北斗卫星在渔船定位系统中的应用
2016-05-06 08:59:51刘娜
潍坊工程职业学院学报 2016年1期
关键词:渔船
刘 娜
(辽宁机电职业技术学院 信息系,辽宁 丹东 118009)
北斗卫星在渔船定位系统中的应用
刘娜
(辽宁机电职业技术学院 信息系,辽宁 丹东118009)
摘要:渔船过去使用的是GPS卫星定位,一旦遇险船长难以根据定位系统报告自身位置,给救助带来了不便。GPS完全受美国军方控制,经常在接收区域里增加干扰并降低准确度。针对这种情况,本文设计了成本低的北斗卫星实时定位显示系统,用于渔船定位,保障航行安全。北斗系统具有独特的三频信号、短报文通信服务、高定位精度等特点,渔港监督部门可以非常直观地了解到目前渔船所处的位置,一旦渔船遇险,可以通知离其最近的渔船参与救援,提高了安全性。
关键词:渔船;北斗卫星;实时定位;显示系统
继美国的全球定位系统、俄罗斯的格洛纳斯之后,北斗卫星导航系统是我国自主研制,世界上第三个投入运营的卫星定位系统。它具有双向通信、实时导航、精密授时等特点,已经广泛应用于国防、通信、经济生活多个领域。之前全球卫星定位技术作为监控实现的关键技术在相当长的一段时间内都被美国垄断。我国每年仅在购买GPS卫星导航终端设备方面都要花费大量的外汇。另外在很多涉及到信息技术的产业和领域,需要拥有自主知识产权的技术支撑。因此,北斗卫星导航定位系统具有极其重要的战略意义。本研究基于北斗卫星系统设计了一个北斗卫星显示系统,系统安装在出海的渔船上,使用效果良好[1]。
1北斗卫星显示系统功能要求
北斗卫星导航系统计划由35颗卫星组成,目前已经发射了20颗。随时有4颗卫星就可以对目标进行定位。众多电子产品正将北斗系统应用于交通运输、水文监测、气象测报、森林防火、电力调度、通信授时、减灾救灾等诸多领域。现在正在服役的“北斗一号”卫星定位系统的三颗卫星都定位在距地面36000km的地球同步轨道上,而美国的GPS由24颗卫星组成,这些卫星距地面的高度均为20000km。
北斗定位系统由中国自主建设,包括空间段、北斗地面段和用户终端三部分组成。空间段主要包括5颗静止轨道卫星和30颗非静止轨道卫星组成。地面段主要包括主控站、测轨站和计算中心等,主要用来控制和校正卫星运行参数,并完成对用户定位信息的解算。用户终端由北斗用户终端或者GPS等其他卫星导航系统兼容的终端组成。
在实际应用中,用户终端收到轨道卫星的信号后,经过解调输出标准格式的定位数据,该数据必须经过处理后才能在LCD屏幕上显示。本系统主要是关于用户终端的设计,由单片机、LCD显示模块、北斗定位模块、串口模块、报警模块等组成。能实时显示经纬度、时间和椭球高等信息[2]。
2北斗卫星显示系统硬件设计
