MRI向导的手术针介入系统设计与兼容性研究
2016-07-22 11:21:13王文东邹英杰史仪凯班超袁小庆
西北工业大学学报 2016年3期
关键词:实验设计
王文东, 邹英杰, 史仪凯, 班超, 袁小庆
(1.西北工业大学 机电学院, 陕西 西安 710072; 2.武警工程大学 装备工程学院, 陕西 西安 710086)
MRI向导的手术针介入系统设计与兼容性研究
王文东1, 邹英杰1, 史仪凯1, 班超2, 袁小庆1
(1.西北工业大学 机电学院, 陕西 西安710072; 2.武警工程大学 装备工程学院, 陕西 西安710086)
摘要:磁共振图像向导的手术机器人以其定位精度高、重复性好等特点在临床医学中有重要应用价值。为研究其开发过程中的磁共振兼容性和手术过程力反馈的关键技术问题,理论分析了涡电流对磁共振图像的影响,设计了通用、简单且满足磁共振兼容性要求的力反馈系统和针介入手术系统模型,完成了磁共振兼容性以及图像向导实验设计。实验结果表明:力反馈系统和手术针介入系统的磁共振图像兼容性良好,控制系统和数据采集系统工作正常;超声波电机作为一种新的驱动方式可以用于构建MR图像向导的针介入手术机器人;在磁共振图像向导功能测试中,开发的手术针介入系统实现了精确定位。
关键词:磁共振图像;手术机器人;超声波电机;力反馈系统;实验设计
磁共振成像(magnetic resonance imaging,MRI)技术是20世纪80年代应用于临床的影像诊断新技术,可以多方位、多平面、多参数成像,具有优良的软组织分辨力和精确的几何特性,且没有射线危害[1-2]。手术机器人技术以其高精度和重复性好的特点,在医疗行业具有重要的研究价值[3-4]。MRI结合机器人技术作为手术向导成为国内外研究的热点之一,多个研究单位取得重要成果并提出开发手术设备的关键因素[5-6]。传统MRI向导手术中,医生需要反复将病人送入MRI设备中进行精确定位,这样不仅浪费时间、提高成本,而且会对病人的心理产生一定影响。如果可以设计基于MR图像向导的手术机器人在一次进入MRI扫描仪过程中完成定位,将大幅缩短时间、节约成本。
Fischer等[7]针对闭式高场强的磁共振成像设备设计了1台MRI兼容机器人操作臂机构,可在受限空间内进行前列腺的活检和粒子植入操作。Li等[8]设计了MRI环境下的主动脉瓣置换手术辅助机器人系统,测试表明负载环境导致MRI兼容性降低8.2%。Kokes等[9]设计了1台用于射频消融治疗的MRI兼容的扎针机器人系统,可按系统驱动要求的速度和位置推动射频针扎入组织,但难以用于较为复杂的手术。综合分析国内外MRI向导的针介入手术机器人或设备的研究现状可知,有待进一步解决满足MRI兼容性和安全性有关问题,尤其是执行机构和手术过程力反馈系统的MRI兼容性问题。
MRI兼容性是任何一种在磁共振环境下使用的设备必须满足的重要条件之一,它限制了包括机器人在内的医疗设备在磁共振环境下的使用[10]。目前MRI向导的手术机器人主要采用液压或气压执行机构,但在封闭式MRI扫描仪内工作时受有限空间的限制,且存在漏油和漏气问题。采用机器人完成手术操作,为确保手术安全研究手术力反馈系统可以建立手术对象和机器人的虚拟接触,为医生实时监控手术力提供可能。MRI兼容的力传感器是构建MRI向导手术机器人力反馈系统的核心,因其重要的应用价值已取得初步研究成果,但测量范围非常小且尚未达到商业化应用阶段。本文的主要目标是针对上述问题,构建满足MRI兼容性要求的针介入手术机器人系统,并完成图像向导功能测试。
1系统设计
1.1模型设计
测试平台是简化的针介入手术机器人系统模型,主要目标是:①测试超声波电机在MRI环境下的驱动能力和MRI兼容性;②提供力反馈系统的安装和测试环境;③验证本文搭建的针介入手术系统的MRI向导与定位功能。
