
一种新型4D动感座椅设备的设计与分析
2016-09-12 00:24Designandanalysisofnew4Dmotionplatformequipment
制造业自动化 2016年8期
Design and analysis of a new 4D motion platform equipment
邹晓晖,陈润六,王红州,郑小民ZOU Xiao-hui, CHEN Run-liu, WANG Hong-zhou, ZHENG Xiao-min(江西省机械科学研究所,南昌 330002)
一种新型4D动感座椅设备的设计与分析
Design and analysis of a new 4D motion platform equipment
邹晓晖,陈润六,王红州,郑小民
ZOU Xiao-hui, CHEN Run-liu, WANG Hong-zhou, ZHENG Xiao-min
(江西省机械科学研究所,南昌 330002)
设计了一种以三自由度平动3-PR(4R)R并联机构作为动力输入,多个两转一移3-RPS并联机构作为输出的新型动感座椅设备。分别对3-PR(4R)R并联机构和3-RPS并联机构进行了机构模型的位置分析,并建立了动感座椅设备执行机构的整体数学模型。通过MATLAB软件和Solidworks软件进行了动感座椅设备的虚拟仿真分析,验证了所设计的新型动感座椅设备的结构的合理性。得出该新型动感座椅设备非常适合应用在大型电影院4D影厅中的结论。
动感座椅;Solidworks仿真;MATLAB仿真;并联机构
0 引言
随着运动模拟器在动感影院的成功应用,4D电影已从小众体验开始向院线大规模的使用转变。目前市场上4D影院动感座椅采用的机械结构主要有两种:1)基于3-RPS并联机构的三自由度动感座椅;2)基于6-UPS并联机构的六自由度动感平台。六自由度动感平台具有非常强的运动模拟能力,常用于科技馆的虚拟现实体验和大型游乐场的运动仿真体验,但由于其自身转动运动时会造成平台周边与中心体感差异大的原因而不适合应用于体验观众多的大型4D体验馆——如座位数量很大的电影院。三自由度动感座椅只有模拟上下运动、左右摇摆、前后俯仰等动作的能力,但其可通过在同一场馆布局多套该类型动感座椅来满足多名观众同时体验的需求,因此现阶段大型电影院大都采用了3-RPS三自由度动感座椅设备。
