
基于保护信号的隐性故障检测
2016-05-24 15:03邰能灵
电力自动化设备 2016年5期
梁 辰 ,邰能灵 ,胡 炎 ,朱 钦
(1.上海交通大学 电子信息与电气工程学院,上海 200240;2.国网上海市电力公司 市南供电公司,上海 200233)
0 引言
隐性故障即在电网故障时才表现出来的保护装置缺陷[1-3],会导致保护误动或者拒动,严重时甚至引起电网连锁故障。检测并及时处理保护隐性故障能有效提高电网运行的可靠性,是十分必要的。已有文献大多针对隐性故障造成的电网连锁故障风险进行研究。文献[4-5]通过概率统计的方法建立隐性故障造成的连锁故障概率模型。文献[6-7]提出了基于故障树等方法分析电网的连锁故障,但对保护装置中隐性故障的检测方法研究则较少[8]。
随着通信技术的发展,实时获取准确的电网信息已成为可能[9-10]。 广域测量系统(WAMS)利用相量测量单元(PMU)可同步多点测量电网的实时数据,该数据具有高采样频率、高精度等优点,同时,保护管理信息系统可以准确记录保护装置及断路器的动作信号等信息。当电网发生故障时,上述系统采集一次设备及二次设备的信息传送到调度中心,可综合用于检测隐性故障。
现有的微机保护自带自检装置,可以离线检测到一部分故障。但是保护动作原理较为复杂,各个环节之间的联系紧密,常规手段有时难以检测到某些环节缺陷。文献[11-13]提出利用保护及断路器的动作信号建立解析模型,将故障诊断规则解析化,转化为使目标函数最小化的0-1整数规划问题并优化求解,其有着严密的数学基础和理论依据。该方法能诊断出故障元件及拒动或误动的保护或断路器,但是无法检测未出口动作的后备保护或保护其他环节的隐性故障,也无法判断线路故障的范围。
本文通过构造基于保护信号的解析模型以检测隐性故障,利用保护的启动、动作信号及断路器的跳闸信号,并考虑线路的三段保护及拒动误动等较复杂情况,建立反映各信号之间关联的解析模型,基于3种信号的实际状态与期望状态的最大匹配原则,构造反映两者之间差异的目标函数,优化求解,最后根据保护的实际状态与期望状态的差异判断其是否含有隐性故障。该方法除了能有效诊断故障元件以及线路故障的基本位置,还能检测出保护的启动或出口动作方面的隐性故障,根据启动信号检测未出口动作信号的后备保护隐性故障。通过算例验证了该方法的有效性。
1 解析模型的建立
按照不同的保护要求,继电保护装置有多种类型,但是其内部基本结构类似,按功能划分一般有以下几个部分:
a.数据采集及预处理环节,采集电网一次侧的电气量并预处理;
b.测量与比较环节,故障时对电气量进行计算处理及逻辑判断;
c.启动环节,检测系统的扰动使保护启动,发出启动信号,若不满足动作条件则返回;
d.出口动作环节,发出动作信号驱动断路器跳闸。
隐性故障原因一般有以下几种:数据采集及预处理环节故障导致一次侧测量数据错误引起的误动;通信故障使信号发送失败或错误引起的误动;继电器故障导致触点常闭引起的误动;保护设置不合理引起的误动等。电网正常运行时,可以检测到数据采集及预处理环节的隐性故障[14],故障时,若主保护和断路器正确动作,则故障设备会被隔离,此时相关的后备保护也应该正确启动,如果它们未启动或错误启动,则表明保护存在隐性故障;或者相应的后备保护启动但未按照动作原理返回而发生误动,也表明保护存在隐性故障。基于保护信号来构建解析模型,可以有效检测隐性故障,现阶段可收集的信号主要包括保护启动及动作信号、断路器的跳闸信号。启动信号即保护已启动,但延时未到时保护装置发出的即时信号;动作信号即保护装置出口的动作信号,可驱动断路器跳闸,并使之发出跳闸信号。根据检测结果对保护装置进行检修,排除隐性故障,能有效避免连锁故障。
