鲁棒故障检测和诊断方法在飞控系统中的应用
2016-08-10 10:40王伟沈振任章
航天控制 2016年5期
王 伟 沈 振 任 章
1.中国民航管理干部学院,北京100102 2.北京航空航天大学, 北京 100191
鲁棒故障检测和诊断方法在飞控系统中的应用
王 伟1沈 振1任 章2
1.中国民航管理干部学院,北京100102 2.北京航空航天大学, 北京 100191

针对全状态可测存在输入不确定性和故障的非线性系统,提出了一种鲁棒故障检测和诊断的方法。为使故障检测残差对故障敏感而对干扰不敏感,将残差生成问题转化为一个多目标优化问题,在干扰等不确定性到残差信号的传递函数最大奇异值为0的条件下,最大化故障到残差信号的传递函数最小值的奇异值,使残差对故障敏感而对不确定性不敏感。最后,以某飞机左升降舵和方向舵损伤故障为例,验证了该方法的有效性及快速性。 关键词 非线性系统;鲁棒故障检测和诊断;奇异值;飞控系统
飞行控制系统是现代先进飞机最重要的组成部分,对飞机的飞行性能和安全性起决定性作用。现代先进飞机由于系统结构日趋复杂和庞大,飞行环境相对恶劣,飞机性能要求严格,其可靠性已成为飞行控制系统设计中首要考虑的问题。根据美国联邦航空局的统计,大约有50%的致命飞机事故是由于飞机失控造成的。因此,研究飞控系统的故障检测和诊断方法成为提高可靠性的一条重要途径[1-6]。
传统的基于模型的故障检测诊断方法是故障检测诊断领域应用最广最有效的一种方法[7-15]。但是,该方法对系统精确模型的强依赖性已阻碍其进一步发展。因此,基于模型的故障检测和诊断方法的鲁棒性已成为故障检测与诊断理论研究与应用中必须解决的重要课题。鲁棒故障检测和诊断方法主要研究系统存在建模的不确定性,在外界干扰和噪音条件下,构造残差,使得残差对故障敏感,而对各种不确定性不敏感。对于线性不确定系统,鲁棒故障检测方法主要有基于未知输入观测器的方法[16]、基于特征结构配置的方法[16]和基于鲁棒观测器/滤波器的方法[17]等。
相比线性系统而言,对于飞控系统这类非线性系统的故障检测和诊断研究还不够成熟[18]。本文针对全状态信息全部可测量(或可以计算得到)的一类非线性系统,提出了一种鲁棒故障检测和诊断方法,将残差生成问题转化为一个多目标优化问题,使残差仅对故障敏感而对建模误差、干扰等不确定性不敏感,达到了残差和不确定性的完全解耦。
1 问题描述
考虑干扰和系统可能发生的故障,飞机系统通常可以简化为以下的非线性系统模型:

(1)
y=h(t,x,u)
(2)
其中,x∈Rn为系统的状态,u∈Rm为系统的输入,d∈Rnd为系统的干扰或建模误差等不确定性,f∈Rnf为系统可能发生的故障。假设:F,gd,gf,h为已知函数,且gd和gf为列满秩矩阵。
通常在干扰等不确定性存在的情况下,对上述系统进行故障检测诊断是非常困难的,但是,考虑非线性系统全部状态可直接测量或间接估计(如飞控系统),则问题可以简化。
令h(t,x,u)=x
(3)


(4)
则
e(t)=gd(t,x,u)d(t)+gf(t,x,u)f(t)
(5)
定义残差函数为:
μ=W(t,x,u)e=W(t,x,u)gd(t,x,u)d(t)+
W(t,x,u)gf(t,x,u)f(t)
(6)
其中,μ为残差,W∈Rnf为待设计的残差生成矩阵。为了达到干扰解耦的目的,应设计W(t,x,u),使得W(t,x,u)gd(t,x,u)为0或尽量小,同时使残差中尽量完整的反映故障函数f(t)。
2 残差生成
将残差生成问题转化为以下数学问题[19]:
(7)
其中,r≥0为一个较小的正数,W为残差生成矩阵。理想情况下应设计W,使得r=0,则Wgd=0,即干扰完全解耦。定理1给出了W的设计方法。
定理1:gd的奇异值分解[6]如下:
(8)
Ud∈Rn×n,0<∑d∈Rnd×nd,Vd∈Rnd×nd。
定义:
(9)