3-RPS机构在动感影院领域的潜在价值也引起了科研人员的广泛关注:Tsai L W对3-RPS机构进行了运动学分析[1];安梓铭研究了3-RPS并联机构的模糊PID控制[2];朱逍、沈金荣研究了4D动感座椅的控制系统[3,4];付俭定研究了结合通用PC软硬件平台的动感影院运动控制系统的硬件设备[5];董赟研究了一套针对虚拟过山车的控制系统[6];霍电辉设计了一种新型三自由度动感模拟平台[7];王红州发明了一种三平动运动输入多重3-RPS机构运动输出的动感座椅设备[8]。本文设计了一种新型的4D动感座椅设备,采用一个三自由度平动并联机构作为运动输入,4个3-RPS并联机构作为运动输出的新型动感座椅设备。
1 新型动感座椅的结构设计
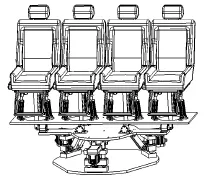
图1 动感座椅整体结构
该动感座椅设备由1个三平动并联机构及4个相同的3-RPS并机构组成,整体结构如图1所示。三平动并联机构的构型为3-PR(4R)R,其结构如图2所示。3-PR (4R)R并联机构由机架、平动台以及3条相同的PR (4R)R支链组成,PR(4R)R支链由滑块、第一转轴、第一连杆、第二连杆和第二转轴组成。PR(4R)R支链与机架和平动台的联接方式为:滑块通过移动副与机架联接,滑块通过转动副与第一转轴联接,第一转轴通过转动副与第一连杆和第二连杆联接,第一连杆、第二连杆通过转动副与第二转轴联接,第二转轴通过转动副与平动台联接。平动台在3条PR(4R)R支链的约束与驱动下可实现空间三维平动运动。3-RPS并机构由机架、动平台和3条相同的RPS支链组成,RPS支链由第一伸缩杆和第二伸缩杆组成,其结构如图3所示。机架、动平台和RPS支链的联接方式为:第一伸缩杆通过转动副与机架联接,第一伸缩杆通过移动副与第二伸缩杆联接,第二伸缩杆通过球面副(球铰)与动平台联接,动平台通过球面副(球铰)与三平动并联机构的平动台联接。动平台在3条RPS支链的约束下具有两维转动与一维移动的3个自由度。该动感座椅设备的座椅安装在4个3-RPS并联机构的动平台上,其初始位姿完全相同,在三平动并联机构平动台的带动下实现同步且一致的运动输出,整个机构的主动件为三平动并联机构上的三个滑块。
