
空间相机柔性减振支撑结构的优化设计
2016-08-23 06:31杨洪波谭陆洋孙战磊
光学精密工程 2016年7期
李 林,王 栋,杨洪波,谭陆洋,孙战磊
(1.中国科学院 长春光学精密机械与物理研究所,吉林 长春 130033;2.中国科学院大学,北京 100039;3.长光卫星技术有限公司,吉林 长春 130033)
空间相机柔性减振支撑结构的优化设计
李林1,2,王栋1,3*,杨洪波1,谭陆洋1,2,孙战磊1,2
(1.中国科学院 长春光学精密机械与物理研究所,吉林 长春 130033;2.中国科学院大学,北京 100039;3.长光卫星技术有限公司,吉林 长春 130033)
根据高分辨率空间相机性能要求,设计了一种倒圆角直梁复合组成的双脚架柔性减振支撑结构。首先,根据某卫星结构要求初步设计了相机底部支撑结构,建立了以随机响应为目标的优化设计模型。利用尺寸优化设计了双脚架结构支腿的柔性环节,得到柔性环节最小厚度为2.5 mm。然后,对相机底部支撑结构进行了工程分析。分析结果表明,设计的支撑结构组件重量1.26 kg,基频达到1 624 Hz。最后,对空间相机底部支撑结构组件进行了随机振动试验,试验结果显示:与相机结构连接处的最大响应RMS值为21.4 grms,随机响应最大相对放大率为0.93,满足空间相机支撑结构的减振要求。得到的结果验证了设计和分析的可靠性,对同类卫星相机底部支撑结构的设计具有一定的指导意义。
空间相机;支撑结构;柔性减振;随机振动;加速度响应;优化设计
1 引 言
空间相机是一种高精密的光学仪器,底部支撑结构作为连接空间相机与卫星平台的关键组件,是满足空间相机成像质量的重要保证[1]。卫星在地面运输阶段,火箭发射阶段以及卫星在轨相机成像阶段,空间相机底部支撑结构依靠自身的结构功能特点,一方面直接对空间相机提供定位、支撑、抵御外部变形的作用;另一方面,可避免外部力矩通过卫星平台耦合到相机上,降低卫星平台精度,使相机可以适应苛刻的力学环境,保证了相机在苛刻力学环境下的结构稳定性。
国内外有许多研究机构对柔性铰链的性能进行了研究。薛闯和颜昌翔[2]利用双脚架柔性机械接口,一定程度上抑制了卫星平台结构变形对相机主结构的扭曲作用。郭权锋[3]设计双曲线型柔性槽的支撑结构有效地释放了空间坐标系3个方向上的变形和应力。周子云、高云国和邵帅等[4]采用柔性铰链设计的快速反射镜结构获得了较好的发射光束控制精度。J.M.PAROS和L.WEISBORD[5]在1965年推导出的柔性铰链设计的计算公式一直沿用至今,给柔性铰链的设计计算带来极大方便。
上述支撑结构有效地解决了支撑结构设计柔性支撑中静力变形问题,但并未考虑支撑结构所承受的动载荷对相机结构的影响。本文针对某高分辨率空间相机对其底部支撑结构的性能要求,设计了倒圆角直梁复合组成的双脚架柔性减振支撑结构,在满足柔性支撑的基础上,对支撑结构进行了动力学设计分析,并通过有限元方法和振动试验验证了所设计的空间相机底部支撑结构的性能,满足相机支撑结构的减振要求,弥补了对空间相机底部支撑结构研究工作中的不足。
2 空间相机底部支撑结构设计
