
水下检测与清污机器人R0V模态切换模块设计与实现
2016-10-13 10:42常路林仁义刘海舰陈伟曾庆军
电子设计工程 2016年10期
常路,林仁义,刘海舰,陈伟,曾庆军
(江苏科技大学电子信息学院,江苏镇江212003)
水下检测与清污机器人R0V模态切换模块设计与实现
常路,林仁义,刘海舰,陈伟,曾庆军
(江苏科技大学电子信息学院,江苏镇江212003)
文中提出了一种面向水下结构检测与清污、多功能、模块化、模态切换的新型ROV(Remote1y Operated Vehic1e)设计方案,利用So1idWorks软件完成各子模块的虚拟建模、结构布置和虚拟装配,着重研究了可使ROV在浮游和爬行模态之间自由切换的模态切换模块设计并加工完成。开展了水池自航实验,在多次实体调平和水密实验后,结果表明,通过上位机控制系统实现了对ROV的灵活操控,航行稳定性较好,并能实现定航和定深功能,样机各模块性能较好地达到设计要求。
水下机器人;虚拟建模;模态切换;控制系统
水下结构检测与清污机器人是有缆遥控水下机器人(Remote1y Operated Vehic1e,ROV)的一种,它具有机动灵活、动力充沛、作业深度大、续航力强和环境适应性强等特点,被广泛应用于水下观察、海洋勘探、海洋平台的安装与维修、海洋管线的铺设与检修以及水下考古等作业。ROV通过脐带缆与水面联系,既需要执行传统的水下任务,又可实现近距离结构检测,以及水下结构物、堤坝、船底等清污作业。因此,开展水下结构检测与清污机器人控制系统的研究对于海洋工程的发展具有十分重要的意义[1_2]。
文中研制一种面向海洋工程水下结构检测与清污的新型有缆遥控水下机器ROV,该ROV是一种多功能、模块化、模态切换ROV。本文将重点介绍ROV的总体设计,模态切换模块机械设计、控制系统设计,整体调试与实验几方面。
1 R0 V的总体设计
1.1R0V设计要求
文中研制一种面向海洋工程水下结构检测室的ROV,该ROV是一种多功能、模块化、模态切换的ROV,通过水面控制平台控制水下潜航体自由运动,进行水下结构检查作业,在有需要时可以模态切换成爬壁模式,进行爬壁清污作业。
1)能够在浅水中进行浮游勘察作业,能够完成4个自由度(上浮下潜、前进后退、左转右转、俯仰)的运动;
