
含混合间隙多体系统动力学分析
2016-06-23 09:38王铁成陈国平孙东阳
振动与冲击 2016年9期
王铁成 , 陈国平 , 马 方, 孙东阳
(1.南京航空航天大学 机械结构力学及控制国家重点实验室,南京 210016;2.盐城工业职业技术学院 汽车工程学院,盐城 224005; 3.重庆大学 航空航天学院,重庆 400044)
含混合间隙多体系统动力学分析
王铁成1, 陈国平1, 马方2, 孙东阳3
(1.南京航空航天大学 机械结构力学及控制国家重点实验室,南京210016;2.盐城工业职业技术学院 汽车工程学院,盐城224005; 3.重庆大学 航空航天学院,重庆400044)
摘要:研究了混合间隙对多体系统动力学特性的影响。首先建立了同时含旋转副间隙和移动副间隙的多体系统动力学模型,然后以曲柄滑块机构为研究对象,分析了混合间隙对该系统动力学特性的影响。结果表明,混合间隙对滑块速度的影响不明显,对滑块加速度和曲柄力矩的影响比单个间隙的影响更加剧烈。为工程中建立更精确的含间隙机械系统动力学模型提供了理论依据。
关键词:旋转副间隙;移动副间隙;多体系统;动力特性
在实际工程中,加工、装配以及工作过程中的磨损、变形均会造成机械系统的运动副存在间隙。间隙会显著降低机械系统的工作性能。为了得到更精确的计算结果,就需要考虑运动副间隙对机械系统动力学特性的影响。因此,国内外学者对含间隙多体系统进行了广泛的研究,并取得了大量的研究成果。
Flores等[1-2]对含单间隙的多体系统进行了系统的研究,以曲柄滑块机构为例,分析了旋转副间隙对多体系统动力学特性的影响,同时对含有球铰间隙的多体系统进行了研究。田强等[3]对含有单个间隙的柔性系统进行了研究,分析了柔性对含间隙的多体系统动力学响应的影响。郝雪清等[4]研究了不同运动副材料对间隙机构动力学特性的影响。Ravn等[5-6]分别对含旋转副间隙的双摆系统和曲柄滑块机构进行了试验研究,并且试验结果与数值仿真结果都是吻合的。上述研究都只考虑多体系统中存在单间隙,针对含多间隙的多体系统, Flores[7]建立了含有多个旋转副间隙的多体系统动力学模型。随后,Muvengei[8]对含有两个旋转副间隙的平面刚体系统进行了研究,并且对比了单间隙和多间隙对多体系统动力学特性的影响。除了旋转副间隙,移动副间隙也广泛的存在于机械系统中,Flores等[9-10]对含滑移副间隙的曲柄滑块机构进行了动力学分析。更一般的情况是机械系统中同时存在旋转副间隙和移动副间隙,目前,含混合间隙多体系统动力学特性的研究还鲜见相关报道。本文建立了同时含旋转副间隙和移动副间隙的多体系统动力学模型,并且分析了混合间隙对多体系统动力学特性的影响。