系统示意图如图1所示,用户终端系统的框图如图2所示。系统硬件电路主要由单片机模块、液晶显示模块、USB转串口模块、北斗模块和电源模块等组成。系统以MSP430单片机为核心控制器件,使用串口和北斗定位模块UM220通信,接收北斗模块输出的信息,再将收到的信息处理后显示到LCD上。通过键盘可以设计报警区,当出现报警情况时,进行声光报警,并且将报警信息显示在LCD屏幕上。

图1 北斗卫星显示系统示意图
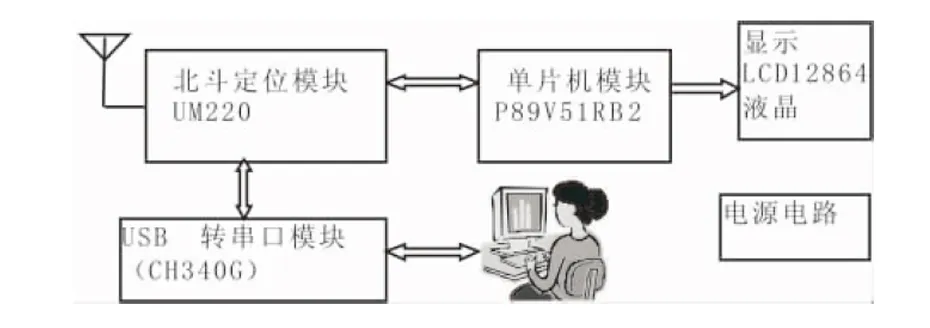
图2 北斗卫星系统硬件原理图
2.1北斗定位模块UM220简介
UM200是和芯星通科技生产的,包括导航、监控应用功能的BDS/GPS双模定位模块。它是该系列模块的第三代产品,是目前市场上尺寸最小、完全国产化的BDS/GPS模块,集成度高、低功耗,易于应用,具有出色的导航、定位和授时功能,非常适合车辆监控、气象探测和电信电力授时等领域的应用需求[3]。
(1)模块特点:
模块有两种定位模式:DB2或GPS系统单独定位,BD2与GPS系统混合定位;2个频点BD2 B1和GPS L1;有UART、事件输入、SPI、1PPS和I2C接口;定位时间重捕获<1s,冷启动为35s ,热启动1s;空位精度为3m;速度精度为0.1m/s;电压为直流3.0-3.6V;功能350mW;天线输入阻抗为50欧,增益为15-50dB。
(2) 模块引脚定义
引脚如图3所示,有3个可以配置的串口,默认波特率是9600bps。
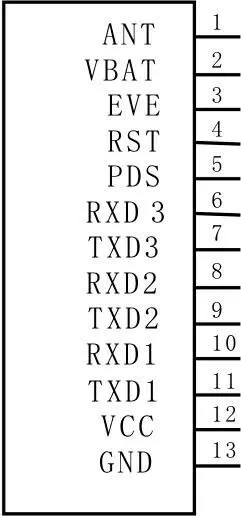
图3 北斗UM220模块引脚图
(3)UM220模块输出信息格式
UM220模块默认状态下是GPS和BD2双系统卫星联合定位,所以模块数据输出格式兼容国家海洋电子协会的NEMA-0183通信标准格式。数据以ASCII码格式输出,速率可以设置。
输出的消息语句包括GGA、GLL、GSA、GSV 、RMC、VGT等,在本设计中单片机主要采集RMC和GGA消息语句,从中解析出经纬度、时间、椭球高等信息进行显示。当进入到用户设置的报警区,进行声光报警。下面以GGA语句为例,详细说明语句含义。其它的语句说明参见UM220的软件接口协议。
GGA消息语句的格式如下:
$——GGA,<参数1>…<参数13>*hh
各参数说明如下:消息名为GGA;参数1:UTC时间格式;参数2:北纬或南纬指示;参数3:经度;参数4:经度;参数5:东经或西经;参数6:定位状态标识;参数7:参与定位的卫星数;参数8:水平精度因子;参数9:椭圆高;参数10:椭圆高单位;参数11:海平面分离度;参数12:海平面分离度单位,固定为M;参数13:差分校正时延,单位为秒,非差分定位时为空;参数14:参考站ID,非差分定位时为空;*hh为校验和。
例如实时收到一条GGA消息如下:
$GNGGA,010123.000,3142.184723,N,11852.797414,E,1,08,1.217,23.640,M,0,M,,*5B