底部支撑结构作为空间相机力学条件承载点,需要在相机与卫星平台连接之前完成一系列环境试验,因此,设计相机底部支撑结构时需要充分考虑动静态力学性能要求[6]。根据某卫星结构要求,初步设计了空间相机底部支撑结构。
2.1相机底部支撑结构拓扑优化
采用AltairOptiStruct中基于变密度法(SIMP方法[7-8])的拓扑优化模块对支撑结构模型进行优化设计。根据相机对支撑结构性能的要求,需要使支撑结构刚度最大化,刚度最大化通常等效为柔度最小问题,柔度则用应变能定义[9]。拓扑优化模型以结构应变能最小为目标,体积比作为约束,以材料分布密度为变量,拓扑优化模型为:
F=KU
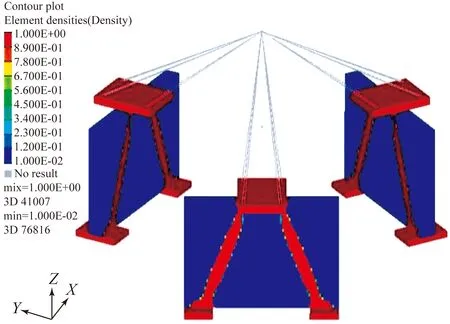
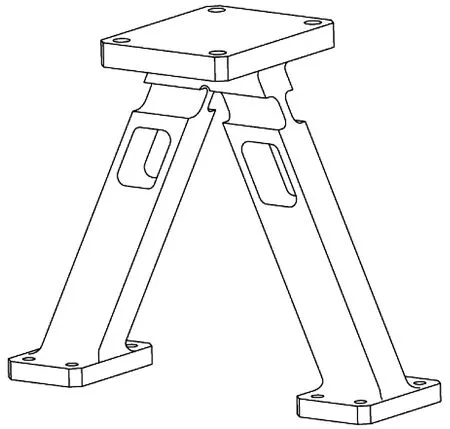
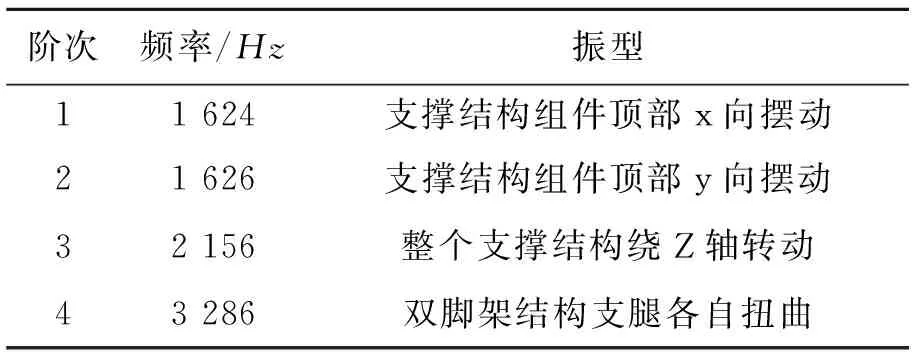
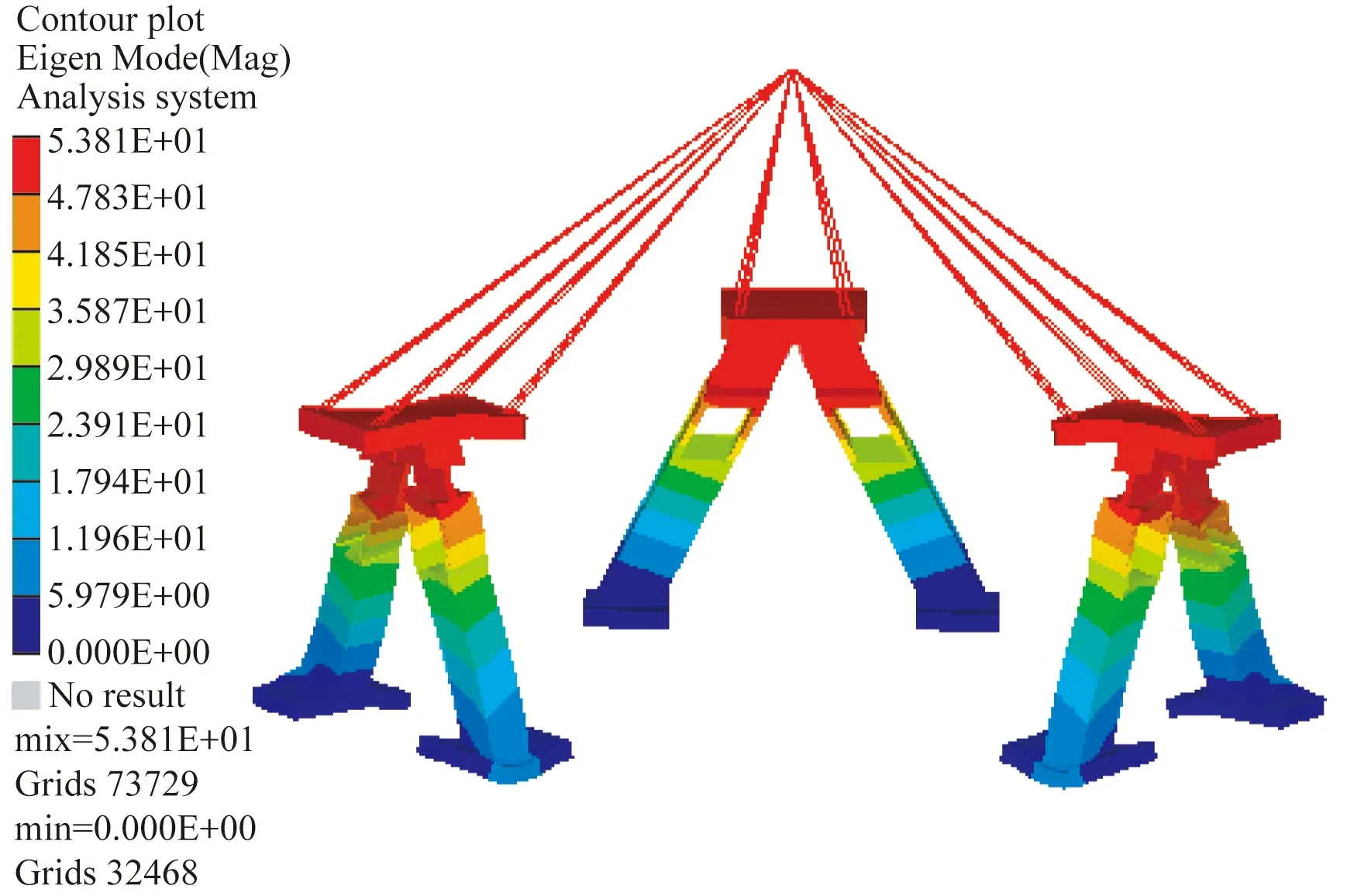
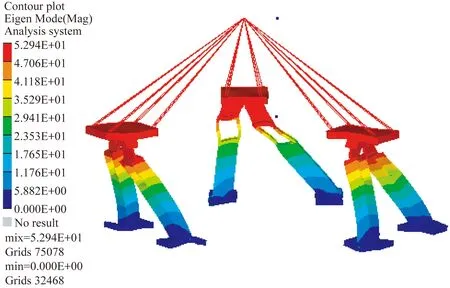
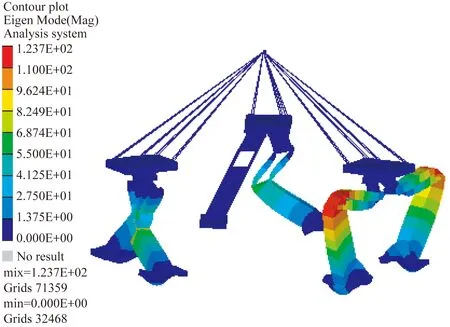
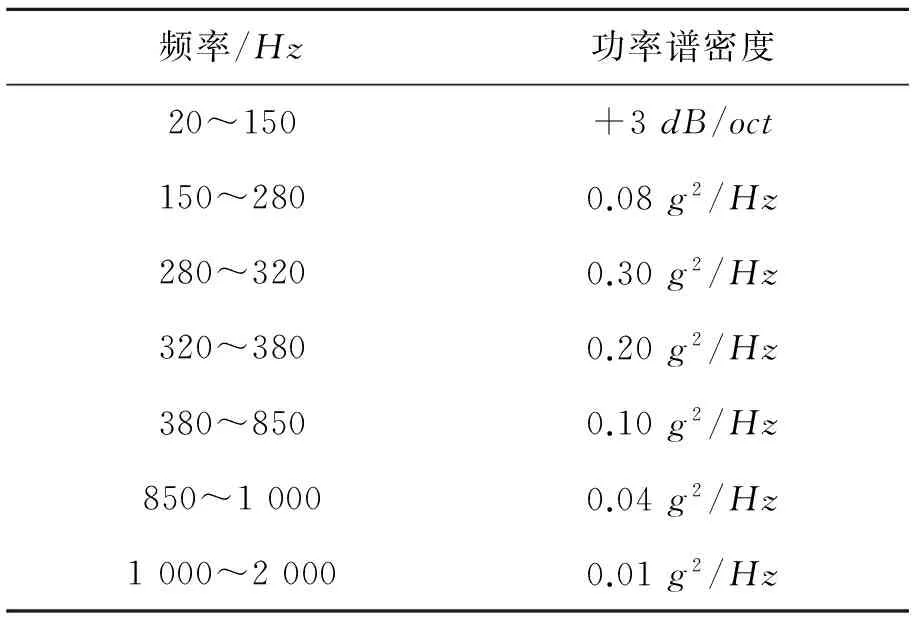
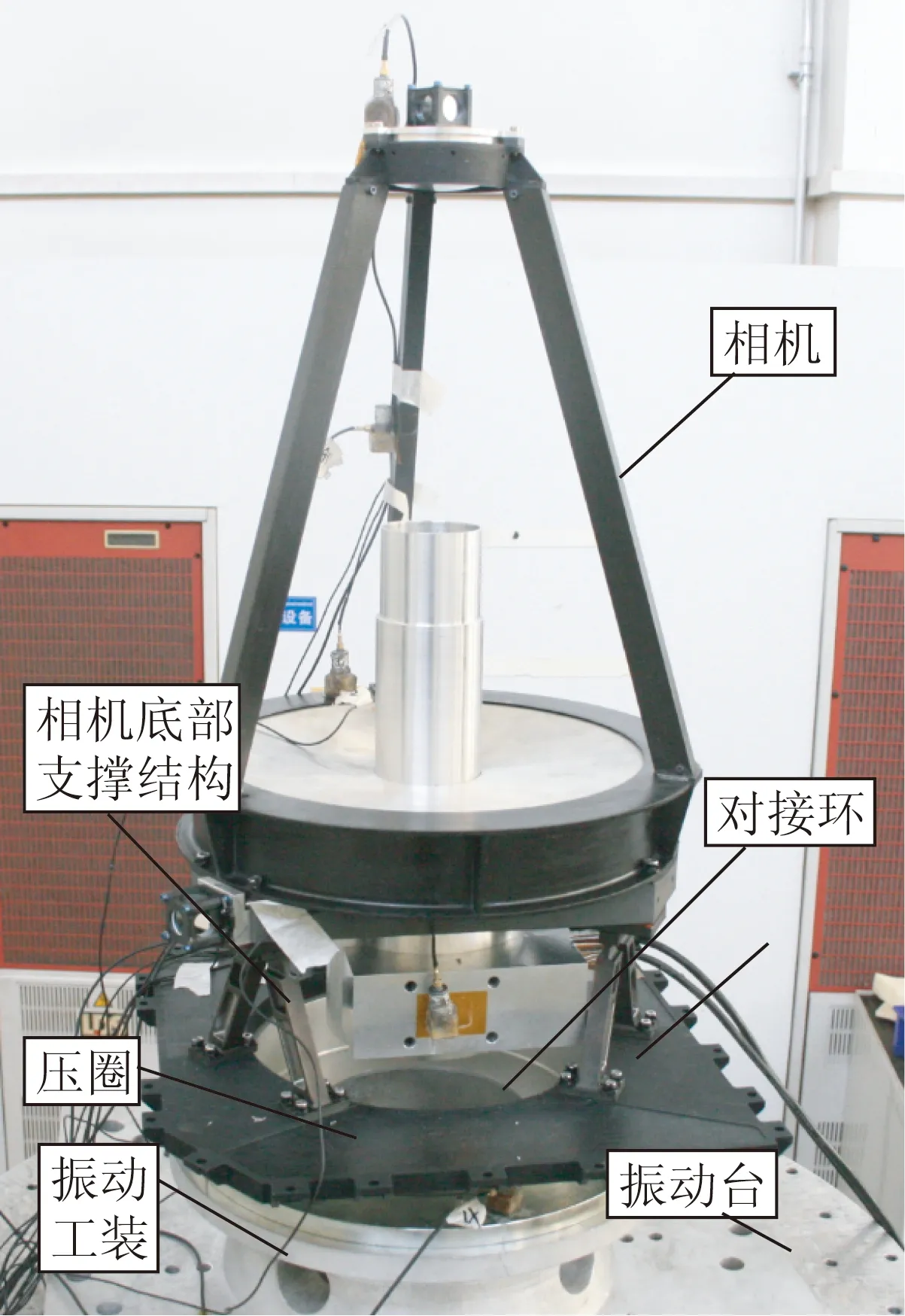
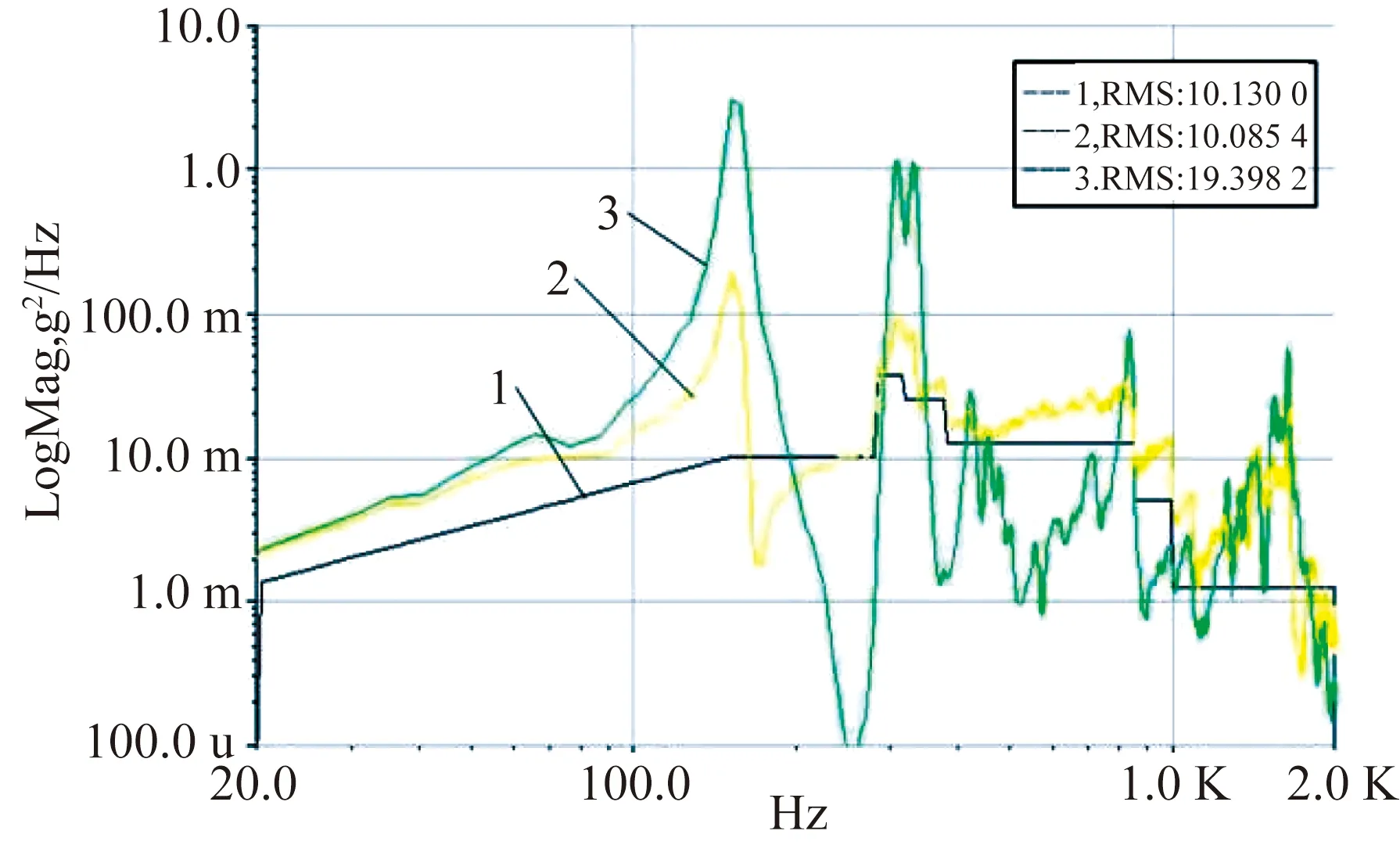
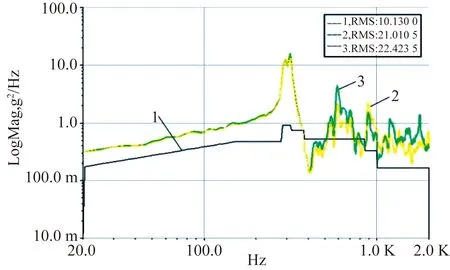
0 式中:xi为单元的相对密度;N为结构离散单元总数;C为结构的总体柔度;p为惩罚因子;ki为优化后单元刚度矩阵;f为优化体积比;K为优化前结构总体刚度矩阵,U和F分别是位移列阵、力矢量;k0为初始单元刚度矩阵;ui为单元位移列矢量;xmin、xmax分别是单元相对密度的最小极限值和最大极限值;vi为优化后单元体积;V0为设计域的初始体积;V为优化后的结构体积。 根据某卫星结构设计要求,设计了空间相机底部支撑结构,建立空间相机底部支撑结构的有限元模型。采用OptiStruct模块对支撑结构模型材料分布进行拓扑优化,其中相机用集中质量点代替,有限元模型如图1所示。 图1 初步设计的支撑结构有限元约束模型 Fig.1Preliminarydesignofsupportstructurefiniteelementmodelofconstraint 经过14步迭代优化之后得到类似双脚架的结构,其材料分布模型如图2所示。每个双脚架由2根成一定角度的支腿组成。双脚架结构可实现类似V型块的2个自由度约束。3个双脚架以圆周形式均布在支撑目标底面,从而实现支撑目标的6自由度约束。用变密度法得到的拓扑优化结构式密度等值分布图,其中密度为中间值所对应的区域为假想的材料,在实际工程中是没法实现,因此在得到最优拓扑图形后需要对这些区域进行人为处理以适应实际工程需要。 