一种改进型多普勒周跳探测方法*
2016-08-10 10:40蔡成林吴国增曹振强于洪刚
航天控制 2016年5期
张 炘 蔡成林 吴国增 曹振强 于洪刚
桂林电子科技大学, 桂林541004
一种改进型多普勒周跳探测方法*
张 炘 蔡成林 吴国增 曹振强 于洪刚
桂林电子科技大学, 桂林541004

针对多普勒不易探测出小周跳的问题,提出一种改进方法。首先对原始多普勒观测值多项式拟合,外推出噪声较小多普勒值。然后用外推值进行周跳探测,最后前后历元的探测值相减得到周跳值。用BDS数据进行算法验证和分析。算法验证表明:改进后的方法能实时精确地探测出小周跳,弥补了传统多普勒周跳探测法的不足,并且具有简单、可靠等优点。 关键词 多普勒;周跳;探测与修复;多项式拟合;实时
目前,周跳探测与修复的方法主要有:多频点信号周跳探测[1-2]、伪距相位组合探测法[3]、小波探测周跳[4-5]和多项式拟合法[6]等[7],这些方法并未使用多普勒值。由于多普勒值的独立性,当载波相位发生周跳时不会影响多普勒观测值。利用多普勒观测值探测周跳可以对单频点载波相位进行周跳,不会出现当多频点同时发生周跳或特殊组合周跳时探测不了的问题,利用多普勒探测周跳是一种比较好的方法。
Canon于1992年提出利用多普勒值进行周跳的探测[8],2003年徐国昌博士提出利用多普勒积分探测周跳的思想。利用多普勒积分与载波相位变化量之间的关系进行周跳探测。现在关于研究提升多普勒探测周跳精度的方法是利用多普勒观测检测周跳与粗差[9],基于星历计算的多普勒积分探测周跳[10],多普勒与电离层残差法结合探测周跳等。而这些方法并未对原始多普勒观测值进行处理,传统多普勒探测周跳可以探测出1周以上的周跳,但由于噪声、粗差和接收机本身精度等原因对小周跳探测容易出现误判或探测不出。针对探测小周跳精度不高的问题,本文提出了对多普勒观测值进行处理,降低噪声干扰,然后探测周跳的方法。
1 基本原理
1.1 多普勒周跳探测的原理

(1)
式中,Δφ为[t,t0]时刻载波相位变化量,fd为多普勒观测量,ε为误差项。ΔN表示[t,t0]时间内载波相位发生的周跳值。
