基于ADAMS的炮膛合力施加方法
2016-09-20 01:01:57程驰青
火炮发射与控制学报 2016年1期
程驰青,李 强
(中北大学 机电工程学院,山西 太原 030051)
基于ADAMS的炮膛合力施加方法
程驰青,李强
(中北大学 机电工程学院,山西 太原030051)
针对转管武器循环射击的特点,在ADAMS中以身管运动角度为参照,运用IF、SIN、AKISPL函数编写火炮循环射击载荷表达式,实现了在匀速、变速与延迟射击等不同射击条件下的炮膛合力施加方法,为转管武器的动力学仿真施加更真实的载荷提供了有利条件。
转管武器; 炮膛合力; ADAMS; 函数; 动力学仿真
转管武器具有射速高、结构紧凑、质量相对较轻、体积较小、动作可靠、故障率低、寿命较长和应用范围较广的优点。
由于转管武器在射击过程中身管组高速旋转,其炮膛合力具有不同于传统身管武器炮膛合力的特点,主要表现为在固定击发点击发,炮膛合力顺序作用,炮膛合力随身管组的旋转而周向滑移,若转速较高,相邻身管的炮膛合力可能出现叠加的情况。在ADAMS中进行虚拟样机分析时,在要求的击发位置与击发时间准确地触发炮膛合力,使其更接近转管武器的真实受力情况是进行后续研究转管武器动力学仿真的基础。文献[1-2]对这方面内容作过研究,虽然其存在不足之处,如添加的函数过于复杂,计算部分过多,但也对后来其他人的研究起到了重要的指导作用。
1 炮膛合力处理
1.1炮膛合力的计算
在弹丸沿膛内运动时期,膛底合力Ppt主要由火药气体对膛底压力Pt的总和与弹带对膛线的阻力Fr两部分组成,火药气体对膛壁摩擦力很小,可忽略不计。所以
Ppt=SPt-Fr
(1)
式中,S表示炮膛断面积。
粗略计算时,可以用平均压力P代替Pt,利用内弹道中膛内各截面压力的关系求出以平均压力P表示膛底合力Ppt。
由内弹道学可以得到膛底压力与平均压力之间的关系
(2)
此外,膛线阻力Fr在数值上等于
Fr=nN(sinα+fcosα)
(3)
式中:N表示导转侧压力;α表示缠角;f表示摩擦因数;n表示膛线数[3]。
综上所述,可得到平均压力P表示的膛底合力
(4)
弹丸飞离炮口后,火药气体开始从膛内流出,继续对炮身发生作用,直到膛内火药气体压力降至大气压力时为止[4]。由于后效期的复杂性,假设后效期内Ppt为时间的线性函数,即
(5)
式中:Pg表示后效期开始瞬间的膛底合力;t表示从后效期开始瞬间算起的时间。