1间隙模型
1.1旋转副间隙模型

轴与轴承的中心距矢量和中心距分别可以表示为
(1)
(2)
轴与轴承接触点的单位法向量表示为
(3)
如图1所示,当轴和轴承发生碰撞时,其嵌入深度表示为
δ=eij-C
(4)
式中C为间隙尺寸,其值等于轴承半径Ri与轴半径Rj之差,即C=Ri-Rj。
体i和体j的接触点Qi和Qj在全局坐标系中的矢量表示为
(5)
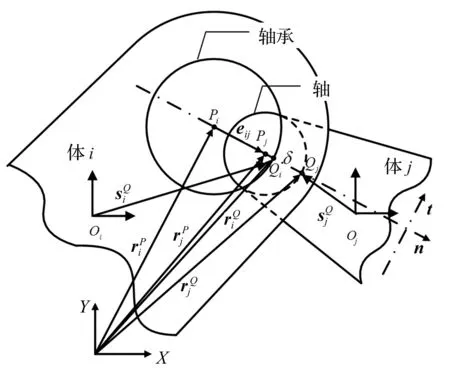
图1 旋转副间隙Fig.1 Revolute joint with clear
将式(5)对时间求导,得到接触点Qi和Qj的全局速度矢量
(6)
将接触点速度向接触面的法向和切向进行投影得到法向速度vN和切向速度vT,相对法向速度确定两个碰撞体是相对接近还是分离情况,相对切向速度确定两个体是否存在相对滑动。相对法向和切向速度可表示为
(7)
(8)
式中向量n逆时针旋转90°得到切向量t。
当轴和轴承发生碰撞时,在碰撞面处就会产生碰撞力,将碰撞力分别向法向n和切向t投影,其中作用在碰撞点处的法向力fn可以表示为
fn=FNn
(9)
考虑到碰撞过程中的能量耗散,Lankarani和Nikravesh提出的连续碰撞模型[11]是应用最广泛的一种碰撞力模型,该碰撞力模型可以表示为
(10)
(11)
其中参数hi和hj为
(12)
式中vk为泊松比,Ek为弹性模量。
当碰撞过程中存在相对切向运动时,会在接触面上产生摩擦力,根据Ambrósio[12]提出的库伦摩擦力法则,切向力ft可表示为
(13)
式中cf为摩擦系数,cd为动态校正系数,表示为
(14)
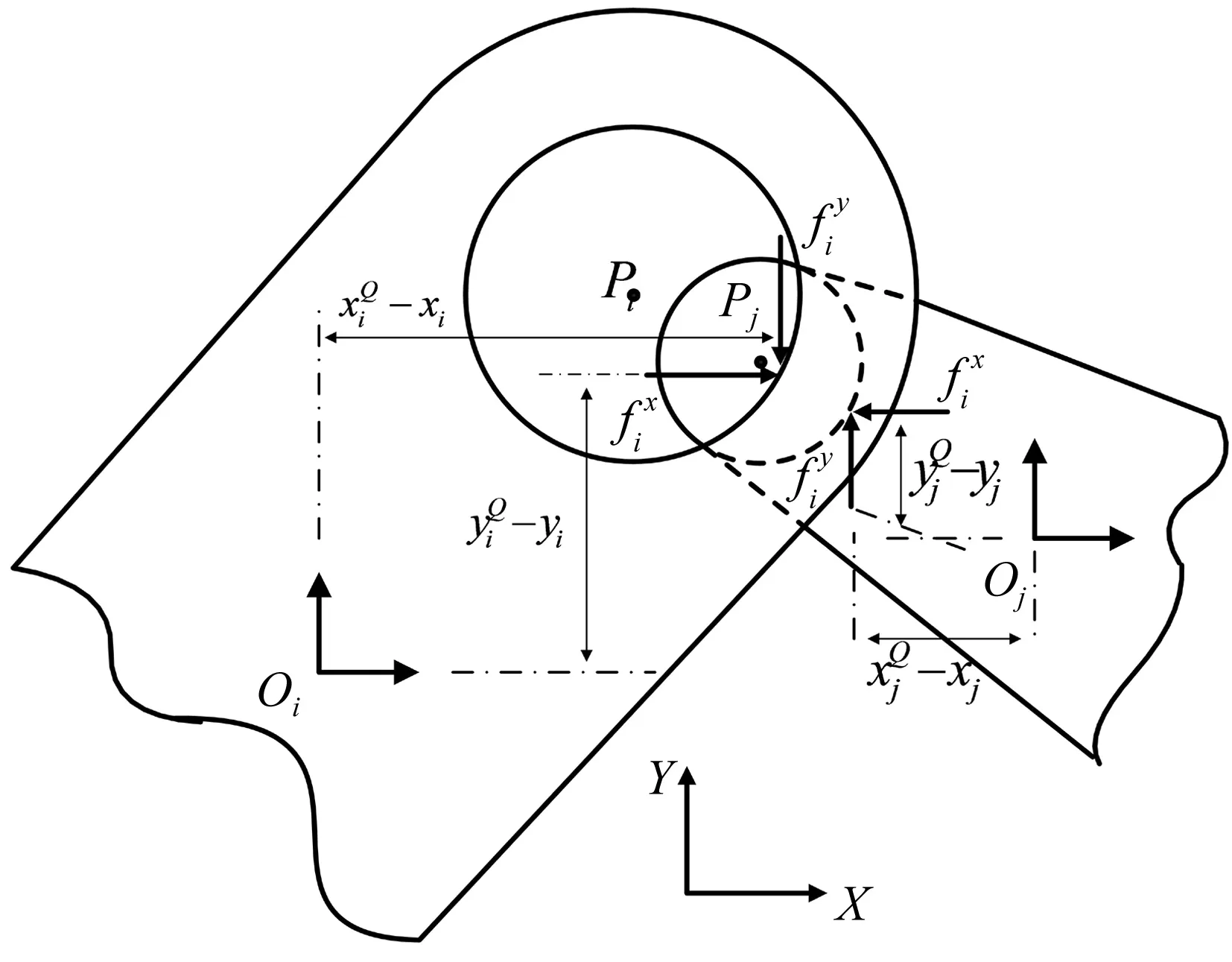
图2 接触点力矢量Fig.2 Force vectors that act at the point of contact
将作用在体i和体j接触面上的法向力和切向力分别等效到体i和体j的质心Oi和Oj,如图2所示,则作用在体i质心上的力和力矩分别为
fi=fn+ft
(15)
(16)
作用在体j质心上的力和力矩分别为
fj=-fi
(17)
(18)
1.2移动铰间隙模型
含有间隙的移动副模型如图3所示,它是由滑块和导槽构成。滑块长度为L,高度为W,导槽的高度为H,间隙大小为c,其表达式为
c=(H-W)/2
(19)
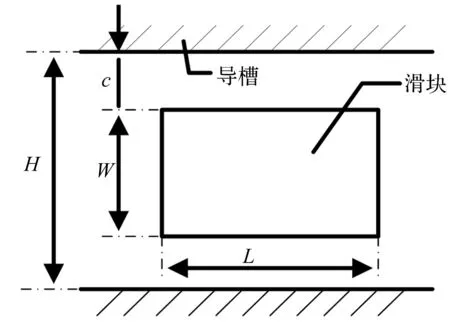
图3 移动副模型Fig.3 Translation joint
