
四元Heisenberg群上的链和R-圆及其性质
2016-06-30 08:51施云
高校应用数学学报A辑 2016年1期
施云
(浙江大学数学科学学院,浙江杭州310027)
四元Heisenberg群上的链和R-圆及其性质
施云
(浙江大学数学科学学院,浙江杭州310027)
定义了四元双曲空间上的链和R-圆,并给出了链在垂直投影下的性质.证明了经过Heisenberg群上固定两点的链的唯一性,R-球的qc-水平性,并给出了R-圆与纯虚R-圆之间的关系.
四元双曲空间;四元Heisenberg群;链;R-圆
§1 引 言
近年来,四元切触几何有许多深入系统的研究和应用,参见[1-11]等.四元切触几何是多复变中CR几何的四元对应物.四元Heisenberg群和四元双曲空间是研究四元切触几何的最简单的模型.[9]中介绍了复双曲空间HnC的球模型和Siegel域模型,并给出了HnC上的链和R-圆的定义及其性质.在[12]中,Jacobowitz给出了链和R-圆的等价定义并用其他方法得出了类似的性质.本文介绍了四元双曲空间,四元Heisenberg群,Siegel域,并对四元Heisenberg群上的链和R-圆进行了一些研究. Cartan证明了与Von Staudt定理相类似的链保持定理(参见[9]p.136),在复的情况下,R-圆被应用于PU(n,1)的离散子群的研究(参见[9]p.149).我们期望四元情况下也有类似的链保持定理,R-圆也能被应用于PSp(n,1)的离散子群的研究.
§2回顾了四元双曲空间的基本定义,Heisenberg群H上的自同态(参见[13]p.81)以及四元Heisenberg群与Siegel域之间的关系(参见[6]p.145).§3引入了四元双曲空间上的链的定义,给出了有限链和垂直链在垂直投影下与Hn-1的关系,证明了经过Heisenberg群上两点的链的存在唯一性以及经过Heisenberg群上一点与垂直切空间上一点相切的链的存在唯一性.§4引入了四元双曲空间下的R-球和R-圆,定义了纯虚R-圆,证明了任何R-球均是qc-水平的子流形以及任何一个R-圆可以看成是由纯虚R-圆在Heisenberg作用下变换而得.
§2 预备知识
四元切触流形(M,g,Q)是由一个(4n - 1)-维流形(n≥2)M和一个余维数为三的分布H构成的,局部的,H可以表示成一个R3-值的1-形式Θ=(θ1,θ2,θ3)的核,称H为水平空间,g是其上的度量.进一步地,H有Sp(n)Sp(1)-结构,即其上配有秩为3的丛:

其中殆复结构I1,I2,I3是H上的自同态,局部的,满足四元交换律:

它们与度量Hermitian相容:

且对于任意的X,Y∈H,s = 1,2,3满足相容条件

记I :=(I1,I2,I3).
四元Heisenberg群H = Hn-1⊕R3上有乘法

其中,x =(x1,···,xn-1),y =(y1,···,yn-1),t =(t1,t2,t3),s =(s1,s2,s3),x¯y = x1¯y1+···+ xn-1¯yn-1,且它的原点是e =(0,0).对于任意的ξ=(x,t),定义它的模为

H上有如下自同态(参见[13]p.81):
(1)胀缩:

(2)左平移:

(3)旋转:

其中

(4)反射:

(5)Sp(1)的作用:

其中在第一个因子上的作用是左乘σ∈H且|σ| = 1,在第二个因子上的作用与SO(3)同构.
(6)共轭:

把(4)-(9)式中若干映射的复合称为Heisenberg作用.
令(M,g,Q)为一个四元流形,称它的一个k-维子流形S∈M为水平的,当且仅当它处处切于H,即对于任意的s∈S,它的切空间TsS∈Hs.
四元Heisenberg群H的乘法写成实变量的形式可以表示成