本文所设计的MRI向导的针介入手术系统工作原理如图1所示,主要包括高磁场区域、低磁场区域和操作室(无磁区域)3个部分。其中力传感器和执行机构置于高磁场区域,因此研究两者的MRI兼容性是设计针介入手术系统的关键。

图1 MRI向导的针介入手术系统工作原理
工程塑料、钛合金、铜合金、陶瓷、铝合金和奥氏体不锈钢等材料的MRI兼容性较好,可用于构建机器人系统主体结构。考虑到材料加工性能和机械属性等因素,针对所设计测试平台应用要求,主要结构选用工程塑料,支撑端和连接件选择铜合金和奥氏体不锈钢加工,其中执行机构选择超声波电机(PUMR60,South Korea),传感器选择Flexiforce薄膜传感器(Tekscan,US)。
外置设备在MRI环境中所处的位置对MR图像有一定的影响,为确定外置设备在MRI环境中的合理位置,进行以下理论分析。当纵向梯度Gz与横向梯度Gx和Gy被同步激励时,梯度截项随之产生。MRI扫描仪系统自身的不足和外部干扰会导致磁场扭曲,分析表明整体的扭曲场包括静态/动态两部分。简化的Biot-Savart模型显示,感应磁场沿扫描仪轴向方向的强度B0反比于线圈中心到外部点之间的距离,公式描述如下
(1)
基于一组对应的位置和磁感应强度数据,可以通过最小化均方差的方法计算系数k。在成像区域以外,由图2可知,边界点指扫描仪口径边界位置,磁感应强度随距离的增加迅速减小;当距离大于3m时,磁感应强度低于0.1T。因此,为避免磁共振扫描仪的强磁场与外置设备的相互干扰,将控制器、数据采集系统和操作系统放置于3m以外的位置。

图2 磁感应强度随距离的变化趋势
1.2力反馈系统设计
在手术过程中,尤其在机器人辅助的手术中,测量手术过程力并构建力反馈系统有以下重要性:
1)降低手术并发症的危险,与传统切口手术相比,在没有力反馈系统或者力反馈有误的机器人手术会增加手术并发症的危险;
2)避免对组织施加过度力,在缺少力反馈系统或者力反馈系统有误的手术中,有可能施加超过组织承受范围的力,导致医疗事故;
3)有助于降低手术时间,因组织材料的不均匀性,手术工具与组织的接触时间有所差异,但接触时间过长会导致严重的创伤、病人不适、手术费用增加等问题。
Flexiforce传感器是一种耐用、压阻式、超薄型力传感器,具有灵活性好、适用范围广、传感区域可调等特点,尤其是无铁磁性材料封装的特点适合于MRI环境。选择大容量的电阻以满足动态的大范围输出电压,数据采集选用NIDAQ(USB6008)采集卡,以实时曲线显示。采取以下去噪和防干扰措施:传感器电路板由金属盒封装以屏蔽射频噪声,屏蔽线与封装盒之间采用连接插头以防止干扰传递,金属盒连接到MRI扫描室的接地板以降低噪声传递,采用D-Sub连接头连接传感器输出和数据采集板以起到滤波器的作用。
1.3MR图像质量评估方法
在未屏蔽的磁场中梯度线圈产生的磁通量会暴露在周围的金属材料之中。在梯度电流脉冲的上升沿和下降沿,由于梯度电流的快速切换,会在瞬间产生较大的磁通变化,在周围的材料中产生较高的感应电动势[11]。线圈周围的金属材料,包括金属板、匀场线圈、RF线圈和梯度线圈等,电导率都比较高。感应电动势和感应电流分别为
(2)
(3)
式中,φ为磁通量;σ为电导率;B(A)为通过区域A的磁感应强度。
当金属材料移动时感应涡电流为
(4)
感应涡电流会产生局部磁场来抵消磁通φ的变化,则实际梯度磁场为
(5)
式中,i(t)为线圈电流;ai(t)为代表电流产生的磁场;ik(t)为流过第k个涡电流环中的电流;akik(t)为代表ik(t)所产生的磁场。
涡电流用L-R回路表示,在不考虑涡电流环之间的互感时,根据基尔霍夫电压定律则有
(6)
对(5)式进行拉氏变换,可得
(7)
将所有的涡电流叠加,可得
(8)

若给线圈注入一个单位阶跃电流,磁场的拉氏变换为
(9)
对(9)式做反拉氏变换,时域磁场表达式为
(10)
