往复泵曲柄连杆机构振动特性分析
2016-10-14 07:53夏江敏刘海冰张振海朱石坚
噪声与振动控制 2016年3期
夏江敏,刘海冰,张振海,朱石坚,俞 翔
往复泵曲柄连杆机构振动特性分析
夏江敏1,刘海冰2,张振海1,朱石坚1,俞翔1
(1.海军工程大学 动力工程学院,武汉 430033;2.中国人民解放军4805工厂 上海船厂,上海 200136)
运用刚性和柔性多体系统动力学理论,对舱底泵曲柄连杆机构进行运动学和动力学计算,分析出其主要激励力频率和大小,并运用多体系统动力学软件Adams,对其进行运动学、动力学仿真和振动分析。结果表明,用柔性多体动力学理论将机构柔性化,能够更加准确揭示其振动特性,对往复泵设计和低噪声修理具有重要参考意义。
振动与波;舱底泵;曲柄连杆机构;多体系统动力学;运动学
船体结构和管路受意外撞击破损会造成舱室内部进水,影响船舶的正常航行和操纵,严重时影响到船舶的生命力。同时,船用机械、船舶各个系统在工作过程中、船员的生活中也会产生大量的污油和污水,需要用往复泵将它们排至舷外。在不同类型泵的比较中,往复泵具有自吸能力强和排出压力大等重要优点,无论泵排出管中有多高的背压,只要电机具有足够高的功率,泵组件有足够大的强度,往复泵都可以把液体增压到一定的压力并排出,因此船舶都装有多台往复泵,用以在任何航行工况由舱内向舷外排水,是船舶主疏水系统的重要设备。
舱底泵作为船舶重要辅助机械设备,具有大的运行功率和惯性,因此其工作条件相对稳定,由其产生的线谱有很高的强度和稳定度,所以其振动噪声性能直接关系到潜艇的辐射噪声特性。经过对某型潜艇往复泵单机辐射噪声测试,发现往复泵引起的辐射噪声达130 dB以上。曲柄连杆机构在往复泵工作过程中存在着运动不连续的固有特点,会引起机体的振动,并且会导致泵出口流量不均匀,从而引起系统管路的压力脉动,使系统在流体输送过程中不可避免地出现冲击和振动。这不仅可能造成管路及其附件的损坏,管路振动还会通过各种连接件传递给船体,引起船体结构振动,导致船体的环境振动和环境噪声增大。
本文选取双作用往复式舱底泵为研究对象,对曲柄连杆机构进行运动学和动力学分析计算[1],利用多体动力学仿真软件Adams[2],分别对其进行曲柄连杆机构刚性和柔性的振动分析[3],并对其结果进行了对比分析,为运动构件的动力学仿真和振动分析提供了新思路,为复杂机械的设计和低噪声修理工艺提供了新依据。
1 曲柄滑块机构运动学分析
双缸双作用式往复泵从工作原理和受力分析上来说,与单缸单作用往复泵的工作原理相同,所以本文将双缸双作用式舱底泵简化为单缸单作用往复泵,对其进行运动学和动力学分析计算[4]。
运动学分析定义为,只分析和计算构件的运动位置随时间的变化关系,而不分析其变化原因。此型舱底泵曲柄连杆机构结构简图如图1所示[5]。
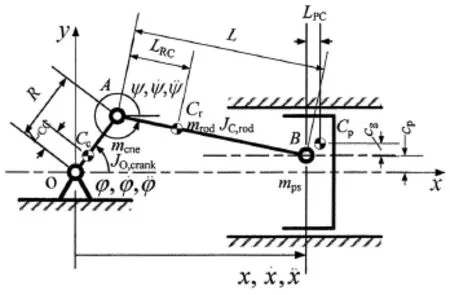
图1 曲柄连杆机构结构简图
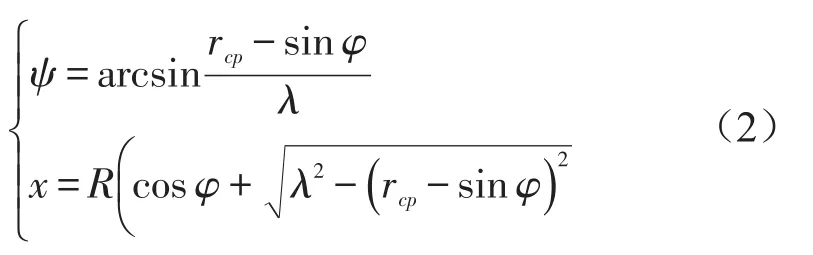
此系统为完整约束系统,取(φ,ψ,x)为系统
广义坐标,位置关系如下

