
基于模糊预测PID算法的地下空间湿度控制*
2016-09-21 03:06:02张晓程王荣浩邢建春
动力学与控制学报 2016年4期
张晓程 王荣浩 邢建春
(解放军理工大学国防工程学院, 南京 210007)
基于模糊预测PID算法的地下空间湿度控制*
张晓程王荣浩†邢建春
(解放军理工大学国防工程学院, 南京210007)
根据防护工程地下空间空调系统的时滞以及非线性特性,结合预测控制和模糊控制两种方法,设计了基于模糊预测PID算法的控制器.建立了系统的数学模型,并基于所提出的控制方法对其进行仿真研究,结果显示该控制器抗干扰能力较好,相较于传统PID控制,该控制器调节时间更快,控制效果更佳.
地下空间,预测控制,模糊控制,空调系统
引言
目前已有的控制方法,如经典控制、现代控制等在空调大时滞系统控制方面都已有很多应用[1].相较于地面空间防护工程,地下空间具有其特殊性:(1)工程内部环境温度受外界气温和太阳照射波动很小,防潮防湿是工程内部热湿环境的主要问题;(2)密闭空间导致的工程自然通风性能差;(3)复杂的用途需求导致对工程内部不同区域的环境质量要求差别较大;(4)地下工程中空调能耗占比大,新风负荷大,换气次数多,湿度影响大;(5)空调系统是一个大时滞非线性系统.基于以上特性,地下空间空调系统的精确控制模型很难得到,单一运用常规的PID控制,难以实现高效、节能的运行指标.
本文针对复杂的空调大时滞系统设计了基于模糊预测PID算法的控制器.预测控制具有适应复杂过程、滚动优化等优点[2],PID作为有效的传统控制算法,已被广泛使用于工程中,结构简单且参数易于调整[3].而且,由于不能建立被控对象精确的数学模型,选用模糊控制可以减小对模型的依赖程度[4].基于以上优点,预测控制应用在闭环控制回路,通过提前预测输出值减少时滞,而模糊控制则应用于主回路,用以增加系统的鲁棒性、稳定性.
1 空调系统湿度模型
由于系统控制对象是房间湿度,其动态特性一般可采用带延迟的一阶模型近似描述,可调节的特性参数有放大系数K、传递滞后τ与时间常数T[5].由于受控房间的围护结构、湿度要求、送风方式、换气次数和室内设备不同,测得的结果也不相同[6].这里引用国内常采用的估算公式[7],如表1所示.
表1 房间湿度模型估算表
表1中各符号的意义如下:
N:单位时间(小时)房间的换气次数;a,b,c:房间长、宽、高(米).
本文以某防护工程的地下房间为研究对象,长×宽×高为15米14米6米,N=15次/小时,采用侧面送风.
按表1估算公式计算:

(1)
(2)
(3)
所以,房间湿度调节对象的经验数学模型为:
(4)
2 基于模糊预测PID的控制器设计
基于模糊预测PID控制器的基本思想是将由预测部分得到的最优输入与给定输入的误差变化率和误差作为模糊PID控制器的输入,然后通过模糊化、模糊推理、解模糊等,在线调整PID控制器的参数,再作用到被控对象上,得到预测部分的输入值,进而对系统进行预测控制.控制框图如图1所示.
图1 基于模糊预测PID的控制器框图Fig. 1 Control chart based on fuzzy predictive PID
2.1输出量预测
2.1.1预测模型
动态矩阵控制(Dynamic Matrix Control,DMC)首先要测定对象单位阶跃响应的采样值:
ai=a(iD),i=1,2,…,n
(5)
其中D为采样周期.对于渐近稳定的对象,其动态信息可近似用模型向量:
(6)
来描述,n为建模时域.
因为线性系统具有比例等性质,故利用模型向量ai来预测对象未来时刻的输出值.在k时刻初始预测值为:
(7)
从当前时刻起,在M个连续的控制增量Δu(k),…,Δu(k+M-1)作用下,未来时刻的输出值为:

(8)
以上输出值可用向量形式表示:
(9)
其中

其中P是优化时域长度,M是控制时域长度。
2.1.2滚动优化
minJ(k)=
ΔU(k)TRΔU(k)
(10)
其中Yω(k)是输出期望值矩阵,YP(k)是输出预测值矩阵,Q是误差权矩阵,R是控制权矩阵[8].
滚动优化是以参考轨迹作为优化目标,通过最优控制算法使某项性能指标在未来一定时间内最小,利用控制作用序列计算预测偏差,但只执行当前的控制作用并在下一时刻重复执行.
预测控制是通过实施Δu(k),采集k+1时刻的输出,完成新的预测→优化→校正过程.优化过程随着时间的推移其优化目标也随着改变,是一个在线反复运行的过程.
2.1.3反馈校正


(11)
利用这一误差信息用启发式加权方法预测未来的输出误差,并以此补偿基于模型的预测,可得到经校正的预测向量,即:
(12)

2.2主回路模糊控制
模糊PID控制器是以误差变化率ec与误差e为输入变量,并找出PID三个控制参数与输入变量的模糊关系,再经模糊化、模糊推理及解模糊,输出PID参数修正量ΔkP、ΔkI、ΔkD并用其对PID参数进行在线实时修正,以满足在系统输入不同时对控制参数的不同要求,从而使被控对象具有良好的动、静态性能及较好的稳定性.
2.2.1模糊化

表2 模糊化表格
2.2.2参数整定原则
参数整定原则包括:(1)当ec和e相差不大时,应取较小的KP以减小系统超调,KD应取较小值,同时KI也应取适当值来保证系统的响应速度;(2)当e较大时,为了使系统的跟踪性能较好,应取较大的KP与较小的KD,为避免出现过分饱和现象,同时使KI趋近于0;(3)当e较小时,为使系统拥有较好的动、静态性能,应取较大KP和KI.
但其中最关键的原则是满足控制要求,即最适合要求的PID参数才是最好的.比如说,湿控回路是个过程回路,最大值不能超过允许范围,那最合适的PID参数值的KP作用可能要稍微小点,尽管响应时间可能比理论的慢了,衰减比也不是4∶1或10∶1,但是不超调,就是最佳的.
2.2.3模糊控制规则表建立
根据PID各参数对空调性能的影响及参数整定的原则,可以得出针对ΔkP、ΔkI、ΔkD分别整定的模糊控制规则表,如表3、表4和表5所示.