2)能够实时采集水下摄像头的视频并且录制下来,进行水下结构检测,能够获取水下机器人的深度、姿态、温度等传感器信息并且保存下来;
3)能够在爬行状态下,贴住水坝、船底等物体表面,可以进行近距离检查和清污作业。
1.2R0V技术参数
海洋工程水下结构检测的ROV适用范围更广、功能更多、并且模块化设计安装。如下表1是ROV关键技术参数。
1.3R0V系统结构
根据上述设计指标,将ROV系统分为水面控制系统和水下控制系统两个子系统,它通过脐带缆连接进行信号、能源的传输。本体结构采用开架式结构,这种结构方便设计制造安装,也方便设备的添加和更换,在缆控型水下机器人中应用广泛。水下机器人由摇杆、PC机、控制箱、脐带缆和水下机器人本体组成,小型水下机器人不需要中继器。
如图1所示是ROV系统总体结构框,水面控制系统包括电脑、鼠标、摇杆和水面控制台,其中把电源、通信设备做进一个机箱内变成一个便于携带的水面控制箱,上位机软件和输入设备装在笔记本电脑上,操控水下机器人运动并实时显示水下传感信息和视频信息。
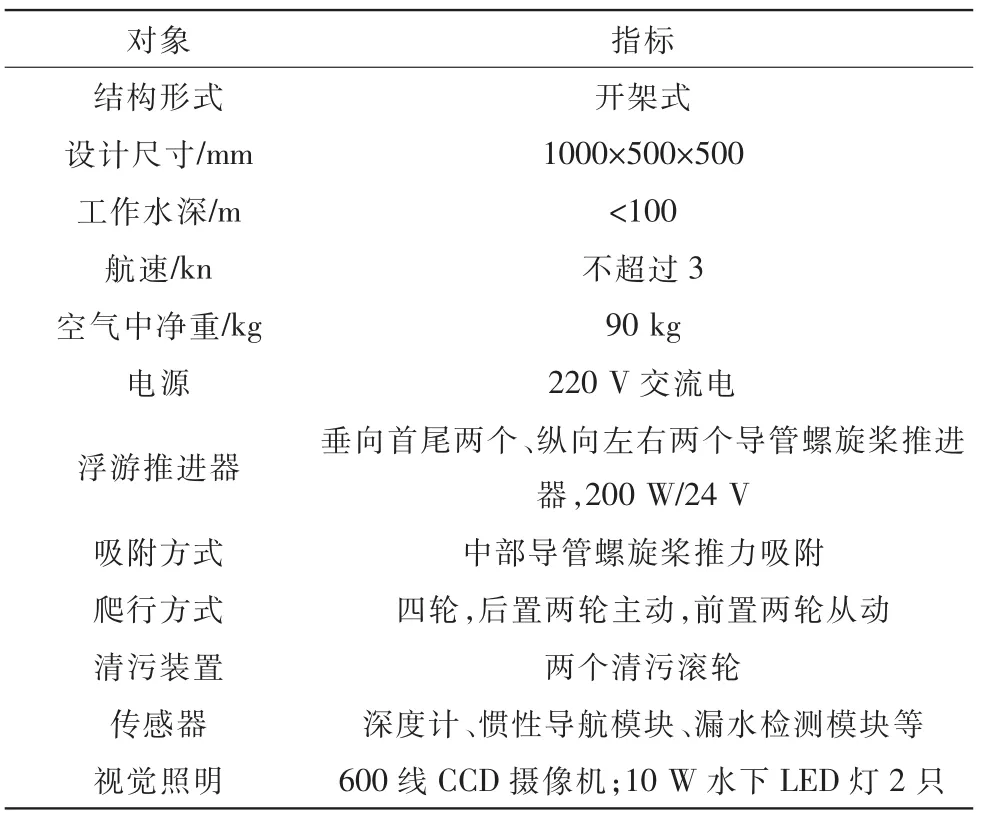
表1 MC-R0V关键技术参数
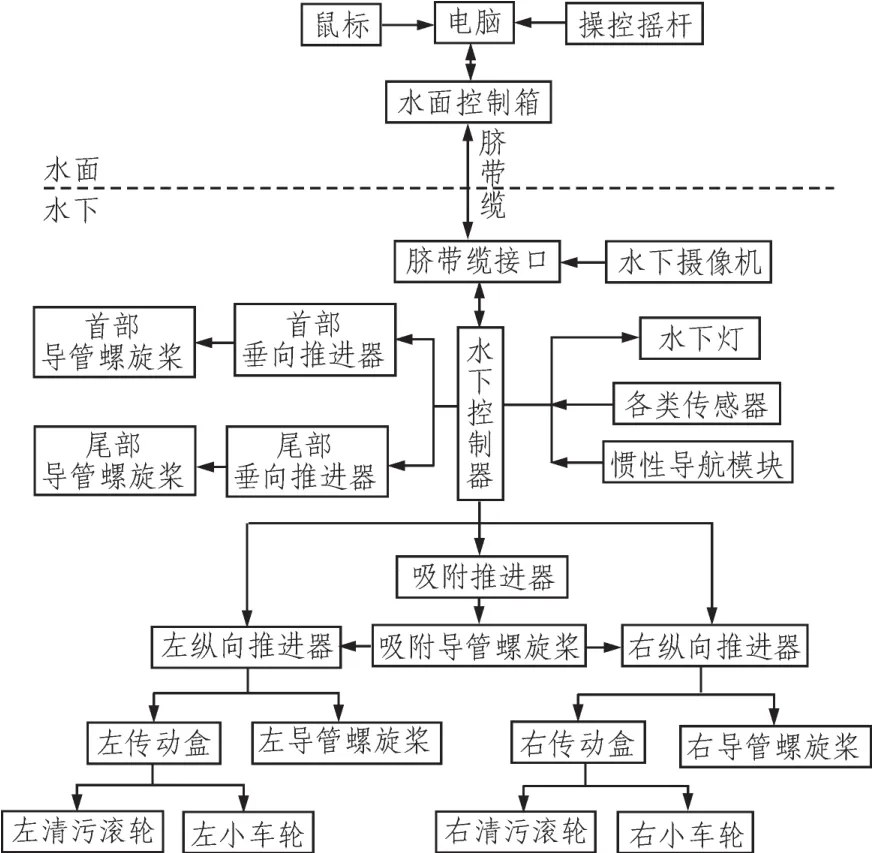
图1 ROV系统总体结构框图
1.4R0V本体设计及工作原理
水下潜航体主要是一个能够携带各种检测设备、导航装置、作业设备、水下控制器、推进器的载体。本文设计一种容易拆装、方便布置和安装设备的模块化开架式载体。设计时要考虑的问题有:各模块体积形状对水下潜航体自稳性、操纵性影响、模块设计制造问题、各部分吸水率问题、载体框架强度问题、设备拆装方便性问题和外形设计符合指标性等问题。
如图2所示,水下潜航体由十个主要部分组成,包括:①载体框架;②浮体;③从动轮模块;④控制舱;⑤驱动舱;⑥视觉照明模块;⑦垂向推进模块;⑧纵向推进模块;⑨模态切换模块;⑩爬行清污模块。