升力体布局飞行器BTT协调转弯驾驶仪研究
2016-08-10 10:40王晓晖贾平会王永海
航天控制 2016年5期
李 强 童 伟 王晓晖 贾平会 王永海
北京航天长征飞行器研究所,北京 100076
升力体布局飞行器BTT协调转弯驾驶仪研究
李 强 童 伟 王晓晖 贾平会 王永海
北京航天长征飞行器研究所,北京 100076

针对升力体布局飞行器BTT协调转弯控制问题,提出了两回路+PI校正的偏航过载驾驶仪结构及近似构造内回路侧滑角速度反馈的实现方法。重点分析了转弯加速度对弹体偏航通道影响的特点,并基于干扰输出最小原理确定了两回路+PI校正的过载驾驶仪结构,保证系统的快速性及稳定性。论证了内回路侧滑角速度反馈能使干扰收敛至零的本质,并利用偏航角速度+前馈补偿近似构造侧滑角速度反馈,确保方法的工程可实现性。仿真结果表明,该驾驶仪结构能实现转弯过程中侧滑快速归零,提高协调转弯能力,鲁棒性较强,具有一定工程应用价值。 关键词 升力体布局飞行器;BTT控制;协调转弯;回路设计;侧滑角速度反馈
随着现代战争远程、快速、精确打击任务重要性的不断凸显,升力体布局飞行器受到了广泛关注,飞行器通常具有大升力体气动外形,采用无动力方式完成大气层内远距离飞行,到达目标上空后快速转入攻击弹道,实现较大范围的快速精确打击。该类飞行器具备弹道导弹远射程、速度高和飞航导弹升阻比大、机动性强的优点,潜在的军事价值使其成为了各军事强国的关注热点及重点研究方向[1]。
独特的大升阻比气动外形及高机动性能要求飞行器必须采用倾斜转弯方式,较大的滚转速率及飞行攻角使得BTT飞行器各通道之间存在强烈的耦合[2]。俯仰及滚转通道快速响应控制指令,偏航通道则必须实现快速协调转弯,尽量消除侧滑角,减小通道间的耦合影响,保证控制系统稳定,因此协调转弯支路设计是BTT飞行器控制系统亟待解决的重要难题。
对于协调转弯技术,国内外学者开展了诸多相关研究,取得了重要研究成果,考虑到飞行器硬件约束和算法可实现性及可靠性等要求,基于经典控制理论的驾驶仪设计仍然在工程应用中占据主导地位。设计方法大致上可以分成3种:1)利用侧滑角反馈直接消除侧滑角;2)考虑弹体偏航加速度主要由侧滑角产生,利用偏航加速度反馈实现侧滑角归零;3)基于在一定滚转角和飞行速度下,维持偏航角速度不变的原理实现协调转弯。大量研究表明,侧滑角反馈是实现协调转弯的最直接方法,但是其在有风条件下的准确测量问题使其应用受到了一定限制;偏航角速度不变设计方法的系统结构相对复杂,且反馈信息无法直接测量的特点使其并不常用;偏航加速度反馈由于系统结构简单和易于工程应用等特点,成为了协调转弯实现较为普遍的形式[3-5]。
本文基于偏航加速度反馈设计思想,重点分析驾驶仪结构对协调转弯性能的影响,确定了提高驾驶仪开环增益是实现协调转弯的关键,由此提出在前向通道增加PI校正网络的过载驾驶仪结构,对比分析内回路反馈形式对控制性能的影响,针对工程可实现性要求,提出了近似构造侧滑角速度反馈的内回路形式,进一步提高了飞行器协调转弯能力。
1 偏航通道弹体特性分析
飞行器BTT转弯过程中,弹体纵向对称面的升力在惯性系内分解得到侧向转弯加速度azd,azd拉动速度矢量偏转,进而产生侧滑角。基于线性小角假设,可得到偏航通道动力学方程如下[6]
(1)

建立状态方程如下

(2)

(3)
表面上,azb与azd没有直接关系,但由于azd对ψV有影响,因此也对azb产生影响,通过推导得到传递函数如下

(4)

(5)


