基于地磁的车辆检测器设计
2016-11-01 20:47:24谭福奎周家萍
兴义民族师范学院学报 2016年3期
谭福奎 王 靖 周家萍
(兴义民族师范学院, 贵州 兴义 562400)
基于地磁的车辆检测器设计
谭福奎 王 靖 周家萍
(兴义民族师范学院, 贵州 兴义 562400)
基于地磁感应设计的无线车辆检测器,在道路交通、停车场智能引导系统应用中,具有尺寸小、地面破坏少、组网便利等明显优势。采用RF433MHz无线收发模块CC430和地磁传感器结合设计,加上均值和中值混合滤波,状态更新的算法,进一步提升了车辆检测的可靠性。
车辆检测;信号处理;无线传送
道路车流量的检测关键在于对车辆信号的提取。地球磁场在几公里范围内可视为均匀分布,车辆可视为较大的铁磁物质,穿过磁场时会对周围磁场产生扰动,各向异性磁阻传感器可根据此扰动检测车辆,如果结合无线传感器网络技术则可实现精度高、体积小、成本低、无需布线、部署灵活、不影响道路交通和美观的车流量检测方式[1-3]。传感器大部分是基于地磁垂直分量 (垂直于车辆方向),然而地磁垂直分量并不能全面体现车辆的扰动效应,有人提出基于磁偏角检测车流量,但由强磁场导致的磁传感器输出信号漂移对检测结果影响较大,对传感器节点的摆放要求高,如果传感器节点摆放的不平,对检测结果会有很大的影响。
假定一种利用人工智能技术进行肿瘤筛查的方法,包括以下步骤:获取影像数据、数据预处理、图像分割、边缘检测、肿瘤区域标记、基于预先训练的模型进行分类预测、自动生成筛查报告,为患者提供建议。这一方案显然满足疾病诊断方法的第一个构成要件“以有生命的人体为对象”,但是如果申请人在撰写专利申请文件时,为了规避疾病诊断方法的第二个构成要件而有意省略“自动生成筛查报告”的步骤,或者将这一步骤改写为:输出医学图像指标和相关预测参数以供医生进行诊断,此时,权利要求请求保护的方案是否属于以获得诊断结果为直接目的,结论就可能存在一定的争议。
本车辆检测传感器,主要由Freescale公司的微型、低功耗、3轴数字地磁仪MAG3110和TI公司带无线射频收发器核的低功耗微处理器CC430F6137组成。该传感器可以应用在停车场智能停车引导、智能交通管理、高速公路车流量检测等工程中,具有准确率高、对地面破坏小、安装方便等特点[4]。
一、高速公路车辆行驶信号检测原理
无线地磁车辆检测器是利用磁敏传感器实时检测车辆对地磁的影响,以判断行车道上是否有车辆通过,并将检测数据通过无线方式传送给无线检测接收机。本系统芯片采用低功耗、高性能稳定的CC430芯片和飞思卡尔三轴磁力传感器芯片MAG3110组成。如图1所示,当车辆通过传感器节点S1时,会对该范围的地磁场有所干扰,MAG3110可以感知到地球磁场前后发生的变化,CC430并对磁场数据进行采集处理,通过分析地磁信号的变化提取出车辆的特征信号[5]。当有车经过或者停留在节点上时,MAG3110 受干扰后会检测到磁场变化过程,产生一个波形变化信号,通过算法设计提取车辆信息,再将车辆信息通过无线网络并向上传至网关或接收机,网关或接收机与控制中心的主机连接。由主机控制前方的大屏幕显示车辆速度、启动隧道照明控制系统点亮隧道灯,实现有车时隧道灯开启、无车时自动关闭的节能效果。如果接收机检测到车辆经过S1和S2两次信号的时间差即可算出车辆的平均速度。
