现代化卫星导航电文编码方案设计与分析
2016-06-27 02:04:24谢维华陈娉娉咸德勇
导航定位学报 2016年2期
关键词:编码方案
谢维华,陈娉娉,咸德勇
(北京卫星导航中心,北京 100094)
现代化卫星导航电文编码方案设计与分析
谢维华,陈娉娉,咸德勇
(北京卫星导航中心,北京100094)
摘要:针对我国新一代北斗卫星导航系统建设和导航电文设计需求,阐述了各种GNSS导航电文的编码方案,重点分析了现代化GNSS导航电文采用的低密度奇偶校验码编码方案,采用信道建模和蒙特卡洛仿真方法,结果表明:不同码长、不同迭代次数和不同译码方法对低密度奇偶校验码的性能具有较大影响。最后,提出了导航电文编码方案设计建议,为我国北斗全球系统导航电文编码方案的设计提供参考。
关键词:全球卫星导航系统;导航电文;编码方案;低密度奇偶校验码
0引言
导航卫星信号一般由 3 部分组成:载波信号、伪随机噪声码(测距码)和数据码。其中,数据码是卫星以二进制码流形式发送给用户的导航定位数据,通常称为导航电文[1]。导航电文是全球导航卫星系统 (global navigation satellite system,GNSS) 的关键要素[2],依靠由系统广播的导航电文所提供的信息数据,接收机用户得以正确计算出其位置并获得精确的时间信息。导航电文是导航卫星信号的一个重要组成部分,其设计不但直接影响着GNSS的时效性、完好性、灵活性、可靠性、可扩展性等服务性能,而且还影响着信号跟踪、数据解调误码率和首次定位时间等接收机的多方面性能。导航电文编码方案设计是导航电文设计的重要内容。美国的全球定位系统(global positioning system,GPS)和俄罗斯的全球卫星导航系统(global navigation satellite system,GLONASS)等早期的导航电文,以及北斗卫星导航系统(BeiDou navigation satellite system,BDS)导航电文的编码通常采用汉明码、循环冗余校验(cyclic redundancy check,CRC)码等线性分组码。近年来,随着计算机和通信技术的发展,应用于传统通信领域的多种编码技术已被纷纷地引入GNSS导航电文设计中,所采用的编码技术从线性分组码逐渐发展到卷积码、低密度奇偶校验码(low density parity check code,LDPC)[3]和块交织码等,编译码性能也相应地逐渐得到提高。
本文在对各种导航电文编码技术进行深入分析和比较的基础上,着重对现代化 GNSS 导航电文采用的LDPC码进行了研究,采用信道建模和模特卡罗仿真,给出了不同码长、不同迭代次数和不同译码方法对LDPC码性能的影响,并对我国北斗全球导航系统导航电文编码方案提出设计建议。
1各种GNSS导航电文的编码方案设计分析
目前,世界上已经建成或正在建设中的GNSS系统主要有美国的GPS、俄罗斯的GLONASS、欧盟的伽利略卫星导航系统(Galileo navigation satellite system,Galileo) 以及我国的BDS等。不同系统的导航电文的编码方案设计均有所不同,表1给出了不同卫星导航系统导航电文的编码方案[4-9]。

表1 GNSS信号导航电文的编码方案