(6)
(7)
可以看出,弹体静稳定性越低,对应弹体频率越小,转弯过程中转弯加速度产生的弹体偏航加速度和角速度越大,侧滑角也越大,越不利于协调转弯。

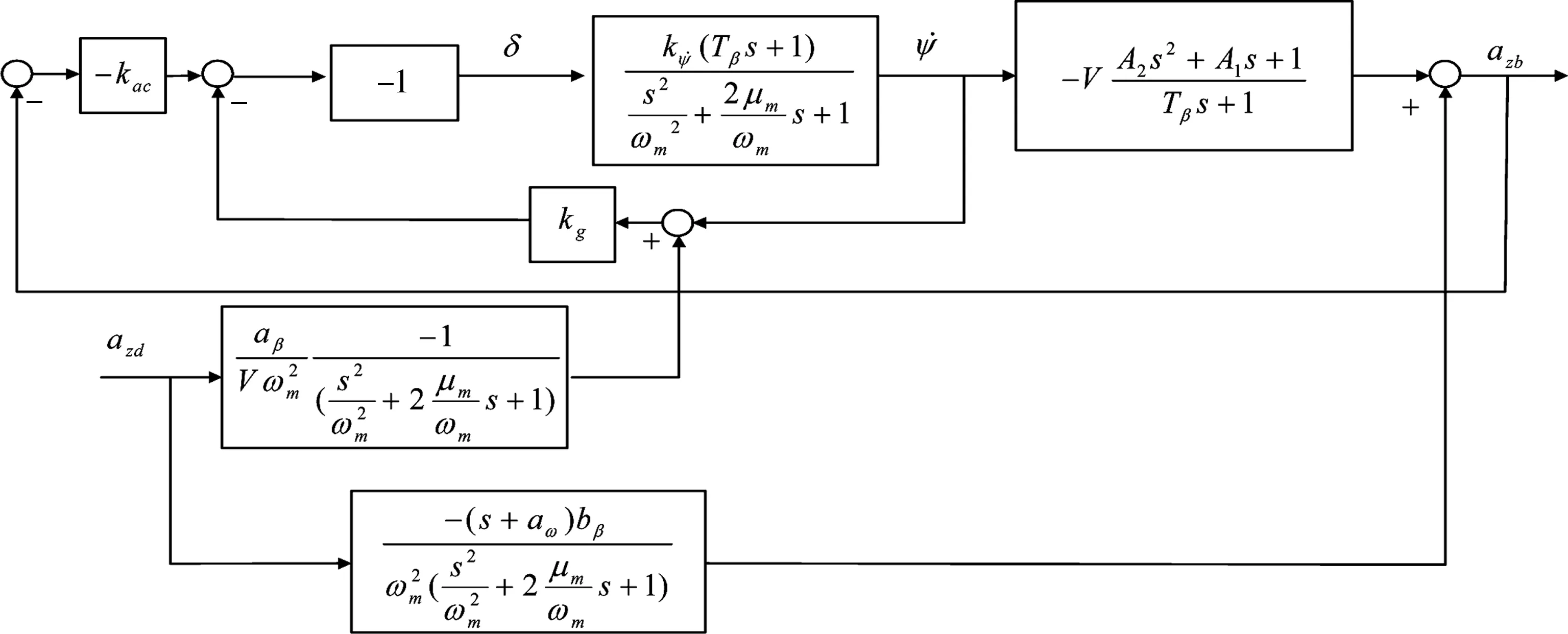
图1 典型协调转弯支路原理框图
2 协调转弯驾驶仪结构分析
将图1的驾驶仪结构进行转换,得到azd输入条件下的协调转弯两回路过载驾驶仪框图如图2所示。
比如说,在教学“以此函数的图像和性质”时,教师要做好启发的准备,要让学生去走进实际知识中。教师可以为学生准备这样的一个题目,x=(n-1)y-2n是x关于y的一次函数,你可以添加一个适当的条件求出它的解析式吗?在提问后,教师可以先告诉学生,这个答案是不限制一个的,你们可以尝试多求出几个答案。学生在分析这道题中,其思维可以得到有效的释放,由于答案不限制一项,就算是某些学生算的比较快,其他学生也都能投入到计算中。同时随着学生们纷纷说出自己的答案,课堂的导向也从教师转变为学生,学生主体性得到有效的展现,不仅活跃了课堂的氛围,学生的思维也得到了有效的发散。
得到azd到azb的传递函数为
(8)
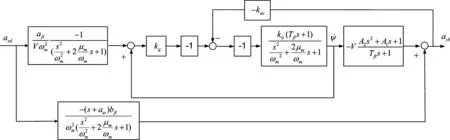
图2 azd输入下两回路过载驾驶仪框图
定义Kazb/azd为单位转弯加速度所产生的稳定偏航弹体加速度,则Kazb/azd越小,表征驾驶仪协调转弯能力越强,于是有