其中s = 1,2,3,y =(y1,y2,···,y4n-4),y′=(y′1,y′2,···,y′4n-4)∈R4n-4,t =(t1,t2,t3),t′= (t′1,t′2,t′3)∈R3(参见[8](2.15)).四元Heisnberg群H上的左不变向量场可以表示成
l = 0,···,n - 2,j = 1,···,4(参见[8](2.17)).
四元Heisenberg群的水平子空间HH:= span{Y1,···,Y4n-4}.
令Hn,1为一个(n + 1)-维四元线性空间,它包含
其中q′=(q1,···,qn)∈Hn,qn+1∈H.在Hn,1上定义内积

n-维四元射影空间P(Hn+1)是Hn+1中左四元直线的集合.精确的

其中~是等价关系:如果(p′1,···,p′n+1)~(q′1,···,q′n+1)∈Hn+1,则存在非零四元数λ使得

称向量Q∈Hn,1为负(零,正),当且仅当
P(Hn+1)在Sp(n,1)的诱导作用下,存在三个不变子空间
作为Sp(n,1)的齐性空间,D-等价于四元双曲空间HnH. HnH中的点的稳定子是Sp(n,1)的最大紧子群,记为Sp(n)×Sp(1)(参见[14]p.524). Sp(n,1)是保持<·,·>的(n + 1)×(n + 1)四元数矩阵. 在Hn上定义内积

Sp(n)保持≪·,·≫不变.
取q∈∂HnH,与其相应的零线由零向量Q∈Hn,1生成.存在唯一的与∂H相切于q的H-超平面H(q),与之相应的线性超平面是)上与H(q)互补且包含的仿射片是一个无界区域.可以把嵌入映射表示为,令Q为向量

对应于球模型的南极,其中0′=(0,···,0)∈Hn-1,因此H(˜p∞)由所有

表示的点组成,其中q =(q1,···,qn-1).
映射

是所需的仿射嵌入.
(1)球模型
可以把HnH和单位球

通过如下映射等同起来.令

为把Hn嵌入到P(Hn,1)的映射(在齐性坐标下qn+1/= 0).由于当qn+1= 0时,Hn,1中的向量是正的,故有HnH⊂A(Hn),且A把B4n和HnH,以及∂B4n= S4n-1⊂Hn和∂HnH等同起来.
(2)Siegel域模型
四元双曲空间HnH还可以等同于一个无界域,即Siegel域

通过Cayley变换:


等同起来(参见[6]p.145).
反射ι把原点映到∞,如果Dδ是原点处的一个涨缩,那么
令E为四元向量空间.如果数量乘法只考虑R∈H,则存在实向量空间ER,称为E下的实向量空间.定义ER上的关于I1,I2,I3不变,非退化的双线性形式

子空间S⊂ER称为全实的当且仅当S,I1S,I2S,I3S在((,))下垂直.
流形M的一个子流形N称为在x处是全测地的,如果对于任意的X∈TxN,M上由x和X定义的测地线也是N上的测地线.如果对于N上的所有点N都是全测地的,则称N为M的全测地子流形.如果N⊂M既是全实的又是M的全测地子流形,则称N为全实全测地子流形.
§3 链
四元Heisenberg群上的链起到的作用与Riemann几何上测地线起到的作用类似.与复的情况相类似,对于任意的x∈B4n,存在g∈Sp(n,1)把x映射到球心e,令F′⊂TeBn为过球心的一个k-维四元线性子空间,存在唯一的一个过球心且与F′相切的全测地子流形.记g(F′)= F.由于g是等距的,通过g-1可得唯一的包含x且与F相切的全测地子流形.把这种子流形叫作Hk-平面.把H1-平面叫作四元测地线. Hk-平面和∂HnH的交是的一个光滑嵌入,称为Hk-链.把H1-链就叫作链.
类似的,四元超平面和HnH的交是一个全测地四元超曲面,称为在HnH上的四元超平面,它的边界是光滑嵌入∂HnH中的(4n - 1)-维球,称为超链.
若(x,t)∈H,则把x = 0叫作垂直轴,记为V.经过∞的链可以表示成垂直投影
的纤维.把这样的链叫作垂直链.不经过∞的链叫作有限链.
如果C是四元线性子空间,那么存在唯一的一个稳定点集是C的反射,记作ιC.比如,保持垂直轴x = 0的反射就是通常的欧几里德反射(x,t)■→(-x,t),表示成对角矩阵

其中In-1是(n - 1)×(n - 1)单位矩阵.