通过对表1进行分析,可以得出:
1)BDS的中轨道(middle Earth orbit,MEO)卫星和倾斜地球同步轨道(inclined geosynchronous orbits,IGSO)卫星的B1I和B2I信号播发D1导航电文,地球静止轨道(geostationary orbit,GEO)卫星的B1I和B2I信号播发D2导航电文,纠错编码方案均采用BCH(15,11,1)码加交织方式,BCH码长为15比特,信息位为11比特,编码效率为73.3%,纠错能力为1比特。
2)GPS的民用导航电文包括早期 L1 频点 C/A 码导航电文 (表1中称为GPS NAV)、现代化 GPS 在 L5C和 L2C信号播发的导航电文(表1中称为GPS CNAV)以及现代化GPS在L1C信号播发的导航电文(表1中称为GPS CNAV-2)[10-11]。
①GPS NAV导航电文采用汉明码(32,26)编码方案,编码效率为81.25%。
②现代化GPS信号L2C和L5C播发的GPS CNAV导航电文均采用了“CRC-24Q+卷积编码(600,300)”的两重编码方案,编码效率均为50%。一方面,CRC-24Q校验编码具有很强的检错和纠错能力;另一方面,卷积编码对导航电文在信道传输中的随机错误和突发错误具有很强的前向纠错能力。采用这种两重纠检错编码方案,可显著降低接收机导航电文数据比特解调的误码率,提高接收机的数据解调性能。
③GPS在L1C信号播发的GPS CNAV-2导航电文中采用“CRC-24Q校验码+ LDPC码+块交织码”的多重编码方案。首先,考虑到子帧1的9比特段内时(time of interval,TOI)数据的重要性,TOI采用BCH(51,8)编码,以降低接收机对TOI数据的解译错误概率;然后,对子帧2(576比特)和子帧3(250比特)的原始电文数据进行CRC-24Q编码,分别得到600比特和274比特,接着对子帧2和子帧3单独进行LDPC(1 200,600)和LDPC(548,274);最后,对编码后的子帧2和子帧3进行块交织。这种多重差错控制编码方式能有效控制导航电文传输中的随机错误和突发错误。
3)Galileo 系统导航电文共有4种类型,分别为:F/NAV、I/NAV、C/NAV和G/NAV[12]。其中:C/NAV和G/NAV尚未公开;F/NAV和I/NAV导航电文采用与GPS CNAV-2导航电文相类似的多重编码方案。
2导航电文编码方案改进设计分析
现代化的GPS、Galileo对导航电文编码方案做了改进设计,这些改进能够有效控制导航电文在信道传输中的差错,降低接收机导航电文数据比特解调的误码率,提高纠错译码性能。以下对现代化 GNSS 导航电文在编码方案方面的改进设计进行详细分析。
2.1采用高编码增益的LDPC码
与传统GNSS信号相比,导频信号的播发和编码性能的提高是现代化GNSS新颖信号的大突破性进步。由于增加了导频信号,原本全部可以分配给数据分量的信号功率却将其中一部分功率分配给了导频分量。表2给出了GPS现代化信号L1C、L2C和L5C数据分量与导频分量的功率分配及相对于传统GNSS信号(无导频信号分量)的功率损失。

表2 GNSS现代化信号功率分配及相对传统信号的