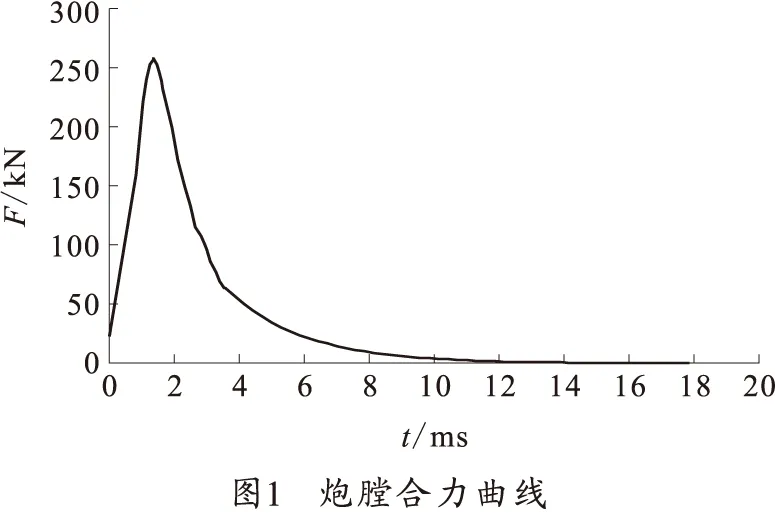
1.2炮膛合力曲线的处理
将上述理论公式导入Matlab中,用Matlab软件进行编程计算,获得炮膛合力曲线,如图1所示。再将曲线的坐标点以txt的形式导出,从而得到炮膛合力的坐标系列点。
2 炮膛合力施加
2.1顺序施加炮膛合力方法
转管武器射击时,炮闩和身管在行星体的驱动下绕中心轴转动,在转到击发位置时,炮闩在闭锁器与开锁器的作用下完成闭锁、击发、开锁的过程。每根身管转动Ai+360M角度时就会触发炮膛合力。式中,Ai为第i根身管的首发转角,i取1至6,M为正整数。所以,以每根身管的转动角度作为参考量来判断、循环触发炮膛合力。
为了简化模型和方便仿真,建立一个虚拟辅助圆盘[5],圆盘与行星体同轴。虚拟圆盘的转速大小和方向与行星体一致。在圆盘中心建一个与大地固定的点MARKER_fuzhuzhong。再在与每根身管同轴的位置建立2个点,一个与大地固定称为MARKER_fuzhudingi;一个与虚拟圆盘固定称为MARKER_fuzhudongi。然后再对每个根身管建立一个角度测量MEA_ANGLE_i(MARKER_fuzhudingi, MARKER_fuzhuzhong, MARKER_fuzhudongi)。

这样,每根身管的转动角度测量都会从0开始且单调递增。第i根身管在转动Ai角度时,会首次击发。当1#身管转动A1角度首次击发后,其余身管将会在转动A1+60(i-1)角度时首次击发。下面为了方便计算与表述清楚,取A1=42。
在首次击发之后,身管每转动360°就会再次击发,所以要建立一个以360°为周期循环变化的函数,采用SIN函数与IF函数结合的方法可以达到目的。
应用ADAMS中IF函数[6],使每根身管转动角度的正弦值大于一个数时便触发相应身管的炮膛合力。为了方便计算,采用使正弦值大于0.5时触发炮膛合力,第i根身管的炮膛合力触发函数为
IF(SIN((MEA_ANGLE_i-Xi)*2*pi/360)-0.5:0,0,FORCE_FPT)。
式中,IF函数是一个判断函数,其格式为IF(表达式1:表达式2,表达式3,表达式4),如果表达式1小于0,返回表达式2的值;如果表达式1等于0,返回表达式3的值;如果表达式1大于0,返回表达式4的值。MEA_ANGLE_i-Xi表示当第i根身管转动Ai时,减去Xi,其中Xi是每根身管的补角,其作用是使每根身管转动角度的正弦值正好等于0.5。