使用多普勒积分对载波相位进行周跳探测,利用梯形积分计算多普勒积分值
(2)
式中,fdt,fdt0表示[t,t0]时间内的多普勒观测量,Δt表示时间间隔。式(1)可以近似等于
ΔN=Δφ+(fdt+fdt0)Δt/2
(3)
式(3)表明多普勒周跳探测法是根据历元间的残差变化来判断是否有周跳发生。若在[t,t0]时间内,ΔN应该在一定范围内,δ为门限值。未发生周跳时,ΔN<δ;但若是超出了门限值ΔN>δ,则认为发生了周跳。传统多普勒周跳探测法可以探测出小周跳,但探测精度不准。
传统的多普勒周跳探测法探测周跳的精度不高,所以门限值无法通过取整确定,探测精度并不高。
1.2 改进型多普勒积周跳探测与修复原理
不同的接收机观测精度不同,一般接收机的多普勒精度为2cm/s[11]左右,B1频点的波长为19.03cm,采样间隔小于4s,传统多普勒周跳探测法可以探测1周的周跳,但在实际应用中还存在各种噪声、粗差以及接收机自身精度的影响,探测精度达不到最优。
本文提出了改进型多普勒周跳探测法,具体是:首先对多普勒观测值进行多项式拟合;多项式拟合法是将m个多普勒观测值fd拟合成1个n阶多项式 ,其数学模型为
fd′=a0+a1(ti-t0) +… +an(ti-t0)n
(其中,i=1,2,…,m;m>n+1)
(4)
式中,ti为拟合的历元观测值,t0为某一个时刻的初始历元。然后用最小二乘法求得式中的各个参数:a0,a1,a2,…,an,通过式(4)计算当前历元的拟合值。多普勒观测值关于对时间的导数fd′在四阶左右就接近于0,所以一般选择阶数n取2~4阶即可。然后通过拟合多项式外推出第m+1历元的多普勒观测值fm+1,通过上述方法可以得到一系列多项式拟合后的多普勒观测值。得到拟合后的多普勒观测值fd′,然后用拟合后的多普勒观测值fd′进行周跳探测,在第n-1历元得到探测值ΔNn-1,接着在下一历元探测得到探测值ΔNn,探测值进行历元间互差,互差后各个历元间探测值的变化量变缓,将前后两历元探测到的探测数值做差
ΔNx=ΔNn-ΔNn-1
(5)
