近景摄影测量在地下三维重建中的应用
2016-07-20 09:29:20白洪伟吴满意
沈阳大学学报(自然科学版) 2016年3期
白洪伟, 李 进, 穆 星, 吴满意
(1. 宿州学院 安徽省煤矿勘探工程技术研究中心, 安徽 宿州 234000;2. 国家测绘地理信息局第一地形测量队, 陕西 西安 710054)
近景摄影测量在地下三维重建中的应用
白洪伟1, 李进1, 穆星1, 吴满意2
(1. 宿州学院 安徽省煤矿勘探工程技术研究中心, 安徽 宿州234000;2. 国家测绘地理信息局第一地形测量队, 陕西 西安710054)
摘要:针对近景摄影测量技术在一般的地表建筑物测量中运用较多,但在地下建筑物的重建中应用较少的状况,认为其原因是地下建筑物的拍摄难度相对较大.根据相关的摄影测量知识,利用数码相机、全站仪相结合的方法对地下停车场的三维建模进行研究,并取得了阶段性成果,为今后近景摄像测量技术在地下通道三维重建的研究和应用打下良好的基础.
关键词:近景摄影测量; 三维建模; 应用研究; 地下停车场
近些年来,随着计算机技术的飞速发展和广泛应用、数字图像处理技术的不断提高、摄影测量内外业新仪器的问世、摄影材质的改善,数字摄影测量的精度和应用领域都有了较大的提高.摄影测量按照研究对象可分为地形摄影测量和非地形摄影测量,数字近景摄影测量属于非地形摄影测量,它是摄影测量与遥感学科的一个重要分支,其目的是通过摄影测量的方法,研究目标物体的外形、尺寸以及运动状态等.
近景摄影测量也叫做CRP技术,是运用摄影和图像处理的手段来获取目标各种形态的一门技术.根据摄影距离的大小可以将摄影测量划分为很多种类,小于100m的叫做近景摄影测量[1-3].现如今,近景摄影测量已经广泛地应用于各种领域,用户可以根据不同的需求和实际情况来选择近景摄影测量系统.
在我国,近景摄影测量技术近些年来发展迅速.国内一些学者进行了一系列重点研究,包括如何将普通的数码相机与全站仪相结合从而建立一个全新的系统,以及利用相关的测量技术建立监测系统[4-6].
1基于数字近景摄影测量三维模型建立
数字近景摄影测量三维空间模型的建立,即利用非量测数码相机对研究对象进行影像获取,通过数码相机的检校、影像数据预处理、影像同名特征提取及匹配、数据编辑、真实纹理粘贴等步骤,建立可量测的三维立体模型的过程.
1.1共线以及共面方程式
将同一条直线上物点和像点的中心投影变换方程,即:
(1)
式中,ai,bi,ci(i=1,2,3)是由三个外方位角元素所生成的3×3正交旋转矩阵R的一个元素,x、y为以像主点为原点的像点坐标,及相应地面点坐标X、Y,像片主距f,外方位线元素Xs、Ys、Zs。
经简化得:
(2)
误差方程:
(3)
运用空间后方交会,根据三个已知点的坐标和像点坐标,经过一系列的计算可以得出像片的六个外方位元素。同样,可以运用空间前方交会的方法,根据内、外方位元素计算得出相关地面点的空间坐标。
共面方程式可以用向量表示为:
(4)
误差方程式为:

(5)
其中:v是将像点的坐标消除误差后得到的矩阵;Δ是相对定向过程的待定参数(Δω,Δφ,Δκ,by,bz)矩阵。
1.2非量测数码相机检校
在影像重建三维立体模型的过程中,数码相机检校是其必不可少的环节。通过相机检校可确定三维物方空间坐标系与相机二维图像坐标系之间的变换关系,即给出非量测数码相机的内方位元素及其镜头畸变( 径向、切向) 的模型参数。
对于相机检校,摄影测量与计算机视觉进行了广泛的研究,其中比较有代表性的为平面模板相机检校法,即利用旋转矩阵的正交条件及非线性最优化进行相机的检校。该方法要求相机在两个以上不同方位拍摄一个平面模板的图像,它具有简单方便、成本低、稳定性好的特点[7]。
1.3地下停车场三维模型的建立
1.3.1地下停车场的特点
伴随着城市交通的发展,大量的地下停车场应需而建.它们具有以下特点:
(1) 大多数光线较为昏暗,测量工作需要特殊的照明设施;
(2) 车辆众多,来往密集,不利于仪器的架设,观测条件不容乐观;
(3) 提高了城市用地利用效率,能够分担车辆的拥堵;
(4) 受场地限制,实际的施工作业面较小,不能动用大型机械.