(9)
两回路驾驶仪的开环增益为:
(10)
将式(10)代入式(9)有

(11)

分别选取驾驶仪开环增益KG1=0.49和KG2=0.98,以1g转弯加速度azd为输入,仿真结果如图3和图4所示。

图3 开环增益对协调转弯能力影响
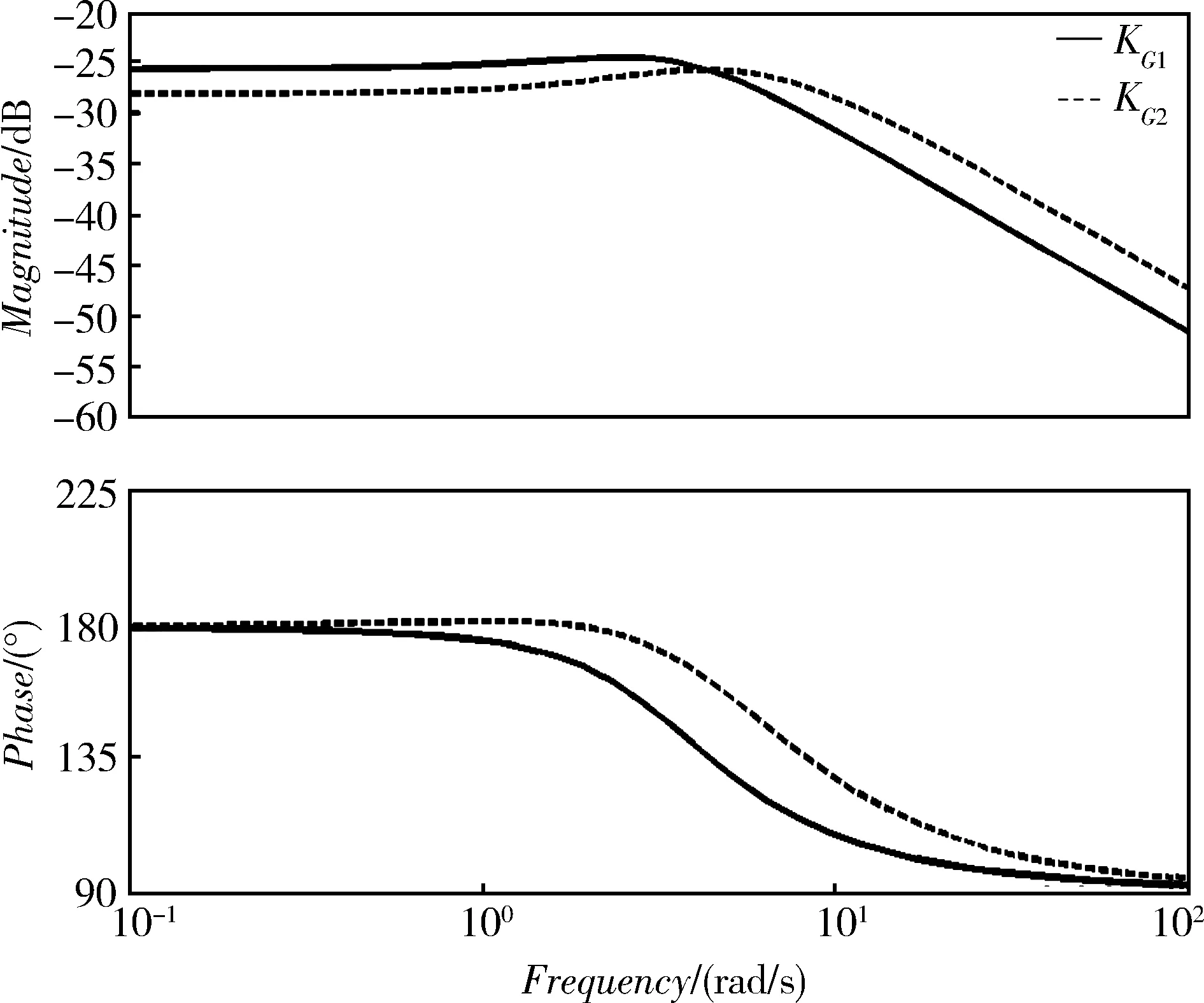
图4 不同开环增益驾驶仪Bode图
由图3可以看出,增加开环增益能够有效减小稳态输出,减小干扰影响;由图4可以看出,增加开环增益使得低频幅值衰减增大,增加了一定的协调转弯能力,但低频幅值仍为定值,并不能保证偏航加速度归零。完全消除偏航加速度则需要较大的开环增益,而提高开环增益必然导致系统带宽增大,稳定裕度降低,甚至造成系统失稳,因此实现快速协调转弯最有效的方法就是设计PI校正网络,增加系统低频幅值衰减,并保证系统的稳定特性[7]。
前向通道增加PI校正后,azd输入下两回路+PI过载驾驶仪框图如图5所示。其中,Ti为PI校正时间常数。取开环增益KG1=0.49,相同1g转弯加速度azd输入下的仿真结果如图6和图7所示。
3 内回路反馈特性研究