例如1#身管A1=42,则X1=12;A2=102,则X2=72。由于转动角度是单调递增的,后续正弦值将会大于0.5,所以SIN((MEA_ANGLE_i-Xi)*2*pi/360)- 0.5将会大于0,此时会返回表达式4即炮膛合力。由于ADAMS中SIN函数的角度单位为弧度,故在测量角度后乘以2π/360将角度转化为弧度。FORCE_FPT表示炮膛合力。
理论计算得到的炮膛合力在ADAMS中表示为一系列数据点,只有将这些数据点正确拟合才能正确的施加炮膛合力,ADAMS中通常使用AKISPL函数来拟合力曲线。AKISPL函数是根据Akima方式得到插值,返回对应的自变量的因变量值,由于其没有平滑的导数,一般仅用于力中。
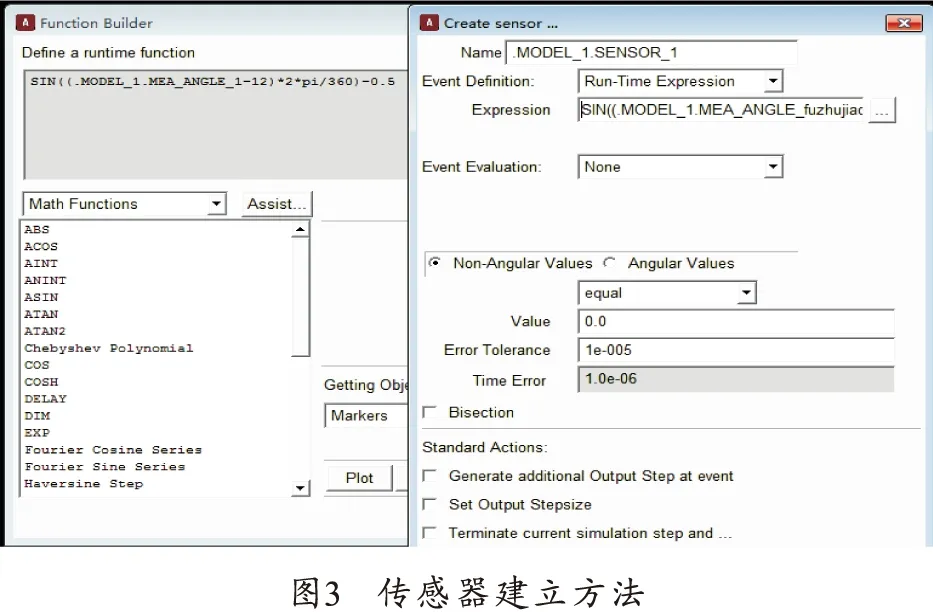
每根身管在旋转到击发位置时都要建立一个传感器,来监视每根身管是否到达击发位置,传感器的建立方法如图3所示,第i号身管的传感器函数为:
SIN((MEA_ANGLE_i-Xi)*2*pi/360)-0.5
传感器判断标准为函数的值是否为0,i取1至6。
1#~4#身管具体的炮膛合力拟合函数为:AKISPL(TIME-SENVAL(SENSOR_a) , 0 , SPLINE_FPT,0),a取1至4。SENVAL函数表示返回传感器函数满足判断标准时的值,即SIN((MEA_ANGLE_i-Xi)*2*pi/360)-0.5等于0时的时间。由于每次触发炮膛合力时,时间均不为0,导致AKISPL函数不能正确拟合力曲线,所以要在每次触发时让第1独立变量的时间等于0,故第1独立变量取TIME-SENVAL,以保证在每次触发炮膛合力的时候,第1独立变量等于0且随着时间呈线性变化,这样才能正确拟合炮膛合力曲线。
由于5#和6#身管的首发旋转角度分别为A5=282,A6=342,则5#和6#身管的Xi分别为X5=252,X6=312。在仿真开始时5#和6#身管的旋转角度正弦值,即sin(-252°)与sin(-312°)均大于0.5,满足炮膛合力的触发条件,将使仿真开始时就会触发炮膛合力,但这是不正确的。故要添加一个IF函数,使5#、6#身管只有在旋转一定角度之后才能触发相应的炮膛合力。综上所述5#、6#身管的炮膛合力施加方式为
AKISPL(TIME-SENVAL(SENSOR_b),0,SPLINE_FPT,0)*IF(MEA_ANGLE_b-(Ab-2):0,0,1),b取5,6。