式中,ΔNx为差后的周跳估计值。当ΔNx<δt(δt表示门限值),则第n历元不发生周跳;反之发生了周跳,探测出周跳估计值ΔNx,直接通过取整得到正确的周跳值。

δ为周跳判定的门限值,改进多普勒周跳法周跳探测的精度较高,所以探测出周跳值取整后可得到对应的门限值,门限为整数即可。
2 周跳探测试验与结果分析
为验证改进多普勒周跳探测法的可行性,采用2015年5月1日桂林某地观测的采样率为1s的数据。试验共接收了4000个历元BDS数据。用传统多普勒周跳探测法与改进型多普勒周跳探测法进行周跳探测,最后对2种方法的探测能力进行比较分析。
图1是无周跳时使用2种探测法的探测结果。可以看出,2种方法探测能力不同,改进方法探测值幅度值一般处于+0.05~-0.05周,传统方法探测值幅度大部分处于-0.5~+0.5周。传统方法探测值的幅度值整体大于改进方法探测的幅度值,传统方法的周跳最大幅度值位于第3554历元,探测值为0.858;改进方法探测的周跳最大幅度值位于第3366历元,探测值为0.087。无周跳情况下,传统多普勒周跳探测法探测出的探测值标准差ΔNold=0.194,改进型多普勒周跳探测法探测出的探测值标准差ΔNnew= 0.027。从图1知,若发生小周跳时,改进型多普勒周跳探测法的探测性能优于传统多普勒周跳探测法。
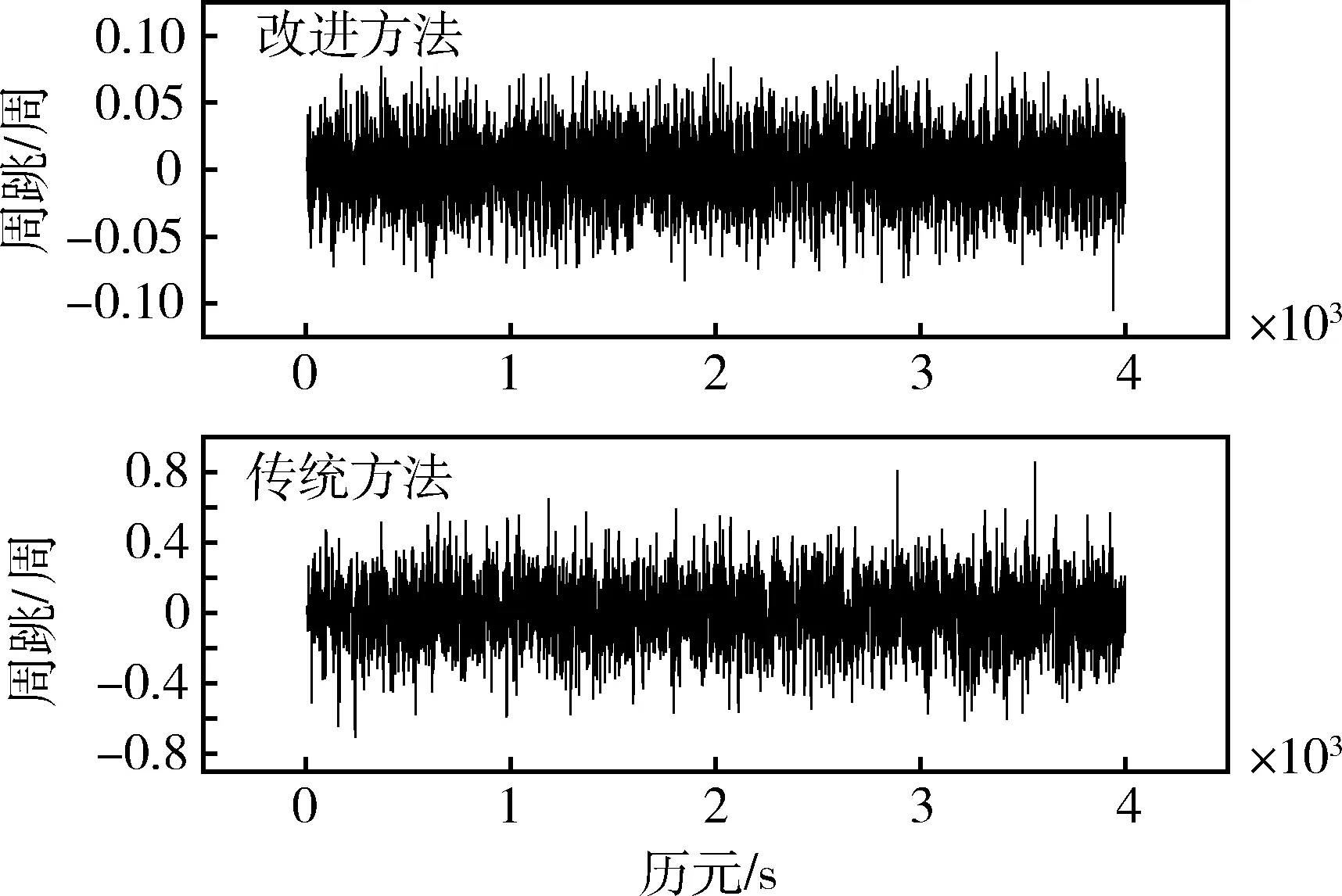
图1 无周跳时探测结果

传统方法探测的周跳波动淹没在其他较大的波形中 ,当设定门限值δ的绝对值为0.5时,经统计,传统方法探测周跳值有45个历元值大于0.5,所以会产生误判。改进方法探测值幅度较小,所以设定较小的门限值就可以探测到小周跳。
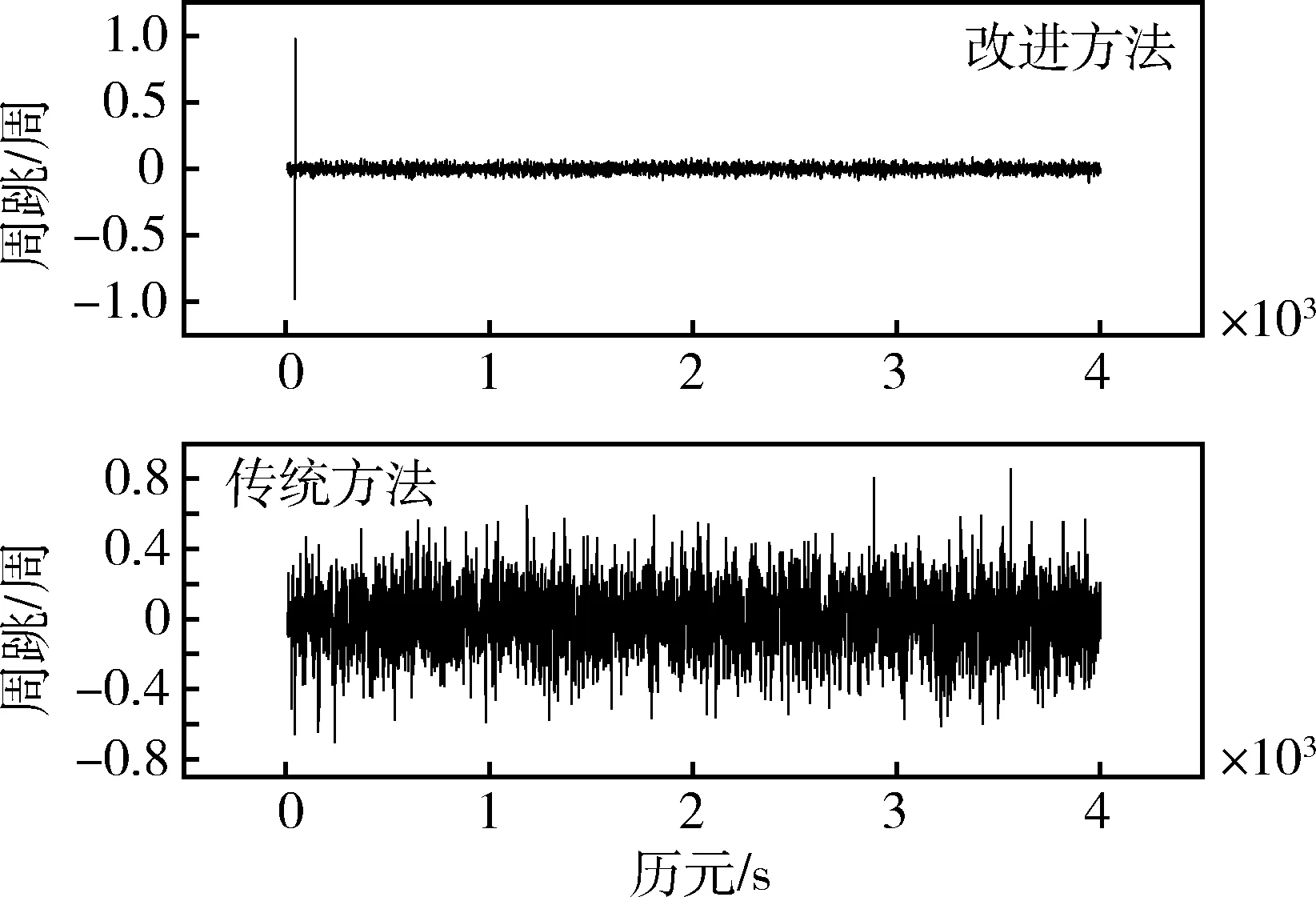
图2 第40历元处周跳探测