图5 azd输入下两回路+PI过载驾驶仪框图

图6 1g转弯加速度输入时仿真曲线
图7 不同开环增益Bode图对比曲线
由式(1)有
(12)


(13)

(14)
其中,kβ,B1为偏航动力学系数,定义参见文献[2]。式(13)进一步证明了稳态时转弯加速度输入下的侧滑角速度是0的结论,因此相比于偏航角速度内回路反馈,侧滑角速度内回路反馈能更好的实现偏航加速度归零。
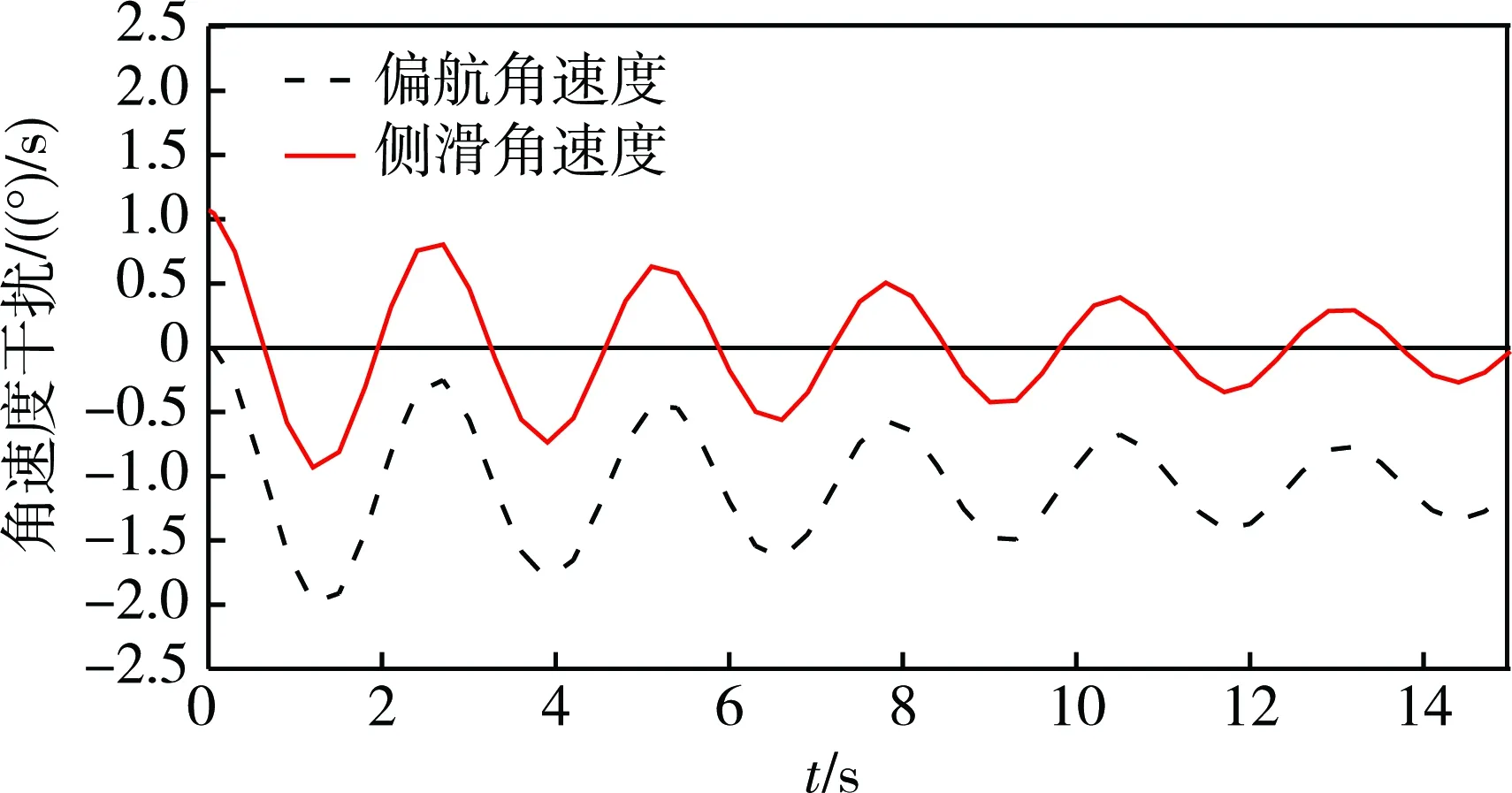
图8 内回路偏航角、侧滑角速度曲线
4 侧滑角速度内回路的工程实现
内回路侧滑角速度反馈对于提高协调转弯能力是有效的,但实际应用中侧滑角速度的精确测量仍然存在一定难度,通过信号微分容易带来严重的噪声问题。考虑通道耦合时,弹体系偏航通道质心动力学有如下关系[9-10]
(15)
其中,Vxb,Vyb,Vzb分别为弹体系三向速度,ωxb,ωyb分别为滚转、偏航角速度,Fcz为偏航通道合力,m为飞行器质量。进行转换有