式中添加的IF函数约束了5#、6#身管只有在旋转了(Ab-2)°之后才能正确触发炮膛合力。综上所述,完整的炮膛合力施加方式见表1。
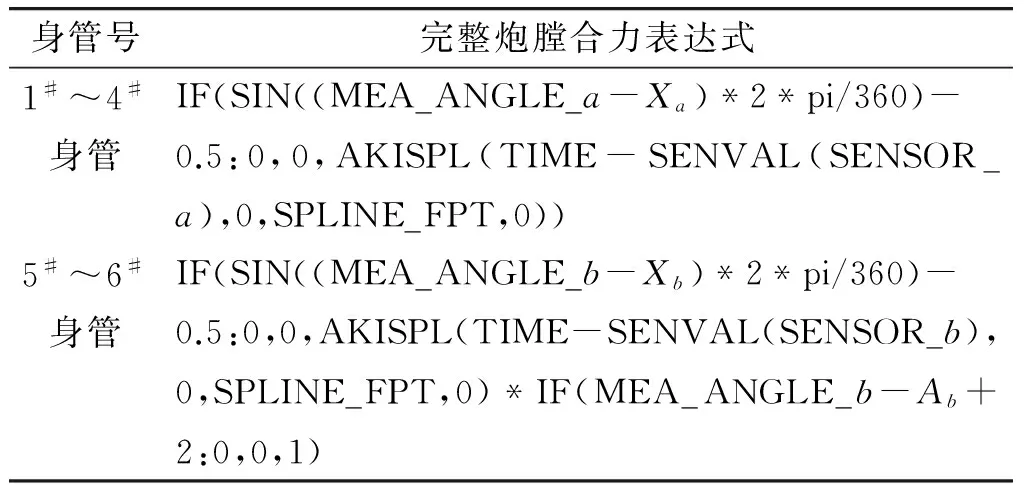
表1 每根身管完整炮膛合力表达式
2.2延迟施加炮膛合力方法
同样利用添加IF函数的方法,可以实现每根身管空转若干圈之后再触发炮膛合力。因为在实际情况中,转管武器的首发启动是由外能源驱动,身管组要空转若干圈之后,再实现供弹、击发,从而转化为内能源。通过IF函数施加延迟更接近实际的炮膛合力,将为后续的转管武器动力学仿真提供有利条件。具体施加方法是在每根身管的炮膛合力表达式后加上*IF(MEA_ANGLE_i-M*360:0,0,1),式中M取正整数。
2.3其他数量身管转管武器炮膛合力施加方式
在实际情况中,不同的转管武器,其身管数量可能是不同的。以同样的方法,也可以适用于p(p≥3)管转管武器的炮膛合力施加。假设每根身管的首发角度为Ac,c取1至p。当1#身管转动A1角度首次击发后,其余身管将会在转动A1+(c-1)*(360/p)角度时首次击发。按照上文介绍的方法,建立每根身管的MAKER点、角度测量、传感器。需要注意的是,若第d根(d取1至p之间的一个数)身管的Xd的值在210与360之间,如上文提到X5=252,X6=312。则在第d~p根身管的一般表达式后面加上IF(MEA_ANGLE_e-(Ae-2):0,0,1),e取d至p。同样利用IF函数也可以实现p根身管转管武器的延迟击发,方法与6管转管武器的施加方法相同,故不再赘述。
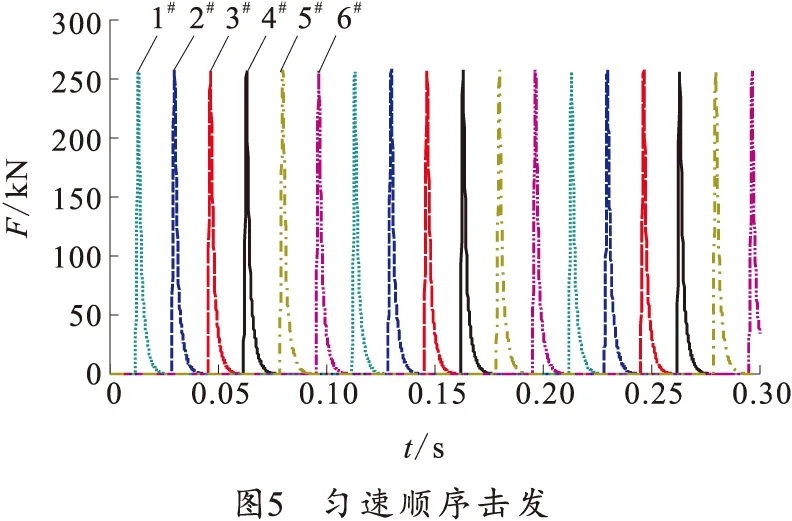
2.4炮膛合力仿真
在每根身管的膛底中心添加单方向作用力,将力的函数设置成上述表达式,然后在ADAMS中进行仿真并返回仿真结果,不同工况条件下,获得的炮膛合力施加曲线如图4~6所示。

3 结束语
以身管在运动过程中转过的角度为自变量,综
合运用IF、AKISPL、SIN、SENVAL函数成功实现了转管武器炮膛合力在匀速、变速与延迟射击等不同工况条件下的击发,更好地符合转管武器实际的工作情况,为后续设计的动力学仿真提供了有利条件,比如缓冲装置设计、武器架座受力分析等,对同类结构仿真分析也具有一定的参考价值。
References)
[1]米中贺,王毅,李战旗,等.转管武器炮膛合力在ADAMS中的实现方法[J].火炮发射与控制学报,2011(12):46-49.