按照上述步骤在4000个历元中加入周跳。表1所示在4000个历元中选择14个历元添加小周跳。然后分别用传统多普勒周跳探测法和改进型多普勒周跳探测法对4000个历元进行周跳探测。图3为利用2种方法的探测结果。表1分别为2种方法在加入周跳的历元处进行周跳探测的结果。传统多普勒周跳探测法中154历元、1791历元、2882历元和3812历元探测值与加入的周跳值不符。传统法探测出的周跳值与预设周跳值一般相差0.2~0.5周,可以探测出发生周跳,但具体的周跳值可能无法准确探测,探测精度较差。表1中改进型多普勒周跳探测法探测的结果相比于传统多普勒周跳探测法探测的结果更接近预设的周跳值,与预设周跳值相差0.01~0.04周左右,对探测值取整得到的数值为最终周跳值。改进方法探测小周跳的能力明显优于传统方法。
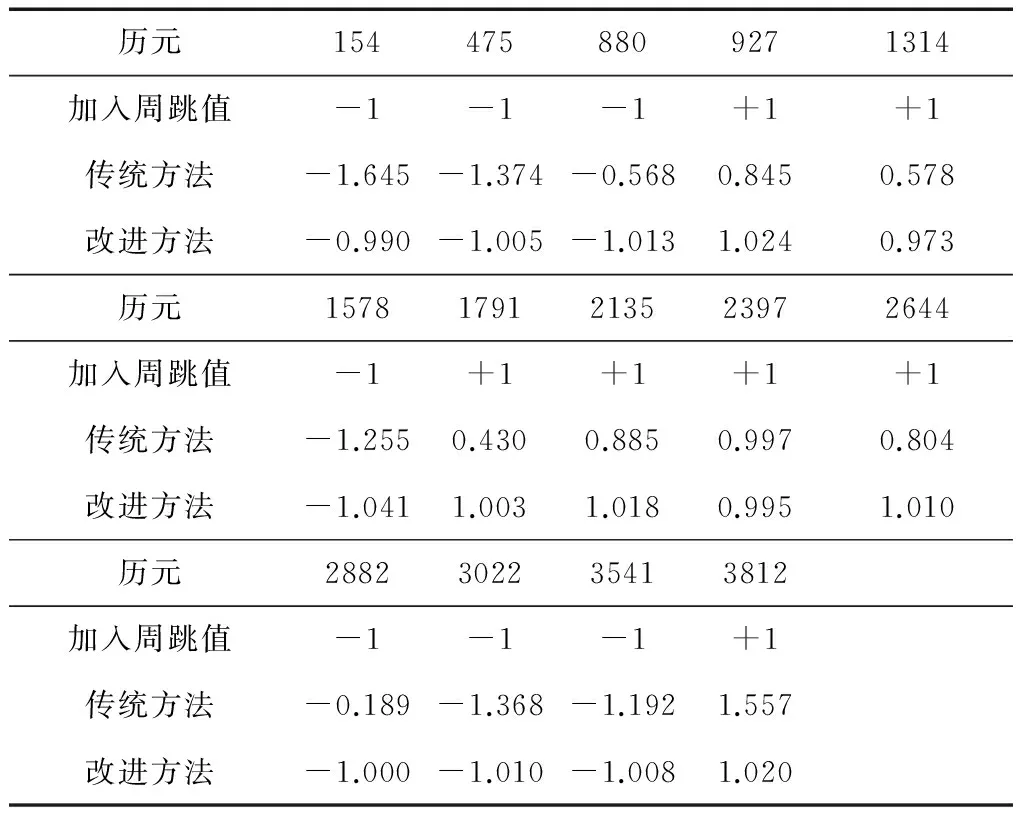
表1 2种多普勒周跳探测法探测周跳的结果

图3 加入小周跳探测结果
在4000个历元中选取14个历元加入较大周跳值,使用2种周跳探测方法进行探测。表2为加入周跳的情况,图4为探测结果。从表2和图4可看出,2种方法探测较大周跳的能力相近,但改进方法的探测值更接近预设周跳值,探测值与预设周跳值相差在0.05周以下。传统方法探测值与预设周跳值相差最大为0.377周。改进方法对较大周跳探测更灵敏。
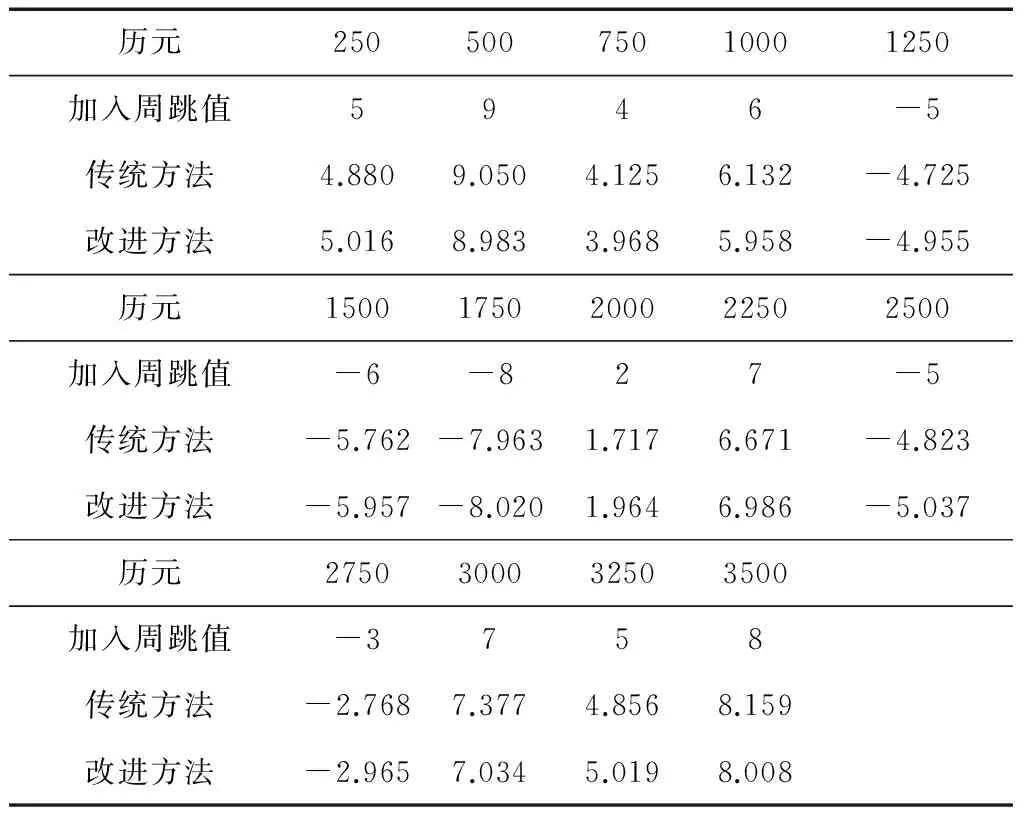
表2 2种多普勒周跳探测法探测周跳的结果

图4 加入较大周跳探测结果
表3为加入连续周跳情况,图5为2种方法探测结果。由图5明显观察到,改进方法对连续周跳的探测效果较好,传统方法不如改进方法探测效果明显。位于第234和235历元的周跳,传统多普勒周跳探测法并未探测出确切的周跳值与预设周跳不符。使用改进型多普勒周跳探测周跳时,判断周跳历元探测值与下一历元探测值是否绝对值相近符号相反,若是,则未发生连续周跳;反之,则发生了连续周跳。当发生连续周跳时,发生周跳历元的周跳值为其探测值,下一历元的周跳值等于前后2个历元探测值相加。如:第234和235历元改进方法探测出周跳分别为-1.002和-0.019,第235历元实际周跳值为-1.0210。第790和791历元探测值分别为:-0.998和2.016,第791历元实际周跳值为1.018。第1234和1235历元探测值分别为1.004和-2.043,第1235历元实际周跳值为-1.0390。将改进方法探测的各个历元周跳取整,数值与预设值吻合。