载体框架作为搭载基础,是由螺栓连接的钢制矩形框架结构;浮体被4个浮体连接件安装在载体框架的上部,3个大圆孔为推进器的导流通道;载体框架前部下方安装有从动轮模块,两个万向轮可作为前置从动轮;控制舱安装在载体框架的前部中下层;驱动舱放在控制舱上,并与从动轮模块可靠固接;视觉照明模块安装在载体框架前部中上层,包括两个水下LED照明灯和一个水下摄像机;载体框架中层首尾对称布置安装两个垂向推进模块,由导管螺旋桨推进器以及各种连接零件组成;一对纵向推进模块是由尼龙齿轮驱动导管螺旋桨,左右对称安装在载体框架的两侧;模态切换模块安装在载体框架的中部;两个爬行清污模块是由尼龙齿轮驱动主动车轮和清污滚轮,左右对称安装在载体框架的尾部下层两侧。
ROV入水后,水下传感器将水下信息实时反馈到上位机端。根据传感器返回信息,操控人员利用上位机软件或操纵摇杆来控制ROV水下作业,水下潜航体靠自带的推进器进行浮游运动,并利用水下摄像机进行水下勘察作业。当接近目标壁面后,打开吸附推进器控制模态切换模块改变纵向电机动力作用点,从而实现浮游和爬行两种模态的切换:当纵向电机与纵向螺旋桨齿合时可实现机器人4自由度浮游运动[3];当纵向电机与传动盒上齿轮齿合时实现机器人的爬行清污作业;同时传动盒可以给后置的两个车轮和清污毛刷传输动力,在爬行时吸附推进器提供贴壁反推力。ROV多功能,模块化的设计与开发有助于零件的更换与维修,整个系统制造成本低、加工方便简单、供电系统能耗较小;同时可以在壁面爬行和清污,也可以浮游时进行勘察作业,活动范围广。
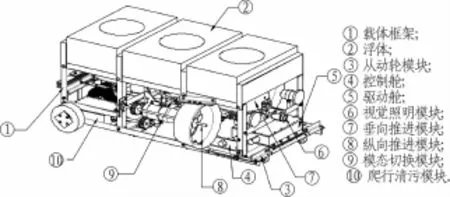
图2 水下本体结构布局
2 模态切换模块设计
2.1模态切换模块结构设计
2.1.1设计原理
模态切换模块是ROV中的核心模块,操作者可以通过水面控制平台控制机器人水下作业,实现机器人浮游勘察和爬行清污作业,并可以在浮游和爬行模态之间进行自由切换。
本模块使用so1idwork完成模态切换模块的虚拟建模,使用基于有限元计算软件Simu1ation模态切换模块进行强度校核,使其设计强度和刚度均满足使用要求[4];ROV可以在浮游和爬行模态之间自由切换,可代替潜水员进入较深水域和危险环境进行工作,对水下结构进行监察与清污作业。ROV设计为浮力略大于自身重力,如果作业过程中出现电路异常或遇到紧急情况可自动紧急上浮,保证机器人安全[5]。模态切换3D建模及主要功能部件如图3所示。