图2 支撑结构材料分布拓扑优化结果 Fig.2Topologyoptimizationresultsofsupportstructurematerialdistributed 2.2双脚架支撑结构柔性减振设计 柔性铰链结构具有无间隙、无机械摩擦、高灵敏度等特点而被广泛应用[10-14]。卫星结构中,相机主体通过3个双脚架组件固定到卫星底板上,为了避免外力耦合到相机结构上降低相机成像质量。需对双脚架结构支腿进行柔性减振设计。以目标点随机响应相对放大率为衡量减振效果依据。 2.2.1随机响应理论 绝对坐标系下,由基础支撑运动引起的多自由度系统运动方程为: (2) (3) (4) 根据微分关系: (5) (6) 将式(4)、(5)带入(2)、(3)得强迫振动稳态响应方程: (7) 其中: P=PR+jPI, (8) (9) (10) 利用虚拟激励法可求得加速度响应自谱密度在频点w处的值为: (11) 则加速度响应均方值为: (12) 2.2.2随机响应优化模型 建立以相机主支撑结构基频和体积分数为约束,相机安装点的加速度均方响应RMS值最小为设计目标的尺寸优化模型。设计变量为: T′=(t1,t2,…,te,…,tn)T, (13) 式中:te表示柔性环节的厚度。 某卫星要求相机主支撑结构基频f1大于相机基频,设定相机主支撑结构基频不小于200Hz。体积约束可以反映质量约束,体积分数α一般取值20%~60%,取α为40%作为优化的约束条件。 相机主支撑结构尺寸优化目标函数为相机安装点随机振动加速度响应均方根值RMS,用式(14)表示。 相机支撑结构尺寸优化的数学模型为: find:T′=(t1,t2,…,te,…tn)T f1≥200 0≤ti≤te≤1, (14) 式中:te表示柔性环节厚度;α为体积分数,表示柔性环节优化后的体积与优化前的体积比;f1表示支架结构基频。 2.2.3相机主支撑结构随机响应优化结果 采用OptiStruct对柔性环节详细设计尺寸进行离散变量优化,为了兼顾加工工艺性,设定优化步长为0.5mm。优化过程中,结构阻尼系数暂采用整星结构阻尼系数0.02。在保证结构刚度需求的基础上,得到柔性环节最小厚度为2.5mm,倒圆角半径2mm,以随机响应为目标的相机支撑结构优化后的模型如图4所示。 图4倒圆角直梁复合组成的双脚架柔性减振支撑结构模型 Fig.4Filletbipodstraightbeamcompositecomposition 3.1底部支撑结构动力学频率特性 在相机底部支撑结构设计中主要的考核指标为结构的低阶模态。模态分析用于确定设计中结构的振动特性,即系统结构的固有频率和振型,是考察动态刚度的重要指标,结构低阶模态也是修改底部支撑结构的重要依据。考察其一阶固有模态是否与卫星相机载荷一阶固有模态重叠或相近,当底部支撑组件的低阶模态与卫星载荷重叠或相近时,必须对结构进行改进。 图5 支撑结构组件有限元约束模型 按照某小卫星结构的实际安装状态对相机底部主支撑结构组件进行约束,主支撑结构材料选用密度小、强度高、弹性模量为10 900kg/mm2的金属材料TC4,倒圆角直梁复合组成的双脚架支撑柔性减振结构组件有限元约束模型如图5所示。表1列出了相机主支撑结构的前4阶固有频率和振型,支撑结构前4阶阵型如图6所示,结果表明,支撑结构的基频远高于相机基频110Hz,满足设计要求。 