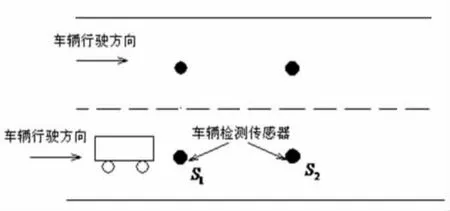
图1 高速公路车辆行驶信号检测原理图
无线车辆检测接收机能接收无线地磁车辆检测器发送的信息,再通过无线或有线上传到控制中心的主机。无线检测接收机可接收通信距离范围内40个无线车辆检测器的信号。
二、地磁车辆检测传感器的硬件设计
1.无线地磁车辆检测器的硬件设计
对不同发育阶段与叶功能性状的相关性分析显示(表2),样地1和样地2长柄双花木的发育状况一致,均与LT、LA呈显著正相关、与LWC、SLA、LPC呈显著负相关(P < 0.05);样地3和样地4的长柄双花木发育状况一致,均与LT、LA呈显著正相关、与LWC、SLA、LNC、LPC呈显著负相关(P < 0.01)。

图2 无线地磁车辆检测器的结构框图
地磁车辆检测器选用开放的ISM微波频段,433MHz无线传感技术。内置高性能锂亚硫酰氯电池供电,采用低功耗设计可连续工作3到5年。设备外壳设计类似圆形道钉结构,用高强度ABS和PC材料注塑成型,外形尺寸:直径130mm×高30mm。防水,抗酸碱腐蚀,抗冲撞。
(1)核心处理器模块
网络方案。本方案中资源池内只有物理机,采用非虚拟化场景解决方案。SDN涉及网元主要包括SDN控制器、SDN硬件交换机、核心/DMZ负载均衡器、SDN网关、核心防火墙等。
地磁车辆检测器采用CC430F6137主控制器,无线部分处理电路同接收机一致。外部接口电路还包含电池电压检测、地磁传感器、开关量检测等电路。
本研究旨在探讨喉源性咳嗽患者的局部病理改变与中医辨证的相关性,以期为临床上采用中医治疗喉源性咳嗽提供有力的借鉴和帮助,为此,针对2015年1月~2017年1月期间广西中医学院第一附属医院耳鼻咽喉科门诊收治的600例喉源性咳嗽患者进行研究分析,现报道如下。
(2)地磁测量接口
MS(k)---传感器采集的信号;
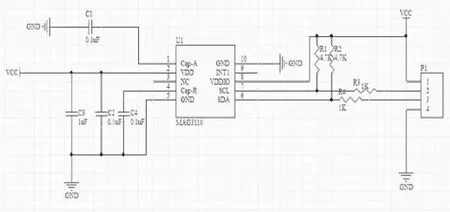
图3 地磁传感器模块电路
2.无线地磁车辆信息接收机的硬件设计
无线地磁车辆信息接收机采用TI的CC430 F6137处理器模块设计,提供RS232接口与电脑链接,开关量输出,频段设置等功能,外挂热释电红外传感器以进一步的探测人经过隧道时点亮隧道灯。外壳用金属屏蔽机箱,可以挂墙安装,天线外置。如图4所示。
无线地磁车辆检测器采用地磁检测芯片MAG3110结合CC430处理器设计。通过地磁场检测来判断车辆,普遍采用两种方式:对车辆经过时磁力线扭曲情况检测来判断或者检测车辆通过时对磁场的垂直和水平方向的磁场强度变化来判断[6]。本文研究重点是判断车辆经过传感器节点时地磁场的变化,采用后一种判断方式,以汽车作为铁磁体,当其靠近地磁传感器时会引起磁力线的变化,通过监测这些微小变化,可以判断行车道是否有汽车通过。为了提高对行车道有无车辆通过的准确率,采用三轴磁阻传感器进行设计。结构框图如图2所示。

图4 无线地磁车辆信息接收机的结构框图
三、无线地磁车辆检测传感器的软件设计
1.车辆检测算法