由表2可以看出:GPS L1C信号将75%的信号总功率分配给其导频信号分量,而只将25%的总功率分配给其数据信号分量,数据信号分量的功率损失约6dB;L2C和L5C这2个信号里,它们的数据与导频2信号分量的功率相等,各自占总信号功率的50%,数据信号分量的功率损失约6 dB。为了弥补功率分配造成的数据信号分量3~6 dB的功率损失,现代化GNSS信号的数据信号分量采用了高编码增益的LDPC编码技术。下面对LDPC码的性能进行详细分析和仿真验证。
2.1.1LDPC码概述
LDPC码是一类具有稀疏校验矩阵的线性分组码,不仅有逼近香农限的良好性能,而且译码复杂度较低,结构灵活。LDPC码分为规则LDPC码和非规则LDPC码2类。规则LDPC码的校验矩阵中每列具有相同个数的“1”,否则称为非规则LDPC码。
2.1.2LDPC码编码增益分析
误码率(bit error ratio,BER)是衡量编码方式纠错性能最重要的指标。未编码信息的误码率见式(1):

(1)
式中:Eb为未编码比特流的每比特能量;N0为未编码比特流的噪声功率谱密度;Eb/N0为信噪比;erfc为互补误差函数。
假设LDPC纠错编码的编码增益为GLDPC,GLDPC与信息速率、编码效率、编码帧长、校验矩阵的构造、编译码算法有很大关系,在采用纠错编码情况下,已编码比特流的误码率见式(2):

(2)
在GPS L1C信号中,使用了1/2编码效率的LDPC(1200,600)和LDPC(548,274)两种编码。该LDPC码的校验矩阵为近似下三角矩阵。假设信号传输信道为高斯白噪声信道,信号调制方式为二进制移相键控(binary phase shift keying,BPSK)调制,采用蒙特卡洛仿真,LDPC译码算法采用置信传播译码算法,译码迭代次数设置为30次,得到GPS L1C信号的CNAV-2导航电文子帧2、子帧3的LDPC码字的误码率曲线如图1所示。图中横坐标为信噪比Eb/N0(单位为dB),纵坐标为误码率。
由图1可知:当误码率为10-6时,未采用LDPC编码时所需的信噪比约为10.6 dB;采用LDPC(1200,600)和LDPC(548,274)编码后,所需的信噪比分别为1.9 dB和2.7 dB,编码增益分别为8.7 dB 和7.9 dB,大于由于功率分配造成的6 dB数据信号分量的功率损失。相同条件下,LDPC(1 200,600)比LDPC(548,274)的编码增益要高一些。
2.1.3不同码长的LDPC码性能仿真验证
假设信号传输信道为加性高斯白噪声(additive white Gaussian noise,AWGN)信道,信号调制方式为BPSK调制,采用蒙特卡洛仿真,LDPC译码算法采用对数域置信传播译码算法,译码迭代次数设置为30次,图2给出了码长分别为256、512和1 024的规则LDPC码的BER性能。其中,码率均为1/2;对应的校验矩阵为128×256、256×512和512×1 024;校验矩阵构造方法采用Mackay随机法,构造矩阵时消除了周长为4的圈。