多数文献仅使用主保护和后备保护的动作信号进行解析,诊断故障元件及保护或断路器的拒动或误动情况,未充分利用保护的其他信号。而且在实际的运行中,线路会采用三段保护结合其他保护等较为复杂的配置,关于这方面的研究较少。本文将保护分为线路保护(三段保护配合纵联保护)及其他元件保护(母线保护、变压器保护等),分别针对以上保护的动作及启动信号、断路器的跳闸信号建立解析模型。
1.1 故障区域的识别
电网实际运行时,单一元件故障较为频繁,若保护装置和断路器正确动作切除故障,则过程简单,结果准确。但当保护装置含有隐性故障时,会发生误动或拒动,动作情况更为复杂,故障区域也会相应扩大。建立解析模型首先要确定故障区域,现有研究根据断路器的带电状况能准确识别故障边界,形成故障区域,为构造解析模型建立良好的基础[13,15]。本文考虑到远后备保护的启动情况,将故障区域边界向下级线路延伸一级,以检测启动信号。
故障区域确定后,设:其中共有M个可能发生故障的元件,构成元件集合 S={s1,s2,…,sM};N 条可能发生故障的线路,为了方便描述,将第n条线路分为3段 pn1、pn2、pn3,构成线路集合 P={p11,p12,p13,…,pN1,pN2,pN3}。采用这种线路划分方法,可以在诊断结果中判断出线路故障的位置。定义sm取1和0时分别表示S中第m个元件故障和正常;pnt取1和0时分别表示P中第n条线路的第t(t=1,2,3)段故障和正常。
设上述线路和元件共配置D个保护,保护动作信号构成的集合为 R={r1,r2,…,rd,…,rD},rd取 1 和 0时分别表示R中第d个保护动作和未动作;保护启动信号构成的集合为 A={a1,a2,…,ad,…,aD},ad取 1和0时分别表示A中第d个保护启动和未启动;故障后与停电设备相关的所有Q个断路器的跳闸信号构成的集合为 C={c1,c2,…,cq,…,cQ},cq取 1 和 0 时分别表示C中第q个断路器跳闸和未跳闸。
根据继电保护原理,在解析模型中,故障后保护或者断路器做出的正确动作响应,称作动作期望[12],表现为相应的信号期望,即保护的启动信号期望A*、动作信号期望R*以及断路器的跳闸信号期望C*。
在本文的解析模型中,v表示线路的纵联保护;x、y、z分别表示线路的Ⅰ、Ⅱ、Ⅲ段保护;i表示元件的主保护;j表示元件的第一后备保护;l表示元件的第二后备保护;k表示断路器失灵保护;在各线路及元件的解析模型中,⊗、⊕、-分别表示逻辑运算的与、或、非,若不影响表达,⊗可省略。
1.2 线路保护动作信号解析模型
线路保护采用三段保护与纵联保护配合,纵联保护在线路两端安装,三段保护在线路靠近电源的一侧安装,若是双端电源线路,则两侧均需要安装。线路保护范围划分如图1所示。以L1为例,D、E侧一般采用相同的保护,保护范围也一致,一般为线路全长的80%。根据继电保护装置已设定的三段保护范围,将线路 L1分为 p11、p12、p133 段,则 D 侧Ⅰ段保护范围为p11+p12,E侧Ⅰ段保护范围为p12+p13。Ⅱ段保护范围为本线路的全长及相连的母线,为保证线路的全长均得到保护,保护的范围会相应延伸到下级线路,但延伸长度并不确定,因此这部分不考虑在内。同理,Ⅲ段保护范围为本线路及下级线路的全长及相连母线。纵联保护作为主保护,保护本线路的全长。根据各保护的保护范围、配置规则以及保护动作原理,形成解析模型。
图1 线路保护范围划分Fig.1 Range partition of line protection
a.主保护。
设线路L1的纵联保护动作信号为r1v,当L1上发生故障时,纵联保护应该动作,其动作信号期望为:

b.Ⅰ段保护。
设线路L1的D侧Ⅰ段保护动作信号为r1x,当故障发生在第1、2段线路时,则Ⅰ段保护应动作,其动作信号期望为:

c.Ⅱ段保护。
设线路L1的D侧Ⅱ段保护动作信号为r1y,保护本线路全长及母线E。当故障发生在本线路时,若对应线路D侧的Ⅰ段保护及纵联保护未动作,则Ⅱ段保护应动作;或者当故障发生在末端母线E时,若母线主保护未动作,则Ⅱ段保护应动作,动作信号期望为:

其中,r1v为线路L1的纵联保护信号。
d.Ⅲ段保护。
设线路L1的D侧的Ⅲ段保护动作信号为r1z,当故障发生在本线路时,若对应线路D侧的Ⅰ段保护、Ⅱ段保护及纵联保护均未动作,则Ⅲ段保护应动作;或者当故障发生在下级线路 L2(或 L3、L4)时,Ⅲ段保护到故障线路之间的关联路径上的全部断路器都处于闭合状态,则Ⅲ段保护应动作;或者当故障发生在母线E(或F)时,母线主保护及相应的Ⅱ段保护均未动作,则Ⅲ段保护应动作,动作信号期望为:

其中,iq为第i条下级线路故障时,该线路上第q个断路器的跳闸情况。
1.3 元件保护及断路器动作信号的解析模型
元件保护主要包括母线保护、变压器保护、发电机保护等,以下对各种类型的保护动作情况分别进行讨论。
a.主保护。
设S中第m个元件sm的主保护动作信号为rmi,如sm故障,则主保护动作,动作信号期望为:

b.第一后备保护。
设元件sm的第一后备保护动作信号为rmj,如果sm故障且主保护拒动,则第一后备保护动作,动作信号期望为:

c.第二后备保护。
设元件sm的第二后备保护动作信号为rml,第二后备保护保护元件为sm及其相邻的元件sx,如果sm故障且其主保护和第一后备保护未动作,则第二后备保护动作;或者当故障发生在相邻元件sx,且第二后备保护到sx的关联路径上的全部断路器都处于闭合状态,则第二后备保护动作,动作信号期望为:

其中,∑表示逻辑连⊕运算;Π表示逻辑连 ⊕运算;M(rml,sm)为在保护 rml范围内元件sm的所有相邻元件集合;Q(rml,sx)为保护 rml到 sx关联路径上的全部断路器的集合。
d.断路器失灵保护。
220 kV及以上电压等级的电网中一般配置专门的断路器失灵保护。设rqk为第q个断路器的断路器失灵保护的动作信号,rp为可驱动断路器跳闸的保护动作信号,cq为断路器跳闸信号。当保护动作并驱动断路器跳闸时,若断路器未动作,则断路器失灵保护动作,动作信号期望为:

其中,D(cq)为能驱动断路器cq跳闸的全部保护集合。
e.断路器动作。
任何能够驱动断路器跳闸的保护动作,断路器都应该跳闸,动作信号期望为:

1.4 保护启动信号的解析模型
故障发生后,只要在保护范围内,相应的Ⅰ、Ⅱ、Ⅲ段保护,或者主保护后备保护均要启动。若继电保护装置含有隐性故障,可能会造成保护不能及时启动或者错误启动,以下对各种类型的保护启动信号解析模型分别进行讨论。
a.纵联保护启动。
设线路L1的纵联保护的启动信号为a1v,纵联差动保护作为L1的主保护保护线路全长,故障发生在L1的任何位置,纵联差动保护均应该启动,启动信号期望为:

b.Ⅰ段保护启动。
设线路L1Ⅰ段保护的启动信号为a1x,故障发生在Ⅰ段保护范围内就应该启动,启动信号期望为:

c.Ⅱ段保护启动。
设线路L1Ⅱ段保护的启动信号为a1y,故障发生在Ⅱ段保护范围内就应该启动,启动信号期望为:

d.Ⅲ段保护启动。
设线路L1Ⅲ段保护的启动信号为a1z,Ⅲ段保护作为本线路的近后备及下级线路的远后备,在本线路及与本线路连接的任一下级线路发生故障时均需要启动,启动信号期望为:
其中,N为下级线路物数目。
e.其他元件保护启动。
设元件sm的主保护的启动信号为ami,第一后备保护的启动信号为amj,第二后备保护的启动信号为aml,当设备发生故障时,主保护及第一、第二后备保护均需要启动,启动信号期望分别为:

f.断路器失灵保护启动。
设第q个断路器失灵保护的启动信号为aqk,当有启动断路器的任一保护动作,断路器失灵保护均需启动,启动信号期望为:

1.5 拒动及误动的解析模型
在上述保护和断路器解析模型的基础上,加入保护(断路器)的误动(用f表示)或者拒动(用g表示)情况。对于保护(断路器)的动作信号集合{r1,r2,…,rd,…,rD}({c1,c2,…,cq,…,cQ}),如果 rd=1,第d 个保护的动作信号期望,则保护(断路器)误动,frd=1(fcq=1),否则 frd=0(fcq=0);如果 rd=0,则保护(断路器)拒动,grd=1(gcq=1),否则 grd=0(gcq=0);如果,或者,则保护(断路器)正确动作。考虑到保护的拒动问题,当元件或线路发生故障时,保护启动但未动作,或保护未启动,均表示保护未动作。
根据保护和断路器的期望状态与实际状态的对比,分析得出保护和断路器的拒动和误动情况,并对矛盾的动作逻辑进行约束,矛盾的动作逻辑包括:保护动作但未启动,保护(断路器)误动又拒动,有动作期望又误动,无动作期望又拒动,未动作又误动,已动作又拒动。将矛盾的动作逻辑进行约束,用逻辑方程可以表示为:
2 隐性故障检测
采用基于保护信号解析模型的隐性故障检测方法,将解析模型的问题转换成最能解释实际保护(断路器)动作情况的0-1整数规划问题,优化目标函数进行故障诊断,并通过比较保护期望状态与实际状态的差别,确定不正确启动或动作的保护,检测含有隐性故障的保护装置。
2.1 目标函数
首先确定目标函数E(H),目标函数越小表示保护与断路器的实际情况与期望情况越接近,目标函数的逻辑约束如1.5节所述,目标函数E(H)为:
其中,D 为保护数量;Q 为断路器的数量;为D个保护的启动期望状态与实际状态之间的差异;为D个保护的动作期望状态与实际状态的差异为Q个断路器的跳闸期望状态与实际状态的差异表示保护和断路器拒动、误动的情况,在优化过程中,误动或拒动的保护和断路器总数越少,目标函数越小,优化结果越明显;由于启动的保护数量远多于动作的数量,应适当减小启动状态在目标函数中的相对权重,设w为启动的相对权值,为(0,1)范围内的实数,w1、w2分别表示保护和断路器的误动、拒动的相对权值。
2.2 隐性故障检测流程
本文采用粒子群优化算法求解目标函数,最优粒子为 H(S,P,A,R,C,F,G),H 中的 S、P 为故障诊断结果,即发生故障的元件和线路;F、G为保护与断路器的动作评价。通过诊断结果检测保护的实际状态与期望状态的差异,可以确定没有正确启动或动作,或者信息上传有误的保护含有隐性故障。
根据上文的建模和求解思路,检测流程如图2所示,通过保护管理信息系统采集电网中保护的配置规则及保护范围,建立解析模型,当故障发生时,利用该方法进行故障诊断及隐性故障的检测,在调度中心建立隐性故障检测系统。
图2 故障诊断及隐性故障检测流程图Fig.2 Flowchart of fault diagnosis and hidden failure detection
3 算例分析与验证
以图3所示的测试系统为例,系统中元件、保护及断路器的数量如下。
a.20 个设备,包括 4 台发电机 G1、G2、G3、G4,4台变压器 T1、T2、T3、T4,8 条母线 A1、A2、…、A8及 4 条线路 L1、L2、L3、L4。
b.20 个断路器 QF1、QF2、…、QF20。
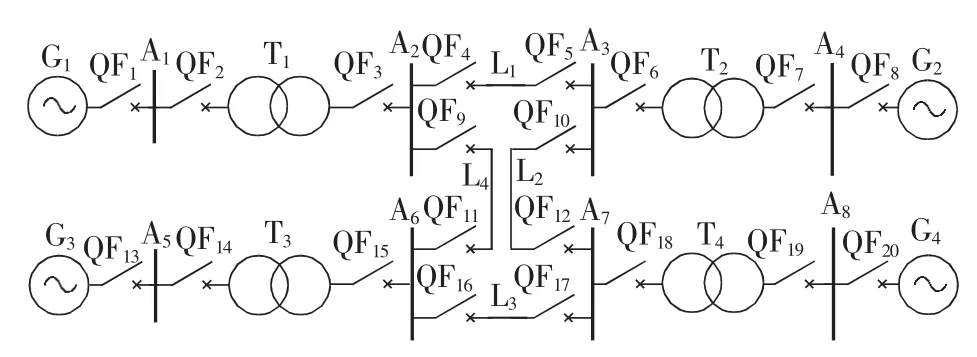
图3 测试系统Fig.3 Test system
c.76 个保护,包括 20 个主保护 G1i、G2i、G3i、G4i、T1i、T2i、T3i、T4i、A1i、A2i、 … 、A8i、L1v、L2v、L3v、L4v,12 个 后备 保 护 G1j、G2j、G3j、G4j、T1j、T2j、T3j、T4j、T1l、T2l、T3l、T4l;20个断路器失灵保护 QF1k、QF2k、…、QF20k;每条线路都是双端电源线路,两侧均配置三段保护,因此有8个Ⅰ段保护 L1x、L1x′、L2x、L2x′、L3x、L3x′、L4x、L4x′,8 个Ⅱ段保护 L1y、L1y′、L2y、L2y′、L3y、L3y′、L4y、L4y′,8 个Ⅲ段 保 护 L1z、L1z′、L2z、L2z′、L3z、L3z′、L4z、L4z′。 其中,G 表示发电机或者发电机的保护;T表示变压器或者变压器的保护;A表示母线或者母线的保护;L表示线路或者线路的保护;B表示断路器或者断路器的失灵保护;x与x′分别表示线路两端的Ⅰ段保护,y与y′分别表示线路两端的Ⅱ段保护,z与z′分别表示线路两端的Ⅲ段保护,x、y、z 为顺时针方向的保护,x′、y′、z′为逆时针方向的保护。
3.1 算例1
设线路L3发生故障,上传的保护和断路器实际动作为:线路L3的主保护L3v拒动,L3x动作,跳开断路器 QF17,L3x′、L3y′、L3z′拒动,相邻线路的Ⅲ段保护 L4z′动作,跳开断路器QF9,变压器第二后备保护T3l动作,跳开断路器QF14。
