所示。

图8 a相电流波形Fig.8 A phase current waveform
从图8可以看到仿真中各辨识阶段电流波形均达到给定,且比较稳定,通过仿真得到感应电机的辨识参数如表1所示。

表1 感应电机参数真实值与辨识值对比Tab.1 Induction motor parameter settings and identification value contrast
电机的辨识值与真实值对比发现,仿真得到的参数误差是很小的,经分析,误差可能是仿真中的滤波误差或者计算误差引起,在实验中,对这种误差也做补偿,使得最终的辨识参数准确度更高。表格中电机定子电感Ls、转子电感Lr、互感Lm及转子电阻Rr是空载试验后得到的,限于篇幅,空载实验的原理与仿真我们会随后专文给出,为了方便读者看出该辨识技术的精确性,其实验验证已经一同在下文附上。
4 实验验证
为进一步验证这种辨识方法的准确性,基于图2框架搭建的实验平台进行了实验。控制芯片采用的是瑞萨电子公司的RX62T型32位单片机,开关频率为16 kHz,死区时间为2 μs。实验用的电机与仿真中的电机参数一样。
参数辨识实验的定子a相电流波形如图9所示,其中依次对应着10 Hz,20 Hz单相交流实验,0.5倍,0.75倍额定电流峰值的直流实验和2 Hz三相交流空载实验,最终进行3次参数辨识,结果如表2所示。