(10)
那么,设计最优鲁棒故障检测残差生成矩阵为
(11)
且满足
(12)
如果rank[gd,gf]=nd+nf,则

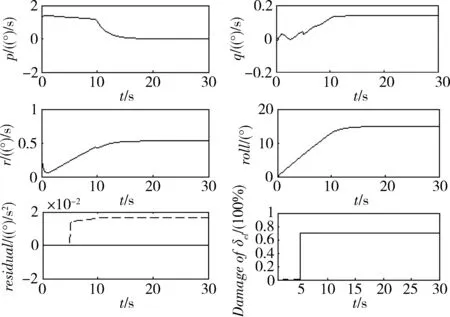
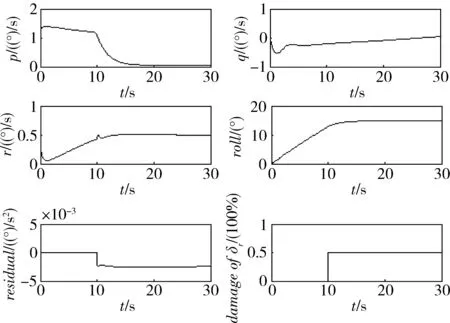
如果rank[gd,gf] 证明:不失一般性,假设W具有下列分解形式: (13) 其中,W1∈Rnf×nd,W2∈Rnf×(n-nd)。 因为 (14) 所以,W1=0。 (15) 进一步得到, (16) 由于 (17) 令 (18) 由式(18)可知W2的一个最优解为: (19) 由此可得 下面求解rank[gd,gf],因为 (20) 由式(20)可知: 设 q=rank[gd,gf]≤nd+nf (21) q=nd+nf,则 q (22) q 推论1 为实现故障诊断,定义 μf=Wf(t,x,u)e(t) (23) 如果q=nd+nf,则 (24) 得到 Wfgd=0,Wfgf=Inf (25) 即残差中仅含有故障信号, 干扰完全从残差中解耦,且μf(t)=f(t)。 如果q (26) 这意味着在解耦干扰的同时和干扰在同一方向上的故障被解耦了,这些故障是无法被检测到的。 以某高空长航时飞机[20]为例进行仿真验证。飞机的质量为130000kg,机翼面积260m2,马赫数为0.881,高度为5km。操纵面为升降舵、副翼和方向舵。传统的飞机操纵为升降舵左右联动,提供俯仰力矩;副翼左右差动,提供滚转力矩,同时与方向舵联合动作控制偏航运动;飞机的纵、侧向解耦。为实现对各个舵面损伤的故障检测诊断及控制重构,将传统的操纵面左右平尾,左右副翼分离,变为各自独立的操纵面。舵面分离后,控制输入δe,δa,δr和操纵输入δel,δer,δal,δar,δr之间的关系为: (27) (28) 其中,x=[p,q,r,V,α,β],V,α,β分别为飞机的空速,攻角和侧滑角;u=[δal,δar,δel,δer,δr],δalf,δarf,δelf,δerf,δrf为5个可能出现的舵面故障。由定理1可知,用3个状态变量同时检测出5个舵面故障是不可能的,因为定理1是在n≥nd+nf的条件下得到的。不失一般性的考虑,某一段时间内仅有一个舵面发生故障,将舵面进行分组,左右升降舵为一组(即左右升降舵同时出现故障可检测),左右副翼为一组(即左右副翼同时出现故障可检测),方向舵单独为一组,分别设计3个残差生成矩阵,估计每个舵面的故障损伤率为k%,某个舵面发生损伤故障时,其对应的k%会发生跳变且保持恒定。 以左升降舵故障为例,利用定理1和推论1经过计算: rel=δelf=k%*δel (29) 其中,rel为左升降舵对应的故障检测残差,除以δel得到左升降舵的故障损伤率。考虑到飞行时舵面偏角可能会经常穿越0点或状态量突变会造成检测值k%的瞬时突变,算法中对检测值k%进行20次连续验证,即连续20次保持该值,才确认为是最终损伤率。 以左升降舵故障为例,飞机在5km的高空,以φc=15°盘旋飞行,无故障时,阵风干扰下飞机的状态和左升降舵损伤率如图1所示。 图1 正常情况下飞机状态响应和故障检测残差 图1中,从左至右,由上到下,前3幅图分别表示飞机滚转角速度、俯仰角速度和偏航角速度,第4幅图表示飞机滚转角,第5幅图分别以虚线和实线表示左右升降舵的故障检测残差,第6幅图表示左升降舵故障损伤率。可知在正常情况下,飞机以15°的滚转角进行盘旋飞行,左右升降舵的故障检测残差为0,故左升降舵的故障损伤率也为0。图2表示左升降舵在5s时发生损伤70%的故障,在阵风干扰和故障下飞机的状态响应和故障损伤率。对应于右升降舵的故障检测残差(实线)仍然为0,对应于左升降舵的故障检测残差(虚线)不再为0,第6幅图给出了经过验证后的故障损伤率等于70%。 图2 左升降舵故障时飞机状态响应和故障损伤率 以方向舵故障为例,飞机以给定的滚转角φc=15°进行盘旋飞行时,在5s时方向舵损伤率为50%,在滚转力矩上加入建模误差干扰Δl=l*0.4sin(5t),故障下飞机的状态响应和损伤率计算结果如图3所示。 图3 方向舵故障时飞机状态响应和故障损伤率 由图3可知,利用定理1和推论1提出的方法可以检测到飞机方向舵故障损伤率为50%。 对飞控系统这类全状态信息可获取的非线性系统,提出了一种鲁棒故障检测和诊断的方法。将残差生成问题转化为一个多目标优化问题,在干扰等不确定性到残差信号的传递函数的最大奇异值为0的条件下,最大化故障到残差信号的传递函数的最小值奇异值,使残差对故障敏感而对不确定性不敏感。最后以某型飞机为例,验证了该方法的有效性和实时性。 [1]ZhangYoumin,JiangJin.DesignofIntegratedFaultDetection,DiagnosisandReconfigurableControlSystems[C].Proceedingofthe38thConferenceonDecision&Control,Phoenix,ArizonaUSA, 1999. [2] 沈毅,罗昌行,邓建华.飞行控制系统故障检测方法研究[J].飞行力学,2001,19(5):21-25. (ShenYi,LuoChangxing,DengJianhua.StudyofFailureDetectionMethodsinFlightControlSystems[J].FlightDynamics, 2001,19(5):21-25.) [3] 姜斌,杨浩.飞控系统主动容错控制技术综述[J].