由图2可以看出:在AWGN信道下,采用相同校验矩阵方法构造的LDPC码,相同码率不同码长的码BER性能各不相同,码长越长,BER性能越好;当信噪比大于1.5 dB时,3个码的BER性能有明显差距,误码率达到10-4时,3个码的曲线间隔大约为0.5 dB;即码长为1 024与码长512、码长512与码长256之间的编码增益相差约0.5 dB。信噪比大于等于3.5 dB时,码长为1 024的LDPC码的误码率低于10-6,可以实现导航电文的可靠传输。
2.1.4不同迭代次数对LDPC码性能的影响
采用码长为256、码率为1/2的LDPC码,其他仿真验证条件与2.1.3节相同,译码迭代次数分别为10次、30次、50次和100次的BER曲线如图3所示。由图3可以看出:在AWGN信道下,LDPC码随着译码迭代次数的增加,译码效果越来越好;但是,当迭代次数达到某一个数值以后,误码率性能基本不再随迭代次数增加而增加。例如,图中迭代次数为50次和迭代次数为100次的2条曲线基本重合。仿真结果表明:一方面,增加迭代次数可以提高LDPC码的译码性能;另一方面,迭代次数并不是越多越好,当达到一定次数时,译码性能基本保持不变,如果一味增加迭代次数,不但不能提升译码性能,反而会降低译码效率。通常,译码次数可取30~50次之间,既可保证较好的译码性能,同时又有较高的译码效率。
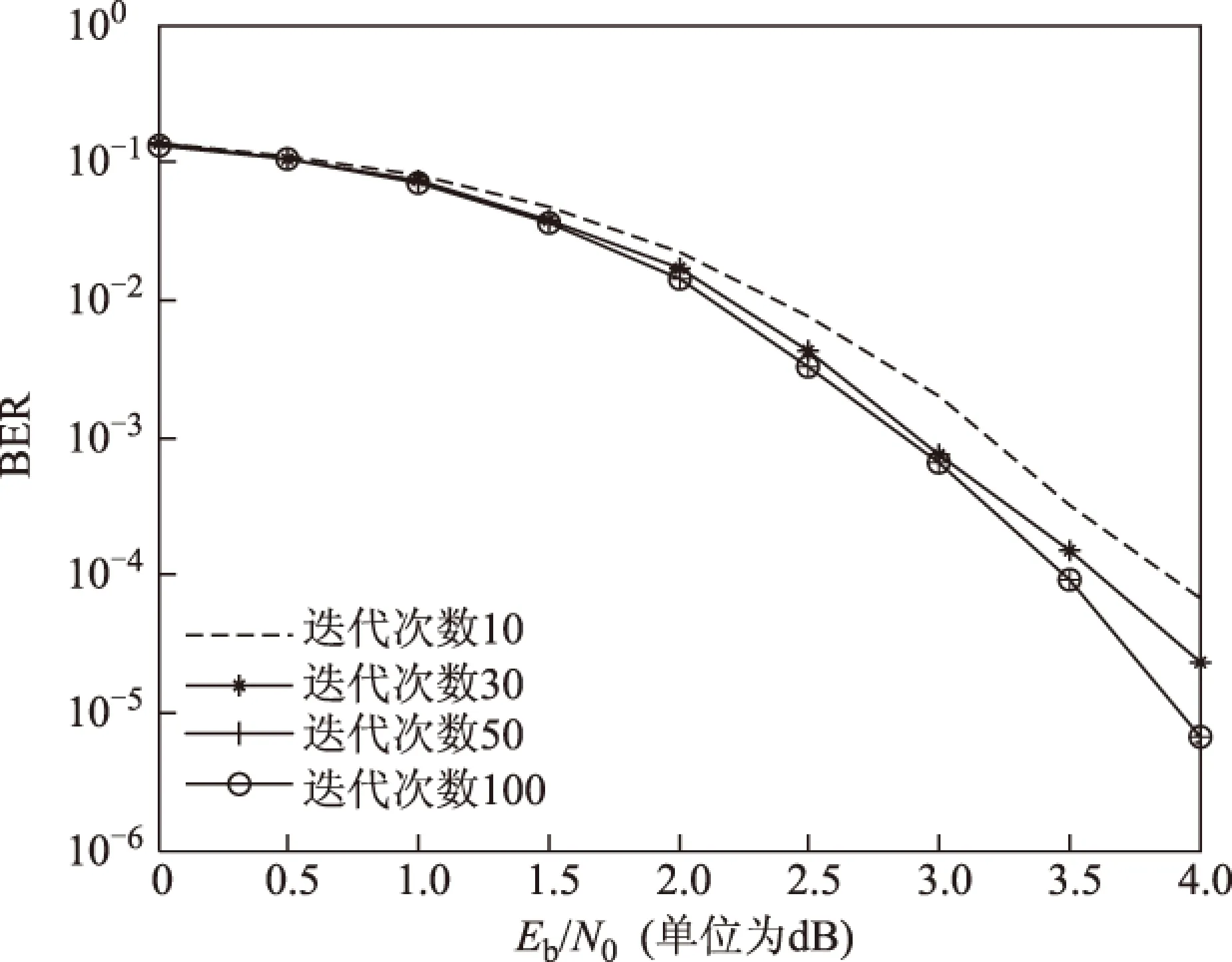
图3 相同译码算法不同迭代次数的LDPC码BER性能比较
2.1.5不同译码方法对LDPC码性能的影响
常用的LDPC译码算法主要包括:消息传递(message propagation,MP)译码算法、置信传播(belief propagation,BP)译码算法、对数域BP(Logarithmic domain belief propagation,LLRBP)译码算法、最小和(minimum sum,MS)译码算法、归一化最小和(normalized minimum sum,NMS)译码算法、比特翻转译码算法、加权比特翻转译码算法。这几种译码算法中:BP译码算法的译码性能最好,但复杂度很高;LLR-BP译码算法、MS译码算法、NMS译码算法是BP译码算法的各种简化算法,计算复杂度大大降低,译码性能接近BP译码算法。一般可根据接收机的硬件资源,选择相应译码算法。图4给出了在相同条件下,分别采用BP和LLR-BP译码算法、LDPC码的BER性能。

图4 不同译码算法对LDPC码BER性能的影响
2.2对重要电文参数采用非本原BCH编码技术
GPS CNAV-2的第1子帧始终是9比特的段内时,它用来指出下一帧起始延所对应的卫星时间,每一时间段长2 h,每段包含400帧电文;因此考虑到TOI数据的重要性,该子帧采用非本原BCH(51,8)编码。虽然编码效率较低,约为17.3%,但却有着较大的最小汉明距离,能够纠正多个错误,可极大降低接收机对TOI数据的解译错误概率。而且,采用BCH(51,8)编码还有一个好处:因为不同卫星基本上在同一时刻播发具有相同值的段内时,所以接收机可以将来自不同卫星的段内时数据信息综合起来,以改善对段内时数据的解调灵敏度。