将传感器固定在车道中央,当有车辆经过时,它可以检测到磁场发生变化的车辆信号。通过对车辆地磁响应信号的分析可以获得道路上车辆通过的信息。
这里可以把地磁信号分成三种不同的信号,其一是没有车辆经过时地球表面的磁场信号GS(k),其二是传感器采集到受相邻道路的车辆的干扰或者是其他物体影响的干扰磁场信号NS(k),最后一种是车辆通过时对磁场的扰动磁场信号VS(k)。传感器在k时刻采集的信号MS(k)是背景磁场信号GS(k)和干扰信号NS(k)再加上车辆信号VS(k)共同叠加的信号[8、9],如式(1)所示。

为了达到交通道路车流量的实时监控,其中还包括:每次从检测状态循环到下一次检测状态时,记为有一辆车通过,并累加车辆数量;根据累加的车辆数量计算车流量;将车流量数据上传至相应服务器。系统整个状态阶段有三种不同的状态变化,初始状态、检测状态和有车状态,在进入检测环节只有后两个状态的循环。初始状态:系统首先进入初始状态,在最短的时间内通过均值滤波法选择基线,阈值是预先设定的,经过多次实验测得初始的阈值一般在30—50为宜,经过前期设定初始化之后,系统跳入检测状态。检测状态:在检测状态中,系统进行车辆信号的判断,在这里不断的调整基线,不管外界的温度有怎么样的变化,基线在一定的权值下发生相应的变化,阈值是在多次干扰信号出现的时候进行更新的。当检测到车辆信号,并且信号数量达到一个临界值时,系统会跳到有车状态。有车状态:在有车状态中,基线是不进行自动更新的。当车辆信号消失,并且地磁信号数量达到一个临界值时,系统跳回检测状态。算法会在检测状态和有车状态之间循环,完成一次循环就是检测到有车辆经过节点,所以循环的次数就是车辆的数量,这样可以达到道路交通车流量的检测。
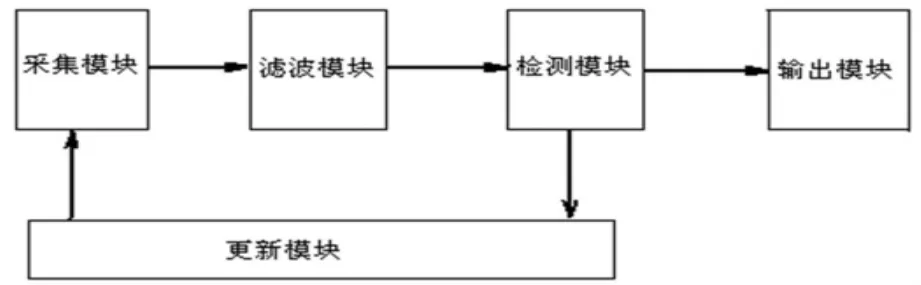
图5 车辆检测结构图
由图5车辆检测结构图可以看出,车辆检测算法包括:采集模块,用于实时采集目标地的原始三维地磁信号,并从所述原始三维地磁信号中获取基线数据;滤波模块,用于对采集到的三维地磁信号进行滤波,并从中获得三维地磁信号数据;检测模块,用于将三维地磁信号数据与基线数据做差值计算,若三个差值中至少有两个大于预设阈值,则将三维地磁信号判断为有车信号;以及当连续多次三维地磁信号均为有车信号,则记为有车状态;更新模块,用于根据三维地磁信号的判断结果对所述基线数据进行更新。输出模块,通过对地磁信号的检测判断是否有车或无车,有车时输出开关量,同时将该信息传送到接收机。其中,采集模块采用三轴各向异性磁阻传感器实现。
为了达到交通道路车流量的实时监控,其中还包括:计数装置,用于每次有车状态到下一次有车状态时,记为有一辆车通过节点,并累加车辆数量;车流量计算装置,根据累加的车辆数量,计算该路段的车流量;输出模块,用于将所述车流量数据上传至相应服务器,服务器上的车流量数据可用于交通部门实时掌握道路交通情况。
第二部分是中值滤波法。采样N次的连续信号,一般N为自然奇数,采用排序算法,这里把N 次采样的信号值,按照从小到大或者从大到小的顺序排列,这N次采样的数据需要用一个合理的数据代替,那就选择顺序排列的中间值。中值滤波的优点就是很轻松的去掉突变的因子,使得信号波形更加平稳些,比均值滤波可靠性更高[1、12]。