表3 ΔkP的模糊控制规则表

表4 ΔkI的模糊控制规则表

表5 ΔkD的模糊控制规则表
3 仿真验证
按照上述思想,建立防护工程地下房间的湿度控制系统仿真原理图,如图2~图5所示.
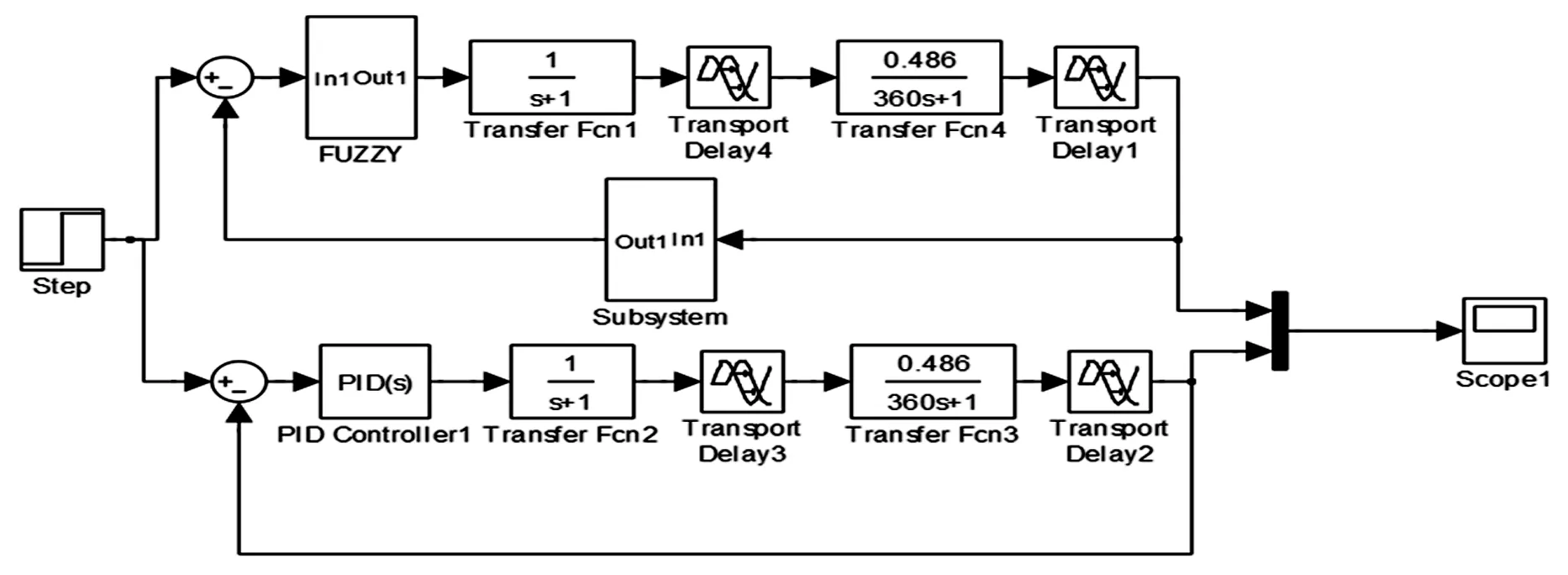
图2 基于模糊预测PID算法的仿真原理图Fig. 2 The principle diagram based on fuzzy predictive PID algorithm
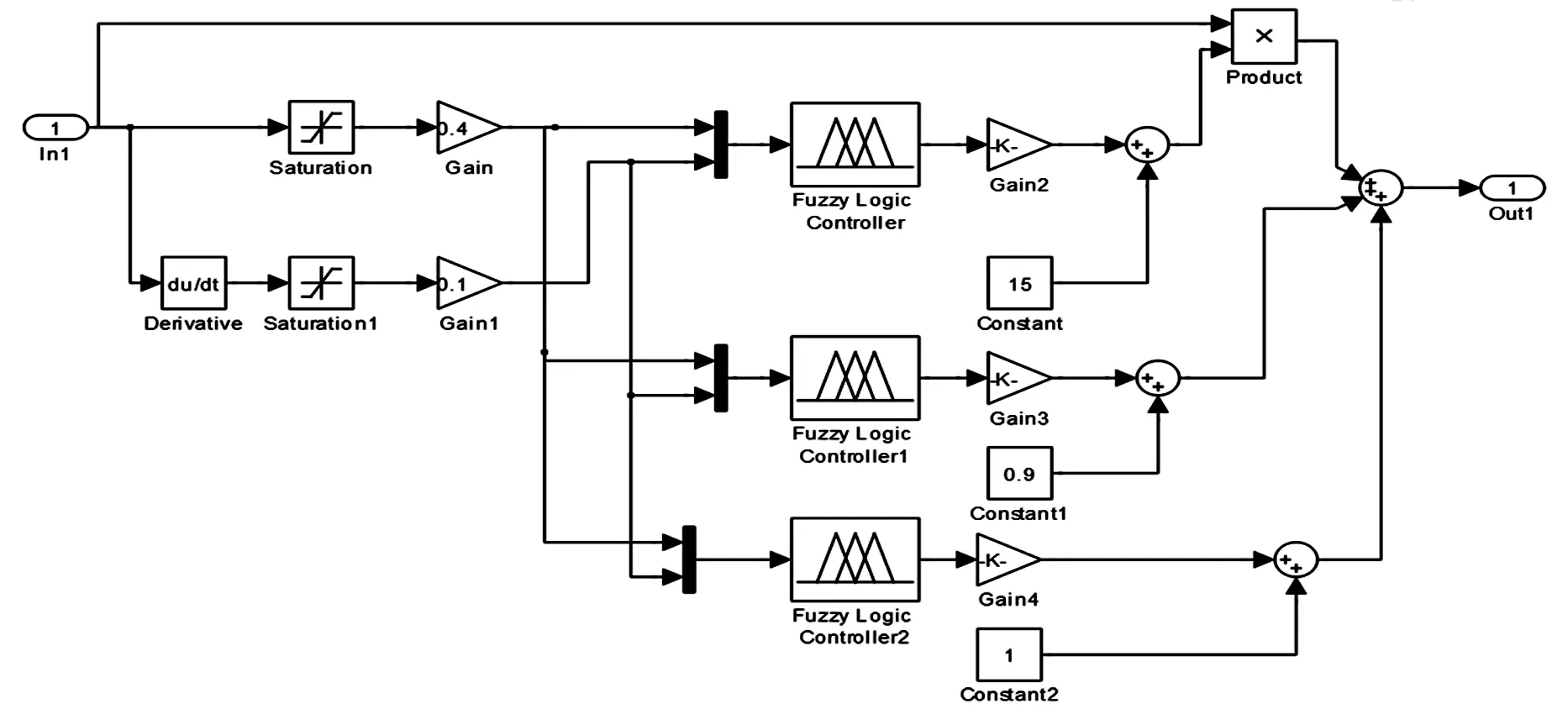
图3 模糊控制器内部封装原理图Fig. 3 The principle diagram of fuzzy controller