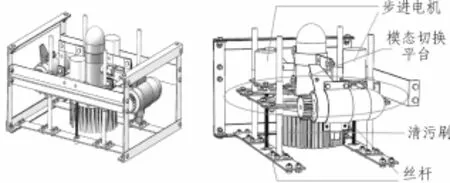
图3 3D建模及主要功能部件
2.1.2模块工作原理
将连接步进电机的丝杆滑台垂直固定在模态切换平台上,靠丝杆滑台进行模态切换[6]。在水下机器人进行浮游模态到爬行模态切换时,通过步进电机的丝杆来控切换平台,实现模态的切换,接下来控制清污刷子的运转,从而达到清污目的,同时纵向电机可以控制水下机器人的贴壁爬行。爬壁清污状态结束后,切换平台在螺杆的作用下向上运动,运动到上边界时,尼龙齿轮与纵向推进模块的尼龙齿轮啮合,可为纵向螺旋桨提供动力,垂向推进模块保证机器人悬浮,水下机器人可以进行浮游作业。切换平台上装有上下两个行程开关,当切换过程结束时立刻停止步进电机运转。对整个控制系统进行联调,通过水池试验证明水下机器人模态切换装置的可行性和可靠性。
MC_ROV工作在浮游监测与爬壁清污状态时模态切换模块与其他模块的啮合情况分别如图4和图5所示。
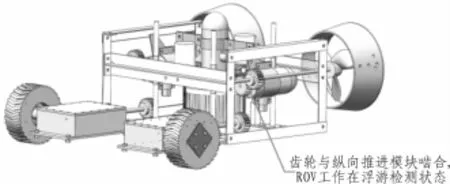
图4 浮游检测状态
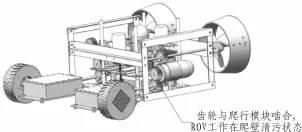
图5 爬壁清污状态
现有的市场化的水下机器人一般为检测型或为专业清污型,它们的外形设计都不足以使两者结合起来[7],但是我们设计的ROV是一款面向海洋工程水下结构检测与清污、多功能、模块化模态切换的新型ROV,模态切换驱动装置是其关键部件,可在浮游和爬行模态之间自由切换,使其能胜任浮游检测和爬壁清污工作模式。
2.2模态切换模块控制系统设计
2.2.1硬件设计
由于模块对精度要求较高,为了良好实现切换功能,我们选用步进电机作为其驱动电机,步进电机是将电脉冲信号转变为角位移或线位移的开环控制元步进电机件。可以通过控制脉冲个数来控制角位移量,通过控制脉冲频率来控制电机转动的速度和加速度,达到准确定位和调速的目的[8]。
上位机和下位机采用USB转rs232通讯,波特率为9 600 bps。一次成功的通信包含上位机对下位机准确发送控制信号和下位机对上位机发送正确的反馈信息。基于RS_ 232C标准串口定义,只需要使用数据发送、数据接收和共同地线这3根线,即采用“三线制接法”[9]。