(16)
近似有β=Vzb/Vxb,且tanα=-Vyb/Vxb;Fcz包含气动力和重力两部分,可以表示为Fcz=Fczb+mgcosϑsinγ,由于协调转弯偏航加速度指令为0,则可以认为气动力分量Fczb=0,g为重力加速度,ϑ,γ分别为俯仰和滚转姿态角,近似认为Vxb=V,则由式(16)可得内回路反馈为
(17)
侧滑角速度由3项构成:ωyb为角速度反馈,可以直接测量;ωxbtanα为运动学补偿项,可以通过测量滚转角速度和攻角得到;gcosϑsinγ/V为重力补偿项,可以通过测量姿态角和速度得到。因此在偏航角速度反馈的基础上引入运动学和重力补偿项后,本质上近似构造了侧滑角速度反馈,从而使偏航过载驾驶仪协调转弯性能更优,且更易于工程实现。
图9给出了考虑通道耦合影响下偏航通道过载驾驶仪原理框图,驾驶仪采用两回路+PI校正的系统结构,运动学和重力补偿构成前馈补偿,并与偏航角速度叠加构成了内回路近似侧滑角速度反馈。
选取偏航通道加速度指令azbc=0,俯仰通道攻角指令为αc=10°,滚转通道滚转角指令γc=45°,图10和图11给出了内回路采用不同反馈形式的偏航加速度和舵偏角曲线。
采用偏航角速度+前馈补偿的反馈形式在转弯过程中能够明显减小偏航加速度最大值,并更快将偏航加速度收敛至0,进而减小侧滑角,提高弹体协调转弯能力,与侧滑角速度反馈性能相当。相比于偏航角速度反馈,偏航角速度+前馈补偿的反馈形式需要更多的舵资源加快侧滑角归零的速度,因此转弯过程中偏航通道应该具有足够的舵资源。
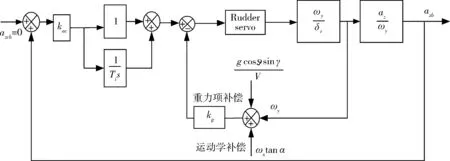
图9 偏航通道驾驶仪原理框图