由(10)式可知,涡电流是随时间衰减的电流,它所产生的磁场对原磁场有反作用,使磁共振信号产生相位离散,导致选择激发误差,不能使回波相位重聚,在谱和像中表现为信号的缺失或扭曲。
为了定量计算RSN,定义如下[1]
(11)
式中,Pc为水膜中心40×40区域内像素信号的平均值,Sc为背景信号40×40区域信号的标准误差。
实践证明,在(11)式中SDcorner值受背景图像区域选择影响严重,为了降低该影响,在图像信号4个顶点选取面积相同的4个区域,并计算其平均标准误差(MSD),得到
(12)
在每次图像扫描时,MR成像设备处理数据并输出图像,然后由操作人员或医学人员检查图像是否受到影响。本文采取如下5个步骤检验外置设备的MRI兼容性。
1) 对照实验
在设备放入MRI扫描室之前,将标准水膜放置于指定位置并扫描图像,作为整个测试实验的基准。
2) 断开连接
如果检测有图像质量下降,则说明引入的设备本身存在材料磁化现象或有涡电流产生。
3) 连接但不通电
如果检测有图像质量下降,则说明系统接线将干扰或噪声传递到MRI扫描区域并影响图像质量。
4) 通电但不运转
如果检测有图像质量下降,则说明设备通电影响图像质量。
5) 驱动设备
如果发现有图像质量下降,则说明设备驱动影响图像质量。在该步骤中,如果有电机操作,则应分别完成电机在正转和反转2种状态下的MR图像扫描,进一步研究电机正/反转对MR图像的影响。
2MRI兼容性分析
2.1力反馈系统MRI兼容性
为验证本文提出的基于Flexiforce传感器设计力反馈系统方法的可行性,在测试整体针介入手术系统MRI兼容性之前完成力反馈系统MRI兼容性测试,获取部分MRI测试图像如图3所示。采用文献[10]的方法计算图3所示图像信噪比,得到信噪比值在94~103之间,无噪声和伪影出现,结果完全满足医学诊断要求。

图3 Flexiforce传感器的MRI兼容性测试图像
2.2针介入手术系统MRI兼容性
根据1.3节兼容性测试分析步骤,分别完成针介入手术系统在每个状态的MR图像扫描(见图4)并计算SNR,结果如表1所示。由各个状态SNR值可知,引入测试平台使SNR降低约3%,此现象是由测试平台材料引起的,因为测试平台选用少量金属材料,且超声波电机封装材料含有一定的金属材料,有可能对磁场有轻微的影响;从状态图4b)到状态
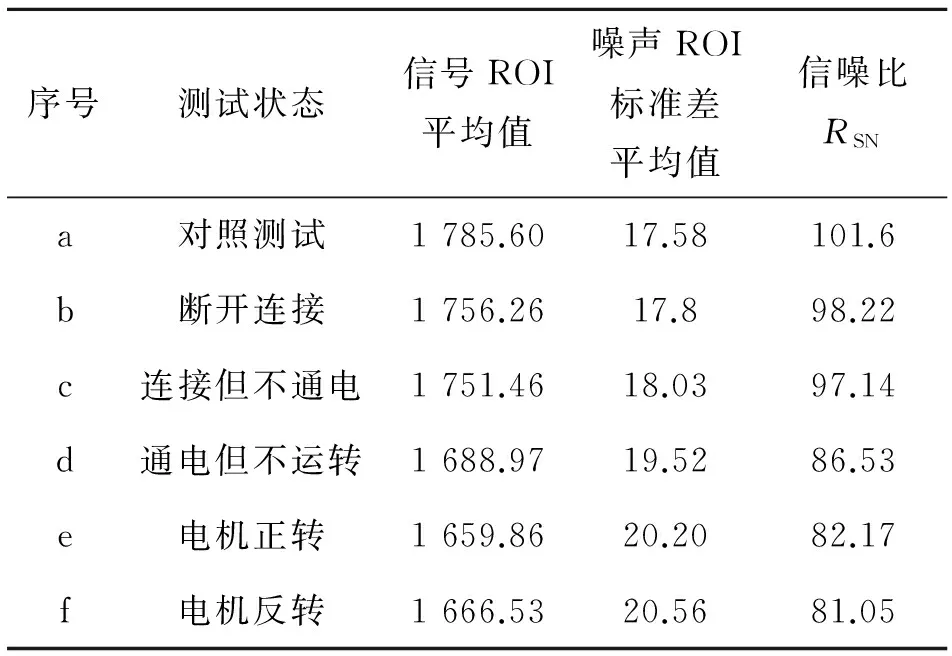
表1 测试平台MRI兼容性测试结果
图4c),RSN值从98.22变为97.14,即连接但不通电状态对MR图像没有影响;从状态图4c)到状态图4d),RSN值从97.14降低至86.53,即系统通电对MR图像有影响,该影响主要来自通电后产生的涡电流;状态图4d)、图4e)和图4f)的RSN值非常接近,即超声波电机正反转对MR图像质量无影响。另外,超声波电机正反转工作正常,编码器工作正常,即测试系统不受MRI扫描仪影响。从医学诊断的角度分析上述测试图像,每个测试状态得到16~30个不等的测试图像,在个别图层中有小区域伪影出现,但整体上不影响医学诊断,即认为所设计测试平台基本满足MRI兼容性设计要求,但有负载工作会导致超声波电机MRI兼容性轻微降低。在进一步研究中,减少铝合金或铜合金材料的使用,可以提高信噪比。

图4 测试平台的MRI兼容性测试图像
3图像向导定位测试
研究针介入手术系统的目的是在MR图像向导下实现精确定位,本文采取如图5所示的技术路线完成定位测试,具体描述如下:
1) 选择测试对象(此处为硅胶)并将其固定,标记目标点;
2) 将固定好的测试对象与测试平台一起放入MRI扫描仪内部;
3) 测试对象对焦并设置扫描参数;
4) 图像扫描开始后观察实时图像;
5) 根据观察到的实时图像判断测试平台是否定位准确,如果运动轨迹沿着规划路径介入测试对象,则继续介入直至达到预定介入深度;如果运动发生偏移,则重新定位;