如图4所示,移动副间隙接触状态比旋转间隙的分析要复杂,接触状态有四种:(a)自由状态,即滑块与导槽无接触;(b)滑块一角与导槽接触;(c)侧面全接触状态,(d)两个对角同时接触导槽。
为建立移动副间隙的受力分析模型,如图6所示,将与体j固连的局部坐标系中由P点指向Q点的单位矢量t′,向惯性坐标系投影可以得到
t=Hjt′
(20)
式中Hj是体j固连坐标系到总体坐标系的转换阵。
对体j和体i上的任意点G用总体坐标系中的坐标可表示为
(21)

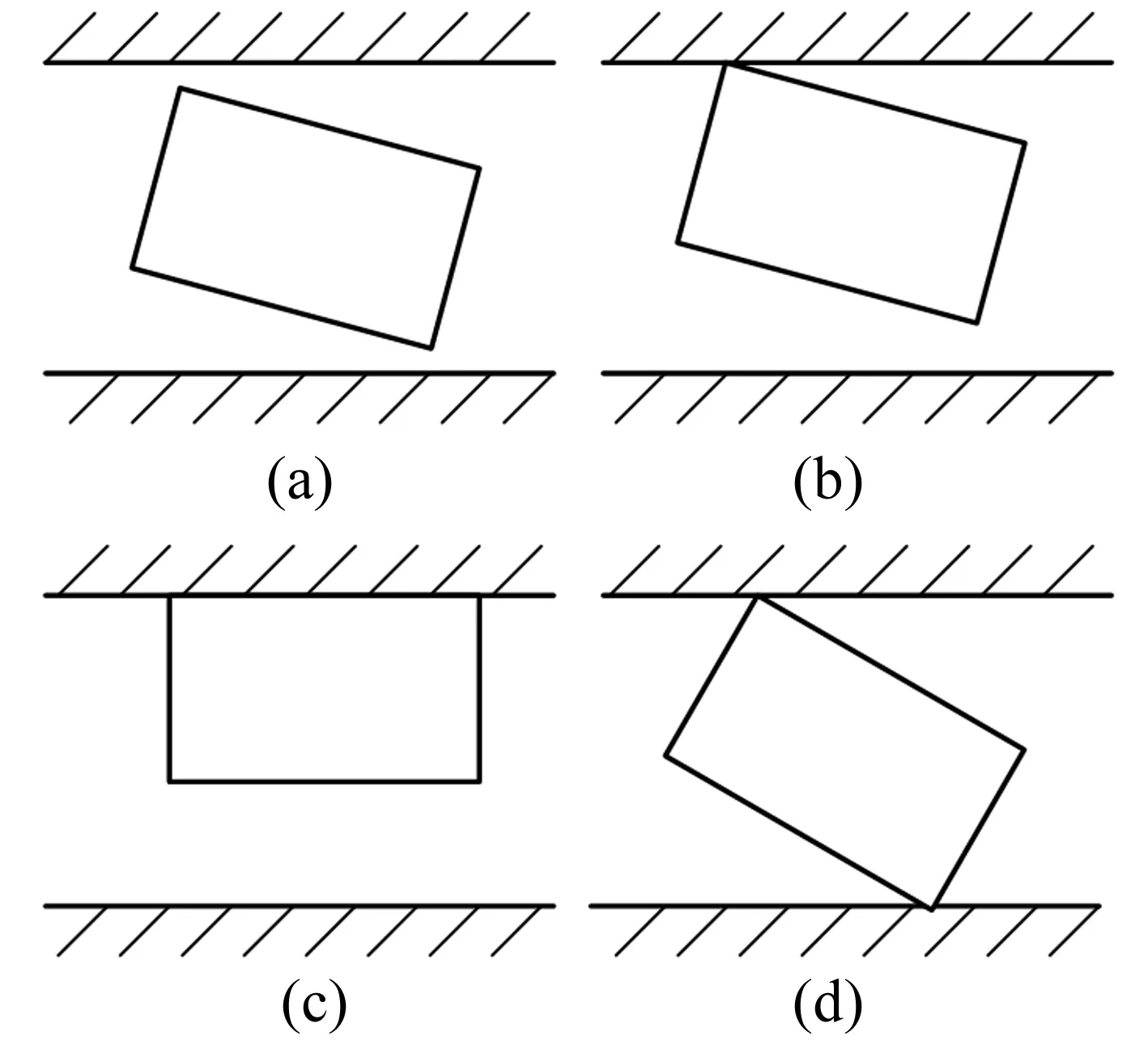
图4 移动铰不同运动状态Fig.4 Different scenarios for the slide motion
如图5所示,导槽PQ边上离滑块点Ai距离最近的点Aj在总体坐标中的位置矢量可表示为
(22)
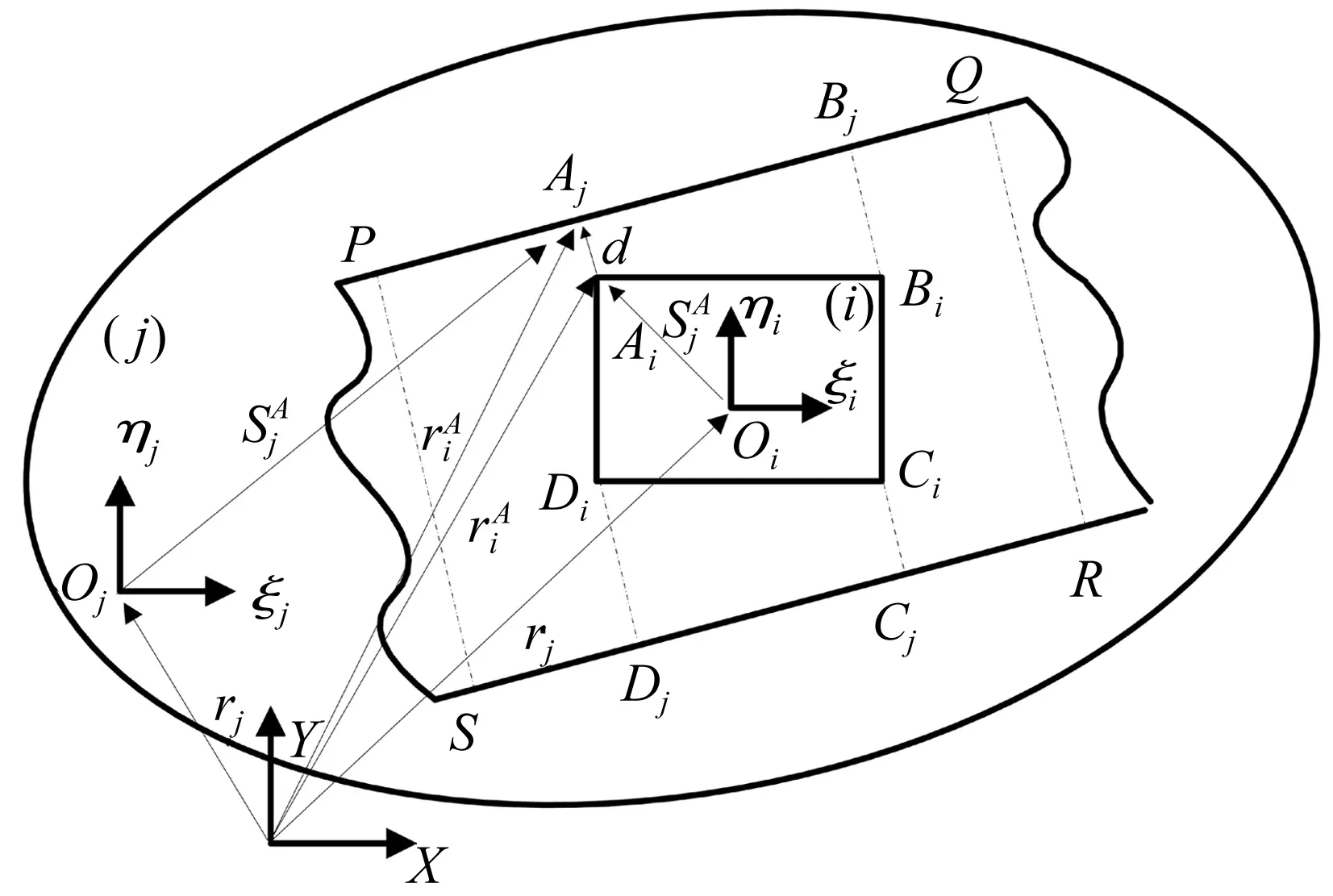
图5 移动铰间隙Fig.5 Translation joint with clearance
连接滑块上点Ai到导槽上点Aj的矢量为
(23)
式中:注意d的方向是与导槽表面的法向方向n是一致,可由单位向量t顺时针方向旋转90°得到。则n可表示为
n=[ty,-tx]
(24)
滑块和导槽发生碰撞并有渗透时,满足下式条件
dTn<0
(25)
滑块与导槽的碰撞力,根据Lankarani提出的两平面间线性接触力模型[13]得
(26)
式中的Ks为接触刚度,由下式确定
(27)
式中,a是矩形接触面周长的一半。hi和hj可由式(12)计算得到。
则作用在滑块上的法向力fn可以表示为
fn=FNn
(28)
作用在滑块上的摩擦力ft同样可由式(13)给出。
如图6所示,将作用在接触面上的碰撞力等效到质心上,则作用在滑块i质心上的力和力矩分别为
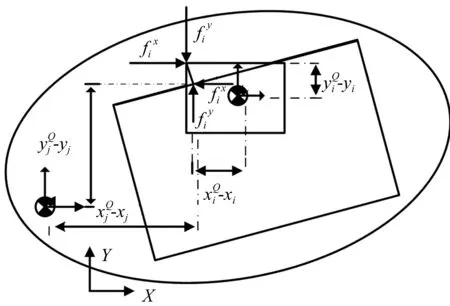
图6 接触点力矢量Fig.6 Force vectors that act at the point of contact
fi=fn+ft
(29)
(30)
作用在导槽体j质心上的力和力矩分别为
fj=-fi
(31)
(32)
2含间隙的多体系统动力学方程
采用拉格朗日方法,建立存在间隙的含约束的多体系统动力学方程为
(33)

(34)
式中,α、β为稳定性系数,经验表明,α、β的取值范围在1~50之间。
3算例分析
本文以曲柄滑块机构为例,分析混合间隙对机械系统动力学特性的影响。该曲柄滑块机构由地面1,曲柄2,连杆3,滑块4组成,如图7所示,其相关的结构参数见表1 。
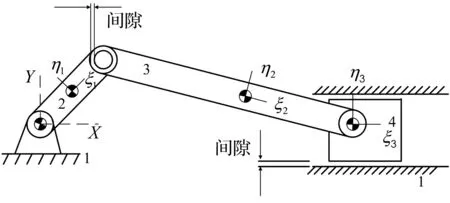