2.信号的滤波
f(k)————经过滤波后的连续磁信号;

地磁测量由 Freescale的地磁信号传感器MAG3110组成[7]。该器件为3轴传感器,水平放置于与CPU间隔100mm的线路板一侧,以减少PCB(印制电路板)产生的电磁干扰对其影响。外围电路见图3。
f(k)---均值信号。
国家局提出数据中心建设,归根到底是要为行业发展和企业决策提供及时、准确、系统的信息支撑,因此,对数据进行统一管理显得尤为重要。一是要保证信息数据源头的质量,即各应用系统的数据是严格按照相应的规范采集的,是依法、依规、依标准的可加工和交换的数据;二是要建立数据质量的控制体系,数据的加工、存储、交换的过程严谨有序,不出差错,以保证数据中心的数据质量;三是要按照“授权访问,各取所需”的规则发布数据,避免信息发布的失控,做到“数入一库,数出一门”;四是要采用专业的统计分析技术,对数据中心海量的数据信息进行深度的挖掘和分析,将数据资源提炼为决策资源,以提高信息资源的增值服务。
针对目前我国病理学教学的普遍问题,基础病理学教学所安排的学时,对于病理学这一涉及到所有临床专业疾病的重要学科是远远不够的,医学生病理专业素质不高;临床病理教学难以培养高质量的病理专科医生,并且病理专科医生存在巨大的缺口等困境。结合目前慕课平台的高速发展,认真调研慕课平台的开放原则、注册对象,培养模式、运营情况等等,在病理学教学中引入慕课平台,将大有作为。但是,如何让慕课平台在病理学教学中发挥更大作用也有待于病理学教研工作者进行深入的调查和研究。
为了更好地结合检测信号特征,采用两种滤波方法的结合。在没有车辆信号时使用均值滤波法,可以滤除毛刺信号,得到更加准确的基线值。检测到车辆信号的瞬间,信号会有较大的波动,此时采用中值滤波方法可以有效地去除信号的脉动干扰,使得信号更加平滑。
3.车辆检测
算法的核心是车辆信号的判断和状态机的应用[1、8、13]。车辆是否存在是利用基线和阈值来判断的;简化状态机是把信号分为有车状态和无车状态,两种状态进行比较来确定是否有车辆存在。
(1)车辆信号判断
检测信号被采集滤波后,得到平滑的混合信号,更新的基线为地磁背景信号,阈值是用来判断信号是否为车辆信号。对滤波后的X、Y、Z三轴的地磁信号与三个轴各自的基线进行比较得到三个的绝对差值,其中至少有两个差值超过了阈值时,系统判定为车辆信号。除此之外系统判断为干扰信号。如图6所示,这里以Z轴为例说明车辆信号的检测分析。

图6 车辆检测信号
(2)状态机的检测
态机检测法有他自身的优缺点,优点是能够准确的消除掉相邻车辆的干扰,不会受到其他车辆的影响,缺点是具有延时的特性,失去了实时性的特点[1、8、14]。如图7为简化的状态机原理图。
由于人工智能对其创作结果缺乏理解力和创作意图,需要通过某种方式来判断和选择出其中真正符合人类精神需求的创作,这个过程就是对人工智能创作数据的挖掘。人工智能的计算能力越强,创作生成内容数量越多,就越需要数据挖掘。否则对人类有价值的艺术表达埋藏在杂乱无章的海量数据之中无法被人类消费利用,也就无法最终实现其市场价值。人工智能创作结果的价值的发掘者,可以类比物权法中先占或加工的规则获得对其挖掘出来的独创性表达的知识产权。