系统工程与电子技术,2007,29(12): 2106-2110. (JiangBin,YangHao.SurveyoftheActiveFault-tolerantControlforFlightControlSystem[J].SystemsEngineeringandElectronics, 2007, 29(12): 2106-2110.) [4] 邱浩, 王道波, 张焕春. 控制系统的故障诊断方法综述[J]. 航天控制,2004,22(2): 53-60.(QiuHao,WangDaobo,ZhangHuanchun.ReviewofFaultDiagnosisMethodofControlSystem[J].AerospaceControl, 2004,22(2): 53-60.) [5]HwangI,KimS,KimY,SeahCE.ASurveyofFaultDetection,Isolation,andReconfigurationMethods[J].IEEETransactionsonControlSystemsTechnology, 2010,18(3):636-653. [6]CaliseAJ,LeeS,SharmaM.DevelopmentofaReconfigurableFlightControlLawforTaillessAircraft[J].JournalofGuidance,ControlandDynamic, 2001,24(5):896-902. [7]BeardRV.FailureAccommodationinLinearSystemsThroughSelf-reorganization[R].Cambridge:MassachusettsInstituteofTechnology,1971. [8]FrankPM.EnhancementofRobustnessinObserver-basedFaultDetection[J].InternationalJournalofControl, 1994, 59(4):955-981. [9] 刘剑慰.基于模型的飞行控制系统故障诊断方法研究[D].南京:南京航空航天大学自动化学院,2014.(LiuJianwei.ResearchofModelBasedFaultDiagnosisforFlightControlSystems[D].Nanjing:NanjingUniversityofAeronauticsandAstronautics, 2014.) [10] 吴丽娜. 基于模型的不确定系统鲁棒故障检测与估计方法研究[D].哈尔滨:哈尔滨工业大学控制科学与工程系,2013.(Wulina.ResearchofModelBasedFaultDetectionandEstimationMethodsforUncertainSystems[D].Harbin:HarbinInstituteofTechnology, 2013.) [11] 金磊, 徐世杰. 基于扩张状态观测器的飞轮故障检测与恢复[J]. 北京航空航天大学学报,2008,34(11):1272-1275.(JinLei,XuShijie.ExtendedStateObserver-basedFaultDetectionandRecoveryforFlyWheels[J].JournalofBeijingUniversityofAeronauticsandAstronautics, 2008,34(11):1272-1275.) [12]ZhangJQ,YanY.AWavelet-BasedApproachtoAbruptFaultDetectionandDiagnosisofSensors[J].IEEETransactionsonInstrumentationandMeasurement, 2001,50(5):1389-1396. [13]HerediaG,OlleroA,MahtaniR,BejiaM,etal.DetectionofSensorFaultsinAutonomousHelicopters[C].IEEE,InternationalConferenceonRoboticsandAutomation,Barcelona,Spain,April2005:2229-2234. [14] 李文博,王大轶,刘成瑞.卫星姿态确定系统的故障可诊断性分析方法[J].航天控制,2014,32(6):50-56.(LiWenbo,WangDayi,LiuChengrui.AnApproachtoFaultDiagnosabilityAnalysisofSatelliteAttitudeDeterminationSystems[J].AerospaceControl, 2014, 32(6):50-56.) [15]WuLina,ZhangYingchun,LiHuayi.ResearchonFaultDetectionforSatelliteAttitudeControlSystemsBasedonSlidingModeObservers[C].The2009IEEEInternationalConferenceonMechatronicsandAutomation,Changchun,China, 2009, 4408-4413. [16]ChenJie,PattonRJ.RobustModel-BasedFaultDiagnosisforDynamicSystems[M].Boston:KluwerAcademicPublishers, 1999:65-135. [17]ShenLC,HsuPL.RobustDesignofFaultIsolationObserver[J].Automatica, 1998, 34(11): 1421-1429. [18] 周东华,叶银忠. 