从这条消息可解析出的信息:系统为GPS和BD2混合定位模式,UTC时间为01时01分23秒,北纬31°42.184723′,东经118°52.797414′,单点定位,参与卫星数量8颗,椭圆高为23.640M,校验和为5BH。
系统主要提供三种服务:定位,通信,授时。

图4UM220模块原理图
电路原理如图4所示。北斗UM220定位模块包括3个串口,通过串口2连接单片机的串口,单片机接收UM220的信息,经过解析后在LCD屏幕上显示[4]。
2.2电源模块
整个系统需要3.3V电压,电源转换芯片按照供电要求采用7136-1芯片,该芯片可通过调整输出3.3V电压,输出最大电流达到3A,能满足所有模块的供电要求。电源原理图如图5所示。
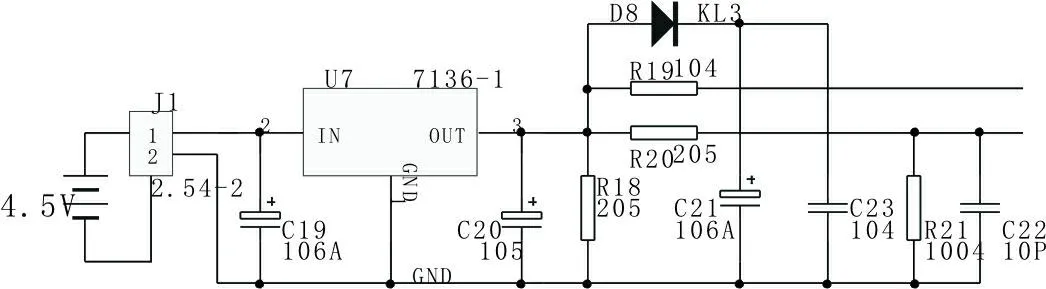
图5电源原理图
2.3USB接口模块
CH340G是一个USB总线转串口的芯片,具有硬件全双工串口,内置收发缓冲区,支持的通信波特率为50bps-2Mbps。通过外加电平转换器,可以提供RS232、RS485、RS422等接口。支持5V和3.3V电源,原理图如6所示。CH340G串口与UM220的串口1连接。电脑安装了上位机软件后,可以通过USB对UM220进行参数设置,同时也可实时监测UM220输出的实时信息,转换电路如图6所示。
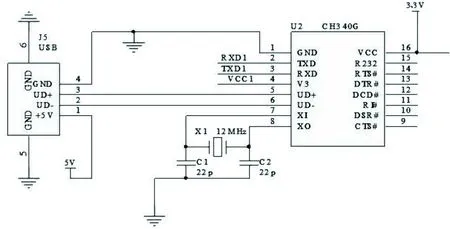
图6 USB串口转换电路
2.4液晶模块
显示屏为内嵌中文字库的12864液晶显示屏,单片机和液晶显示屏之间采用并行连接,液晶屏的引脚D0-D7连到单片机的P0口。12864液晶显示采用并行控制方式,LCD_RS为数据/命令选择端,LCD_RW为读写选择端,LCD_EN为使能端,LCD_PSB为并行/串行选择端,LCD_RST为复位端。可调电阻RX1和电阻R1、R2为调节液晶显示背光和对比度。电路原理图如图7所示。
2.5单片机模块
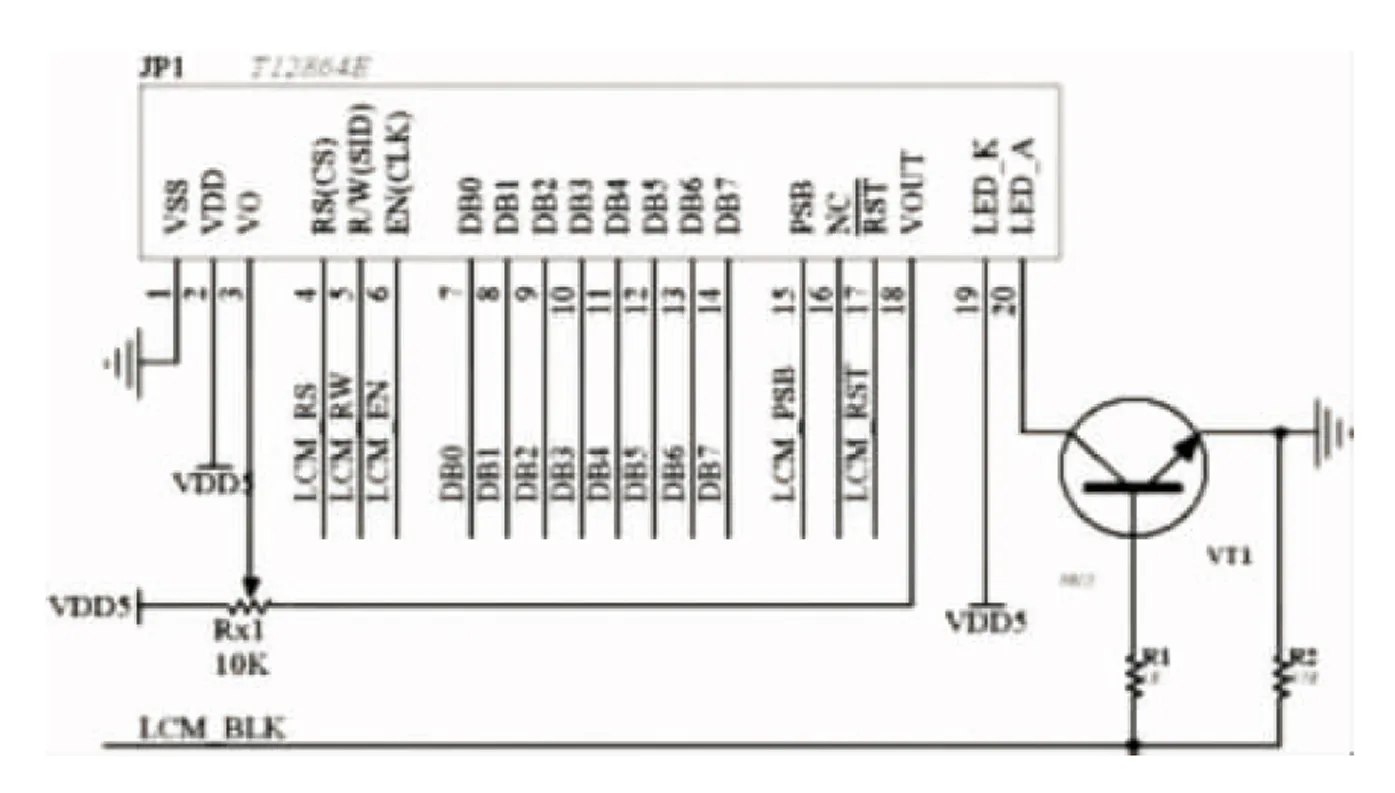
图7 液晶电路原理图
单片机控制模块完成系统的控制处理功能,主要实现对数字外设的控制、将北斗导航接收模块接收到的定位信息进行采集、处理并将其发送给液晶显示模块,控制液晶显示模块实时显示定位信息。本设计的单片机控制模块为80C51系统微控制器的P89V51RB2,包含16Flash和1024字节的数据RAM。
该芯片可以使用X2方式的时钟频率运行,选择X2方式可在相同时钟频率下获得2倍的吞吐量。从该特性获益的另一种方法是将时钟频率减半而保持特性不变,这样可以极大地降低电磁干扰(EMI)。
北斗系统由单片机控制,通过串行口进入计算机中。计算机的虚拟机中使用嵌入式linux,使用QT软件设计北斗显示系统接收数据画面。通过程序移植到G6410ARM实验板,可以放在任何需要定位的环境。
3系统控制程序设计
