基于运动信息的视频图像空间目标检测
2016-09-06 10:25张学阳项军华
海军航空大学学报 2016年2期
张学阳,项军华
(国防科学技术大学航天科学与工程学院,长沙410073)
基于运动信息的视频图像空间目标检测
张学阳,项军华
(国防科学技术大学航天科学与工程学院,长沙410073)
针对卫星拍摄的以深空为背景的视频图像中空间运动目标的检测问题进行了研究,提出了一种基于运动信息的目标检测算法。首先,通过均值滤波对图像进行降噪处理;然后,采用基于局部统计的可变阈值来分割单帧图像,使用灰度重心法计算像点坐标。当卫星凝视目标区域时,恒星可以认为是静止的,而目标依旧在运动,基于此,可检测出空间运动目标。基于某型卫星在轨拍摄的视频图像验证了算法的有效性。
空间目标检测;小目标检测;目标运动信息;局部可变阈值;视频图像
卫星通过姿态机动控制可以实现对某一兴趣区域进行“凝视”观测,获取目标区域连续的视频图像信息。视频图像比静止单幅图像包含更多信息,能够探测到动态事件的发生,并可以基于视频图像中的序列图像进行图像重构,以获得更高分辨率的图像,为抗灾救灾、战时监控、计划决策提供第一手资料[1]。
为此,许多国家投入大量资金和科技人员对该类卫星进行了广泛研究,国内外已发射了多颗具有视频成像功能的卫星。如SKYBOX公司的Skysat系列卫星[2]、德国柏林理工大学的TUBSAT系列卫星[3],印度尼西亚研制的LAPAN系列卫星[4],以及国防科技大学研制的天拓二号卫星[5],这些卫星都可以在轨获取不同性能的视频图像。
卫星对空间运动目标的观测,例如小卫星等,可以为卫星健康判断、太空安全监测等提供重要依据。由于天基平台的不稳定性,即使是凝视观测,背景和相机也会发生相对运动,无法通过简单的帧差法得到运动目标,造成了目标检测的困难。
针对此问题,学者们提出了许多方法。多假设检测(MHT)[6]是较早提出的一种有效的目标检测跟踪算法,它将所有候选目标点可能的关联情况都作为一种假设,随着新观测数据集的到来不断衍生,得到一棵假设树,同时根据制定规则不断对树进行修剪。为了防止虚警等因素导致误判,每一次修剪都需根据后面得到的观测数据进行判断。MHT对于性噪比很低的图像也有较好的检测效果,然而这是以巨大的计算量为代价的,实时性较差。事实上,MHT属于检测前跟踪(Track-Before-Detect,TBD)算法,而根据星图本身的特征,跟踪前检测(Detect-Before-Track,DBT)算法要更加适合[7]。
文献[8]提出了一种序列星图中目标运动轨迹的提取算法,利用序列图像中最亮的一组星点的质心进行图像匹配,滤除背景恒星,提取目标运动轨迹。文献[9]提出了一种基于星图识别的空间目标检测算法,利用三角形算法进行探测图像序列的配准,然后在配准后的图像序列中检测出空间目标。文献[10]提出了一种基于改进的三角形匹配的星图配准方法,改进了传统的三角形匹配算法,通过多帧轨迹关联检测出目标的运动轨迹。文献[11]利用三角形算法对星图序列中的恒星进行匹配,将恒星与潜在目标分类,之后通过3帧最近邻关联法粗检测目标,并利用多帧前后向搜索法滤除假目标。文献[12]利用恒星三角形定位帧差得到只包含目标和噪声的图像序列,再使用改进的DPA算法检测空间运动小目标。文献[13]提出了一种基于迭代最优化分类思想的弱小目标检测新方法,利用迭代最优化距离分类方法去除恒星背景,依据目标轨迹连续性进行目标轨迹关联,检测出弱小目标。