图10 不同内回路反馈偏航加速度曲线
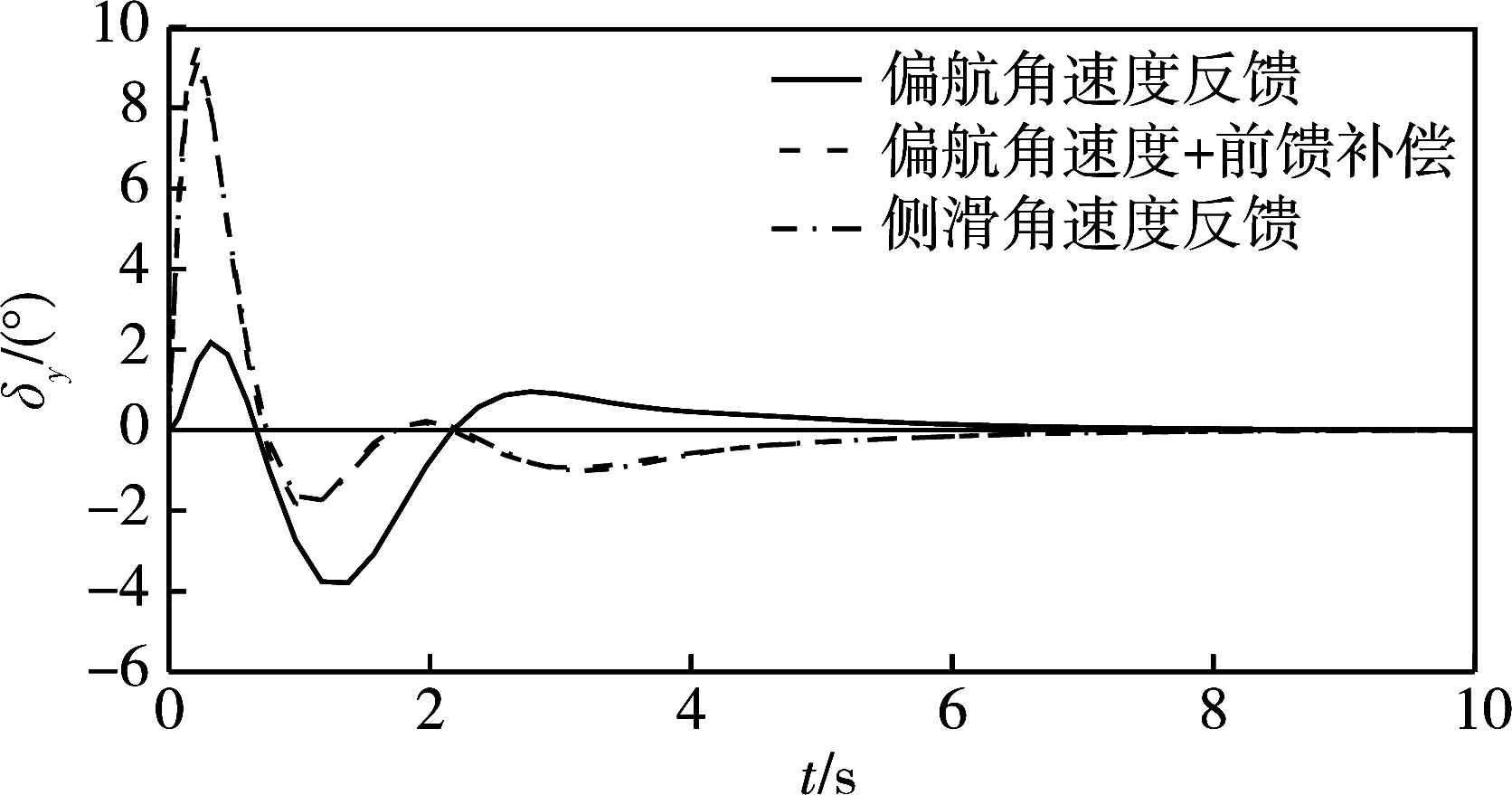
图11 不同内回路反馈偏航舵偏角曲线
5 结论
深入探讨了偏航通道协调转弯性能,提出了两回路+PI校正的偏航过载驾驶仪结构,分析验证了内回路侧滑角速度反馈有利于偏航加速度控制的本质,并提出了近似构造侧滑角速度反馈的工程实现形式,确定了偏航通道驾驶仪系统。仿真结果表明,本文提出的偏航驾驶仪系统能够明显减小转弯加速度和通道间耦合影响,有效提高了飞行器协调转弯能力,对升力体布局飞行器控制系统设计具有一定的工程应用价值。
[1] 李瑜. 助推-滑翔导弹弹道优化与制导方法研究[D]. 哈尔滨:哈尔滨工业大学,2009.(LiYu.StudyofTrajectoryOptimizationandGuidanceAlgorithmforBoost-glideMissile[D].Harbin:HarbinInstituteofTechnology,2009.)
[2] 何镜. 非圆截面BTT导弹末导段制导控制关键技术研究[D]. 北京: 北京理工大学,2012.(HeJing.KeyTechnologyResearchonGuidanceandControlofBank-to-turnMissilewithNon-circularCrossSectioninTerminalGuidancePhase[D].Beijing:BeijingInstituteofTechnology,2012.)
[3] 孙宝彩. 巡航飞行导弹BTT自动驾驶仪设计方法研究[D].北京:北京理工大学,2007.(SunBaocai.ResearchonBTTAutopilotDesignforCruiseMissile[D].Beijing:BeijingInstituteofTechnology,2007.)
[4]ArrowA.AnAnalysisofAerodynamicRequirementsforCoordinatedBank-to-TurnAutopilots[R].NASA-CR-3644,Nov. 1982.
[5]WilliamsDE,FriedlandB.ModernControlTheroryforDesignofAutopilotsforBank-to-TurnMissiles[J].J.Guidance,1987,10(4):378-386.
[6]GarnellP.GuidedWeaponControlSystems[M].London:RoyalMilitaryCollegeofSciencePress, 2004:161-172.
[7]PaulZarchan.TacticalandStrategicMissileGuidance[M].Virginia:AmericanInstituteofAeronauticsandAstronauticsInc, 2007:498-507.
[8]MingXin,SNBalakrishnan,DonaldTS,etal.NonlinearBank-to-Turn/Skid-to-TurnMissileOuter-Loop/Inner-LoopAutopilotDesignWithθ-DTechnique[C].AIAAGuidance,Navigation,andControlConferenceandExhibit.Austin,Texas, 2003,August11-14.
[9]JohnRCleminson,RickAHyde.ControlandManeuverabilityofaSquareCross-SectionMissile[J].JournalofGuidance,ControlandDynamics, 2006, 19(1):25-38.