6) 通过实时图像追踪到的手术工具的位置可以判断是否达到预定介入深度,当达到预定介入深度时停止测试。

图5 测试平台图像向导/定位测试技术路线
测试平台的MR图像向导功能和定位精度测试在Philips 3.0 环境中完成。金属材料可能导致周围区域不同程度的伪影,为避免上述问题导致定位异常,选择塑料材料加工针状体作为测试工具,其直径为3 mm、长度为150 mm。选择该加工长度的原因是尽可能保持目标点与执行机构之间足够大的距离,因为根据图2的分析,增加距离可以大幅度降低磁感应强度,进而降低对图像的影响。在图6a)中,标记目标点如图中箭头所指位置,测试平台驱动测试工具向目标点运动,通过观察针尖与目标点的距离判断定位精度。定位测试结果如图6b)所示,测试工具在MR图像的引导下到达预定的目标点,超声波电机在MRI环境下的可控性能没有受影响,验证了MR图像可以作为针介入手术向导方法的设
想,同时验证了超声波电机作为一种新的驱动方式可以用于MR图像向导的针介入手术机器人。
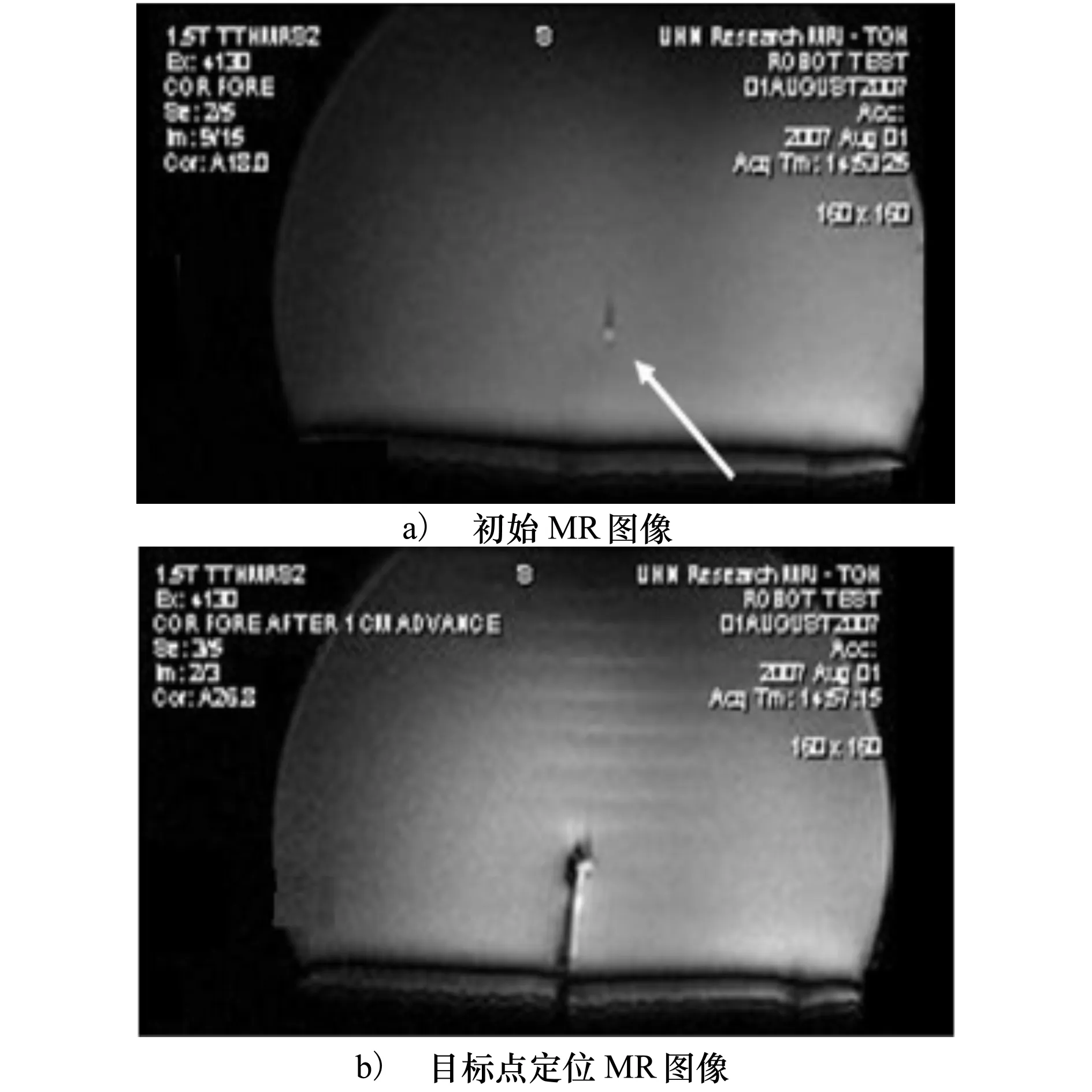
图6 MR图像向导的定位功能测试
4结论
本文设计了一种MRI向导的手术针介入系统,对磁共振图像质量的评估方法和影响因素进行了理论分析,并依据该方法设计了通用、简单且满足MRI兼容性要求的力反馈系统。实验结果表明,该系统的MRI兼容性良好,控制系统和数据采集系统工作正常,即不受MRI环境影响;所提出的基于超声波电机和Flexiforce传感器构建MRI向导的针介入手术机器人方法是可行的;验证了所设计的可以实现MRI向导定位功能。未来的工作主要包括扩展针介入手术系统模型的自由度,实现任意角度和距离的定位,使其达到临床应用水平。
参考文献:
[1]Wang Wendong, Shi Yikai, Yuan Xiaoqing et al. Compatibility of US Motors for Development of MRI-Guided Surgical Robot[C]∥2013 6th International Conference on Biomedical Engineering and Informatics, Hangzhou China, 2013: 388-392
[2]Wang W D, Zhang P, Shi Y K, et al. Design and Compatibility Evaluation of Magnetic Resonance Imaging-Guided Needle Insertion System[J]. Journal of Medical Imaging and Health Informatics, 2015, 5(8):1963-1967
[3]Tokuda J, Song S E, Fischer G S, et al. Preclinical Evaluation of an MRI-Compatible Pneumatic Robot for Angulated Needle Placement in Transperineal Prostate Interventions[J]. Int J Comput Assist Radiol Surg 2012, 7(6): 949-957
[4]Krieger A, Song S E, Cho N B, et al. Development and Evaluation of an Actuated MRI——Compatible Robotic System for MRI-Guided Prostate Intervention[J]. IEEE-ASME Trans on Mechatronics 2013, 18(1):273-284