图7 状态机原理图
在进入车辆检测时,将进行检测状态和有车状态两个状态的循环。在检测状态中,不断地判断采集到的信号是有车信号还是无车信号;当连续多次采集到的是有车信号时,从检测状态进入有车状态,当连续多次采集到的是无车信号时,跳回检测状态,如此实现了状态的循环变化,每循环一次就记做一辆车通过,这样就可以实现道路车流量的检测,再实时的把道路信息通过无线网络传输到监控中心,由此实现了道路车流量的实时监控。
根据式(1)可以看出,算法的最终目的就是提取车辆扰动地磁信号,经过各种运算得出车辆信息。
4.更新模块
更新模块包括基线的更新和阈值的更新两部分。算法在检测到车辆信号时,基线和阈值是预先设定的,当传感器采集多次无车信号后,由均值滤波得到三个轴各自的初始基线;阈值是经过多次实验经验所得,用于检测车辆信号。系统进入检测状态后会不断地根据一个加权函数来更新基线,实现基线的重新标定。滤波后的信号是在以一定的权值的方式不断的更新基线。如式(3)所示的是3个轴基线的加权函数。当外界环境发生变化时,为了更准确的确定基线,这个权值一般设为0.04较好。权值越大基线变化越快,受外界干扰影响越大。相反基线变化越慢,受干扰影响较小。

式中Csi(k)————自适应基线;
地磁信号采集后需要滤波预处理,滤波部分包括均值滤波和中值滤波两部分。均值滤波[1、10、11]。是对某一参数连续采样N次,N可随意选取,然后把N次采样值求和,再取其平均值作为本次采样值。均值滤波法比较适用于波动比较小的范围内,削弱信号的高频干扰。对地磁信号的N次采样的平均为f(k),如式(2)所示。
通过调节水平天窗开启面积改变风机负载,对风机风量进行调节。利用2种方法对不同水平天窗开启面积下的风机风量进行测试,2种测风方法的相对误差计算公式见式(11),2种测试方法的测试结果见表1。
k————信号的个数;
i————三个磁轴之一。
阈值的更新主要是对多次相邻车位上车辆的干扰信号的采集,选取最大的干扰信号作为新的阈值。根据3.3节中的车辆信号的判断方法,可以得到车辆干扰地磁信号,系统没有车辆信号的情况下,不断地把干扰信号与基线作比较,选取最大的干扰差值作为新的阈值。
5.算法流程
图8为车辆检测算法流程图,包括以下步骤:首先,实时采集目标地的原始三维地磁信号,从原始三维地磁信号中获取相应的三维基线数据。其次,对采集到的三维地磁信号进行滤波,并从中获得平滑的三维地磁信号数据;然后,将三维地磁信号数据与基线数据做差值计算。再次,若三个差值中至少有两个大于预设阈值,则将三维地磁信号判断为有车信号,反之为无车信号。基线数据从原始三维地磁信号中获得,且根据三维地磁信号的判断结果对基线数据进行更新。最后,当连续多次三维地磁信号均为有车信号,则记为有车状态,同样,当检测到连续的无车信号时,则记为检测状态。车流量检测算法还能够通过三维地磁信号的判断结果动态的调整基线,解决了地磁场漂移现象,并且对有车信号的连续多次判断,避免了漏检或多检,较大的提高了检测的精度。在信号检测处理时,三个坐标轴在有车辆驶入时都有变化,至少要有两个轴检测出车辆,系统才能够提取出车辆的信息。在信息处理过程中要进行信号的确认,所以系统有几个数据的延迟。接收机信号处理流程如图9所示