其中反射在HnH的球模型和Siegel模型上分别为

和

令L⊂HnH为一个Hk-平面且它的边界∂L =¯L∩∂HnH是一个Hk-链.那么通过判断∞是否在∂L内,可以分成如下两种情况.如果∞∈∂L,称∂L是垂直的;如果∞/∈∂L,称∂L是有限的. 把L中的反射记为ιL.如果∂L是有限的则ιL(∞)∈H叫做∂L的中心,记为OL.
例3.1取Hk-平面L ={(0,···,0,ξn-k+1,···,ξn)∈Hn},则

为球B4n上的链,通过Cayley变换可以把它变换为Siegel域上的垂直链

特别的,取k = 1,n = 2时,得到链{(q1,q2)∈H2;Req2= 0},投影到H上为{(0,q2)}.
例3.2取Hk-平面L ={(ξ1,···,ξk,0,···,0)∈Hn},则

为球B4n上的链,通过Cayley变换可以把它变换为Siegel域上的有限链

通过§2中的映射(16),可以把如上有限链投影为Heisenberg群上的有限链

进一步地,垂直投影ΠV: H→Hn-1可以把∂L投影到Hn-1的一个实(4k - 1)-维球

定理3.1令∂L⊂∂HnH= H∪{∞}为一个Hk-链且ΠV: H→Hn-1为垂直投影.那么1.如果∂L是垂直的,则ΠV(∂L -{p∞})是Hn-1的一个(k - 1)-维H-仿射子空间且

p∞是Siegel域Σ中的无穷远点.
2.如果∂L是有限的,则ΠV是∂L到Hn-1的一个实(4k - 1)-维球的一个双射.
3.两个Hk-链的垂直投影之间相差一个垂直变换.
证1.由于p∞∈∂L,ιL在L中是一个保持p∞的变换,因此也保持与∂HnH相切于p∞处的四元超平面H(p∞).相应地,在Σ的仿射片上,ιL为仿射变换,它的稳定点集L-{p∞}是一个四元仿射空间.由于通过p∞的四元直线有界于垂直链,∂L是一些垂直链的集合,因此ΠV(∂L)是(k - 1)-维四元仿射子空间.
2.假设∂L是中心为OL的有限Hk-链.存在唯一的包含L的垂直Hk+1-链L+.由1,ΠV(∂L+)是Hn-1中的一个k-维仿射子空间.把Hn-1由ΠV(∂L+)代替,可以假设k = n - 1.
令τ为把OL映到V上的变换,则τ(L)是中心在V上的一个Hk-链.因此可以假设OL∈V. V是唯一的包含OL和∞的链,且ιL交换OL和∞.因此ιLV = V,即L和V是正交的.因此2成立.
3.证明与2类似.
当n = 2时,由定理3.1可以直接得到如下推论.
推论3.1链在H上的垂直投影为一个点或者一个圆.
推论3.2如果两个链的垂直投影相同,则他们之间只相差一个垂直变换.
如果c∈H是一个有限链,那么把ΠV(c)∈H的半径定义为链c的半径.
定理3.2 1.令p,q∈H,则存在唯一的链经过p,q.
2.令p∈H且ξ∈TpH - Hp是经过p点的切向量,那么存在唯一的链经过p且与ξ相切.
证1.存在唯一的P(Hn,1)中的投射直线经过p,q∈P(Hn,1).那么它的边界就是所求的链.
2.由于ξ是一个非零的切向量,存在唯一的经过p与ξ相切的投射直线.因为p∈H且ξ/∈Hp,故这条直线不与∂HnH⊂P(Hn,1)相切,那么它与∂HnH的交是所求的链.
令α⊂H2H为四元测地线{0}×H1H有界于垂直轴V∈H .记