上表达式中λ=L/R表示连杆的曲柄比;rcp=cP/R表示活塞销偏心比,cP为偏置量。选用φ为系统的独立坐标,则其非独立坐标表达式为
参照D'Alembert,s虚功原理,单缸往复泵的运动表示为

上表达式中,FRi表示构件有功力,FIj表示构件惯性力,MRk表示构件有功力矩,MII表示构件惯性力矩。
以上为单缸单作用往复泵的曲柄连杆机构运动学分析模型,由于双缸双作用往复泵的运动原理与此相同,所以利用该方程可进一步推导两缸系统运动方程。在得到往复泵传动机构公式化模型的基础上,可以得到系统的运动规律方程,再利用Adams仿真计算软件,对其进行运动学数值计算,验证计算结果。
2 曲柄连杆机构动力学分析
工作中的舱底泵,曲柄连杆机构的主要作用力有:燃气对活塞表面的气体压力;曲柄连杆在旋转运动和往复运动过程中产生的惯性力;外载荷对构件的反作用力;零件之间相互摩擦产生的摩擦阻力等。由于曲柄连杆在运动过程中外部载荷和摩擦力相对较小,所以在对其进行动力学计算分析时,通常忽略系统中构件间的摩擦阻力与外载荷对其的反作用力,着重分析活塞表面的燃气压力和曲柄连杆工作过程中产生的惯性力(包括活塞的往复惯性力、曲轴的旋转惯性力、连杆作平面运动时产生的惯性力)在系统中的受力情况。本文主要对某型双缸双作用式曲柄连杆机构进行了动力学计算分析。并且利用Adams对曲柄连杆机构进行了动力学仿真分析。
2.1质量换算
在对舱底泵曲柄连杆机构进行动力学分析之前,首先须对系统中曲柄连杆机构进行质量换算。将构件简化为集中质量系统,具体如下:
(1)连杆组
连杆组由连杆本体、连杆小头衬套、连杆盖、连杆螺栓、连杆螺母、连杆轴承构成,在工作平面内作复合平面运动。连杆组件的运动由往复运动和旋转运动合成,在总动力效应相同的前提下,其总质量mc可以分解为在活塞销处作往复运动的质量m1和在曲柄销处作旋转运动的质量m2之和,并且还应该同时满足如下三个条件:
①质量不变
②系统的质心位置不变

上式中a为质心距曲柄销中心的距离,b为质心距活塞销的距离。
③系统对质心的转动惯量不变

(2)活塞组
活塞组件由活塞、活塞环、活塞销以及它们的紧固件构成,在气缸内做往复直线运动。忽略活塞组件二阶运动的影响,可以将活塞组质量都等效在活塞销的中心处,现以mp表示等效质量

(3)曲轴组
曲轴组件由曲轴定时齿轮、止推片、曲轴、平衡重构成。由于与曲轴中心线对称部分产生的惯性力相互平衡抵消,所以,计算时只需考虑不平衡质量即可。将不平衡质量等效在曲柄销中心处,令其质量为mk,且须保证换算前后的转动惯量相等。
综上所述,曲柄机构的等效质量为:
等效在曲柄销中心处的往复惯性质量

等效在曲柄销中心处的旋转惯性质量

2.2作用于曲柄连杆机构中的力和力矩
(1)气缸内的气体压力
工作腔内的气体压力作用在活塞表面,随曲轴的转动而周期性变化。活塞表面所受压力值为

其中△P为缸内气体压力的表压,D为气缸直径。
(2)惯性力
①往复惯性力
构件往复惯性力的值等于其运动质量与加速度的乘积,其方向与加速度方向反向。所以,曲柄连杆机构往复惯性力的总和为

上式中 pj1称为一级往复惯性力,pj2称为二级往复惯性力。二级以上往复惯性力的值已经很小,在工程上,对结果的影响可以忽略不计,所以,本文在计算过程中,只选取了前两级往复惯性力。
②离心惯性力
往复泵的曲柄连杆机构中,不平衡质量产生的不平衡离心惯性力为