上传的保护启动信号为:L3v、L3x、L3y、L3z、L2z、L4z′、T3l、T4l、QF9k、QF14k、QF17k。
根据断路器的跳闸信号,且故障区域边界向下级线路延伸一级,故障区域包含的可疑故障元件有 L1、L2、L3、L4、A2、A5、A6、A7、T1、T3、T4、G3,对应于S={s1,s2,…,s8};P={p11,p12,p13,p21,p22,p23,p31,p32,p33,p41,p42,p43};断路器有 15 个,分别是 QF2、QF3、QF4、QF5、QF9、QF10、QF11、QF12、QF13、QF14、QF15、QF16、QF17、QF18、QF19,对应的断路器跳闸信号 C={c1,c2,…,c15}。线路保护有 28 个,分别是线路 L1、L2、L3、L4的纵联保护及三段保护L1v、L1x(x′)、L1y(y′)、L1z(z′)、L2v、L2x(x′)、元件主保护有 8 个 ,分别是 A2i、…、A7i、T1i、…、T4i、G3i;元件的后备保护有 7 个,分别是 T1j、T2j、T3j、T4j、G3j、T1l、T2l、T3l、T4l。 断路器失 灵保护有 6 个,分别是QF9k、…、QF17k,对应的实际保护动作信号 R={r1,r2,…,r49},保护启动信号 A={a1,a2,…,a49};目标函数E(H)中,w=0.25,w1=1.5,w2=0.75。
采用离散粒子群优化算法求解,则目标函数的最小值 E(H*)=5.75,最优粒子为 H*,其中,S={0,0,0,0,0,0,0,0},P={0,0,0,0,0,0,1,0,0,0,0,0}。 则诊断结果为:线路L3的p31段发生故障,线路Ⅰ段保护L3x动作,线路L4Ⅲ段保护L4z′动作,变压器 T3第二后备保护 T3l动作,断路器 QF9、QF11、QF14跳闸,拒动的保护有 L3v、L3y′、L3z′。 通过对比 a 与 A*,得出保护启动的差异:实际状态下线路L3左侧的Ⅱ、Ⅲ段保护未启动,期望状态下Ⅱ、Ⅲ段保护应启动。由此可得,L3左侧的Ⅲ段保护启动部分可能含有隐性故障,导致保护未启动或启动信号未上传。
3.2 算例2
设变压器T1发生故障,上传的保护和断路器实际动作为:变压器主保护T1i拒动,第一后备保护T1j动作,跳开断路器QF2,断路器QF3拒动,断路器失灵保护 QF3k动作,跳开断路器 QF4、QF9,Ⅲ段保护 L4z动作,跳开断路器QF11。
上传的保护实际启动信号为:T1j、T1l、QF2k、QF3k、QF11k、L4z、L1z′。
同理,故障区域包含的可疑元件有 A1、A2、A6、T1、T3、G1、L1、L3、L4, 对 应 于 S={s1,s2, … ,s6},P={p11,p12,p13,p21,p22,p23,p31,p32,p33,p41,p43,p43};断路器有 QF1、QF2、QF3、QF4、QF5、QF9、QF11、QF14、QF15、QF16、QF17,对应于 C={c1,c2,…,c11};线路保护有 12 个,分别是L1、L3、L4的纵联保护及三段保护 L1v、L1x(x′)、L1y(y′)、L1z(z′)、L2v、L2x(x′)、L2y(y′)、L2z(z′)、L3v、L3x(x′)、L3y(y′)、L3z(z′)、L4v、L4x(x′)、L4y(y′)、L4z(z′);元件主保护有 6 个,分别是 A1i、A2i、A6i、T1i、T3i、G1i;元件的后备保护 5 个,分别是 T1j、T3j、G1j、T1l、T3l;断路器失灵保护有 3 个,分别是 QF2k、QF3k、QF11k;对应的保护动作信号 R={r1,r2,…,r26},保护启动信号A={a1,a2,…,a26}。 目标函数 E(H)中,w=0.25,w1=1.5,w2=0.75。
采用离散粒子群优化算法求解,目标函数最小值E(H*)=6.25,最优粒子为 H*,其中,S={0,0,0,1,0,0},P={0,0,…,0}。 则诊断结果为:变压器 T1发生故障,第一后备保护T1j动作,断路器失灵保护QF3k动作,Ⅲ段保护 L4z动作,断路器 QF2、QF4、QF9、QF11跳闸,拒动的保护有T1i,误动的保护有L4z。通过对比a与A*,r与R*,得出保护启动与动作的差异:实际状态下变压器T1的主保护未启动,第一、第二后备保护启动,期望状态下主保护与第一、第二后备保护均启动;实际状态下L4的Ⅲ段保护启动并动作,期望状态下L4的Ⅲ段保护启动但未动作。由此可得,变压器 T1的主保护启动部分可能含有隐性故障,导致主保护未启动或启动信号未上传;L4的Ⅲ段保护可能含有隐性故障,导致Ⅲ段保护误动。
4 结论