表3 2种多普勒周跳探测法探测周跳的结果

图5 连续周跳探测结果
3 结论
分析传统多普勒周跳探测的能力,其对小周跳探测能力不足。本文针对探测精确度不够的缺点,提出一种改进方法。在发生小周跳、大周跳和连续周跳的情况下进行周跳探测验证,对探测结果进行比较和分析。
1)改进方法探测小周跳的能力明显优于传统方法,用同一组无周跳数据进行试验,结果表明改进方法探测的周跳值标准差等于0.027,远小于传统方法周跳值标准差0.194。改进方法在周跳探测精确度上优于传统多普勒周跳探测法;
2)传统方法同样可以探测出大周跳,对比试验中2种方法探测值与预设周跳值之差,改进方法探测大周跳的灵敏性优于传统方法;
3)在发生连续周跳时,应用2种方法进行周跳探测,改进方法的探测效果优于传统方法。
改进方法提高了探测周跳的精确度,一定程度上抑制了多普勒和载波相位误差以及噪声的影响,探测出的探测值只需取整数便可得到最后的周跳值,并且可以探测出连续周跳值,具有一定的应用价值。
[1] Zhao Qile, Sun Binzi, Dai Zhiqiang, Hu Zhigang, Shi Chuang, Liu Jingnan. Real-time Detection and Repair of Cycle Slips in Triple-frequency GNSS Measurements [J]. GPS Solutions,2015,19(3):381-391.
[2] Maria Clara de Lacy,Mirko Reguzzoni,Fernando Sansò. Real-time Cycle Slip Detection in Triple-frequency GNSS[J].GPS Solutions,2012,16(3):353-362.