图4 预测控制器内部封装原理图Fig. 4 The principle diagram of predictive controller
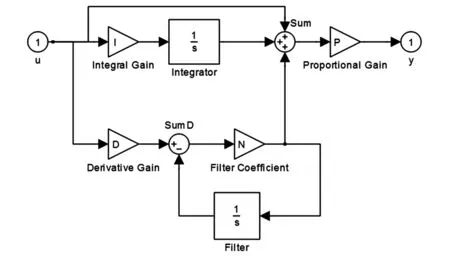
图5 PID控制器内部封装原理图Fig. 5 The principle diagram of PID controller
预测控制模块中,预测优化时域P=1,控制时域M=1,采样周期D=5s.模糊PID模块中,通过试凑法得到:KP=16.1,KI=1.05,KD=1.005,e和ec分别取值为0.1、0.4,仿真时间设定为500s,系统设定的阶跃输入为1(相当于地下空间室内空气质量标准中要求的室内空气湿度标准50%~70%[10]),得到系统输出响应如图6所示.将PID控制器和基于模糊预测PID算法的控制器的控制效果汇总在一个坐标系中,通过观察系统响应,对控制效果进行比较.

图6 系统输出响应图(P=1)Fig. 6 Output response of the system(P=1)
从图6中可以看出,本文算法的峰值为1.018,调节时间为379.6s,超调量为1.5%,上升时间为121.4s,稳态值为1.003;而传统PID算法的峰值为1.126,调节时间为456.6s,超调量为11.8%,上升时间为207.6s,稳态值为1.007.仿真结果表明,本文算法的控制器的调节时间更快,与PID控制器作比较,震荡更少,超调量更小,稳态误差更小.
预测控制模块中,预测优化时域P=10,控制时域M=1,采样周期D=5s.模糊PID模块中,通过试凑法得到:KP=14.3,KI=0.95,KD=1,e和ec分别取值为0.1、0.4,仿真时间设定为500s,系统设定的阶跃输入为1,得到系统输出响应如图7所示.将PID控制器和基于模糊预测PID算法的控制器的控制效果汇总在一个坐标系中,通过观察系统响应,对控制效果进行比较.