电网可提供精确度较高的多种信息用于隐性故障检测,本文加入了保护的启动信号,考虑了故障元件、保护启动、保护动作和断路器跳闸的关联性,并针对三段保护等较复杂情况,提出一种基于保护信号解析模型的隐性故障检测方法。该方法利用一次设备及二次设备提供的信息,根据保护和断路器的动作原理及配置规则构建解析模型,并建立目标函数,利用粒子群优化算法进行求解,得到故障诊断结果。并通过保护信号期望状态与实际状态的差异确定含有隐性故障的保护装置。算例表明,该隐性故障检测方法有较强的实用性,可在故障诊断的同时检测保护装置的隐性故障。
[1]ELIZONDO D C,de la REE J,PHADKE A G,et al.Hidden failures in protection systems and their impact on wide-area disturbances[C]∥Power Engineering Society Winter Meeting,2001. [S.l.]:IEEE,2001:710-714.
[2]王涛,王兴武,顾雪平,等.基于概率及结构重要度的电力系统事故链模型与仿真[J].电力自动化设备,2013,33(7):51-56.WANG Tao,WANG Xingwu,GU Xueping,et al.Power system faultchain modeland simulation based on probability and structural importance[J].Electric Power Automation Equipment,2013,33(7):51-56.
[3]曹一家,陈晓刚,孙可.基于复杂网络理论的大型电力系统脆弱线路辨识[J]. 电力自动化设备,2006,26(12):1-5,31.CAO Yijia,CHEN Xiaogang,SUN Ke.Identification of vulnerable lines in power grid based on complex network theory[J].Electric Power Automation Equipment,2006,26(12):1-5,31.
[4]熊小伏,蔡伟贤,周家启,等.继电保护隐藏故障造成输电线路连锁跳闸的概率模型[J].电力系统自动化,2008,32(14):6-10.XIONG Xiaofu,CAIWeixian,ZHOU Jiaqi,etal.Probabilistic model for transmission lines cascading trips caused by hidden failures in relay protection[J].Automation of Electric Power Systems,2008,32(14):6-10.
[5]易俊,周孝信.考虑系统频率特性以及保护隐藏故障的电网连锁故障模型[J].电力系统自动化,2006,30(14):1-5.YI Jun,ZHOU Xiaoxin.Cascading failure model of power grids considering frequency response characteristics and hidden failures[J].Automation of Electric Power Systems,2006,30(14):1-5.
[6]占勇,程浩忠,熊虎岗.电力网络连锁故障研究综述[J].电力自动化设备,2005,25(9):93-98.ZHAN Yong,CHENG Haozhong,XIONG Hugang.Review of cascading failures in electric power network[J].Electric Power Automation Equipment,2005,25(9):93-98.
[7]周宗发,艾欣,邓慧琼,等.基于故障树和模糊推理的电网连锁故障分析方法[J].电网技术,2006,30(8):86-91.ZHOU Zongfa,AIXin,DENG Huiqiong,etal.A method to analyze power system cascading failure based on fault tree and fuzzy reasoning[J].Power System Technology,2006,30(8):86-91.
[8]李博通,李永丽,姚创,等.继电保护系统隐性故障研究综述[J].电力系统及其自动化学报,2014,26(7):34-39.LI Botong,LI Yongli,YAO Chuang,et al.Overview of research on hidden failures in protection system[J].Proceedings of the CSUEPSA,2014,26(7):34-39.