表1相机底部支撑结构前4阶模态分析结果 Tab.1Resultsofanalysisstructureofthefirst4ordermodalcamerasupportatbottom 阶次频率/Hz振型11624支撑结构组件顶部x向摆动21626支撑结构组件顶部y向摆动32156整个支撑结构绕Z轴转动43286双脚架结构支腿各自扭曲 (a)一阶振型 (a)1storder (b) 二阶振型 (c) 三阶振型 (d) 四阶振型 3.2支撑结构随机振动响应分析 在设计时需要对底部支撑结构在随机振动环境中的可靠性进行考核。为此,在设计过程中本文用MSC.Patran&Software公司的大型结构有限元软件Nastran对相机底部支撑结构组件在随机振动激励下的动强度和加速度响应进行了分析和计算。 根据目前国内航天领域计算随机振动加速度响应最常用的全频段法[17],即将加速度响应谱密度函数在20~2 000Hz的全频段进行积分,从而得出其均方根值。某卫星运载提供的随机振动强迫加速度功率谱条件如表2所示,其RMS值为10.16grms。 表2激励加速度功率谱(PSD) 利用MSC.Patran&Nastran对空间相机底部支撑结构组件分别对x、y、z 3个方向进行随机振动进行分析,表3列出了相机安装采样点随机响应结果。 表3 随机振动响应分析结果 对某卫星相机模型样机进行振动试验,主要包括相机、相机底部支撑结构、对接环、卫星底板以及某卫星工装。振动试验目的是为了验证结构的稳定性,获取各部件的响应大小,暴露材料和结构等方面的缺陷。试验各部件安装关系如图7所示。 图7 试验各部件安装位置关系 Fig.7Positionalrelationshipbetweeneachtestcomponentinstallation 按照试验要求,在室温条件下分别对x、y、z 3个方向进行随机振动试验。 试验得到相机底部支撑结构随机振动试验结果如图8所示,曲线1为试验系统输入激励加速度功率谱,曲线2为相机底部支撑结构底端采集结果,曲线3为相机底部支撑结构顶端响应采集结果。 (a)x向随机振动响应曲线 (b)y向随机振动响应曲线 (c)z向随机振动响应曲线 表3所示为x、y、z向系统输入的RMS值、相机底部支撑结构底端和相机底部支撑结构顶端的RMS值。曲线1的RMS值验证了系统输入的正确性,据表4可分别得出相机底部支撑结构x、y、z 3个方向的随机振动响应相对放大率分别为0.93、0.24、0.07,在卫星总体要求相对放大率不大于1的要求内,由此验证了空间相机主支撑结构所采用设计方法的合理性和可靠性。 表4 x、y、z向RMS值 本文根据某卫星设计中对空间相机性能要求,设计了一种倒圆角直梁复合组成的双脚架柔性减振支撑结构,建立了以随机响应RMS值为目标的优化设计模型,利用CAE分析软件对支撑结构进行了有限元分析。最后对倒圆角直梁复合组成的双脚架柔性减振支撑结构进行了试验,结果表明支撑结构的随机响应最大相对放大率为0.93,满足卫星总体相对放大率不大于1的要求,验证了设计和分析的准确性和合理性。