进一步地,把投影Πα: H2H→α限制在H - V的边界上,这把双曲几何嵌入到Heisenberg几何中,即双曲平面对应于H - V中与V垂直的链.这些链覆盖H - V,且通过

把双曲度量变换到H - V上的度量.
V的稳定子是如下复合的像

嵌入Sp(1,1)■→Sp(2,1)为

其中D∈Sp(1,1). Sp(1,1)的中心是固定V的反射.在球模型中,正交投影Πα: H2H→α可以表示为Πα(q1,q2)=(0,q2).
§4 R-圆
链提供了很多Heisenberg群上的几何对象.另一方面,与链相类似,也可以考虑全实测地子空间的边界.
把Hk-平面定义中的全测地子流形用全实全测地子流形代替,可以得到Rk-平面的定义,即对于任意的x∈B4n,存在g∈Sp(n,1)把x映射到球心e,令F′⊂TeBn为过球心的一个k-维四元线性子空间,存在唯一的一个过球心且与F′相切的全实全测地子流形.记g(F′)= F.由于g是等距的,通过g-1可得唯一的包含x且与F相切的全实全测地子流形.把这种子流形叫作Rk-平面. 把Rk-平面的边界称作Rk-1-球. R1-球叫作R-圆.把HnH中的Rn-球叫作R-形式. Rk-1-球是光滑的实(k - 1)-维流形.
下面给出HHn上的R-球的一些性质(复双曲空间下相应的结论参见[9]§4,另一种研究复双曲空间下R-球的方法参见[12]§9).定义实球
回顾子流形S⊂∂HnH是qc-水平的定义,有
定理4.1 P∈HnH是一个Rk-平面,那么R-球∂P⊂∂HnH是qc-水平的子流形.
证令p∈∂P,标准的qc-水平空间可以定义为

只需要证明

通过适当的坐标变换,可以假设P = BkR×{0n-k}=(x1,···,xk,0,···,0),其中xj∈R且p =(1,0,···,0).那么Tp(∂H)= ImH×Hn-1,IkTp(∂HnH)= ImH×Hn-1,k = 1,2,3且Tp(∂P)={0}×Rk-1×{0},则

同理可证,I2Tp(∂P)⊂ImH×Hn-1和I3Tp(∂P)⊂ImH×Hn-1.命题成立.
与链类似,Heisenberg几何中的R-球分为有限R-球和无限R-球两种.如果R-球S包含∞则称S是无限R-球,如果不包含∞则称S是有限R-球.
例4.1取Rk-平面L ={(0,···,0,xn-k+1,···,xn)∈Rn},则

为实球B4nR上的R-球,通过Cayley变换可以把它变换为Siegel域上的垂直R-球

这是一个抛物面.
例4.2取Rk-平面L ={(x1,···,xk,0,···,0)∈Rn},则S =¯L∩∂BnR=(x1,···,xk,0,···,0)∈Rn;x21+···+ x2k= 1
为实球BnR上的R-球,通过Cayley变换可以把它变换为Siegel域上的有限R-球

通过§2中的映射(16),可以把如上有限R-球投影为Heisenberg群上的有限R-球
性质4.1令S⊂M为四元切触流形(M4n-1,g,Q)的一个水平子流形,那么有dimS<n.
证对于任意的s∈S,把dΘ限制到Hs上是一种反对称结构. Xs,Ys是切向量,把他们延拓为S上的光滑向量场,在这种结构下TsS∈Hs是迷向的.那么,因为Xs,Ys和[X,Y](s)∈TsS均属于Hs= Ker(Θ),则