式中mr和r、ω都为定值,所以旋转产生的离心惯性力也是定值,而其作用力的方向,始终从质心沿曲柄半径指向外侧。
3 曲柄连杆机构振动仿真分析
在以上运动学和动力学分析的基础上,可以得到施加于舱底泵曲柄连杆机构的激励力载荷。本文接下来利用Adams多体动力学仿真软件,首先建立曲柄连杆机构的实体模型,通过施加上述计算得到的激励力,得到曲柄连杆机构的运动学和动力学特性,并对其进行振动仿真分析,得到其模态特征和振动响应[7]。然后利用Adams的柔性模块,将曲柄连杆机构进行柔性处理,再进行动力学、运动学和振动仿真分析,最后将刚性和柔性的分析结果进行对比。
3.1曲柄连杆的基本参数
本文研究的舱底泵曲轴稳定工况下转速为200 r/min,曲柄连杆机构其他具体的基本参数如表1所示。

表1 曲柄连杆机构基本参数/mm
3.2动力学与运动学仿真结果
在上述计算的基础上,利用Adams进行的运动学和动力学仿真[8]如下图2、图3所示:
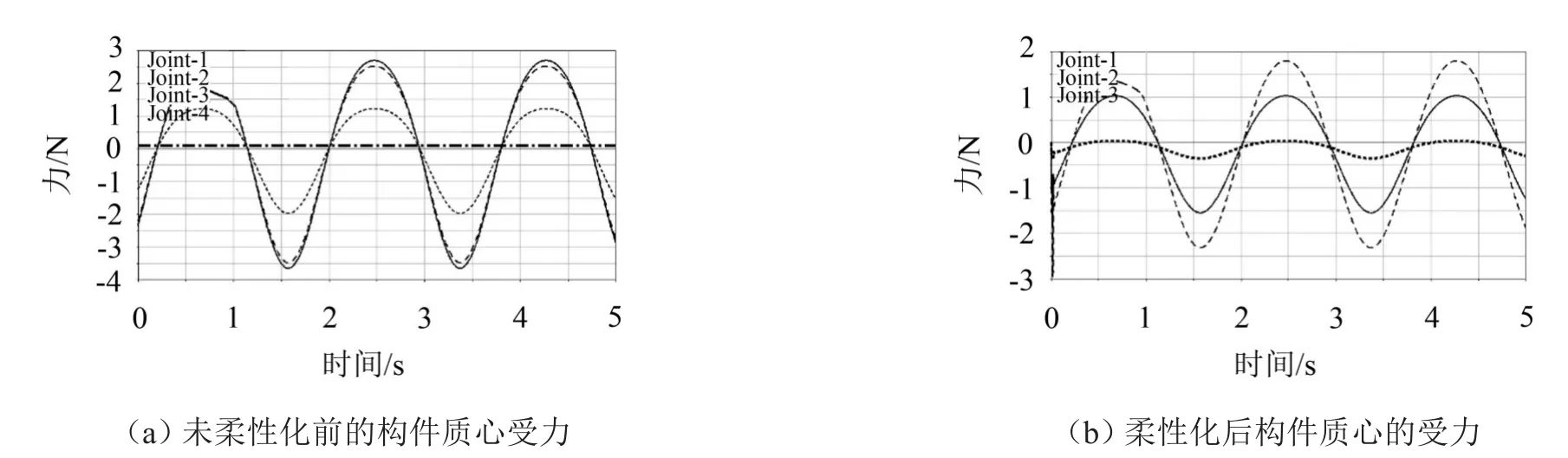
图2 各个构件质心受力图
其中,Joint 1表示活塞销质心位置,Joint 2表示连杆质心位置,Joint 3表示曲柄销质心位置,Joint 4表示活塞质心位置,Part 2表示连杆,Part 3表示曲柄销,Part 4表示活塞。