所设计的相机柔性减振支撑结构可以为其它的空间相机支撑结构设计提供一种新的设计思路。 [1]刘强.超宽覆盖空间遥感器底部支撑结构研究[D].北京:中国科学院大学,2013. LIUQ. Research on the bottom support structure of the extra-wide coverage remote senor [D].Beijing:UniversityofChineseAcademyofSciences,2013.(inChinese) [2]薛闯,颜昌翔.空间相机主支撑结构设计与分析[J].科学技术与工程,2011,11(35):8894-8897. XUECH,YANCHX.Primarystructuraldesignandmechanicalanalysisofspacecamera[J]. Science Technology and Engineering,2011,11(35):8894-8897.(inChinese) [3]郭权锋.同轴三反空间相机结构稳定性研究[D].北京:中国科学院研究生院,2012. GUOQF. Research on Structure Stability of Three-Mirror Casse grain Space Camera [D].Beijing:GraduateUniversityofChineseAcademyofSciences, 2012.(inChinese) [4]周子云,高云国,邵帅,等.采用柔性铰链的快速反射镜设计[J].光学 精密工程,2014,22(6):1547-1554.ZHOUZY,GAOYG,SHAOSH, et al..Designoffaststeeringmirrorusingflexiblehinge[J]. Opt.Precision Eng.,2014,22(6): 1547-1554.(inChinese) [5]PAROSJM,WEISBOROL.Howtodesignflexurehinges[J]. Machine Design, 1965, 37(27):151-157. [6]柯受权.卫星环境工程和模拟试验(下)[M]. 北京:中国宇航出版社,2005:23-31.KESHQ.Satellite environment engineering and simulation experiment(2) [M].Beijing:ChinaAstronauticPublishingHouse,2005:23-31.(inChinese) [7]左孔天.连续体结构拓扑优化原理与应用研究[D].武汉:华中科技大学,2004. ZUOKT. Research of theory and application about topology optimization of continuum structure [D].Wuhan:HuaZhongUniversityofScienceandTechnology, 2004.(inChinese) [8]郭中泽,张卫红,陈欲泽.结构拓扑优化综述[J].