图7 曲柄滑块Fig.7 Slide-crank mechanism with a translation clearance joint and a revolute clearance joint
曲柄以5 000 r/min的速度转动,并带动连杆运动。初始情况下,曲柄和连杆都处于水平位置。本文在以下四种工况下对曲柄滑块机构进行了动力学分析:① 理想连接;② 连杆与曲柄连接处存在旋转间隙,间隙大小为0.2 mm;③ 滑块与地面间存在滑移间隙,间隙大小为0.2 mm;④ 连杆与曲柄连接处存在旋转间隙,且滑块与地面间存在滑移间隙,两处间隙大小均为0.2 mm。曲柄滑块机构材料与运动副参数如表2所示。
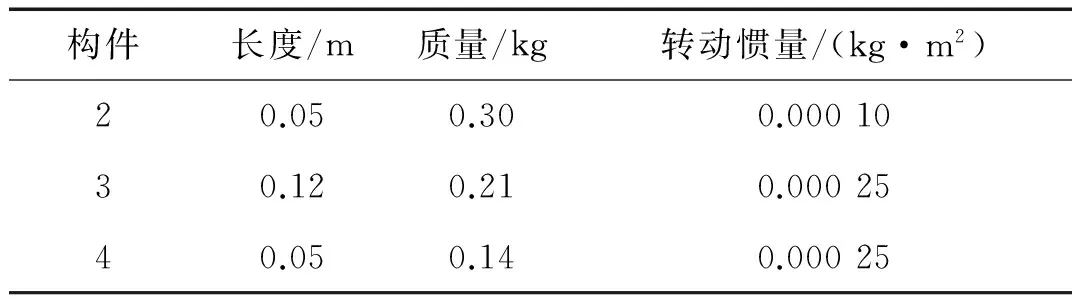
表1 曲柄滑块机构结构参数
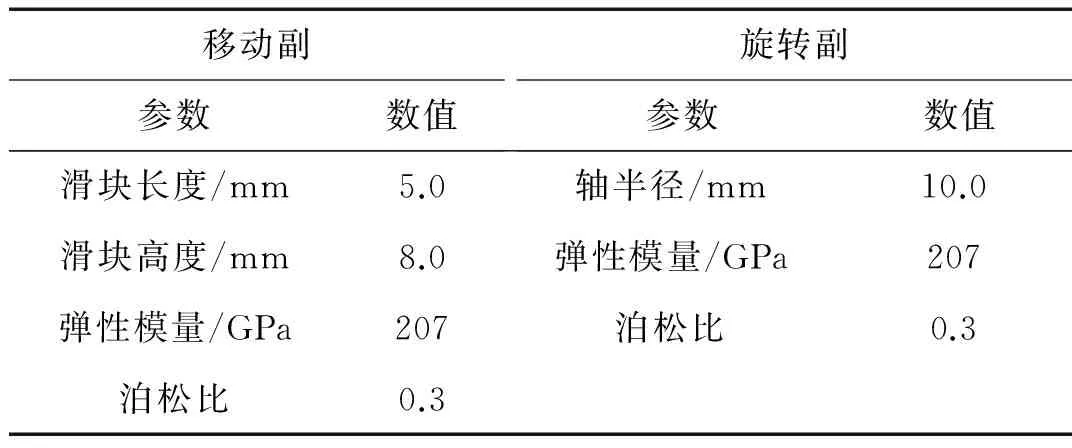
表2 含间隙曲柄滑块机构动力学模拟参数
四种工况下,滑块的速度、加速度以及曲柄力矩如图8~图10所示。由图9可以发现,三种间隙情况下,滑块的速度曲线和理想连接情况几乎一致,表明间隙对速度的影响较小。由图9可以发现,滑块加速度曲线有很多毛刺,表明滑块的加速度受间隙碰撞力的影响较大,同时也表明,间隙会使运动副部件之间产生频繁的接触碰撞。由图9和图10可以发现,在这三种含有间隙的工况中,混合间隙对滑块加速度和曲柄力矩的影响最大,其次是旋转副间隙,移动副间隙对滑块加速度和曲柄力矩的影响是最小,由图还可以发现,混合间隙对滑块加速度和曲柄力矩的影响并不是两种单一间隙影响的线性叠加,因此,混合间隙对机械系统动力学特性的影响是复杂的非线性关系。
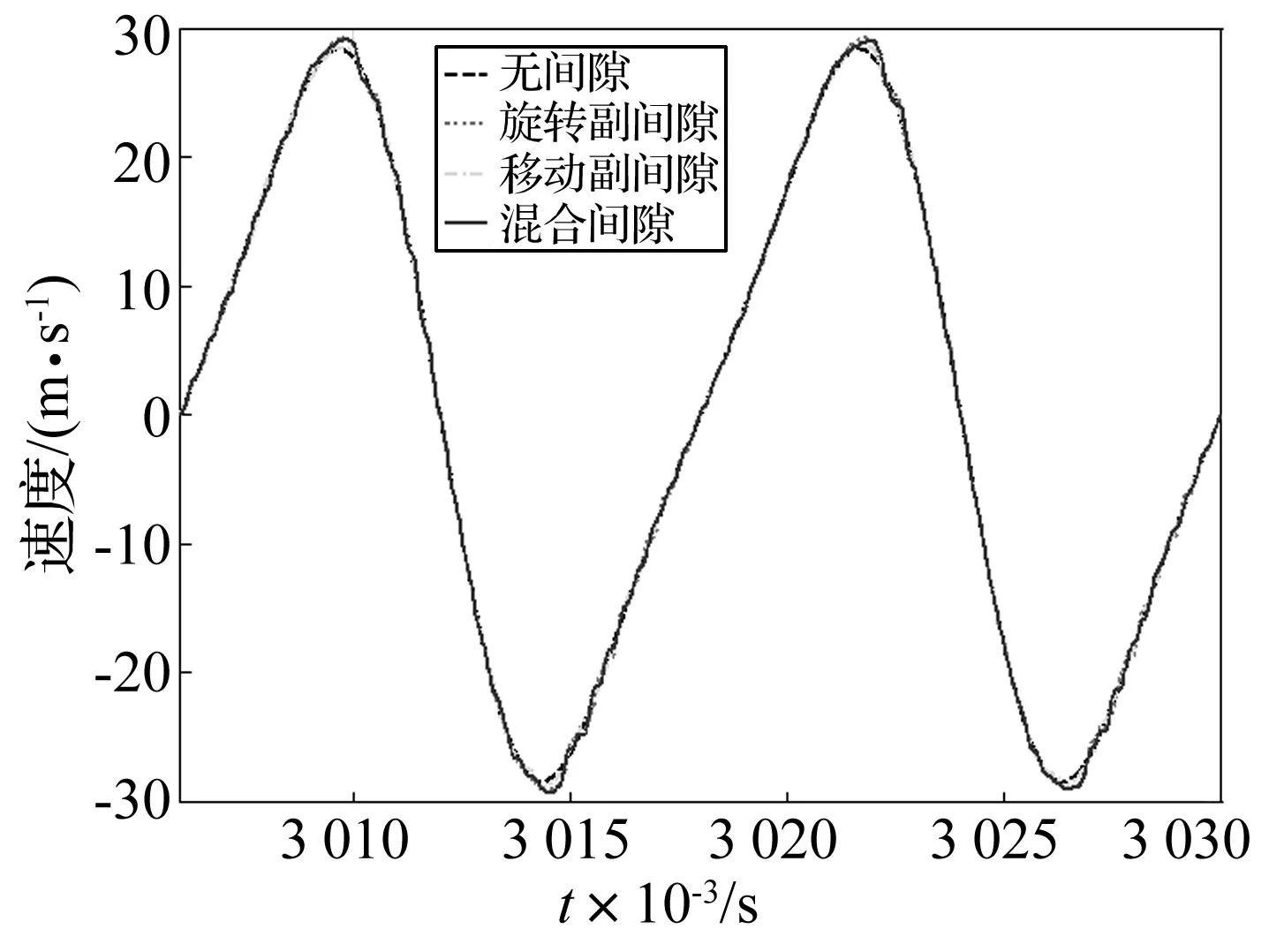
图8 滑块速度Fig.8 Slide velocity
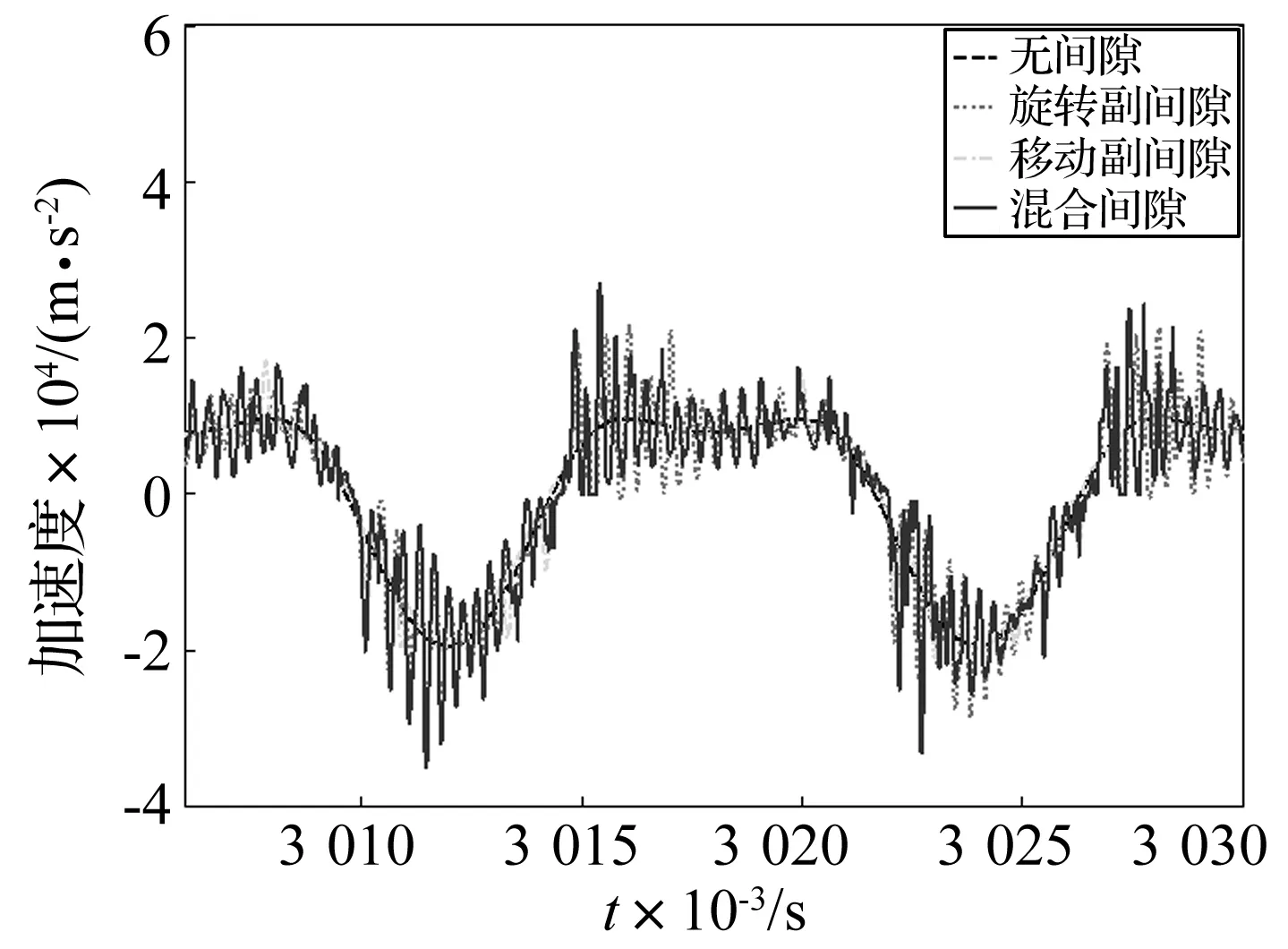
图9 滑块加速度Fig.9 Slide acceleration
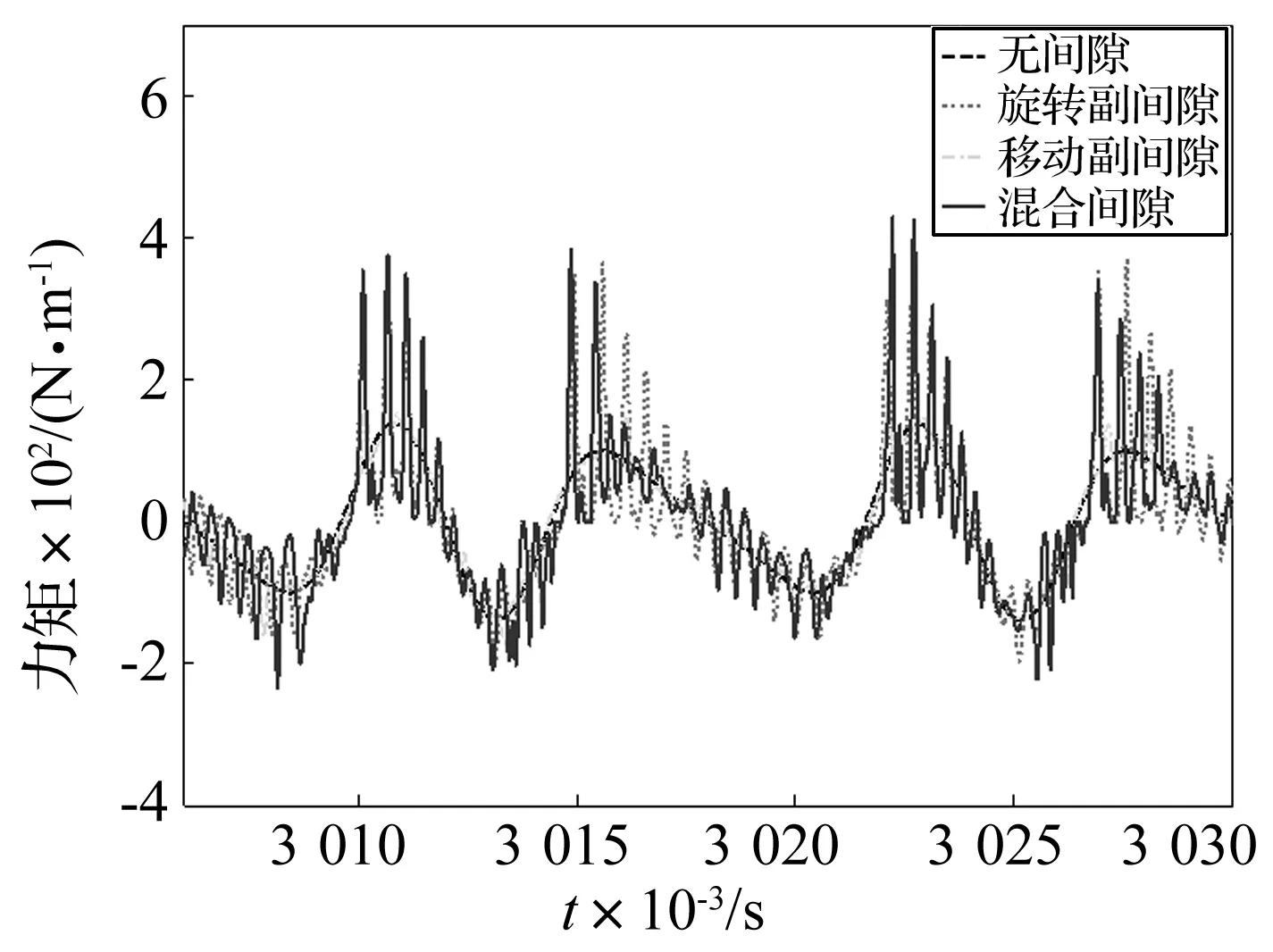
图10 曲柄力矩Fig.10 Crank moment
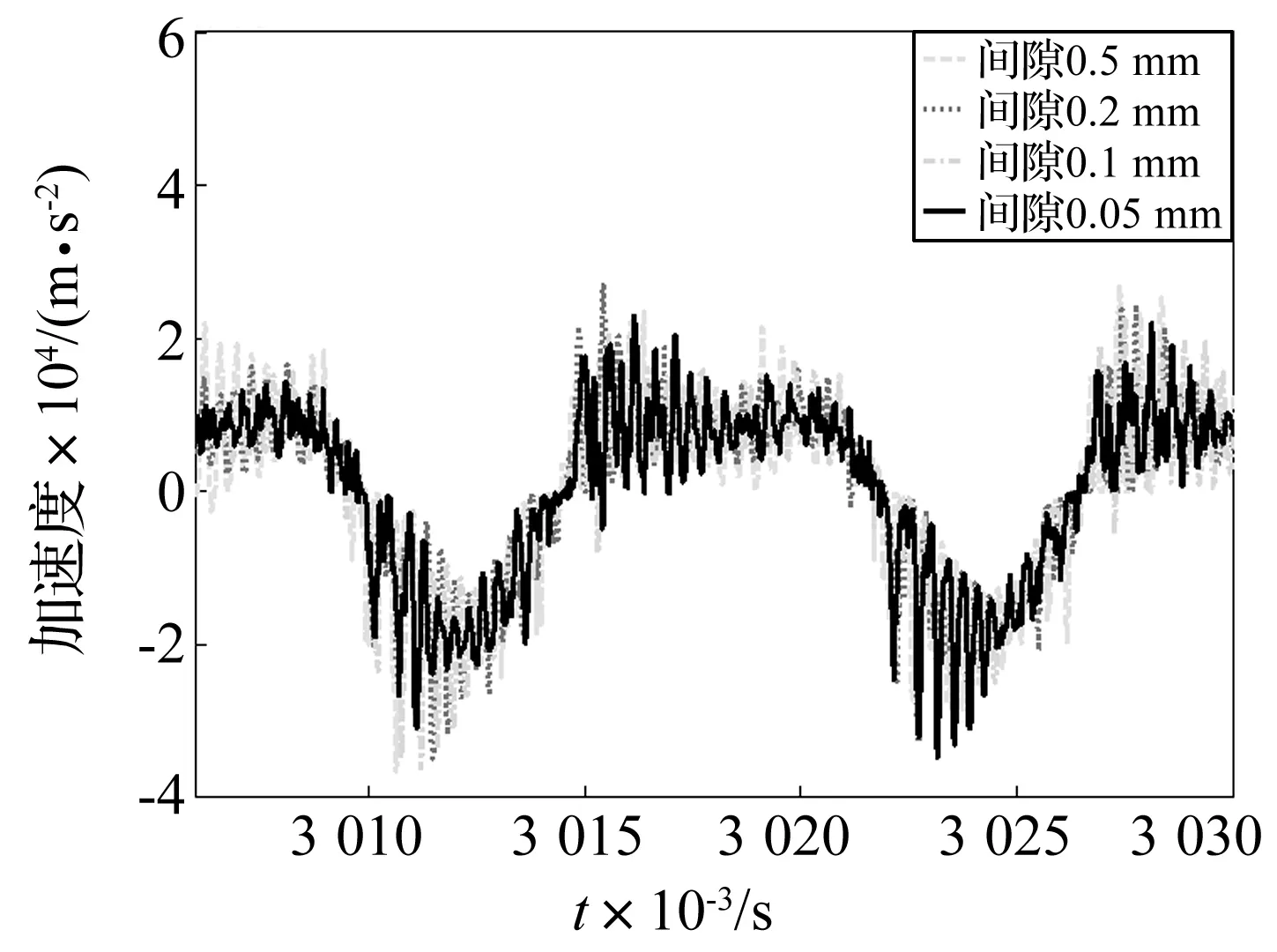
图11 改变移动副间隙尺寸滑块加速度Fig.11 Slide acceleration of different the translation clearance