1.3.2AutoCAD软件建模
CAD又称作计算机辅助设计,最早出现在1960年.CAD软件在绘图方面应用广泛,它能有效地处理三维绘图过程中所遇到的很多问题.AutoCAD在三维建模中应用广泛,有以下两种技术:
(1) 线框与表面描述建模技术.该技术中,必须先建立一个目标的大概框架,然后在目标体的表面建立立体模型.该项技术在建模过程中表现直观,但操作步骤繁琐.
(2) 实心体造型建模技术.是通过对目标的求合、切割、求交等一系列的解算步骤来构建模型.该种建模技术步骤较为简捷,但建模过程中涉及的数据非常多,对计算机硬件设施要求较高.
综上所述,在建模过程中,应该就实际情况选取较为简单且效率相对较高的技术.AutoCAD软件具有很强的图形处理能力,但是它在三维图形处理方面不能达到足够的精度要求.这种情况下,可以用Auto LISP对其进行弥补,不但提高了建模的精度,也提高了建模的效率.
1.3.3建模流程及结果
目前,有许多近景摄影测量系统可根据不同用途和实际情况供用户选择.近景摄影测量系统都包含数据获取、数据处理、成果输出的软件和设备.最简单的数据获取设备可以是一台数码照相机,用于获取物体影像数据.
在三维建模过程中,结合摄影测量相关知识,可以从两张或多张重叠的像片中找出同名点,并提取其测量数据,其主要流程见图1.
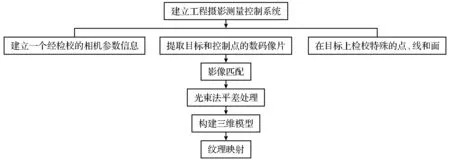
图1 三维建模的主要流程
(1) 特征提取与影像匹配.文章实验选取楼道拍摄的像片进行特征提取和影像匹配,如图2所示.

图2 特征提取过程
(2) 相对控制.在相对定向的过程中,可以确定像片相对位置,从而建立一个与地面相类似的模型.上述过程可以经过一系列的计算得出每个模型点坐标,然而必须对已经建立的立体模型作三维的旋转、平移和缩放,才可以得知立体模型在空间坐标系中的具体位置以及大小、形态.由于摄影测量坐标系的位置具有不确定性和任意性,所以必须引入相关控制点,见表1和图3.
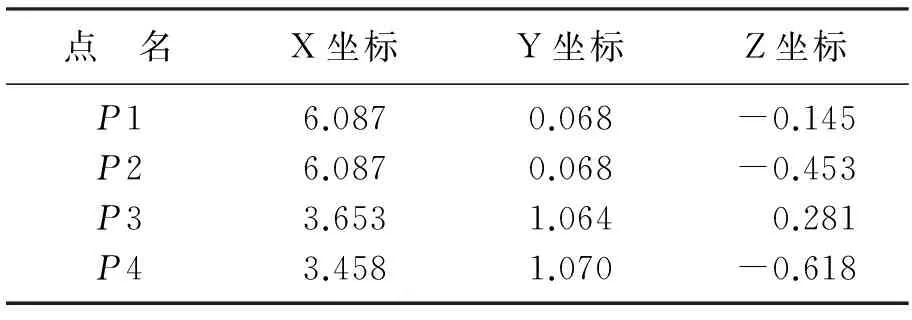
表1 四个已知点的坐标
(3) 建模成果.从实际拍摄的众多像片中选取5幅影像,并从中获取一组楼道影像,对其进行一系列的操作,包括特征点的提取、影像匹配、平差及相对控制,此后得到如图4所示的建模成果.