图7 系统输出响应图(P=10)Fig. 7 Output response of the system(P=10)
从图7中可以看出,本文算法的峰值为1.03,调节时间为415.3s,超调量为2.5%,上升时间为128.3s,稳态值为1.005;而传统PID算法的峰值为1.126,调节时间为456.6s,超调量为11.8%,上升时间为207.6s,稳态值为1.007.仿真结果表明,本文算法的控制器的调节时间更快,与PID控制器作比较,震荡、超调量及稳态误差都更小.
下面考虑加入噪声(图8)的影响,对图9、图10进行分析.
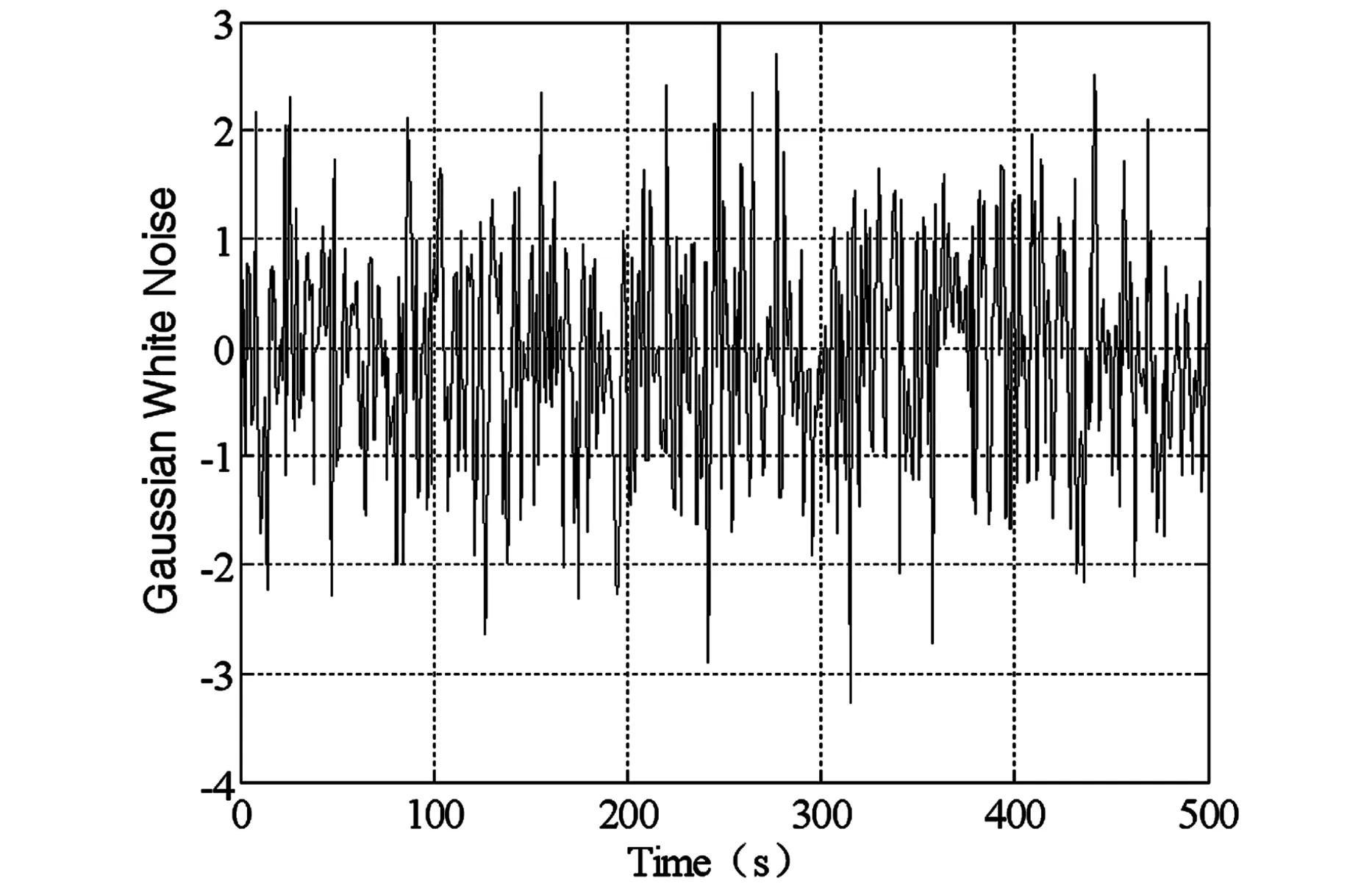
图8 高斯白噪声曲线图Fig. 8 Gaussian white noise-time curves

图9 抗扰动输出仿真图(P=1)Fig. 9 Disturbance attenuation-time relationship(P=1)