为研究多间隙情况下间隙尺寸对曲柄滑块机构动力学特性的影响,在以下两种情况下对该系统进行了动力学分析:① 给定旋转副间隙为0.2 mm,分别取移动副间隙为0.5 mm、0.2 mm、0.1 mm、0.05 mm。② 给定移动副间隙为0.2 mm,分别取旋转副间隙为0.5 mm、0.2 mm、0.1 mm、0.05 mm。
图11~图14分别表示的是旋转间隙固定和移动间隙固定时滑块的加速度曲线和曲柄力矩曲线。可以发现,滑块的加速度曲线和曲柄力矩曲线毛刺较多,而且随着旋转副间隙或移动副间隙的增大,毛刺峰值都有不同程度的增大。同时可以发现,并不是间隙越大,滑块加速度和驱动力矩在每一时间点都越大。通过对比图11~图14可知,增加旋转副间隙尺寸时滑块加速度和曲柄力矩的变化比增加移动副间隙尺寸时的变化更加明显,因此,旋转副间隙对该系统动力学特性的影响比移动副间隙更显著。
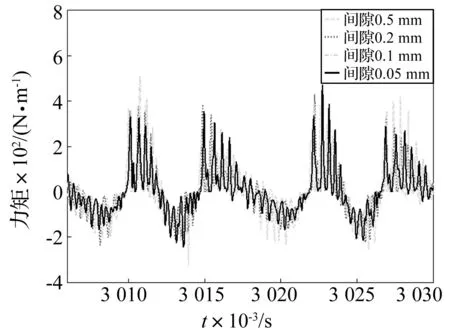
图12 移动副间隙不同时曲柄力矩Fig.12 Crank torque of different translation clearance
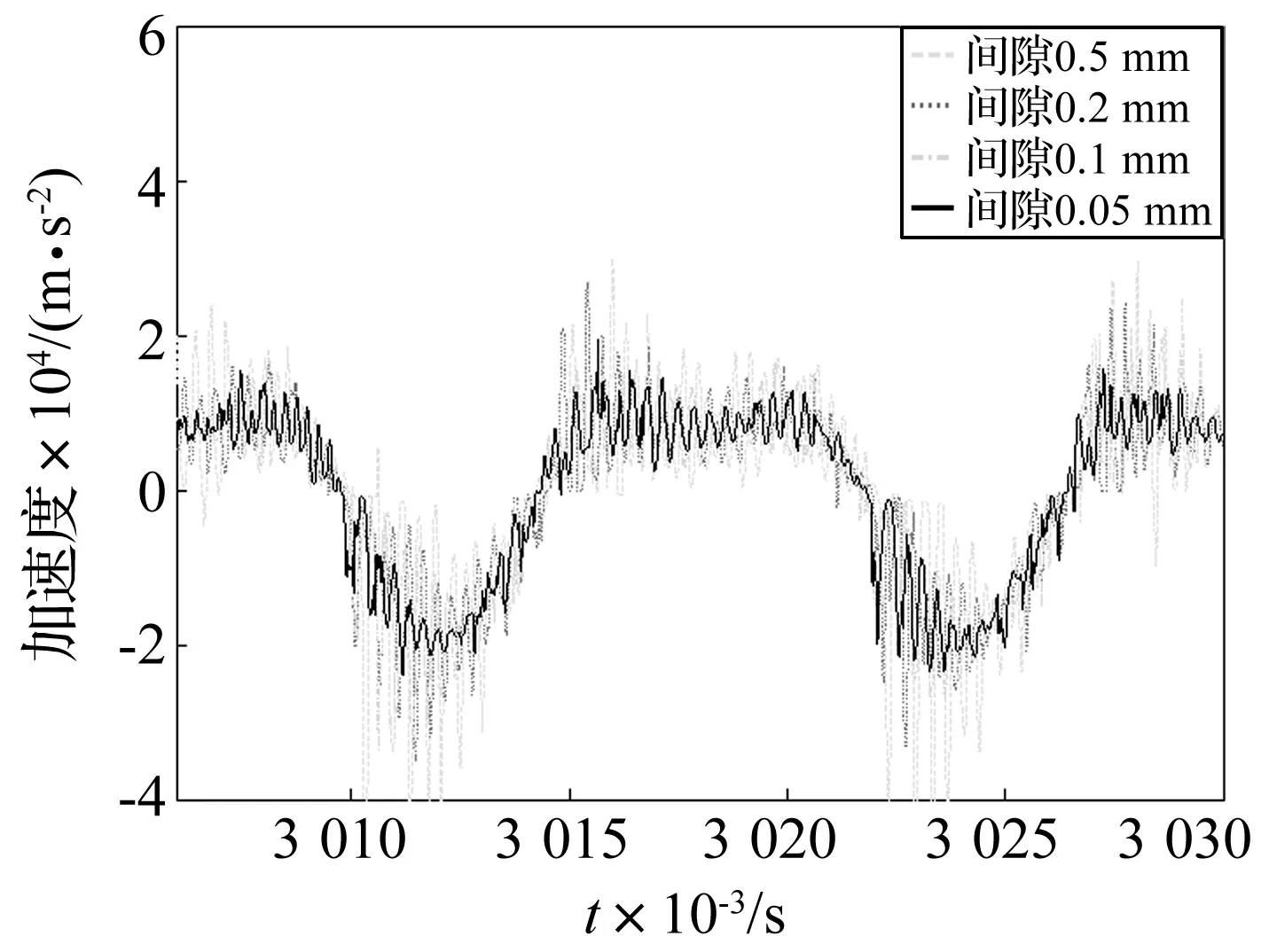
图13 改变旋转副间隙尺寸滑块加速度Fig.13 Slide acceleration of different the revolute clearance
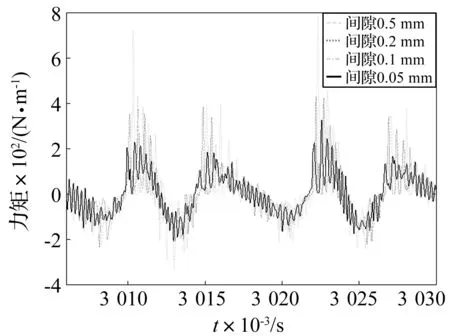
图14 改变旋转副间隙尺寸曲柄力矩Fig.14 Crank torque of different the revolute clearance
4结论
本文以曲柄滑块机构为研究对象,建立了同时含有移动副间隙和旋转副间隙的动力学特性计算模型,首先,分四种情况计算了滑块速度、加速度和曲柄力矩。计算结果表明,混合间隙对滑块速度的影响不明显,而对滑块加速度和曲柄力矩的影响较大,而且混合间隙对该系统动力学特性的影响不是两种单一间隙影响的线性叠加,而是复杂的非线性关系。随后,在混合间隙情况下,研究了旋转副间隙尺寸和移动副间隙尺寸对该系统动力学特性的影响,可以发现旋转副间隙对该系统动力学特性的影响比移动副间隙更明显。
参 考 文 献
[1] Flores P,Ambrósio J. Revolute joints with clearance in multibody systems[J]. Computers & Structures, 2004,82:1359-1369.
[2] Flores P. Dynamic analysis of mechanical systems with imperfect kinematic joints[D]. Guimaraes,Portugal:University of Minho,2004.