机械设计,2007,24(8):1-4. GUOZHZ,ZHANGWH,CHENYZ.Reviewoftopologyoptimizationdesign[J]. Journal of Machine Design, 2007, 24(8):1-4.(inChinese) [9]洪清泉,赵康,张攀,等.OptiStruct&HyperStudy·理论基础与工程应用[M].北京:机械工业出版社,2012:25-30. HONGQQ,ZHAOK,ZHANGP, et al..Opti Struct & HyperStudy ·The theoretical basis and engineering application [M].Beijing:ChinaMachinePress. 2012:25-30.(inChinese) [10]CHOIKB,LEEJJ,KIMMY. Cartwheel flexure-based compliant stage for large displacement driven by a stack-type piezoelectric element [C].InternationalConferenceonControl,AutomationandSystems,Seoul, 2007: 2754-2758. [11]HOWELLLL.Compliant Mechanisms[M].NewYork:Wiley, 2001. [12]鲁亚飞,范大鹏,范世珣,等.快速反射镜两轴柔性支承设计[J].光学 精密工程,2010,18(12):2574-2582. LUYF,FANDP,FANSHX,et al..Designoftwoaxiselasticsupportforfaststeeringmirror[J]. Opt.Precision Eng.,2010,18(12): 2574-2582.(inChinese) [13]辛宏伟,关英俊,李景林,等.大孔径长条反射镜支撑结构的设计[J].光学 精密工程,2011,19(7):1560-1568. XINHW,GUANYJ,LIJL,et al..Designofsupportforlargeaperturerectangularmirror[J].Opt.Precision Eng., 2011,19(7): 1560-1568.(inChinese) [14]HOWELLLL. Compliant Mechanisms[M].NewYork:Wiley, 2001. [15]OGUAMANAMDCD,HANSENJS,HEPPLERGR.Dynamics of a three-dimensional overhead crane system[J].JournalofSoundandVibration,2001,242(3): 411-426. [16]宋学峰,魏晓平.运筹学[M].南京:东南大学出版社,2003:10-20. SONGXF,WEIXP. Operations Research[M].Nanjing:SoutheastUniversityPress, 2003: 10-20.