BCH码是一种获得广泛应用的循环码,它是以Bose、Chaudhuri和Hocguenghem等3位发明这种码的人名命名的。BCH码分为本原BCH码和非本原BCH码2类:本原BCH码的生成多项式g(x)中含有最高次数为m的本原多项式,且码长n=2m-1(m≥3,为正整数),如表1第2行中北斗导航系统的D1码和D2码采用的BCH(15,11,1)就是本原BCH码;非本原BCH码的生成多项式中不包含这种本原多项式,且码长n是(2m-1)的一个因子,即n一定除得尽2m-1,如BCH(51,8)就是非本原BCH码。
2.3采用块交织编码技术
在信号传播过程中,随时间变化的多径传输信道通常可使信号表现为衰落,它使得信号载噪比发生波动、降低,从而导致接收机在数据比特解调时发生突发性的、连续的大量错误。应付此类突发错误的方法大致可分为2类:一类是构造出能纠正突发错误的编码;另一类就是对编码数据再进行交织后才播发。GPS CNAV-2导航电文中对子帧2和子帧3采用38×46的块交织方式,这相当于将突发错误信道人为地转变成为统计独立错误信道,可极大降低发生突发性、连续性错误时接收机数据比特解调误码率。交织过程可概括为“按行填写阵列、按列读取阵列”2个步骤。
需要注意的是,块交织编码与解交织过程会对信息的传递产生延迟,因而在设计块交织时,要充分考虑延迟影响,每一块块交织数据不宜内容过多、占时过长。
2.4采用多重编码方式
GPS在L1C信号播发的GPS CNAV-2导航电文中采用“CRC-24Q校验码+ LDPC码+块交织码”的多重编码方案。一方面,CRC-24Q校验编码具有很强的检错和纠错能力:1)能检测该帧(子帧)任意地方的1、2个或奇数个比特的差错;2)能检测到任意小于等于24个的连续突发比特错误;3)在比特错误率不大于0.5的条件下,能够检测到大多数大于24个的连续突发比特错误,不能检测出任意25个连续突发比特错误的概率不超过1.19×10-7(即2-23),不能检测出任意大于25个连续突发比特错误的概率不超过5.98×10-8(即2-24)。另一方面,LDPC码有着较高的编码增益,而块交织编码能提高抗突发错误和抗衰落的能力。
这种多重差错控制编码方式能有效控制导航电文传输中的连续错误、随机错误和突发错误,是一种非常有效、值得借鉴的导航电文编码方案,可显著降低接收机导航电文数据比特解调的误码率,提高接收机的数据解调性能。
3结束语
我国BDS作为现代化 GNSS 的一员,为了适应系统体制变化、满足各类用户对系统性能和功能需求的提高以及与世界现代化 GNSS 兼容与互操作的需求等,在研制建设中也将面临导航电文编码方案的设计问题。北斗全球系统导航电文编码方案的设计应综合借鉴CNAV、CNAV-2、F/NAV 以及 I/NAV 等电文编码方案的先进设计经验,并结合系统体制和特点,针对不同的服务种类和导航电文类型,从编码增益、编码效率、编译码时延、编译码复杂度等方面进行权衡。具体设计建议如下:
1)采用具有高编码增益、低实现复杂度和无专利制约的LDPC码作为信道纠错码;
2)采用“CRC-24Q校验码+ LDPC码+交织码”的多重编码方案;
3)针对不同的服务类型需求和信号分量,分别设计不同的编码方案。
参考文献
[1]陈金平,王梦丽,钱曙光.GNSS导航电文设计分析[J].电子与信息学报,2011,33(1):211-217.
[2]张蓓,赵昀,高米.GNSS导航电文对接收机用户的性能影响分析[J].无线电工程,2013,43(5):35-38.