MI Zhonghe,WANG Yi,LI Zhanqi,et al.Realization me-thod of Gatling gun bore resultant force based on ADAMS software[J].Journal of Gun Launch & Control,2011(12):46-49.(in Chinese)
[2]刘杰,李强,周强.转管武器炮膛合力施加方法研究[J].火炮发射与控制学报,2013(2):38-41.
LIU Jie,LI Qiang,ZHOU Qiang.Method of Gatling gun bore resultant force loading[J]. Journal of Gun Launch & Control,2013(2):38-41.(in Chinses)
[3]毛保全,张金忠,杨志亮,等.车载武器发射动力学[M].北京:国防工业出版社,2010:38-41.
MAO Baoquan,ZHANG Jinzhong,YANG Zhiliang,et al.Launch dynamics of vehicle weapons[M]. Beijing:National Defense Industry Press, 2010: 38-41.(in Chinese)
[4]高跃飞.火炮反后坐装置设计[M].北京:国防工业出版社,2010:11-15.
GAO Yuefei.Design of recoil system of guns[M]. Beijing:National Defense Industry Press, 2010: 11-15.(in Chinese)
[5]郑建荣.ADAMS——虚拟样机技术入门与提高[M].北京:机械工业出版社,1990:171-176.
ZHENG Jianrong.ADAMS:accidence and improvement of virtual protype technology[M].Beijing:China Machine Press,1990: 171-176.(in Chinese)
[6]郭卫东.虚拟样机技术与ADAMS应用实例教程[M].北京:北京航空航天大学出版社,2008:79-118.
GUO Weidong.Virtual prototyping technology and ADAMS application examples tutorial[M].Beijing: Beihang University Press, 2008: 79-118.(in Chinese)
Method of Gatling Gun Bore Resultant Force Loading Based on ADAMS
CHENG Chiqing, LI Qiang
(School of Mechatronic Engineering, North University of China, Taiyuan030051, Shanxi, China)
According to the characteristics of Gatling weapon firing cycle shooting, take the body tube movement angle as the reference in ADAMS. Carries on the circulation using the IF、SIN、AKISPL function to achieve under the different design of bore together method of applying such as uniform rotation, variable speed rotation. On under different working conditions for the simulation of the dynamics of Gatling weapon provides a closer to the actual loading condition.
Gatling gun; bore resultant force; ADAMS; function; dynamic simulation
2015-01-15
国家自然科学基金(51175481);国防基础科研资助(A0820132003)
程驰青(1990-),男,硕士研究生,主要从事武器动态图像识别与处理技术研究。E-mail:984937872@qq.com
TJ012
A
1673-6524(2016)01-0032-04
猜你喜欢
新技术新工艺(2022年12期)2022-02-14 07:32:18
陕西画报(2021年1期)2021-04-22 14:14:20
数学物理学报(2020年2期)2020-06-02 11:29:10
安顺学院学报(2020年1期)2020-04-05 10:57:20
当代工人(2019年11期)2019-07-10 14:59:10
舰船科学技术(2019年5期)2019-06-03 08:30:06
现代计算机(2019年6期)2019-04-08 00:46:50
机械工程师(2018年6期)2018-06-14 06:12:28
中国工程咨询(2015年10期)2015-02-14 05:57:38
中国火炬(2014年3期)2014-07-24 14:44:47