由于TsS是迷向的,所以dimTsS≤14dimHs= n - 1.
例4.3与标准的全实子空间HR2⊂HH2对应的无限R-圆是实轴

任何一个H中的无限R-圆可以从R×{0}通过一个Heisenberg等距变换得到.
为了简便起见,本节的余下部分只考虑n = 2的情况,即只考虑实维数为7的Heisenberg群上的R-圆.有限R-圆R的中心由∞在反射ιR下的像定义(无限R-圆的中心定义为∞).有QB2R⊂B8,k = 1,2,3,其中Q由 §2中的(1)定义.
考虑一个以原点为中心且包含于QB2R⊂B8的R-圆.把这种R-圆叫作纯虚的R-圆,记为RQ.为了简便起见,只考虑以原点为中心,包含于I1B2R的R-圆,记为RI1.把(x,t)写成柱坐标的形式,为(x = a + bi + cj + dk = reˆnθ,t = t1i + t2j + t3k),其中

(参见[15]p.1646).
(x,t)∈H在Cayley变换下对应于球上的点

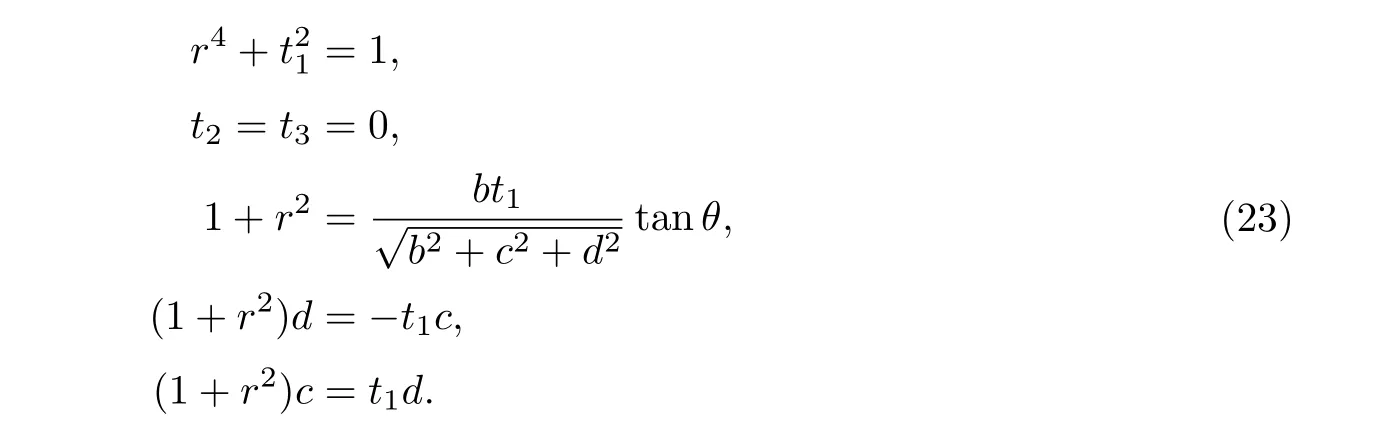
因此RI1在柱坐标下可以由如下方程决定:

即:
定理4.2任何一个R-圆可以看成是RQ在Heisenberg作用下的像.
证显然可以通过Heisenberg作用把RQ变换成RI1,因此只需要证明任何一个R-圆可以看成是RI1在Heisenberg作用下的像.考虑有限R-圆R⊂H,它的反射是ιR: H→H .可以通过Heisenberg作用把R的中心ιR(∞)变换到原点0∈H,因此不妨假设R的中心是0.反射ιR不改变包含0和∞=ιR(0)的链,即垂直轴V.把ιR限制到V上是一个反对和,它有两个固定点.由于ιR交换0和∞,如果ιR|V的固定点是(0,±r20i),其中r0>0.通过Heisenberg涨缩可以假设ιR固定(0,±i)∈V.
ιI1表示反射,由于(0,±i)∈RI1且ιI1(V)= V,则ιR◦ιI1保持V不变,且固定(0,0),(0,±i),∞.因此ιR◦ιI1固定V,令