[5]Ho M Y, McMillan A B, Simard J M, et al. Toward a Meso-Scale Sma-Actuated MRI-Compatible Neurosurgical Robot[J]. IEEE Trans on Robotics, 2012, 28(1): 213-222
[6]Wang W D, Shi Y K, Goldenberg A A, et al. Experimental Analysis of Robot-Assisted Needle Insertion into Porcine Liver[J]. Biomed Mater Eng, 2015, 26(Suppl 1): 375-380
[7]Fischer G S, Iordachita I, Csoma C, et al. MRI-Compatible Pneumatic Robot for Transperineal Prostate Needle Placement[J]. IEEE-ASME Trans on Mechatronics, 2008, 13(3): 295-305
[8]Li M, Kapoor A, Mazilu D, et al. Pneumatic Actuated Robotic Assistant System for Aortic Valve Replacement under Mri Guidance[J]. IEEE Trans on Biomedical Engineering, 2011, 58(2): 443-451
[9]Kokes R, Lister K, Gullapalli R, et al. Towards a Teleoperated Needle Driver Robot with Haptic Feedback for Rfa of Breast Tumors under Continuous MRI[J]. Medical Image Analysis, 2009, 13(3): 445-455
[10] 王文东,史仪凯,袁小庆,等. 手术机器人中超声波电机磁共振兼容性研究[J]. 西北工业大学学报, 2014, 32(01): 147-151
Wang Wendong, Shi Yikai, Yuan Xiaoqing, et al. Design and Analysis of Magnetic Resonance Compatibility of Ultrasonic Motor in Surgical Robot[J]. Journal of Northwestern Polytechnical University, 2014, 32(1): 147-151 (in Chinese)
[11] 张鹏,史仪凯,王文东,等. 涡流场对MR兼容性影响建模与分析[J]. 西北工业大学学报, 2015, 33(3): 451-455
Zhang Peng, Shi Yikai, Wang Wendong, et al. Modeling and Analysis of Eddy Current on MR Compatibility[J]. Journal of Northwestern Polytechnical University, 2015, 33(3): 451-455 (in Chinese)
收稿日期:2015-10-22
基金项目:中央高校基本科研业务费专项资金(3102015JCS05010)与国家自然科学基金(51105316)资助
作者简介:王文东(1984—),西北工业大学讲师,主要从事图像向导与医疗机器人研究。
中图分类号:TP24
文献标志码:A
文章编号:1000-2758(2016)03-0508-06
Design and Experiement of MRI-Guided Needle Insertion Surgical Robot