计算机网络管理者是使用计算机的主体,对计算机的安全应用具有重要影响,很多网络安全问题的出现,也都是由于管理者和用户们缺乏对网络管理的安全意识导致的,因此在计算机网络中进行对安全问题的有效管理,需要加强管理者的重视,培养安全意识,积极参与各种措施,针对计算机网络中存在的各种安全隐患进行管理和防范,从而有效的减少各种安全隐患的出现,降低网络隐患对管理者和用户们的危害。
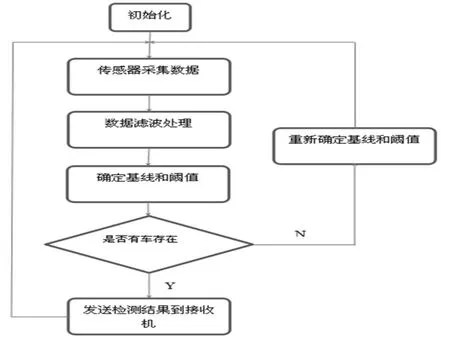
图8 为车辆检测算法流程图
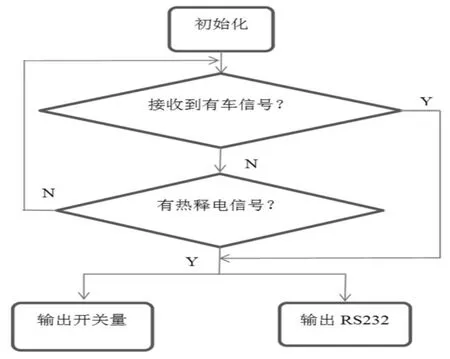
图9 接收机信号处理流程图
四、低功耗的设计
地磁车辆检测器内置电池,选用开路电压大于3.64V的锂亚硫酰氯电池,该类电池使用温度范围-55~+85℃,适合长时间微电流工作,工作年限可达8年以上。符合设计需要,电池更换周期,主要取决于检测器的低功耗设计性能[5]。
温氏股份在投资者互动中表示,公司2019年商品肉猪出栏量预计约2500万头,2020年的出栏量预计是2900万头。公司仍会按照自己的既定计划进行生产。未来是否对部分受非洲猪瘟影响严重的地区进行调整,需要进一步的调研和论证分析再做决定。
CC430F6137的默认耗电约小于 1.8μA、32.768kHz,所以休眠的时候设计工作在LPM4低功耗模式。实际调试中,发现CC430F6137工作在12MHz时,休眠后功耗很低(小于4μA),但在初始化I2C以后,功耗比较高,I2C模块消耗的功率约200μA。因此仅当需要与MAG3110通讯时,才可以打开I2C外设。
贵州省是旅游大数据示范省区,拥有旅游大数据示范性特质,具备充裕的基础设施和先天条件。国家旅游局和省政府及联通公司,大家通过三方数据整合,从景区等级方面、天气气候方面、游玩季节方面以及客源方面进行了大量数据分析,最后得出综合指数。期间分为景区等级指数内容、适游季节指数内容、景区饱和指数内容、交通拥堵指数内容和网上关注指数内容等。
程序设计中使用计算分支和快速查表来代替程序标志位和冗长的软件计算,同时尽量使用单周期的CPU寄存器。CC430的内部模块和I/O脚状态都会对耗电产生影响,所以启动后要及时关闭I/O的状态。无线部分功耗较高,不发送时CPU工作于晶体震荡器关闭的SLEEP状态。
MAG3110的待机电流为<2μA,休眠前先设置成待机模式,唤醒以后再将MAG3110设置成活动模式。
五、结语
本次设计的无线地磁车辆检测系统,与传统的电感线圈交通参数传感器相比,对地面的破坏少,安装与维护简单,适合道路交通或大型停车场的使用。测试发现,无线地磁车辆检测器在高速公路车道上使用,由于受车辆行驶速度(大于100km每小时)和车辆不走行车道或者超车道而走两道之间的影响,检测准确率低于停车场使用效果,且功耗明显增高。通过实际效果测试,在高速公路车道上对有车还是没车通行的检测判断是可行的。
[1]李云龙.基于无线传感器网络的车辆检测算法[D].哈尔滨工业大学,2012:19-26.