[9]鞠平,郑世宇,徐群,等.广域测量系统研究综述[J].电力自动化设备,2004,24(7):37-40,49.JU Ping,ZHENG Shiyu,XU Qun,et al.Survey of wide area measurement system[J].Electric Power Automation Equipment,2004,24(7):37-40,49.
[10]徐岩,张晓明,吴卓娟,等.基于故障录波与保护信息融合的变电站故障分析系统开发[J].电力自动化设备,2011,31(1):118-121,125.XU Yan,ZHANG Xiaoming,WU Zhuojuan,et al.Substation fault analysissystem based on integration offaultrecordsand protection information[J].Electric Power Automation Equipment,2011,31(1):118-121,125.
[11]郭文鑫,文福拴,廖志伟,等.计及保护和断路器误动与拒动的电力系统故障诊断解析模型[J].电力系统自动化,2009,33(24):6-10.GUO Wenxin,WEN Fushuan,LIAO Zhiwei,et al.An analytic model for power system fault diagnosis with malfunctions of protective relays and circuit breakers taken into account[J].Automation of Electric Power Systems,2009,33(24):6-10.
[12]刘道兵,顾雪平,李海鹏.电网故障诊断的一种完全解析模型[J].中国电机工程学报,2011,31(34):85-93.LIU Daobing,GU Xueping,LI Haipeng.A complete analytic model for fault diagnosis of power systems[J].Proceedings of the CSEE,2011,31(34):85-93.
[13]董明,张勇,张岩,等.含电气量信息的电力系统故障诊断解析模型[J]. 电力系统自动化,2013,37(6):55-62.DONG Ming,ZHANG Yong,ZHANG Yan,et al.An analytic model for power system fault diagnosis employing electrical data[J].Automation of Electric Power Systems,2013,37(6):55-62.
[14]熊小伏,刘晓放.基于WAMS的继电保护静态特性监视及其隐藏故障诊断[J].电力系统自动化,2009,33(9):6-10.XIONG Xiaofu,LIU Xiaofang.Monitoring of static characteristics and diagnosis of hidden failures in protection system based on WAMS[J].Automation of Electric Power Systems,2009,33(9):6-10.
[15]周宏,李强,林涛,等.基于 WAMS量测数据的电网扰动和操作类型识别[J].电力自动化设备,2011,31(2):7-11.ZHOU Hong,LI Qiang,LIN Tao,et al.Power system disturbance and operation identification based on WAMS[J].Electric Power Automation Equipment,2011,31(2):7-11.
猜你喜欢
汽车工程师(2021年12期)2022-01-17
现代畜牧科技(2021年4期)2021-07-21
甘肃教育(2020年2期)2020-09-11
冰雪运动(2020年2期)2020-08-24
电子制作(2018年14期)2018-08-21
电子制作(2018年10期)2018-08-04
冰雪运动(2018年6期)2018-05-23
电子制作(2017年8期)2017-06-05
电子制作(2017年20期)2017-04-26
新高考·高一数学(2016年3期)2016-05-19