电机采用57步进电机,配以BL_TB6560_V2.0驱动器[10],采用89C52单片机控制电机,硬件框图如图6所示。
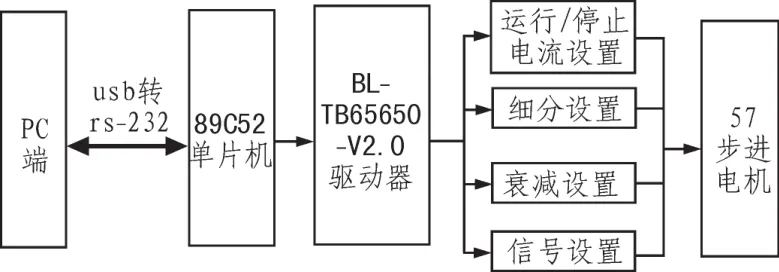
图6 模块硬件框图
2.2.2上位机监控软件设计
任何监控系统都离不开人机交互界面的设计,它是人与计算机之间传递信息的中介和接口,它把信息的机内形式转换成人类可以接受的信息,如图像、声音、光电、振动等,所有需要人和计算机交流的领域都有人机交互界面HMI的应用[11]。
ROV水面控制系统的监控软件采用VB编写,它一方面负责鼠标信息,将这些信息转换成控制指令传送给水下机器人电机控制系统,另一方面显示水下控制系统返回的各种速度信息。如图7为结构框图。操作者可以鼠标点击相应按钮实现模态切换模块中两个步进电机的起停、正反转动及加减速控制,当模态切换完成时,行程开关自动停止电机运转。
数据通讯通过VB中的MSComm控件实现,它提供了一系列标准通信命令的接口,它允许建立串口连接,可以连接到其他通信设备(如Modem)[12]。
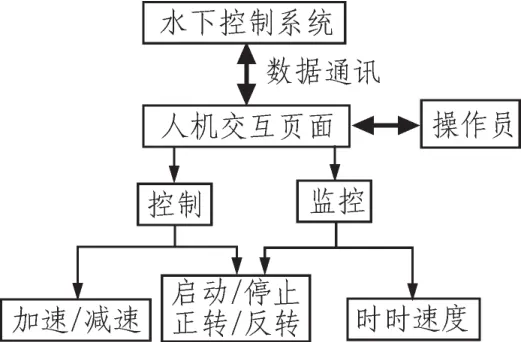
图7 监控软件结构框图
2.2.3下位机软件设计
水下机器人下位机软件开发采用了美国Kei1 Software公司出品的Kei1 μVision4开发环境,它供了包括C编译器、宏汇编、链接器、库管理和一个功能强大的仿真调试器等在内的完整开发方案,通过一个集成开发环境(μVision)将这些部分组合在一起[13]。本系统采用C语言进行开发,C语言程序简洁易读,语言结构性好,可移植性强。
51单片机是水下控制系统的核心,下位机软件基于该单片机编写,需要时刻控制电机的运行,还需要不断与上位机进行通信[14]。如图8所示为下位机软件程序结构框图,程序分为主程序和中断程序两部分,主程序是处理器在24 MHz主频下,不断循环运行,主要有系统初始化程序,延时程序,电机低速正转程序,中断程序是使处理器对外部或外部发生的事件能够实时处理而设置,包括电机的起停转向和调速控制。
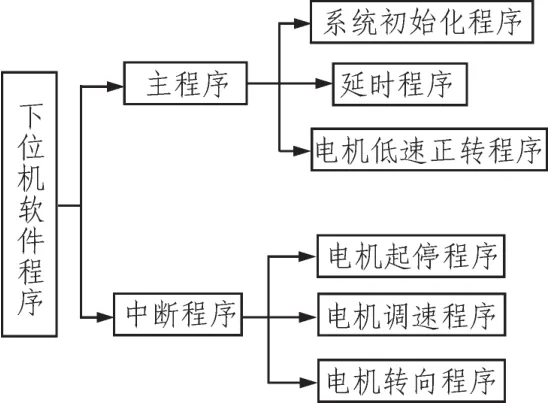
图8 软件结构框图
3 水下实验与结果分析
3.1水下定航实验