[3] 李金龙,杨元禧,徐君义,何海波,郭海蓉. 基于伪距相位组合实时探测与修复GNSS三频非差观测数据周跳[J].测绘学报,2011,40(6):717-728.(Li Jinlong,Yang Yuanxi,Xu Junyi,He Haibo,Guo Hairong. Real-time Cycle-slip Detection and Repair Based on Code-phase Combinations for GNSS Triple-frequency Un-differenced Observations[J]. Acta Geodaetica et Cartographica Sinica,2011,40(6):717-728.)
[4] 蔡昌盛,高井祥. GPS周跳探测及修复的小波变换法[J].武汉大学学报(信息科学版),2007,32(1):39-42.(Cai Changsheng,Gao Jingxiang.Cycle Slip Detection and Correction of GPS Data by Wavrlet Transform[J]. Geometrics and Information on Science of Wuhan University,2007,32(1):39-42.)
[5] 周亦军. 基于小波变换的北斗导航信号周跳探测与修复[J]. 船舶工程,2011,33(s2): 201-204.(Zhou Yijun. Cycle Slip Detection and Correction of COMPASS Based on Wavelet Transform[J]. Ship Engineering,2011,33(s2): 201-204.)
[6] 李明,高星伟,徐爱功.一种改进的多项式拟合方法[J].测绘科学,2008,33(4):82-83.(Li Ming,Gao Xingwei,Xu Aigong. A Modified Polynomial Fitting of Cycle-slip Processing[J]. Science of Surveying and Mapping,2008, 33(4):82-83.)