有:
如果R是一个有限R-圆,存在唯一的Heisenberg变换T使得T(R)的中心是原点.那么存在一个Heisenberg变换
使得T(R)=δ(RI1).把四元数r2e2ˆnθ定义为R-圆R的半径.显然RI1的半径是1.
[1]Ivanov S,Vassilev D. Conformal quaternionic contact curvature and the local sphere theo
rem[J]. J Math Pures Appl,2010,93: 277-307.
[2]Ivanov S,Vassilev D. Quaternionic contact manifolds with a closed fundamental 4-form[J]. Bull London Math Soc,2010,42: 1021-1030.
[3]Ivanov S,Minchev I,Vassilev D. Quaternionic contact Einstein structures and the quaternionic contact Yamabe problem[A]. Rhode Island: Mem Amer Math Soc,2014,231.
[4]Ivanov S,Vassilev D. The Lichnerrowicz and Obata first eigenvalue theorems and the Obata uniqueness result in the Yamabe problem on CR and quaternionic contact manifolds[J]. Nonlinear Anal,2015,126: 262-323.
[5]Ivanov S,Minchev I,Vassilev D. Solution of the qc Yamabe equation on a 3-Sasakin manifold and the quaternionic Heisenberg group[J]. arXiv:1504.03142v1
[6]Ivanov S,Vassilev D. Extremals for the Sobolev Inequality and the quacternionic contact Yamabe Problem[A]. Imperial College Press Lecture Notes[C]. Hackensack: World Scientific,2011.
[7]Apanasov B,Kim I. Cartan angular invariant and deformations of rank 1 symmetric spaces[J]. Mathematics,2007,198(2): 147-169.
[8]Wang Wei. The Yamabe problem on quaternionic contact manifolds. Ann Mat Pura Appl,2007,186: 359-380.
[9]Goldman W. Complex hyperbolic geometry[A]. Oxford Mathematical Monographs[C]. New York: Clarendon Press/Oxford University Press,1999.
[10]Biquard O. Asymptotically symmetric Einstein metrics[J]. Ast´erisque,2000,265: 1-109.
[11]Shi Yun,Wang Wei. On conformal qc geometry,spherical qc manifolds and convex cocompact subgroups of Sp(n + 1,1)[J]. DOI 10.1007/s10455-015-9492-y
[12]Jcobowitz H. An introduction to CR structures[A]. Mathematical Surveys and Monographs 32[C]. New York: American Mathematical Society,1990.
[13]Yue Chengbo. Mostow rigidity of rank 1 discrete groups with ergodic Bowen-Margulis measure[J]. Invent Math,1996,125: 75-102.
[14]Corlette K. Hausdorff dimension of limit sets I[J]. Invent Math,1990,102: 521-541.
[15]Chang Derchen,Markina I,Wang Wei. On the Cauchy-Szeg¨o kernel for quaternion siegel Upper half-space[J]. Complex Anal Oper Theory,2013,7: 1623-1654.
Chain and R-circle on quaternionic Heisenberg group and their properties
SHI Yun
(Department of Mathematics,Zhejiang University,Hangzhou 310027,China)
This paper defines chain and R-circle on quaternionic hyperbolic space,and gives the property of chains under the vertical projection. The uniqueness of chain passing through two distinct points and qc-horizontality of R-circles are proved,and the relationship between R-circle and pure imaginary R-circle is given.
quaternionic hyperbolic space;quaternionic Heisenberg group;chain;R-circle MR Subject Classification: 53C15;53C56
O184
A
1000-4424(2016)01-0090-11
2015-11-13
2016-01-15
国家自然基金(11171298;11571305)
猜你喜欢
数学物理学报(2022年4期)2022-08-22
军事文摘(2021年22期)2022-01-18
数学物理学报(2020年2期)2020-06-02
华东师范大学学报(自然科学版)(2020年1期)2020-03-16
数学年刊A辑(中文版)(2019年3期)2019-10-08
现代苏州(2019年16期)2019-09-27
语言与文化论坛(2019年3期)2019-04-13
数学物理学报(2019年1期)2019-03-21
湖北文理学院学报(2017年2期)2017-04-16
湖南城市学院学报(自然科学版)(2016年4期)2016-02-27