[3]CHUNG S,FORNEY G,RICHARDSON T,et al.On the design of low-density parity-check codes within 0.0045dB of the Shannon limit[J].IEEE communications letters,2001,5(2):58-60.
[4]谢钢.全球导航卫星系统原理—GPS、格洛纳斯和伽利略系统[M].北京:电子工业出版社,2013:116-160.
[5]中国卫星导航系统管理办公室.北斗卫星导航系统空间信号接口控制文件公开服务信号(2.0版)[EB/OL].(2013-12-27)[2015-07-19].http://www.beidou.gov.cn/attach/2013/12/26/2013122604a521b35b7f4a54b44cfbbc8abd74a8.pdf.
[6]陈南,杨力,丁群.Galileo开放服务导航电文特点分析[J].测绘科学技术学报,2008,25(5):129-135.
[7]陈南,贾小林,崔先强.GPS民用导航电文CNAV的特点[J].全球定位系统,2006,31(1):1-6.
[8]李建文,郝金明,张建军,等.GLONASS卫星导航系统的导航电文[J].测绘学院学报,2001,18(3):1-7.
[9]张炳琪,刘峰,李健,等.北斗导航系统电文播发方式研究[J].武汉大学学报·信息科学版,2011,36(4):486-489.
[10]Global Positiong Systems Directorate.Interface specification IS-GPS-800D:Navstar GPS space segment/user segment L1C interfaces[EB/OL].(2014-03-21)[2015-07-19].http://www.gps.gov/technical/icwg/IS-GPS-800D.pdf.
[11]STANSELL T,HUDNUT K,KEEGAN R.Future wave:L1C signal performance and receiver design[J].GPS World,2011,22(4):30-38.
[12]JARI N,ELENA S,STEPHAN S,et al.Galileo positioning technology[M].Berlin:Springer Press,2014:35-43.
Design and analysis of modernization GNSS navigation message encoding solution
XIE Weihua,CHEN Pingping,XIAN Deyong
(Beijing Satellite Navigation Center,Beijing 100094,China)
Abstract:In view of our country’s new generation BDS construction and navigation message design requirements,encoding solutions for various GNSS navigation messages were described.In this paper,the low density parity check(LDPC) codes of the modern GNSS navigation message was analyzed.Channel modeling and Monte Carlo simulation were used to validate the performance of LDPC.The results showed that different code length,different number of iterations and different decoding methods would have great influence on the performance of LDPC codes.In the end,the suggestion of the encoding solution design for the navigation message was put forward,which could provide a reference for the design of the encoding scheme of BDS.
Keywords:GNSS;navigation message;encoding solution;low-density parity check code
收稿日期:2015-07-27
第一作者简介:谢维华(1979—),男,福建将乐人,博士,高级工程师,研究反向为卫星导航接收机设计和数据处理。
中图分类号:P228
文献标志码:A
文章编号:2095-4999(2016)02-0010-06
引文格式:谢维华,陈娉娉,咸德勇.现代化卫星导航电文编码方案设计与分析[J].导航定位学报,2016,4(2):10-9.(XIE Weihua,CHEN Pingping,XIAN Deyong.Design and analysis of modernization GNSS navigation message encoding solution[J].Journal of Navigation and Positioning,2016,4(2):.)DOI:10.16547/j.cnki.10-1096.20160203.
猜你喜欢
杭州电子科技大学学报(自然科学版)(2022年1期)2022-02-23 02:50:22
电子与信息学报(2021年11期)2021-12-02 10:09:48
无线电通信技术(2021年6期)2021-11-24 07:39:42
装备制造技术(2021年5期)2021-08-14 01:45:28
华东交通大学学报(2021年3期)2021-07-27 07:14:06
铁道通信信号(2020年5期)2020-09-21 09:21:26
山东工业技术(2018年21期)2018-12-07 10:07:08
计算机应用(2018年8期)2018-10-16 03:13:44
智富时代(2017年7期)2017-09-05 13:40:01
中国新通信(2015年9期)2015-05-30 16:17:07