[7] 李征航,张小红,徐绍铨.卫星导航定位新技术及高精度数据处理方法[M].武汉:武汉大学出版社,2009:27-37.(Li Zhenghang,Zhang Xiaohong,Xu Shaoquan.New Techniques and Precise Data Processing Methods of Satellite Navigation and Positioning[M].Wuhan University Press,2009:27-37.)
[8] Cannon M E, Schwarz K P, Wei M, Delikaraoglou D. A Consistency Test of Airborne GPS Using Multiple Monitor Stations [J]. Journal of Geodesy,1992,66(1):2-11.
[9] 常志巧,郝金明,李俊义.利用多普勒观测检测周跳和粗差[J].测绘通报,2008,54(3):28-30.(Change Zhiqiao,Hao Jinming ,Li Junyi.Cycle Slip and Gross Error Checkout Using Doppler Observation[J].Bulletin of Surveying and Mapping,2008,54(3):28-30.)
[10] 董明,张成军,吕静,杨建明.基于星历计算的多普勒积分的周跳探测与修复[J].大地测量与地球动力学,2012,32(3):121-124.(Dong Ming,Zhang Chengjun,Lv Jing,Yang Jianming. Detecting and Repairing Cycle Slip by Using Doppler Integration Method Based on Ephemeris Calculation[J]. Journal of Geodesy and Geodynamics,2012,32(3):121-124.)
[11] 王普红,张小红,黄劲松.GPS单点测速的误差分析与精度评估[J].武汉大学学报(信息科学版),2007,32(6):515-520.(Wang Puhong,Zhang Xiaohong,Huang Jinsong. Errors Analysis and Accuracy Assessment of GPS Absolute Velocity Determination[J].Geometrics and Information on Science of Wuhan University,2007,32(6):515-520.)
An Improved Doppler Detection Method for Cycle Slip Detection
Zhang Xin, Cai Chenglin, Wu Guozeng, Cao Zhenqiang, Yu Honggang
Guilin University of Electronic Technology, Guilin 541004, China
AccordingtothetraditionalDopplerdetectionmethods,smallcycle-slipisdifficulttodetect.Inordertoresolvetheproblem,animprovedmethodisproposed.Intheprocedure,firstly, DopplervaluesareprocessedbypolynomialfittingforreducingDopplerobservationsnoiseandgettingextrapolatedDopplerdata.Then,theextrapolateddataareusedtodetectcycle-slip.Finally,detectionvalueofcurrentepochminusdetectionvalueofpreviousvalueiscycle-slip. BDSdataisusedtoverifythecorrectnessofthealgorithm.TheresultshowsthattheproposedalgorithmmakesupforthelackageoftraditionalDopplerdetectionmethod.Tinycycle-slipcanbeaccuratelydetectedinrealtime.ImprovedDopplerdetectionmethodtakesadvantageofoverridingindetectionsimplicityandreliability,etc.
Doppler;Cycleslip;Detectingandrepairing;Polynomialfitting;Realtime
*国家自然科学基金资助项目(61263028);中国科学院精密导航定位与定时技术重点实验室开放课题项目(2014PRNTT05);广西高校科学技术研究项目(KY2015ZD042);桂林电子科技大学研究生教育创新计划资助项目(2016YJCX14)
2016-03-28
张 炘(1992-),男,江西九江人,硕士研究生,主要研究方向GNSS定位原理与数据处理;蔡成林(1969-),男,湖南娄底人,博士,教授,主要研究方向为卫星导航与无线通信;吴国增(1989-),男,山东昌乐人,硕士研究生,主要研究方向为GNSS数据处理与定位实现;曹振强(1992-),男,河南永城人,硕士研究生,主要研究方向为室内多元融合导航技术;于洪刚(1992-),男,山东济南人,硕士研究生,主要研究方向GNSS精密卫星定位与组合导航。
P228
A
1006-3242(2016)05-0009-05
猜你喜欢
中外医疗(2016年15期)2016-12-01
光学精密工程(2016年6期)2016-11-07
科学与财富(2016年28期)2016-10-14
人民周刊(2016年15期)2016-09-28
电脑知识与技术(2016年4期)2016-04-11
科技视界(2016年7期)2016-04-01
电子器件(2015年5期)2015-12-29
机械与电子(2014年2期)2014-02-28
电子设计工程(2014年8期)2014-02-27
河北医科大学学报(2011年12期)2011-03-25