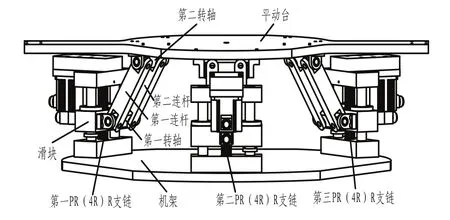
图2 3-PR(4R)R并联机构示意图
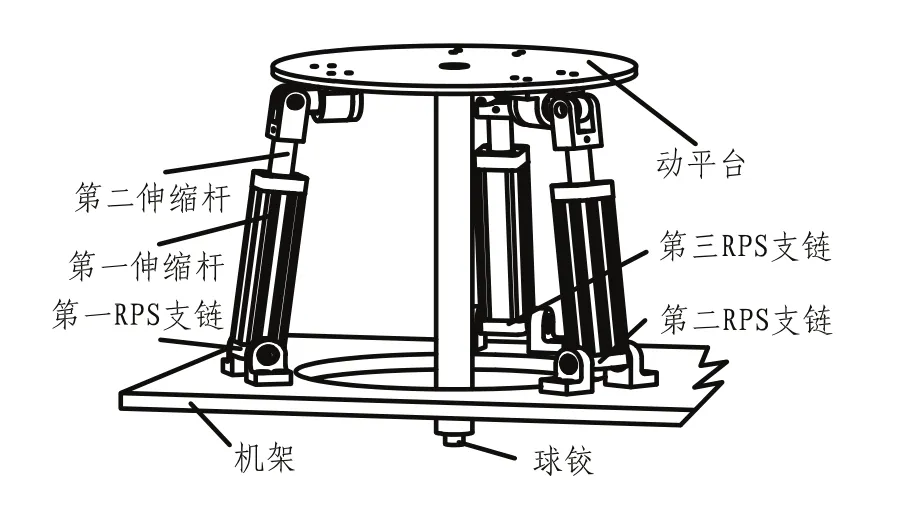
图3 3-RPS并联机构示意图
2 新型动感座椅的位置分析
为简化动感座椅执行机构的运动求解模型,首先单独分析3-PR(4R)R并联机构和3-RPS并联机构,然后再建立统一的数学模型。
2.13-PR(4R)R并联机构
3-PR(4R)R并联机构的平动台在3条PR(4R)R支链的约束下只能进行平动运动,其位姿由3个滑块决定。现建立机构的简化模型,以三个滑块中心在机架上投影所构成的正三角形的中心为原点O,以滑块运动方向为z轴,以其中两滑块初始位置连线方向为x轴,根据右手法则确定y轴方向,建立直角坐标系如图4所示。其中,Ai(i=1或i=2或i=3)为第i条支链中第一连杆、第二连杆与滑块联接中心连线的中点,Bi为第i条支链中第一连杆、第二连杆与平动台联接中心连线的中点。同样的,B1、B2、B3两两连线构成一个正三角形。

图4 3-PR(4R)R并联机构简图
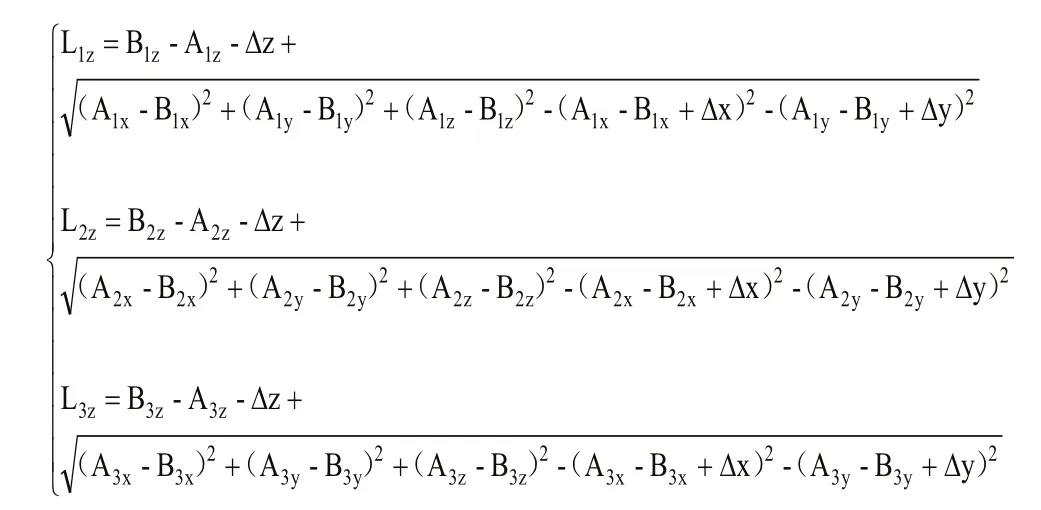
因为平动台是做平动运动,到所以其运动过程中B1、B2和B3点位置变化量相同,A1、A2和A3点的x、y轴的坐标是常量但z轴坐标是变量,且A1到B1的距离、A2到B2的距离和A3到B3的距离不变。以A1(A1x,A1y,A1z)、A2(A2x,A2y,A2z)、A3(A3x,A3y,A3z)、B1(B1x,B1y,B1z)、B2(B2x,B2y,B2z)、B3(B3x,B3y,B3z)为初始位置,以△x、△y、△z表示平动台在三个坐标轴上的位置变化,以L1z、L2z、L3z表示三个滑块在z轴方向的变化量,平动台在滑块上方(即Biz+△z>Aiz+Liz),则可得3-PR(4R)R并联机构的位置方程为:
2.23-RPS并联机构
新型动感座椅设备包含4个相同的3-RPS并联机构,每个3-RPS并联机构的动平台在3条RPS支链的约束下只能进行空间两维转动一维移动运动,其位姿由动平台上球铰的空间位置的变化量决定。现建立4个动平台的简化模型,以每个动平台中心为原点Oj(j=1或j=2或j=3或j=4),xj与x轴同向,yj与y轴同向,zj与z轴同向,建立直角坐标系如图5所示。动平台绕xj轴的转角为α,动平台绕yj轴的转角为β,原点Oj在Oxyz坐标系中沿z轴方向移动为Lz。