[3] Tian Q,Zhang Y,Chen L,et al. Simulation of planar flexible multibody systems with clearance and lubricated revolute joints[J]. Nonlinear Dynamics,2010,60:489-511.
[4] 郝雪清,陈江义. 不同运动副材料对间隙机构动力学特性的影响[J]. 振动与冲击,2012,31(12):19-21.
HAO Xue-qing,CHEN Jiang-yi.Effects of different materials in joints on dynamic characteristics of a mechanism with clearance[J].Joural of Vibration and Shock,2010,31(12):19-21.
[5] Ravn P.A continuous analysis method for planar multibody systems with join clearance[J]. Multibody System Dynamics,1998,2:1-24.
[6] Erkaya S,Uzmay I. Experimental investigation of joint clearance effects on the dynamics of a slider-crank mechanism[J]. Multibody System Dynamics,2011,68:1147-1155.
[7] Flores P,Hamid M.Dynamic response of multibody systems with multiple clearance joints[J].Journal of Computational and Nonlinear Dynamics,2012,031003-1.
[8] Muvengei O,Kihiu J,Ikua B.Dynamic anylysis of planar multi-body systems with LuGre friction at differently located revolute clrarance Joints[J]. Multibody System Dynamics,2012,1(1):1-16.
[9] Flores P,Ambrósio J,Claro J C P,et al,Modeling of joints with translational clearances in planar multibody systems[C]//Congresso de Métodos Computacionais em Engenharia,Laboratório Nacional de Engenharia Civil,Lisboa,Portugal,2004,18.
[10] Flores P,Ambrosio J A C,Pimenta Claro J C, et al. Translational joints with clearance in rigid multi-body system[J]. Journal of Computational and Nonlinear dynamics (ASME),2008,3:011007.
[11] Lankarani H M. A contact force model with hysteresis damping for impact analysis of multibody systems[J]. J. Mech. Des,1990,112:369-376.
[12] Ambrósio J A C. Impact of rigid and flexible multibody systems:deformation description and contact models[M]. Vol. II. Netherlands:Springer,2002.
[13] Lankarani H M. Canonical equations of motion and estimation of paramrters in analysis of impact probems[D]. Tucson.University of Arizona,1988.
Dynamic analysis of multibody systems with mixed clearance
WANG Tie-cheng1, CHEN Guo-ping1, MA Fang2, SUN Dong-yang3
(1. State Key Laboratory of Mechanics and Control of Mechanical Structures, Nanjing University of Aeronautics and Astronautics, Nanjing 210016, China;2. College of Automotive Engineering, Yancheng Institute of Industry Technology, Yancheng 224005, China;3. College of Aerospace Engineering, Chongqing University, Chongqing 400044, China)
Abstract:Here, the effects of mixed clearance on dynamic characteristics of a multibody system were studied. Firstly, the dynamical model of a multibody system including rotation clearance and translation clearance was established. Then, a slider-crank mechanism was used to analyze the effects of mixed clearance on the dynamic characteristics of the system. The results showed that the effects of mixed clearance on the slider velocity are not obvious, while its effects on the slider acceleration and the crank torque are much stronger than those of a single clearance be. The results laid a theoretical foundation for more accurate dynamic modeling of mechanical systems with clearance in engineering.
Key words:rotation clearance; translational clearance; multibody system; dynamic characteristics
基金项目:江苏高校优势学科建设工程资助项目
收稿日期:2015-03-10修改稿收到日期:2015-04-20
通信作者陈国平 男,教授,博士生导师,1956年生
中图分类号:O313.7
文献标志码:A
DOI:10.13465/j.cnki.jvs.2016.09.029
第一作者 王铁成 男,博士生,1979年生
E-mail:gpchen@nuaa.edu.cn