上述文献的核心思想是利用恒星位置的相对不变性配准图像,滤除背景恒星,因而存在计算量大、实时性较差的问题;文献[14]将空间目标检测分成3种情形,利用从图像序列中提取出的特征针对每个像素特征构造稳定性函数,据此检测出目标,虽然没有图像配准,但是仅考虑了一个目标的情形;文献[15]基于FPGA和DSP提出了一种空间小目标的实时检测算法,但是并未考虑平台的不稳定性。此外,以上文献中用于验证算法的星图序列,文献[8,11-14]使用了地基光电望远镜观测的星图序列,文献[9-10,15]使用的是仿真生成的星图序列,没考虑天基实测图像特点。
本文针对卫星拍摄的以深空为背景的视频图像中空间运动目标的检测问题进行了研究,提出了一种基于运动信息的目标检测算法,并利用某型卫星在轨拍摄的视频图像验证了算法的有效性。
1 卫星拍摄空间运动目标视频图像特性
卫星拍摄的以深空为背景的视频图像包括星空背景、大量的恒星、运动目标以及由成像设备和宇宙射线引入的噪声组成。其数学模型可以描述为[15]:
f(x,y,t)=fB(x,y,t)+fs(x,y,t)+fT(x,y,t)+n(x,y,t)。(1)式(1)中:fB(x,y,t)为深空背景灰度值;fs(x,y,t)为恒星背景灰度值;fT(x,y,t)为目标灰度值;n(x,y,t)为噪声灰度值;(x,y)表示图像中的像素坐标;t表示视频图像的帧数。
视频图像中,恒星和空间运动目标距离相机都较远,所成像仅占据有限个像素,为点状分布,难以利用形态特征和光度特征分辨出目标与背景恒星,如图1所示,可以看出单帧图像中很难区分恒星和目标。
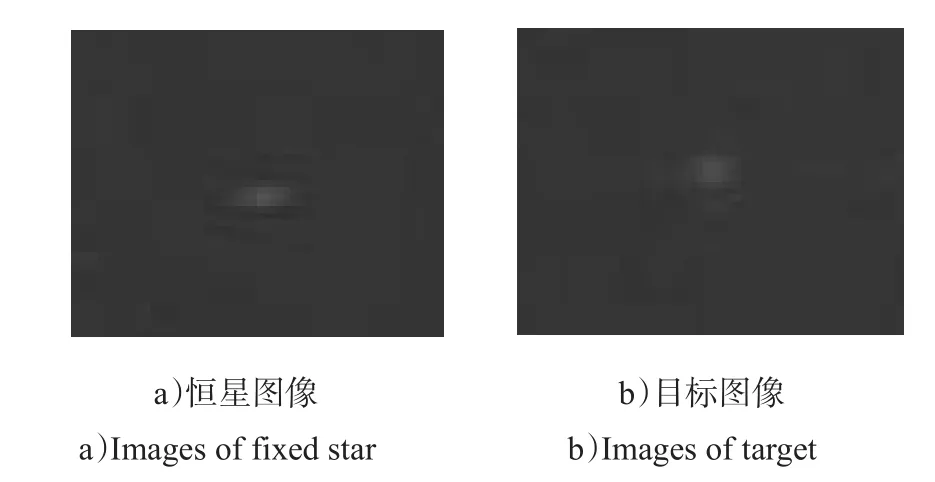
图1 恒星和目标图像Fig.1 Imagesof fixed starand target
2 基于运动信息的目标检测
2.1图像降噪
视频图像中的噪声主要包括空间辐射噪声、星空背景噪声和CCD暗电流噪声等,可采用3×3均值滤波来降低噪声,滤波模板为:
2.2单帧图像分割
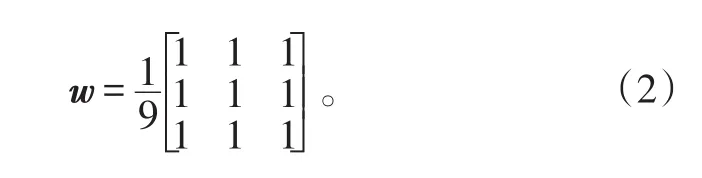
为了区分恒星和目标,须将每帧图像中的背景去除,然而杂散光却使得图像背景强弱分布不均匀。图2 a)是视频图像的的某一帧图像,图2 b)是其灰度直方图。由灰度直方图的单峰形态可知,无法用传统星图分割所采用的全局阈值法[8,10-12,15]来分割图像。
图2 单帧视频图像及其灰度直方图Fig.2 Gray levelhistogram of single frame image
无论是恒星还是目标,其灰度值都要大于其邻域中的像素点,考虑采用基于局部统计的可变阈值来分割图像。对图像中每一点(x,y)的邻域计算标准差σxy和均值mxy,它们是局部对比度和平均灰度的描述子,之后得到基于局部均值和标准差的阈值:

式中,a和b是大于0的常数。b表示平均灰度对阈值的贡献,一般取为1+ε,而a表示局部对比度对阈值的贡献,是根据目标特性主要调整的参数。对于空间运动目标,灰度随着姿态变化不断变化,时强时弱,a若较大,则会在很多时刻丢失目标,因而在1的小邻域内取值。
分割图像算法如下:

式(4)中:f(x,y)是原图像在(x,y)处的灰度值;g(x,y)
是分割处理后的图像在(x,y)处的灰度值。
2.3像点坐标提取
在理想光学系统中,点目标在CCD焦平面上成像要占据一个像素,但在实际成像条件下,受圆孔衍射的影响,导致目标在焦平面的成像由点成像扩散为多像元[3]。这时,目标在焦平面的坐标由其灰度中心所在位置确定,这里采用简单有效的灰度重心法计算像点坐标,定位精度可达0.1~0.3个像素[16]。
对图像二值化分割,识别出目标区域S,其灰度中心坐标计算公式为:
式(5)中:f(x,y)是原图像在(x,y)处的灰度值;(xS,yS)即为区域S的灰度中心坐标。
2.4基于运动信息的目标检测
空间运动目标的姿态变化使其亮度不断变化,时强时弱,亮度较低时,单帧画面中甚至会丢失目标,可见,孤立地对每幅图像进行处理,无法区分恒星和目标,因为这样没有利用图像序列中目标的连续一致性,浪费了大量信息。因此,须要利用空间目标与背景恒星成像运动特征上的差异将其分辨出来。
测量过程中,背景恒星在惯性空间中可认为是静止的,其成像运动仅与卫星视轴变化相关,这就是其与空间目标成像运动特征最重要的区别。
有了卫星视轴变化的先验信息,即可确定恒星的运动状态。当卫星视轴不变,即卫星处于凝视观测状态时,恒星可以认为是静止的,而目标依旧在运动。基于此提出下述凝视观测时的目标检测算法:
1)第 1帧图像得到 n1个点 (x1,y1),(x2,y2),…, (xn1,yn1),作为n1个点类的坐标;
2)第 2帧图像得到 n2个点 (x1,y1),(x2,y2),…, (xn2,yn2),与已有的点类坐标比较,当距离小于阈值时,认为是一类,并由新的坐标代替旧的坐标作为点类的坐标,如果与每个点类坐标的距离都大于阈值,则作为新的点类。如此对获得的每一帧进行处理。这里的阈值需大于目标在一帧时间的运动距离。
3)当处理完10帧时,即开始判断每个点类是否为目标,计算横坐标与纵坐标的标准差之和与阈值比较,小于认为是恒星背景或噪点,大于则认为是空间运动目标。
这里的阈值主要剔除卫星平台的不稳定性带来的图像晃动,一般可设为1。
3 实验结果
为了验证文中算法,对某卫星在轨拍摄的一段视频图像进行实验,图像大小为960×576,灰度级为8bit,对连续20帧图像进行处理。
式(3)中取a=1,b=1.1,分割时所基于的邻域使用7×7邻域,如对第20帧图像分割后可得到10个目标区域,见图3。
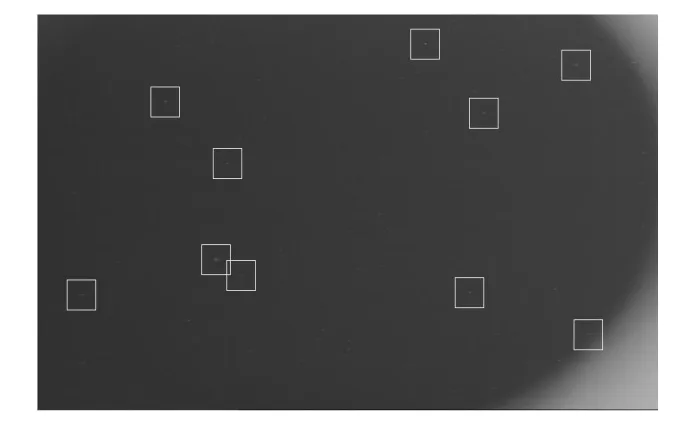
图3 第20帧图像分割后得到的结果Fig.3 Resultof segmenting the 20th frame image
目标检测算法第2)步中的阈值取为5,第3)步中的阈值取为1。使用文中算法处理后,检测出一个运动目标,如图4所示。可见因目标姿态的变化,其亮度也发生了较大的变化,通过运动信息较好地检测出了目标。整个检测过程耗时1.88 s,平均一帧的处理时间小于100ms,具有较好的实时性。