动平台运动过程中Oj只沿z轴运动且Oj与Sj的空间距离保持不变。以Oj(Ojx,Ojy,Ojz)和Sj(Sjx,SjY,SjZ)为初始位置,以α表示动平台绕xj轴的转角,以β表示动平台绕yj轴的转角,以Lz表示原点Oj在Oxyz坐标系中沿z轴方向移动,以△jx、△jy、△jz表示Sj在Oxyz坐标系中的位置变化,则可得到动平台的位置方程为:
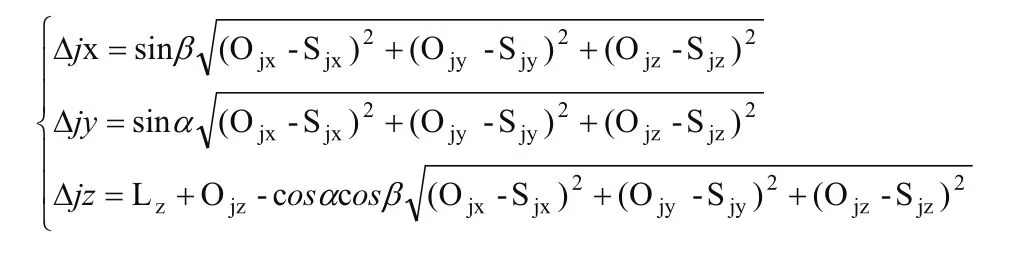

图5 动平台简图
2.3动感座椅设备的整体位置分析
由于3-RPS并联机构的动平台是由3-PR(4R)R并联机构的平动台带动Sj产生的运动,因此,Oj(Ojx,Ojy,Ojz)在三个坐标轴上的位置变化△jx、△jy、△jz与3-PR(4R)R并联机构的平动台在三个坐标轴上的位置变化△x、△y、△z相同,也就是△jx=△x、△jy=△y、△jz=△z。将动平台的位置方程代入3-PR (4R)R并联机构的位置方程中可得动感座椅设备的整体位置方程:

3 基于MATLAB的仿真分析
MATLAB是一种可视化的具有极为强大矩阵计算能力的编程语言,它包含有上百个预先定义好的命令和函数,这些函数能通过用户自定义函数进一步扩展。MATLAB除具有强大的矩阵运算能力外,同时还有着较强的二维、三维绘图能力。因此MATLAB非常适合在工业研究领域里解决各种问题,是一个十分有效的工具。
3.13-PR(4R)R机构的工作空间
根据上文得出的3-PR(4R)R机构的位置方程,应用MATLAB编写出求解的程序,进而绘出平动台的可达工作空间。
机构的初始位置为:A1(-257.61,-446.19,75)、A2(515.22,0,75)、A3(-257.61,446.19,75)、B1(-187.64,-325,282.16)、B2(375.28,0,282.16)、B3(-187.64,325,282.16),其中Ai在z方向上的活动范围为40≤Aiz≤150。
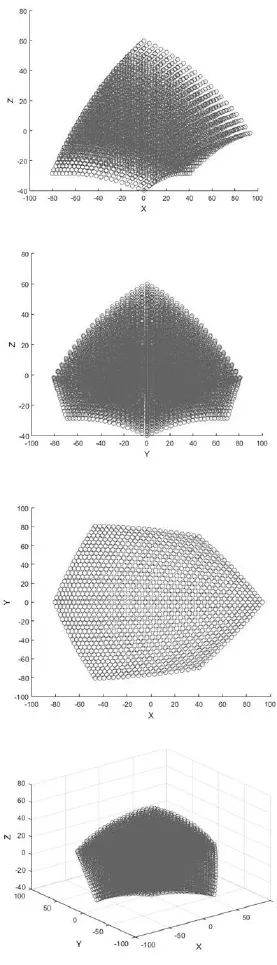
图6 平动台工作空间