图3 相对控制的已知点
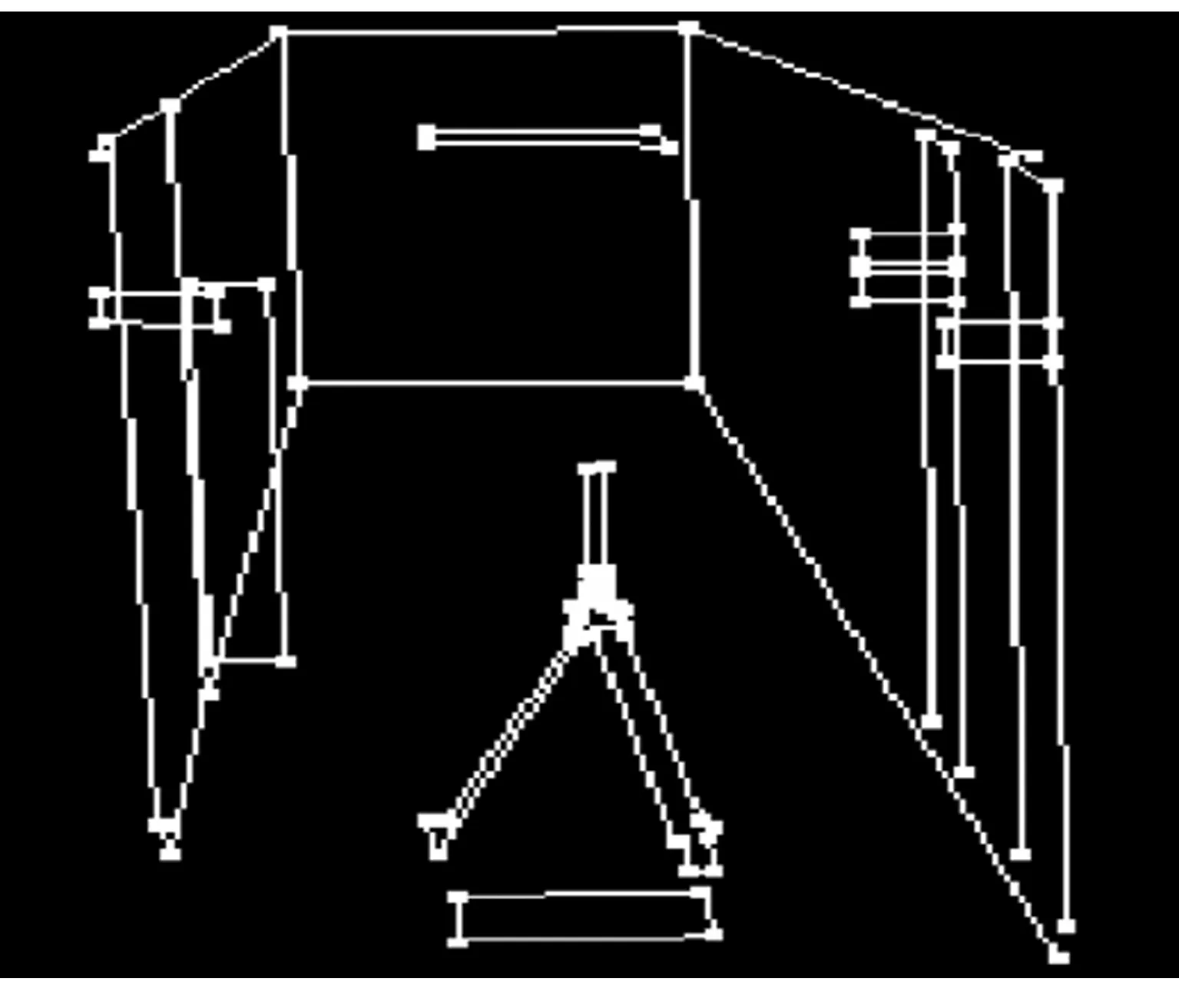
图4 三维立体模型
1.3.4测量精度评定
对已经建好的楼道三维模型,输入控制点的坐标定向后,可以测量计算出其长、宽、高、面积、体积等信息.
为了使实验结果达到相应的精度要求,需要对测量的结果进行精度评定.通过全站仪测定的已知点坐标计算出线段的长度,并将其与三维模型上量取的长度进行比较.全站仪的观测和特征点的位置提取的精确程度在很大程度上影响三维模型量取的线段精度.测量结果与实际测量结果对比如表2所示.