定航是水下机器人的主要功能之一,也是衡量水下机器人性能的主要指标之一[15]。在MC_ROV系统中设定期望航行角后,利用导航传感器记录MC_ROV水下实际航行数据。将实验数据导入MATLAB,按照导航解算步骤编写程序,绘制出定航曲线图,如图9所示。分析定航曲线图后可知,MC_ ROV系统定航响应快,超调小,稳定时间在20秒以内,航向稳定后误差范围在3°以下,满足定航要求。而误差产生的原因主要是由于惯性器件误差随时间累积导致导航效果变差。如图10是航向角稳定后,MC_ROV在水下定航行驶。
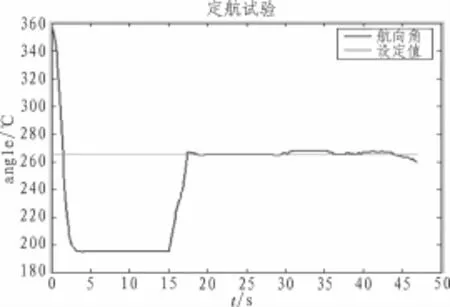
图9 MC_ROV定航实验曲线图

图10 MC_ROV定航实验
3.2水下定深实验
与定航一样,定深也是检验水下机器人性能的主要指标之一。在MC_ROV系统中设定期望航行角后,利用深度传感器记录MC_ROV水下实际航行数据。定深曲线图与定深误差曲线图分别如图11与图12所示。分析2个图可知,定深实验开始后,MC_ROV大约需要15 s左右才能达到预定深度;误差基本上在0~0.2 m范围内波动。其主要原因有3个:一是选取的推进器功率稍小,动力略显不足;二是定深设备固有误差较大,在35 cm左右;最后是因为水流压力的随机性对深度传感器造成了不确定性影响。
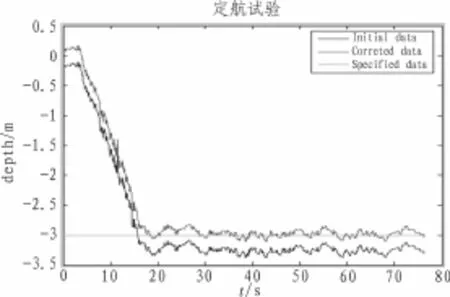
图11 MC_ROV定深实验曲线图
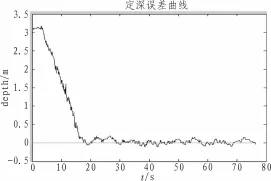
图12 MC_ROV定深误差曲线图
4 结论
针对一种面向海洋工程水下结构检测与清污、多功能模态切换的新型ROV,开发了一套水面水下控制系统。水面控制系统包括电源、操控摇杆和上位机软件,本体包括水下控制器、视觉照明模块、水下传感设备动力推进单元。可实现遥控和监控两种模式下的中等范围搜索和定点观测,并可在浮游和爬行模态之间自由切换。水下实验表明:ROV机械、控制系统软硬件和通信都正常运行,定航、定深功能运行良好,能够实现两种模态之间的切换,实现了水下结构检测与清污功能,满足使用要求。
[1]王宇鑫.“海螺一型”ROV控制系统结构与艏向控制技术研究[D].杭州:浙江大学,2012.