现代故障诊断与容错控制[M]. 北京:清华大学出版社,2000.(ZhouDonhua,YeYinzhong.FaultDiagnosisandFault-tolerantControl[M].Beijing:TsinghuaUnicersityPress, 2000.) [19] 周克敏,DoyleJC,GloverK. 鲁棒与最优控制[M]. 北京:国防工业出版社, 2002.(ZhouKemin,DoyleJC,GloverK.RobustandOptimalControl[M].Beijing:NationalDefenceIndustryPress, 2002.) [20] 陈蓓.控制系统重构技术在高生存力飞行控制系统设计中的应用[D].西安:西北工业大学自动化学院,2004. (ChenBei.ApplicationofControlReconfigurationforFlightControlSystems[D].Xi’an:SchoolofAutomation,NorthwesternPolytechnicalUniversity, 2004. 《航天控制》选题大纲 1 总体与系统技术 1.1 航天器动力学模型技术 1.2 航天器控制系统方案设计 1.3 系统集成与一体化设计技术 2 制导、导航和控制技术 2.1 先进的信息与控制理论及应用 2.2 全程复合制导技术(星光、卫星导航系统) 2.3 精确末制导技术 2.4 航天器自主导航和组合导航技术 2.5 新型运载火箭控制系统研究 2.6 系统精度与毁伤效果的评估和分析 2.7 卫星姿态轨道控制技术研究 2.8 航天器交会对接、返回与救生技术 2.9 深空探测与着陆技术 2.10卫星编队飞行与星座控制技术 2.11拦截器制导与控制技术 2.12机器人动力学与控制 2.13控制系统“标准化、通用化、组合化”技术 2.14航天器测控通信技术 2.15伺服控制设计 3 计算机技术与仿真技术 3.1 嵌入式计算机系统设计技术 3.2 软件工程与评测技术 3.3 CAX设计 3.4 人工智能与专家系统技术 3.5 系统仿真技术 3.6 半实物仿真与设计、试验技术 4 测试、发射和控制技术 4.1 测试发射控制一体化技术 4.2 快速机动测控技术 4.3 航天器地面测试自动化 4.4 C4ISR技术 4.5 水平瞄准、快速定位定向技术 4.6 系统信息流控制技术 5 可靠性、安全性和维修性 5.1 可靠性、安全性、维修性和保障性设计、分析和试验技术 5.2 软件可靠性及优化技术 5.3 冗余设计技术 5.4 故障诊断技术 6 光机电一体化技术 6.1 片上系统(SOC)技术 6.2 航天器姿态敏感器 6.3 目标探测器 6.4 惯性测量装置 6.5 光学陀螺 6.6 推进器技术 6.7 飞行控制执行机构 6.8 电磁兼容设计与试验技术 6.9 表面装贴技术 6.10减振技术研究 6.11多功能结构设计与标准化技术 The Application of Fault Detection and Diagnosis Method to Flight Control System Wang Wei1, Shen Zhen1, Ren Zhang2 1. Civil Aviation Management Institute of China, Beijing 100102, China 2. Beihang University, Beijing 100191, China Arobustfaultdetectionanddiagnosismethodfornonlinearsystemswithfullstateinformationisintroduced.Amulti-objectivefaultdetectioncriterionisproposedtobesolvedbymaximizingthesmallestsingularvalueofthetransformationfromfaultstofaultdetectionresidualswhiledecouplingorminimizingthelargestsingularvalueofthetransformationfromdisturbancetothefaultdetectionresiduals.Thismethodisappliedtoanaircraftandthecasestudyisintroducedbythedamagefaultofaircraftleftelevatorandrudder.Thesimulationresultsshowtherapidityandhighefficiency. Nonlinearsystem;Robustfaultdetectionanddiagnosis;Singularvalue;Flightcontrolsystem 2016-04-11 王 伟(1981-),女,河南林州人,博士,讲师,主要研究方向为非线性系统控制、自修复飞控系统;沈 振(1980-),男,浙江嘉兴人,博士,讲师,主要研究方向为高超声速航空器控制;任 章(1957-),男,河南濮阳人,博士,教授,主要研究方向为导航、制导与控制。 TP306 A 1006-3242(2016)05-0093-05



3 仿真验证


4 结论