表2 实验参数辨识结果Tab.2 The experiment parameter identification results
可以看出,实验中各阶段电流变化也都比较理想,3次辨识结果与参照值也很相近,说明这种辨识方法很准确。随后把离线辨识得到的电机参数对电机进行定子磁场定向矢量控制,发现电机空载和带载两种工作模式下,对指令转速跟踪得很好。
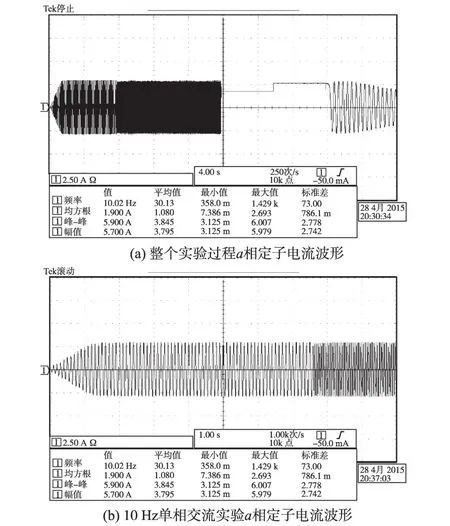
图9 实验中a相定子电流的波形Fig.9 A phase stator current waveform in experiments
5 结论
本文在对感应电机基本电路模型进行再分析后,通过单相交流实验详细讲述了测试电压的注入途径和滤波算法的方法步骤,接着分别进行了大量Matlab软件仿真和电机参数离线辨识实验,充分论证了这种辨识算法的可靠性。同时这种算法已经应用于家用电机调速系统中,结合使用中得到的经验,其突出特点有:1)算法简单,计算误差小,实用性强;2)由于本身是基于滤波算法的,所以抗干扰能力强;3)需要改进的是随后要进行的空载实验,该辨识阶段电机要求是非静态的,限制了应用场合。
[1]王成元,夏加宽,孙宜标,等.现代电机控制技术[M].北京:机械工程出版社,2008.
[2]陈凌飞,黄敬党.交流感应电机参数辨识方法的综述[J].电机技术,2009,32(S1):9-11.
[3]张虎,李正熙,童朝南,等.基于递推最小二乘算法的感应电动机参数离线辨识[J].中国电机工程学报,2011,31(18):79-86.
[4]Shen G T,Wang K,Yao W X,et al.DC Based Stimulation Method for Induction Motor Parameters Identification at Standstill Without Inverter Nonlinearity Compensation[C]// 2013 IEEE Energy Conversion Congress and Exposition(ECCE).Denver CO,2013,9:5123-5130.
[5]Guo J T,Li G L,Xie F,et al.0n-line Parameter Identification of Asynchronous Motor Using Improved Least Squares[C]// IEEE 9th Conference on Industrial Electronics and Applications(ICIEA).Hangzhou,2014,6:130-134.
[6]Liu S,Tang Q,Li B,et al.A New Kind of Parameter Identification of the Ship Propulsion Motor[C]//IEEE 33rd Chinese Control Conference(CCC).Nanjing,2014,7:6621-6625.
[7]Yazid K,Bouhoune K,Menaa M,et al.Application of EKF to Parameters Estimation for Speed Sensorless Vector Control of Two-phase Induction Motor[C]//International Aegean Conference on Electrical Machines and Power Electronics and 2011 Electromotion Joint Conference(ACEMP).Istanbul,2011,9:357-361.
[8]黄玉水,丁雄勇.运用于交流电机矢量控制的遗传算法参数辨识[J].电测与仪表,2010,47(4):17-20.
[9]杜远远,张鹏,陈振江,等.基于传递函数的遗传算法感应电机参数辨识[J].电力学报,2013,28(1):32-39.
[10]Fan B,Li X,Shi G H,et al.Motor Rotor Resistance Identification Based on Elman Neural Network[C]//IEEE International Conference on Automation and Logistics(ICAL).Zhengzhou,2012,8:196-200.
[11]应凯,蒋林,李洪波,等.基于转子参数辨识的感应电机矢量控制模糊系统[J].计算机应用,2013,33(S1):303-306.
[12]樊生文,丁茂起,李正熙,等.矢量控制感应电动机参数离线辨识仿真研究[J].冶金自动化,2012,36(4):60-63.
[13]戴亮,黄志远,陈业明,等.静止状态下异步电动机参数离线辨识方法[J].微特电机,2014,42(2):33-36.
[14]贺艳晖,王跃,王兆安,等.异步电机参数离线辨识改进算法[J].电工技术学报,2011,26(6):73-80.
[15]罗慧,刘军锋,万淑芸,等.感应电机参数的离线辨识[J].电气传动,2006,36(8):16-21.
[16]Jadric M,Terzic B,Despalatovic M,et al.Identification of Rotor Resistance and Transient Inductance of Induction Motors Using Frequency Selection Criterion[C]//IEEE XXth International Conference on Electrical Machines(ICEM).Marseille,2012,9:980-986.
[17]阮毅,陈伯时.电力拖动自动控制系统—运动控制系统[M].北京:机械工业出版社,2009.
Off-line Parameter Identification of Induction Motor Based on Filtering Algorithm
ZHANG Hu,SUN Tianshuo
(Power Electronics and Motor Drives Engineering Research Center of Beijing,North China University of Technology,Beijing 100144,China)
Identification of induction motor parameters is an important research topic in the field of motor control.In order to establish the mathematical model of the control system and to achieve optimal control of the motor,it is an important prerequisite to obtain motor parameters of high quality.Firstly it analysed the equivalent circuit of induction motor.Secondly it grasped the characteristics of current lag which was produced by induction motor itself.And according to the traditional method of motor parameter identification,it respectively conducted the improved single-phase AC test,DC test and three-phase AC test.Lastly through the filtering calculation,we could get the single-phase stator resistance,stator inductance,mutual inductance and rotor resistance of motor.The Matlab simulation and experiment verify the accuracy of the off-line identification technology.
induction motor;parameter identification;vector control;filter;PI control
TM346
A
10.19457/j.1001-2095.20161001
2015-09-24
修改稿日期:2016-04-19
北京教委专项,高性能变频洗衣机控制系统研究(KM201610009002)
张虎(1976-),男,工学博士,讲师,Email:zh@ncut.edu.cn
猜你喜欢
中国特种设备安全(2022年1期)2022-04-26
防爆电机(2021年4期)2021-07-28
防爆电机(2021年3期)2021-07-21
上海大中型电机(2021年2期)2021-07-21
防爆电机(2021年1期)2021-03-29
铁道通信信号(2020年6期)2020-09-21
铁道通信信号(2019年3期)2019-04-25
通信电源技术(2018年5期)2018-08-23
通信电源技术(2018年5期)2018-08-23
中成药(2018年2期)2018-05-09