[2]MU Ling-ji,Car1os Sardinha,CHEN Chin-yin,et a1.Remote1y operated vehic1e system imp1ementation in Open-Water[C]//Proceedings of the 2nd Internationa1 Conference on Inte11igent Techno1ogies and Engineering Systems(ICITES2013).Springer Internationa1 Pub1ishing,2014:553_560.
[3]周风余,李贻斌,吴爱国.高压巡线机器人的设计与实现[J].机械科学与技术,2006(5):623_626.
[4]陈建军,车建文.结构动力优化设计述评与展望[J].力学进展,2001(2):181_192.
[5]金伟,许恒建,柳玉起,等.基于So1idWorks平台的板料成形参数化模拟技术[J].塑性工程学报,2001,18(6):70_75.
[6]刘景林,王帅夫.数控机床用多步进电机伺服系统控制[J].电机与控制学报,2013,17(5):80_86.
[7]徐玉如,李彭超.水下机器人发展趋势[J].自然杂志,2011,33(3):125_132.
[8]古志坚.基于单片机的步进电机控制系统研究[D].广州:华南理工大学,2013.
[9]艾长胜,章勇,鞠红.单片机与PC机三线制高速串行通讯[J].信息技术,2002(4):2_4.
[10]卢贶,宋霞.基于TB6560步进电机驱动系统的设计[J].武汉船舶职业技术学院学报,2013(4):36_40.
[11]赵嫚,方卫宁,穆建成.地铁调度员工作站人机交互界面设计研究[J].铁路计算机应用,2014,23(6):49_54.
[12]李旭东,陈俊杰.基于VB中MSComm控件的通信软件开发与实现[J].电脑开发与应用,2007(7):25_27.
[13]陈晓莉,张俊涛.KEIL C51单片机仿真器的设计[J].微计算机信息,2006,22(5):19_21.
[14]赵学军.单片机与组态王的通信程序设计[J].工业控制计算机,2006(9):35_37.
[15]姚峰.水下机器人基础运动控制体系结构及运动控制技术研究[D].哈尔滨:哈尔滨工程大学,2012.
Deslgn and lmPlementatlon of R0V mode sWltch module for underWater detectlon and cleanlng robot
CHANG Lu,LIN Ren-yi,LIU Hai-jian,CHEN Wei,ZENG Qing-jun
(School of Electronics and Information,Jiangsu University of Science and Technology,Zhenjiang 212003,China)
In this paper,a new ROV(Remote1y Operated Vehic1e)design scheme is proposed,which is based on the detection of underwater structure,the function of the system,the modu1e and the mode switch.The So1idWorks software is used to comp1ete the virtua1 mode1ing,structure 1ayout and virtua1 assemb1y of the sub modu1es,and the design and processing of the mode switch modu1e which can make the ROV between the f1oating and the craw1ing modes are studied.The experiments of the water poo1 in the air are carried out.The resu1ts show that the contro1 system can achieve the f1exib1e contro1 of ROV and the navigation stabi1ity is good.
remote1y operated vehic1e;virtua1 mode1ing;dynamic mode1s;simu1ation
TN02
A
1674_6236(2016)10_0166_04
2015_12_01稿件编号:201512004
国家自然科学基金项目(61503162);江苏省自然科学基金项目(BK20150473);江苏省大学生创新训练创业计划项目(201510289015Z)
常路(1994—),男,江苏镇江人,硕士研究生。研究方向:先进控制技术与应用。
猜你喜欢
成都信息工程大学学报(2022年4期)2022-11-18
昆明医科大学学报(2022年3期)2022-04-19
防爆电机(2021年3期)2021-07-21
防爆电机(2021年3期)2021-07-21
防爆电机(2021年1期)2021-03-29
潍坊学院学报(2020年2期)2021-01-18
流行色(2019年10期)2019-12-06
能源(2016年2期)2016-12-01
环境科技(2016年2期)2016-11-08
广西科技大学学报(2016年1期)2016-06-22