[2]PadmavathiG,Shanmugapriya D, KalaivaniM.A Study on Vehicle Detection and Tracking Using Wireless Sensor Networks[J].WirelessSensor Network,2010, 2:173-185.
[3]王俊,金秀峰,黄继伟.基于433MHz频段的无线地磁车位检测传感器节点设计[J].传感器与微系统,2014,33(10):47-57.
[4]韩印,马万达,张楠.先进的城市智能停车诱导系统设计与实现.[R/OL].(2010-7-9).http://tech.rfidworld.com.cn/2010_07/0be04c20a13de386.html.
[5]马建程.无线低功耗地磁车辆检测传感器的设计[J].电子产品世界,2014,5:44-48.
[6]崔逊学,赵湛,王成.无线传感网络的领域应用与设计技术[M].国防工业出版社,2009
[7]3-AXIS DigitalMagnetometer[R/OL].(2011-2).www.freescale.com.
[8]金华强.基于ARM传感器的车位检测系统设计与实现[D].浙江工业大学,2012:36-45.
[9]姜胜山.基于WSN的车辆检测系统的研究与设计[D].国防科学技术大学,2009:37-39.
[10]张军强.基于无线传感网络的地磁车辆检测技术[D].北方工业大学,2015:29-38.
[11]曹奕涛,杨波.基于无线传感器网络的入侵检测系统设计 [J].电子技术应用,2010,36(2): 106-110.
[12]Kanungo T ,MountD M.An Efficient K-Means Clustering Algorithm[J].Analysis and Implementation, 2002, 24(7): 881-892.
[13]曹喆,闻育,潘霓,等.一种基于K—Means分类的状态机车辆检测算法[J].工业控制计算机, 2010,23(1):55-58.
[14]Chal K F, Huo H, Fang T.Online vehicle detection algorithm based on PLA time seriesrepresentation[J].Computer Engineering and Application, 2007,43 (10):210-213.
责任编辑:王文宝
The design of vehicle detector based on geomagnetism
TAN Fu-kui WANG Jing ZHOU Jia-ping
(Xingyi Normal University for Nationalities,Xingyi,Guizhou 562400,China)
The wireless vehicle detector based on the geomagnetic induction design has obvious advantages in the application of road traffic and parking lot intelligent guidance system,which has the advantages of small size,less ground damage,convenient networking and so on.Using the RF433MHz wireless transceiver module CC430 and geomagnetic sensor design,combined with the mean and median hybrid filter,the state update algorithm,to further enhance the reliability of the vehicle detection.
Vehicle Detection;Signal Processing;Wireless Transmission
1009—0673(2016)03—0114—06
TP274
A
2016—03—20
黔西南州科技计划项目(2014—7):“高速公路隧道节能照明控制系统LED灯具控制器研究”的阶段性成果。
谭福奎(1966— ),男,贵州兴仁人,兴义民族师范学院物理与工程技术学院正高级实验师,主研究方向:电路与系统、信号处理与嵌入式系统应用。
猜你喜欢
高技术通讯(2021年3期)2021-06-09 06:57:46
科学(2020年5期)2020-11-26 08:19:14
舰船电子对抗(2016年5期)2016-12-13 08:41:14
数学教学通讯·初中版(2015年5期)2015-06-17 15:33:29
空间控制技术与应用(2015年3期)2015-06-05 14:30:31
遥测遥控(2015年2期)2015-04-23 08:15:18
中国交通信息化(2014年6期)2014-06-05 03:12:07
航天器工程(2014年5期)2014-03-11 16:35:50
电视技术(2014年19期)2014-03-11 15:38:21
电子设计工程(2014年20期)2014-02-27 12:01:00