图10 抗扰动输出仿真图(P=10)Fig. 10 Disturbance attenuation-time relationship(P=10)
加入如图8所示的高斯白噪声,当预测时域 P=1时,得到抗扰动输出仿真如图9所示;当预测时域P=10时,得到抗扰动输出仿真如图10所示.从图中可以看出,过程控制输出对噪声扰动具有一定的抑制作用,表明本文算法的抗干扰性较好.
1方新,王金娥.空调温湿度智能控制技术的研究.机电工程技术,2014,43(11):93~96 (Fang X, Wang J E. Research on intelligent control technology for air conditioning temperature and humidity.Mechanical&ElectricalEngineeringTechnology, 2014,43(11):93~96 (in Chinese))
2师五喜,霍伟,吴宏鑫.柔性关节微操作机器人自适应模糊预测控制.动力学与控制学报, 2003,1(1):84~89 (Shi W X, Huo W, Wu H X. Adaptive fuzzy predictive control of a micromanipulator with flexible joints.JournalofDynamicsandControl, 2003,1(1):84~89 (in Chinese))
3赵健康,戴金海.基于MATLAB模糊控制器的预测跟踪控制仿真分析.计算机仿真, 2004,21(9):28~30 (Zhao J K, Dai J H. Forecast-tracking control for attitude maneuver of spacecraft using MATLAB fuzzy controller.ComputerSimulation, 2002,21(9):28~30 (in Chinese))
4潘宇晨,蔡敢为,吴笃超.平面三自由度可控挖掘机构动力学建模与控制器设计.动力学与控制学报, 2014,12(1):67~73 (Zhou H X, Chen Z L, Li J. Dynamic modeling and controller design of a planar 3-D of controllable excavating mechanism.JournalofDynamicsandControl, 2014,12(1):67~73 (in Chinese))
5杨成晨,张九根.基于灰色预测模糊PID算法的空调房间温度控制.电子技术应用, 2012,406(4):56~59 (Yang C C, Zhang J G. Based on grey prediction fuzzy PID algorithm of air conditioning room temperature control.ApplicationofElectronicTechnique, 2012,406(4):56~59 (in Chinese))
6殷晔.基于模糊控制的温湿度试验箱建模及仿真[硕士学位论文]. 北京: 北京邮电大学, 2008 (Yin Y. Based on the fuzzy control of temperature and humidity experiment box modeling and simulation[Master Thesis]. Beijing: Beijing University of Posts and Telecommunications, 2008 (in Chinese))
7施俊良.基室温自动调节原理和应用.北京:中国建筑工业出版社,1983 (Shi J L. Room temperature automatic adjustment principle and application. Beijing: China Building Industry Press, 1983 (in Chinese))
8席裕庚.预测控制.北京:国防工业出版社, 2013 (Xi Y G. Predictive control. Beijing: National Defense Industry Press, 2013 (in Chinese))
9胡国龙,孔亚广,孙优贤.基于模糊规则的动态矩阵预测控制及其应用.中国造纸学报, 2002,17(1):106~109 (Hu G L, Kong Y G, Sun Y X. Fuzzy rules-based dynamic matrix predictive control and its application.TransactionsofChinaPulpandPaper, 2002,17(1):106~109 (in Chinese))
10程绍仁. 地下工程防潮除湿. 北京:国防工业出版社,1990(Cheng S R. Moistureproof and dehumidification of underground engineering. Beijing:Nation Defense Industry Press,1990(in Chinese))
*The project supported by Military 2110 Leading Academic Discipline Project (20130013) and the Pre-Research Foundation of PLA University of Scienceand Technology of China (FYZCJJ201502)
† Corresponding author E-mail: wrh@893.com.cn
17 March 2015,revised 03 June 2015.
HUMIDITY CONTROL OF UNDERGROUND SPACE BASED ON FUZZY PREDICTIVE PID ALGORITHM*
Zhang XiaochengWang Ronghao†Xing Jianchun
(CollegeofDefenseEngineering,PLAUniversityofScienceandTechnology,Nanjing210007,China)
According to the time delay and nonlinear characteristics of the air-conditioning system in the underground space of the protection engineering, the controller combining predictive control and fuzzy control is designed based on fuzzy predictive PID algorithm. The mathematical model of the system is developed and investigated though the proposed control method. The results show that the designed controller has good ability to resist disturbance. Compared with the traditional PID control, its accommodation time is shorter, and the control effect is much better.
underground space,predictive control,fuzzy control,air-conditioning system
E-mail: wrh@893.com.cn
10.6052/1672-6553-2015-060
2015-03-17收到第1稿,2015-06-03收到修改稿.
*军队2110重点学科建设资助项目(20130013)和解放军理工大学预先研究基金资助项目(FYZCJJ201502)
猜你喜欢
科学大众(2023年21期)2023-12-05 05:23:22
中国特种设备安全(2021年9期)2021-03-02 05:40:28
测控技术(2018年11期)2018-12-07 05:49:02
测控技术(2018年9期)2018-11-25 07:44:34
系统工程与电子技术(2016年7期)2016-08-21 13:59:14
西南交通大学学报(2016年3期)2016-06-15 20:29:35
电子制作(2016年21期)2016-05-17 03:53:01
通信电源技术(2016年5期)2016-03-22 01:09:57
西北工业大学学报(2015年4期)2016-01-19 03:31:55
电源技术(2015年11期)2015-08-22 08:50:38