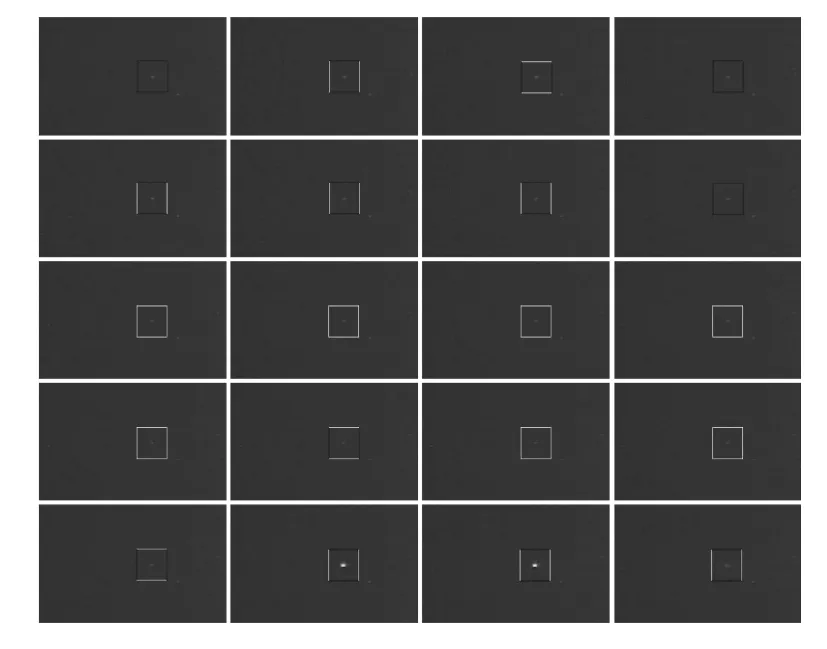
图4 某颗卫星视频图像检测结果Fig.4 Detection resultsof satellite video images
4 结论
本文针对卫星拍摄的以星空为背景的视频图像,提出了一种基于运动信息的弱小目标检测算法。针对视频图像的特点使用了局部可变阈值分割图像,基于卫星凝视观察时恒星与目标运动特征的不同检测出目标。通过某型卫星的实拍视频图像验证了算法的有效性和实时性。
[1]杨秀彬,林星辰.低轨凝视卫星动态跟踪对成像的影响分析[J].红外与激光工程,2014,42(S1):203-208.
YANG XIUBIN,LIN XINGCHEN.Analysis of influence of LEO staring satellite dynamic tracking on imaging[J]. Infrared and Laser Engineering,2014,42(S1):203-208. (in Chinese)
[2]云燕.业界动态[J].卫星应用,2014(8):3-4.
YUN YAN.Industry news[J].Satellite Application,2014 (8):3-4(.in Chinese)
[3]STECKLING M,RENNER U,ROSER H.DLR-TUBSAT,qualification of high precision attitude control in orbit[J].Acta Astronautica,1996,39(9):951-960.
[4]TRIHARJANTO R,HASBIW,W IDIPAM INTO A.Lapan-Tubsat:m icro-satellite platform for surveillance&remote sensing[C]//Proceedings of the 4S Symposium:Small Satellites,Systems and Services(ESA SP-571). 2004:id.35.1.
[5]中新社.中国“一箭双星”成功将“遥感卫星二十一号”与“天拓二号视频微卫星”发射升空[J].河北遥感,2014 (3):12.
CNS.China has successfully launched a rocket carrying 21stremote sensing satellite and TT2 video m icrosatellite [J].HebeiRemote Sensing,2014(3):12.(in Chinese)
[6]BLOSTEIN SD,HUANG T S.Detection of smallmoving objects in image sequences usingmultistage hypothesis testing[C]//IEEE Proceedings on ICASSP.New York:IEEE,1988:1068-1071.