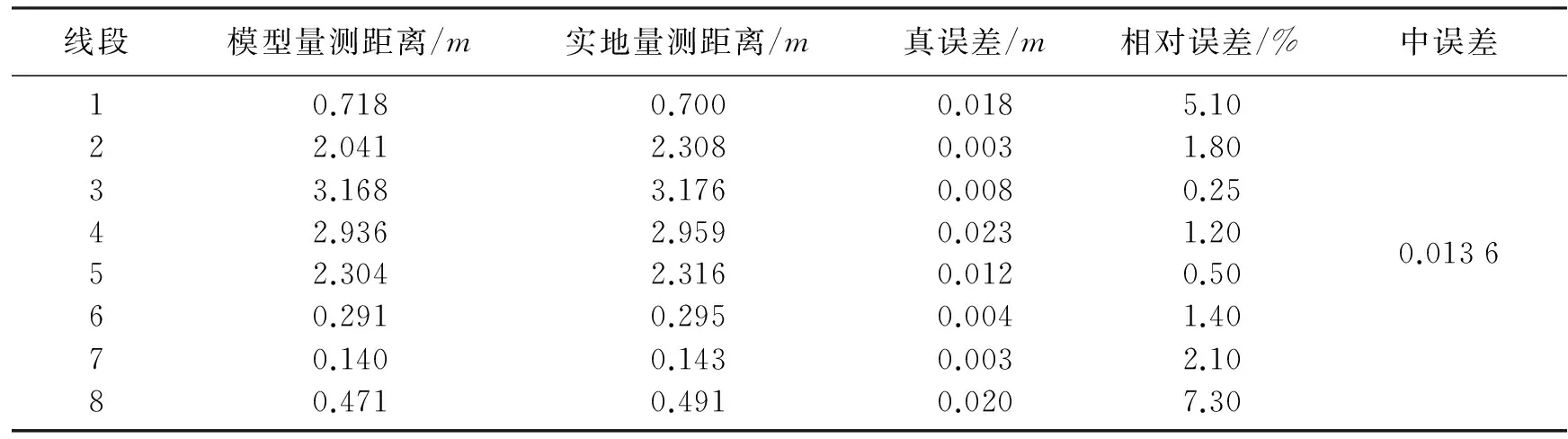
表2 测量结果与实际结果对比表
2三维建模实验分析
(1) 相机的检校过程决定着整个实验结果的精度,所以相机的检校过程称为实验中的一项重点.在平面上拍摄网络模块的时候,要保证其所有边缘角落的顶点都在相机的拍摄范围内.
(2) 不同相机的参数各不相同,即使是同一类型的相机也有差别.在实验过程中,要保证检校时的相机和实验拍摄影像时的相机相同,且为了减小相机所带来的误差,提高实验过程的准确性,实验过程中不能改变其焦距.
(3) 一般情况下,在特征提取过程中,为了保证接下来影像匹配的精度,每一幅影像上选出的特征点不得少于三个,所选取的特征点应该涵盖整个测量范围.
(4) 由于相机拍摄时容易收到外界光感的影响,在拍摄的过程中应调整好合理的角度,这样能够尽量有效地减小建模时的误差.
(5) 对实验过程中建立的三维模型,发现平差前和平差后都不能有效进行纹理映射,通过不断验证发现这种问题具有随机性,经过分析可能存在的原因有以下几种:①在相机的检校过程中,由于外界条件的干扰,使得检校的相机存在较大的误差,从而导致拍摄的像片存在偏差.②对楼道进行拍摄时,选取的拍摄角度不够合理,受外界光感因素影响,后续的建模也产生较大偏差.③特征点提取时过于局限,选取的点的位置不具有代表性.
3结论
为了确保建模成果的精度,进行了简单的数据精度评定.由于实验过程中的测量数据中误差控制在0.015 m以下,所以可以认为该项实验具有一定的可行性.
出于对停车场复杂环境条件的考虑,如光线昏暗、车辆众多,遵循实验由简单到复杂的原则,本文是从一个较为简单的实验出发.所以要建立复杂的地下停车场三维模型,需要进一步的努力和研究.目前,由于地下建筑物的三维重建必须在其内部进行,使得摄影测量过程中容易产生较大的误差.而地下建筑物存在一定的客观约束条件,所以数字近景摄影测量技术在地下建筑物的重建中应用较少.如何有效地减小这种误差,值得进一步去研究.