[10] 童春霞,王正杰,张天桥.BTT导弹的变结构解耦控制系统设计[J]. 宇航学报,2006,27(1):27-30.(TongChunxia,WangZhengjie,ZhangTianqiao.DecouplingSystemDesignBasedonVariableStructureSystemforBTTMissile[J].JournalofAstronautics, 2006, 27(1):27-30.)
Study on BTT Coordinated Turn Autopilot Design for Lifting Vehicles
Li Qiang,Tong Wei,Wang Xiaohui,Jia Pinghui,Wang Yonghai
Beijing Institute of Space Long March Vehicle, Beijing 100076,China
RegardingBTTcoordinatedturncontrolofreentryglidingvehicle,two-loopaccelerationyaw-autopilotwithPIcompensationandtheengineeringapproximationofsideslipanglevelocityfeedbackforautopilotinner-loopareproposed.Theeffectofturningaccelerationtobody-frameyawisanalyzedespeciallyandsystemrapidityandstabilityoftwo-loopaccelerationyaw-autopilotwithPIcompensationisensuredbyturningacceleration,whichisbasedonminimumoutput.Theconvergenceessenceofsideslipanglevelocityfeedbackisclarified.Furthermore,theengineeringimplementationcomposedbyyawrateandfeedforwardcompensationispresented.Finally,thesimulationresultsdemonstratethattheautopilotdesigncanmakesideslipangletobezerorapidlyandtheperformanceofcoordinatedturnisimproved.Thedesignhasstrongrobustnessandhighpracticevalue.
Liftingvehicles; BTTcontrol;Coordinatedturn;Autopilotdesign;Sideslipanglevelocityfeedback
2016-02-03
李 强(1986-),男,黑龙江人,博士,工程师,主要研究方向为飞行器总体与制导控制;童 伟(1978-),男,江苏人,硕士,高级工程师,主要研究方向为飞行器制导控制;王晓辉(1972-),男,陕西人,硕士,研究员,主要研究方向为飞行力学;贾平会(1988-),男,内蒙古人,硕士,工程师,主要研究方向为飞行力学;王永海(1978-),男,辽宁人,硕士,研究员,主要研究方向为飞行器总体设计。
TJ576.3
A
1006-3242(2016)05-0052-07