(inChinese) [17]杨宝宁.随机振动条件下设计载荷的确定[J].航天器工程,2006,15(3):89-96. YangBN.Engineeringmethodsfordeterminingquasi-staticlimitloadforstructuresunderrandomvibration[J]. Spacecraft Engineering, 2006, 15(3):89-96.(inChinese) 李林(1989-),男,湖北十堰人,博士研究生,2013年于北华大学获得学士学位,主要从事航天器结构设计与优化分析、微振动技术研究。E-mail:ucas_lilin@163.com 王栋(1982-),男,山东聊城人,博士,副研究员, 2008年于中国科学院长春光学精密机械与物理研究所获得博士学位,主要从事航天器热控制、小卫星总体结构设计等方面的研究。E-mail:simest@163.com 导师简介: 杨洪波(1963-),男,黑龙江人,研究员,博士生导师,主要从事光机热集成仿真技术的研究开发与应用、计算机辅助工程技术、光机电一体化技术研究。E-mail:yanghb@vip.163.com (版权所有未经许可不得转载) Optimization design of flexible and damping support structure of space camera LI Lin1,2, WAND Dong1*, YANG Hong-bo1, TAN Lu-yang1,2, SUN Zhan-lei1,2 (1.ChangchunInstituteofOptics,FineMechanicsandPhysics,ChineseAcademyofSciences,Changchun130033,China;2.UniversityofChineseAcademyofSciences,Beijing100049,China;3.ChangGuangSatelliteTechnologyLTD.,Changchun130033,China) *Correspondingauthor,E-mail:simest@163.com Accordingtotheperformancerequirementsofahigh-resolutionspacecameraforthebottomsupportstructure,aflexibleanddampingsupportstructurecompositedbyafilletfeetframeandastraightbeamwasdesigned.Firstly,thebottomsupportingstructureofthespacecamerawasdesignedbasedontherequestofasatellitestructure,andaoptimizeddesignmodelfortherandomresponsewasestablished.Theflexiblelinkforthelegoftwo-feetframestructurewasproposedwiththesizeoptimizationtechnology,andtheminimumthicknessoftheflexiblelinkis2.5mm.Then,thesupportstructureatthebottomofthecamerawasanalyzedinengineering.Theanalysisresultsshowthattheweightofsupportstructurecomponentsis1.26kg,andthefundamentalfrequencyis1 624Hz.Finally,thesupportstructurecomponentsofthespacecameraweretestedbytherandomvibrationtest,obtainedresultsshowthatthestructurejointmaximumresponseRMSvalueofthecamerais21.4grms,andtherandomresponsemaximumrelativemagnificationis0.93,satisfyingtherequirementofthesupportstructurevibrationofthespacecamera.Theseresultsverifythereliabilityofthedesignandanalysisinthispaperandprovideaguidingfordesignofcamerasupportstructuresofsimilarsatellites. spacecamera;supportstructure;flexibleanddamping;randomvibration;accelerationresponse;optimizationdesign 2015-11-12; 2015-12-13. 国家863高技术研究发展计划资助项目(No.2012AA121502) 1004-924X(2016)07-1677-08 V447.3 Adoi:10.3788/OPE.20162407.1677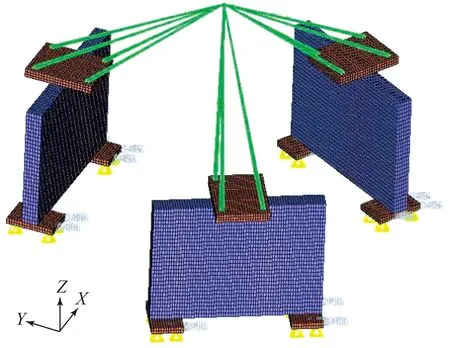











3 相机底部支撑结构分析计算



4 试验验证


5 结 论



猜你喜欢
机械工业标准化与质量(2022年9期)2022-09-30
石油沥青(2021年5期)2021-12-02
军民两用技术与产品(2021年10期)2021-11-25
文化创新比较研究(2020年7期)2021-01-13
少年文艺·开心阅读作文(2020年11期)2020-11-30
学校教育研究(2019年2期)2019-09-22
科学家(2019年3期)2019-08-18
Coco薇(2017年7期)2017-07-21
学生天地(2017年8期)2017-05-17
科学与财富(2016年28期)2016-10-14