从上面仿真结果可以看出,将曲柄连杆机构视作柔性体后,所得到的质心受力情况曲线,构件的加速度曲线,都较视为刚性体时更为光滑,峰值都有一定程度的减少,这样也更加符合实际情况,构件通过自身的变形,能够减少刚性接触与冲击,这也证明了以前视构件为刚性体的计算值比实际测量值大的原因。
3.3振动仿真结果
运用Adams自带的Vibration模块,施加上述所计算得到的激励力,分别对曲柄连杆机构进行刚体和柔性体的振动仿真,得到结果如图4、图5所示:其中V1表示连杆质心处测点,V2表示曲柄质心处测点,V3表示活塞销质心处测点。从上面的仿真结果可以看出,对构件进行柔性处理后,系统的振动特性发生了很大变化。系统的高频振动响应更加趋于稳定,能很好地解释往复泵振动特性明显的原因[6]。从结果还可以看出,柔性处理后,系统在低频阶段的振动占据很大能量,这也是当前振动减振降噪注重低频阶段的原因。将曲柄连杆机构的振动仿真结果与实际测量值对比,柔性化后的仿真结构更加接近实际你情况。
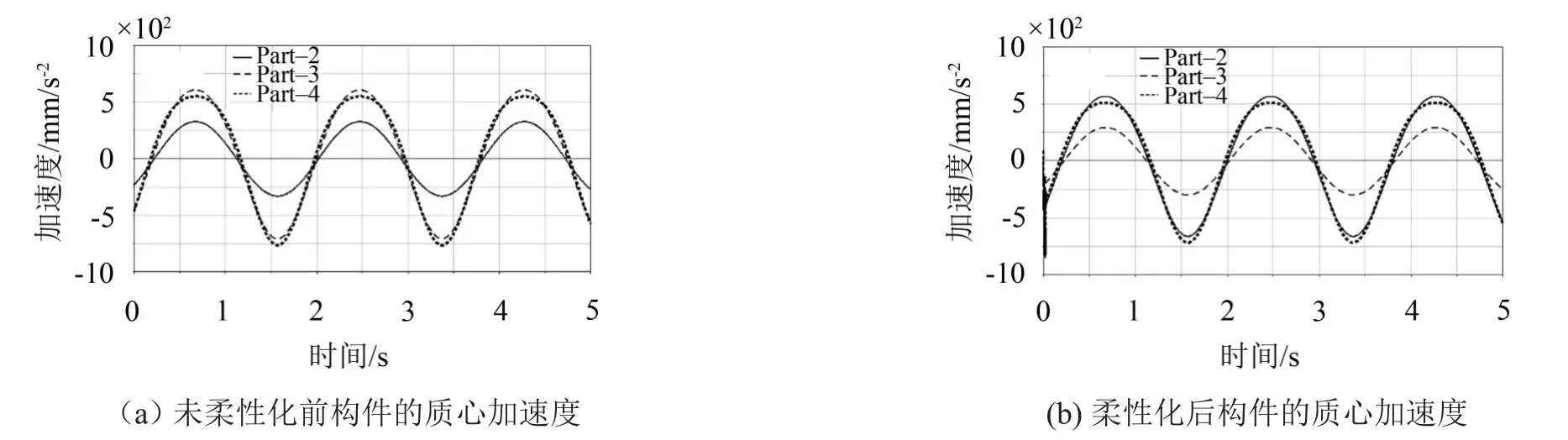
图3 各个构件质心加速度图
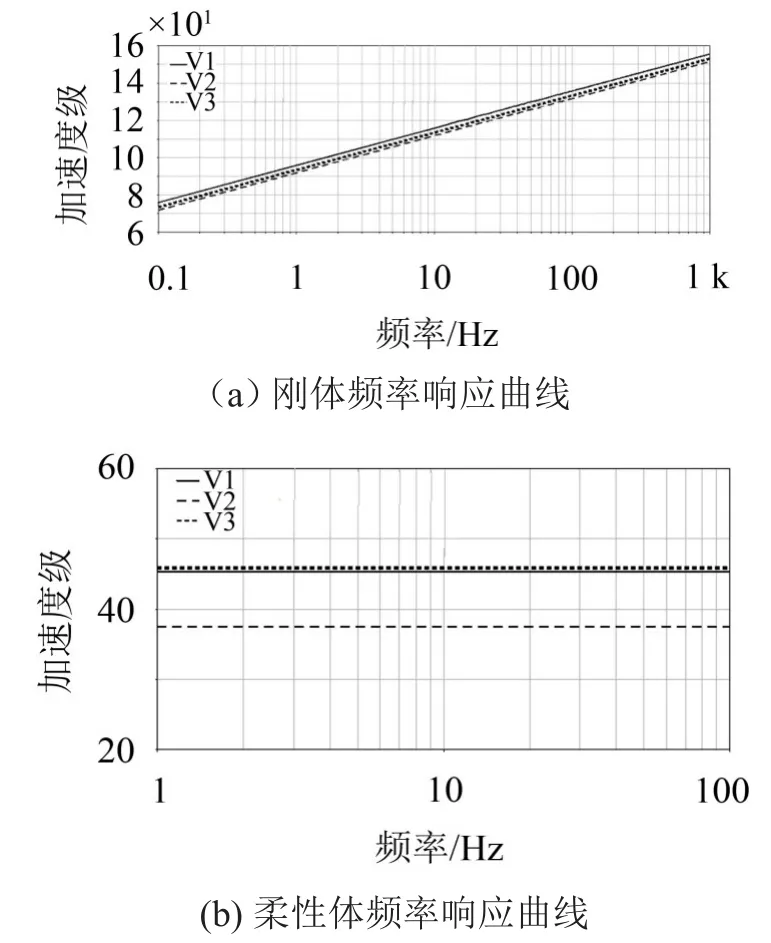
图4 频率响应曲线