[7]TAO HUANG,YAOHENG XIONG,ZHULIAN LI,etal. Space target tracking by variance detection[J].Journal of Computers,2014,9(9):2107-2115.
[8]张春华,陈标,周晓东.运动背景星空图像中小目标的运动轨迹提取算法[J].光学精密工程,2008,16(3):524-530.
ZHANG CHUNHUA,CHEN BIAO,ZHOU XIAODONG.Small target trace acquisition algorithm for sequence star images w ith moving background[J].Optics and Precision Engineering,2008,16(3):524-530.(in Chinese)
[9]程军,张伟,丛明煜,等.基于星图识别的空间目标检测算法研究[J].光学技术,2010,36(3):439-444.
CHENG JUN,ZHANGWEI,CONGM INGYU,etal.Research of detecting algorithm for space object based on starmap recognition[J].Optical Technique,2010,36(3):439-444.(in Chinese)
[10]韩艳丽,刘峰.基于三角形匹配的空间小目标检测算法[J].红外与激光工程,2014(9):3134-3140.
HAN YANLI,LIU FENG.Small targets detection algorithm based on trianglematch space[J].Infrared and Laser Engineering,2014(9):3134-3140.(in Chinese)
[11]张健,奚晓梁,周晓东.基于运动信息的星图中空间目标检测算法[J].系统工程与电子技术,2014(5):838-845.
ZHANG JIAN,XI XIAOLIANG,ZHOU XIAODONG. Space target detection in star image based onmotion information[J].Systems Engineering and Electronics,2014 (5):838-845.(in Chinese)
[12]张玉叶,王春歆.基于改进DPA的空间小目标检测算法[J].电子学报,2010,38(3):556-560.
ZHANG YUYE,WANG CHUNXIN.Space small targets detection based on improved DPA[J].Acta Electronica Sinica,2010,38(3):556-560.(in Chinese)
[13]姚睿,张艳宁,杨涛,等.基于迭代距离分类与轨迹关联检测空间弱小目标[J].光学精密工程,2012(1):179-189.
YAO RUI,ZHANGYANNING,YANG TAO,etal.Detection of small space targetbased on iterative distance classification and trajectory association[J].Optics and Precision Engineering,2012(1):179-189.(in Chinese)
[14]XU YONGHUI,ZHANG JIHUI.Real-time detection algorithm for small space targets based onmax-median filter[J].Journal of Information&Computational Science,2014,11(4):1047-1055.
[15]王兆魁,张育林.一种CCD星图星点快速定位算法[J].空间科学学报,2006,26(3):209-214.
WANG ZHAOKUI,ZHANG YULIN.A lgorithm for CCD star image rapid locating[J].Chinese Journal of Space Science,2006,26(3):209-214.(in Chinese)
[16]于起峰,尚洋.摄像测量学原理与应用研究[M].北京:科学出版社,2009:101.
YU QIFENG,SHANG YANG.Videometrics:principles and researches[M].Beijing:Science Press,2009:101.(in Chinese)
Video Image Space TargetDetection Based on Motion Information
ZHANGXueyang,XIANG Junhua
(CollegeofAerospace Scienceand Technology,NUDT,Changsha 410073,China)
A space target detection algorithm in video with star image background from video satellite was researched, which was based onmotion information.Firstly,average filterwas used to decrease noise.Then a single frame image was segmented using variable thresholding based on local image properties.When video satellitewas staring interested area, stars in FOV could thoughtstatic and the targetwasmoving.So space targetcould detected bymotion information.Experi⁃mental resultsaboutvideo from satelllite demonstrated the effectivenessof the algorithm.
space target detection;small targetdetection;targetmotion information;local variable thresholding;video im⁃age
TP391.41
A
1673-1522(2016)02-0113-04
10.7682/j.issn.1673-1522.2016.02.003
2015-08-30;
2016-01-26
国防预研基金资助项目(51320010201)
张学阳(1988-),男,博士生。
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
建材发展导向(2021年19期)2021-12-06
小哥白尼(神奇星球)(2021年11期)2021-03-08
天津医科大学学报(2021年1期)2021-01-26
小聪仔(科普版)(2020年12期)2021-01-18
临床骨科杂志(2020年1期)2020-12-12
中国信息技术教育(2020年2期)2020-02-02
百科探秘·航空航天(2018年12期)2018-12-29
奥秘(2018年10期)2018-10-25