根据MATLAB计算,绘出的3-PR(4R)R机构平动台工作空间如图6所示。
3.2动感座椅设备的运动仿真
设定一组动感座椅的动作:第1秒,座椅(动平台)绕y轴逆时针转8度;第2秒,座椅回到原位;第3秒,座椅绕y轴顺时针转8度;第4秒,座椅回到原位;第5秒,座椅绕x轴逆时针转8度;第6秒,座椅回到原位;第7秒,座椅绕x轴顺时针转8度;第4秒,座椅回到原位。
根据动感座椅设备的位置方程,应用MATLAB分别求取每个时间节点三个滑块的相对位移,进而求出滑块的速度、加速度,绘制出滑块的位移、速度及加速度曲线。如图7~图9所示。

图7 滑块位移曲线
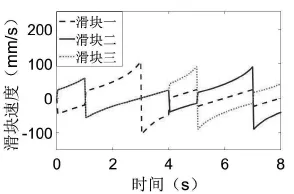
图8 滑块速度曲线
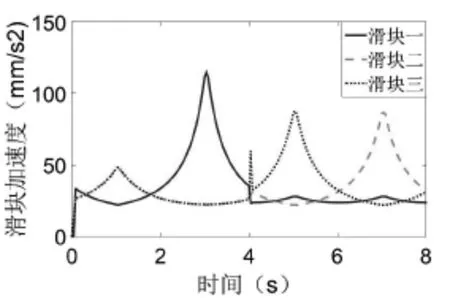
图9 滑块加速度曲线
4 基于Solidworks的仿真分析
Solidworks Motion是Solidworks软件中的一个插件,是一个虚拟原型机仿真工具,能实现全面的动力学和运动学仿真,并可得到系统中零件的作用力、反作用力、速度、加速度以及位移等运动参数。并且输出结果能以动画、图形以及表格等多种形式表示。此外,在复杂运动情况下,还能在其他有限元分析软件中输入零部件的复杂载荷情况,从而能对其结构和强度进行准确的分析。
首先,应用Solidworks软件,根据上文所述的条件,构建了一套动感座椅的虚拟样机(如图1所示)。然后将其加载到Solidworks Motion模块中,在其动平台上加载了三个线性驱动以进行运动学仿真。
输入与上文MATLAB仿真相同的动作,Solidworks Motion可直接求得滑块的位移、速度及加速度曲线,如图10~图12所示。对比MATLAB仿真与Solidworks仿真结构,可知上述位置方程的正确性,也可说明此结构可应用到动感座椅设备上。

图10 滑块位移曲线
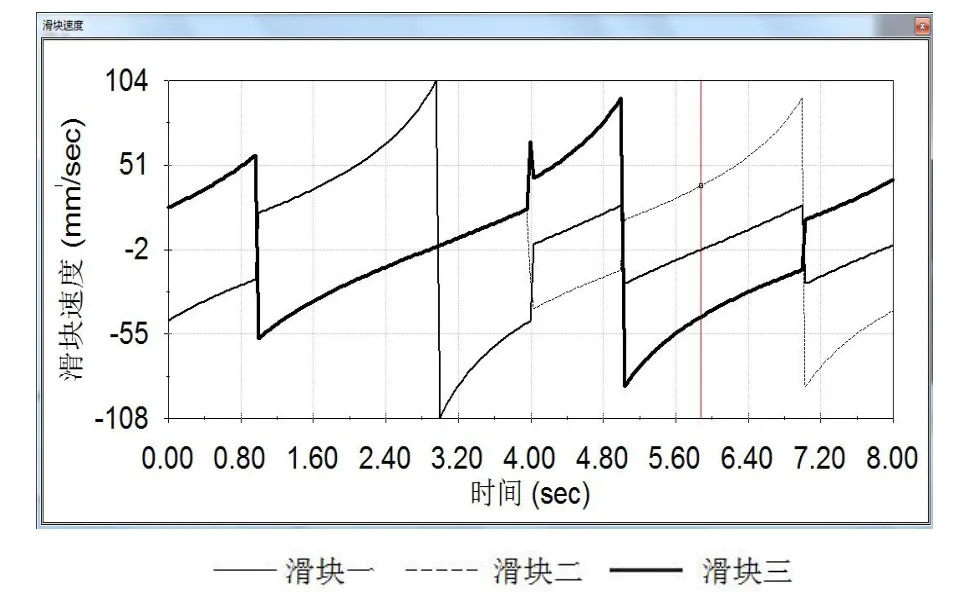
图11 滑块速度曲线
5 结束语
本文所分析的动感座椅设备采用了三平动运动作为输入,多个座椅同步实现两转一移运动的输出。建立了该设备执行机构的位置方程,并通过MATLAB计算与Solidworks仿真分析,验证了方程的正确性。该设备具有控制简单,成本较低的优点,非常适合应用在电影院中座位数多的4D影厅。