参考文献:
[1] 闾海庆. 基于非量测数码相机的近景摄影测量数据处理方法研究[D]. 长沙:中南大学, 2006.
(LYU H Q. Close range photogrammetry data processing method based on non metric digital camera[D]. ChangSha:Central South University, 2006.)
[2] 邹广玉. 线性过程矩收敛精确渐近性的一个结果[J]. 沈阳大学学报(自然科学版), 2014,26(6):498-500.
(ZOU G Y. A result on precise asymptotics for moment convergence of linear process[J]. Journal of Shenyang University(Natural Science), 2014,26(6):498-500.)
[3] 刘志铭,方勇,张建慧,等. 非量测数码相机在砼管片变形检测中的应用[J]. 测绘通报, 2001(6):40-41.
(LIU Z M, FANG Y, ZHANG J H, et al. The application of non-metrie digital camera in segment deformation measurement[J]. Bulletin of Surveying and Mapping, 2001(6):40-41.)
[4] 李广云. 非正交系坐标测量系统原理及进展[J]. 测绘信息与工程, 2003,28(1):4-10.
(LI G Y. Principle and developing trend of non-orthogonal coordinate systems[J]. Journal of Geomatics, 2003,28(1):4-10.)
[5] 张剑清,潘励,王树根. 摄影测量学[M]. 武汉:武汉大学出版社, 2003.
(ZHANG J Q, PAN L, WANG S G. Photogrammetry[M].Wuhan: Wuhan University Press, 2003.)
[6] 姜楠. 摄影测量计算机视觉在工业测量中的关键技术[D]. 西安:西安科技大学, 2008.
(JIANG N. Key methods of industrial hardware measuring using photogrammtry and computer vision[D].Xi’an: Xi’an University of Science and Technology, 2008.)
[7] 李德仁,王树根,周月琴. 摄影测量与遥感概论[M]. 北京:测绘出版社, 2008.
(LI D R, WANG S G, ZHOU Y Q. Survey and remote sensing introduction[M]. Beijing: Surveying and Mapping Press, 2008)
【责任编辑: 祝颖】
Application of Close Range Photogrammetry in Underground 3D reconstruction
BaiHongwei1,LiJing1,MuXing1,WuManyi2
(1. hui Province Coal Mine Exploration Engineering Technology Research Center, Suzhou University, Suzhou 234000, China; 2. The First Topographic Surveying Brigade of SBSM, Xi`an 710054, China)
Abstract:Close range photography measurement technology is used mostly in general surface measurement of buildings, but seldom used in the reconstruction of underground buildings. That is because the underground building is relatively difficult to shoot. Based on the relevant knowledge of photogrammetry, a simple research is made on the 3D modeling of the underground parking lot by using digital camera and total station; and initial results are achieved.
Key words:close range photogrammetry; 3D modeling; application research; underground parking lot
文章编号:2095-5456(2016)03-0223-04
收稿日期:2015-11-06
基金项目:卫星测绘技术与应用国家测绘地理信息局重点实验室经费资助项目(KLSMTA-201304); 资源三号影像全色与多光谱影像融合方法比较研究(KLSMTA-201304); 宿州学院安徽省煤矿勘探工程技术研究中心开放课题资助(2013YKF04); 宿州学院教研项目(szxyjyxm201419); 安徽省大学生创新创业训练计划项目(AH201510379046,AH201510379084).
作者简介:白洪伟(1987-),男,安徽宿州人,宿州学院助教,硕士.
中图分类号:P 234.1
文献标志码:A
猜你喜欢
科学(2022年4期)2022-10-25 02:43:50
中国特种设备安全(2021年5期)2021-11-06 05:09:28
青年文学家(2021年1期)2021-03-24 21:12:54
科学大众(2020年23期)2021-01-18 03:09:14
测绘通报(2019年4期)2019-05-10 08:16:20
小学阅读指南·低年级版(2017年12期)2017-12-26 16:36:35
传媒评论(2017年2期)2017-06-01 12:10:16
传媒评论(2017年2期)2017-06-01 12:10:16
测绘科学与工程(2017年5期)2017-05-07 06:30:45
航天器工程(2014年1期)2014-03-11 16:35:07