Wang Wendong1, Zou Yingjie1, Shi Yikai1, Ban Chao2, Yuan Xiaoqing1
1.School of Mechanical Engineering, Northwestern Polytechnical University, Xi′an 710072, China 2.Equipment Engineering College, Engineering University of CAPF, Xi′an 710086, China
Abstract:Magnetic Resonance Imaging (MRI)-compatibility and force feedback are critical for developing image-guided needle insertion surgical robot. Due to the limitation of MRI-compatible commercial force sensor, a general and easy assembly force feedback system was proposed to provide solution for needle insertion surgeries. By designing a universal mounting device of Flexiforce sensor, the calculation and MRI-compatibility test were performed in MRI room. A preliminary MRI-guided needle insertion surgical robot which was driven by Ultrasonic motor was esigned with non-ferromagnetic materials. In this paper, the MRI-compatibility test and image guide test of the presented robot were performed in 3.0T MRI scanner. The results show the force feedback system is completely MRI-compatible. Meanwhile, the presented robot successfully reached to the designed target under the guide of MR images in guide test.
Keywords:magnetic resonance imaging; surgical robot; ultrasonic motor; force feedback system; design of experiment
猜你喜欢
幼儿画刊(2021年12期)2021-12-16 08:16:28
幼儿画刊(2021年11期)2021-11-05 08:26:02
幼儿画刊(2021年10期)2021-10-20 01:44:40
幼儿画刊(2021年9期)2021-09-20 11:35:42
幼儿画刊(2021年8期)2021-08-04 06:54:14
幼儿画刊(2020年2期)2020-04-02 01:26:22
幼儿画刊(2019年11期)2019-04-14 00:41:22
幼儿画刊(2019年2期)2019-04-08 00:53:30
幼儿画刊(2019年12期)2019-04-07 07:29:26
幼儿画刊(2019年8期)2019-01-11 08:06:59