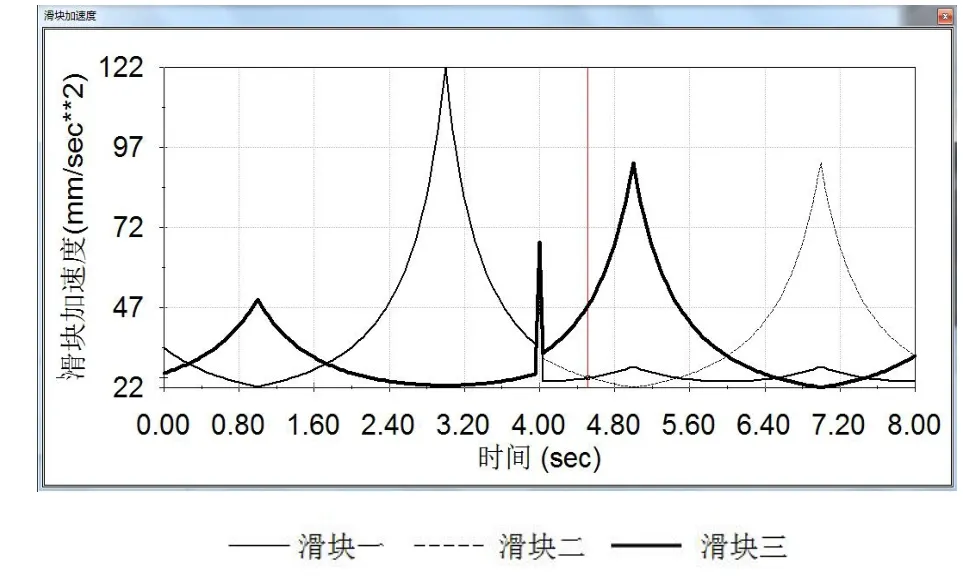
图12 滑块加速度曲线
[1] Tsai L W.Direct kinematic analysis of a 3-RPS parallel manipulator[J].Mechanical and Machine Theory,2003,38(1):71-83.
[2] 安梓铭,朱大昌,李雅琼,等.基于3-RPS型并联机器人模糊PID控制研究[J].制造业自动化,2014,36(8):15-18.
[3] 朱逍.4D影院动感座椅控制系统的设计与研究[J].控制系统,2010,26(12-1):92-94.
[4] 沈金荣,吕全亚,蔡昌春,等.4D动感数字电影控制系统的研究与实现[J].计算机测量与控制,2009,17(4):697-699.
[5] 付俭定.4D动感影院控制系统的研究与设计[D].秦皇岛:燕山大学信息科学与工程学院,2013.
[6] 董赟.基于虚拟现实技术的动感过山车系统的设计与开发[D].沈阳:东北大学信息科学与工程学院,2009.
[7] 霍电辉.新型三自由度动感模拟平台的研发[D].太原:太原科技大学机械电子工程,2013.
[8] 王红州.三平动输入多重3-RPS机构输出的4D特效座椅:中国,ZL201410319373.5[P].2016-01-20.
TH112
A
1009-0134(2016)08-0102-04
2016-06-17
江西省科技支撑重点项目(20151BBE50125)
邹晓晖(1976 -),男,江西南昌人,高级工程师,本科,研究方向为并联机构。
猜你喜欢
石油矿场机械(2022年3期)2022-06-17
农业机械学报(2021年10期)2021-11-09
装备制造技术(2020年2期)2020-12-14
中国自行车(2018年12期)2019-01-29
汽车实用技术(2017年16期)2017-09-21
北京航空航天大学学报(2014年1期)2014-12-19
中国机械工程(2012年15期)2012-07-25
汽车与新动力(2012年5期)2012-03-25
中学生数理化·高二版(2008年2期)2008-10-19