图5 模态参与因子
4 结语
本文首先运用多体系统动力学理论,对曲柄连杆机构进行运动学和动力学分析,得到其运动学和动力学方程。然后运用多体动力学软件Adams,分别对曲柄连杆机构进行了刚性体和柔性体运动学,动力学和振动仿真分析,得到结论如下
(1)对于曲柄连杆机构等运动强度大,变形相对比较大的构件,对其进行柔性处理,更加符合其实际工作情况和振动特性,对机构进行力源计算与分析,能从根本上找出引起振动原因,分析故障机理,为低噪声修理工作提供理论依据和参照标准。
(2)对于曲柄连杆机构,低频的稳态噪声仍然是其主要噪声源,应该在运行过程中采取降低转速,增加强度等措施,来降低低频稳态噪声。
[1]王绍军.舱底泵运动组件动力学分析与故障诊断研究[D].哈尔滨:哈尔滨工程大学,2012.
[2]凤霞,司景萍.基于UG、ANSYS和ADAMS的联合仿真研究[J].公路与汽车,2010(3):4-6.
[3]刘旭亮.柔性机械臂建模及动力学特性分析[J].噪声与振动控制,2014,34(6):7-11.
[4]徐玉秀,杨文平.发动机结构振动与故障诊断理论技术[M].北京:电子工业出版社,2015.
[5]谢向荣,俞翔,朱石坚.基于ADAMS的柔性基础振动系统隔振性能分析[J].振动与冲击,2010,29(3):185-188.
[6]李增刚.ADAMS入门详解与实例[M].北京:国防工业出版社,2014.
[7]谢向荣.柔性板基础隔振系统的柔性多体动力学理论建模[J].噪声与振动控制,2010,30(6):58-62.
[8]袁东红,华锁宝.往复泵振动和噪声机理分析及减振降噪措施[J].中国舰船研究,2009,4(5):75-85.
VibrationAnalysis of the Crank-link Mechanism of Reciprocating Bilge Pumps
XIA Jiang-min1,LIU Hai-bing2,ZHANG Zhen-hai1,ZHU Shi-jian1,YUXiang1
(1.Ship and Power Engineering Institute,Naval Univ.of Engineering,Wuhan 430033,China;2.People's LiberationArmy 4805 Factory Shanghai Shipyard,Shanghai 200136,China)
Reciprocating bilge pump has a complex structure,high loading intensity and stable line-spectral components.It is always the research focus of ship's mechanical vibration and noise reduction.In this paper,applying the rigid and flexible multi-body dynamics theory,kinematics and dynamics calculation is done for the crank-link mechanism of the reciprocating bilge pump.The frequency and magnitude of its main excitation force are analyzed.By means of the Adams software,the kinematics and dynamics simulation is done and the system vibration response is analyzed.The results show that with the flexible multi-body dynamics theory,the vibration characteristics of the mechanism can be revealed more accurately.This work has important reference value in reciprocating pump design and low noise improvement.
vibration and wave;bilge pump;crank-link mechanism;multi-body dynamic;kinematics
TH113.1
ADOI编码:10.3969/j.issn.1006-1335.2016.03.031
1006-1355(2016)03-0151-04
2015-11-20
夏江敏(1990-),男,湖南省益阳市安化县人,硕士。主要研究方向为振动噪声控制,多体系统动力学。E-mail:570674280@qq.com
猜你喜欢
设备管理与维修(2021年17期)2021-11-02
河北省科学院学报(2020年1期)2020-05-25
中学物理·高中(2019年8期)2019-09-20
重型机械(2019年3期)2019-08-27
制造技术与机床(2018年11期)2018-11-23
科技创新与应用(2018年27期)2018-09-29
新商务周刊(2017年5期)2017-10-16
中南大学学报(自然科学版)(2016年2期)2017-01-19
海军航空大学学报(2015年1期)2015-11-11
中国自行车·骑行风尚(2014年2期)2014-05-07