程序分单片机部分和计算机显示部分。其中单片机的系统软件工作流程:系统初始化,显示开机画面,串行接收北斗模块数据,从接收的数据解析出所需要的信息,显示更新。系统软件由主程序、消息语句接收与处理子程序、显示子程序组成。
3.1单片机软件设计
系统软件工作流程如图8所示。系统初始化,显示开机画面,串行接收北斗模块数据,从接收的数据解析出所需要的信息,显示更新。系统软件由主程序、消息语句接收与处理子程序、显示子程序组成。消息语句接收流程图如图9。
3.2QT软件设计
单片机控制北斗模块,通过串行口将数据送入计算机中。计算机需要成功搭建嵌入式系统软平台,使用的是嵌入式Linux,装载北斗驱动程序、在QT图形界面的设计北斗/GPS定位程序。QT是嵌入式Linux主流的GUI设计系统,是专门为嵌入式系统设计图形用户界面的工具包。

图8北斗定位显示系统主程序框图

图9 消息语句接收流程图
QT应用程序的开发过程是新建项目文件,使用QT Designer设计界面元素,然后切换到main.cpp文件中书写源程序,发布执行文件,新建北斗系统启动器和显示图标,最后编译与仿真。
4实验数据
计算机里QT软件制作的北斗系统,程序可以移植到ARM6410实验板中,显示界面如图12所示。
图10北斗定位显示界面
实验证明,北斗系统显示当前位置的经度是101.7652,纬度是24.1875。谷歌地球显示当前位置是经度:101.7443;纬度:24.2121。因此本设计的北斗显示系统可以实现准确定位。
参考文献:
[1] 夏文海.北斗卫星在浙江省渔船安全救助信息系统中的应用[J]. 海洋信息,2009, 202(4): 5-8.
[2] 王宝平,余江鑫,陈卫强.北斗二代导航接收机的卫星导航系统设计[J]. 单片机与嵌入式系统应用,2013,13(7):40-43.
[3] 耿大威.基于北斗_GPS双模卫星定位系统的车载终端设计[D].青岛:中国海洋大学硕士论文,2013:24-36.
[4] 郭锦富.应用北斗卫星系统建设南沙渔船船位监控系统[J].卫星与网络,2008,74(7):48-50.
(责任编辑:刘学伟)
中图分类号:TN967.1
文献标志码:A
文章编号:1009-2080(2016)01-0083-04
作者简介:刘娜(1967-),女,辽宁丹东人,辽宁机电职业技术学院副教授,工程硕士。
基金项目:辽宁机电职业技术学院2016年度院级教研课题“基于电子产品的单片机实训室建设与研究”。
收稿日期:2016-01-04
doi:10.3969/j.issn.1009-2080.2016.01.021
猜你喜欢
作文小学高年级(2023年5期)2023-09-06 19:57:41
廉政瞭望(2021年15期)2021-08-23 04:55:22
商周刊(2018年19期)2018-12-06 09:49:41
小学科学(学生版)(2016年5期)2016-12-05 11:02:11
渔业致富指南(2016年12期)2016-11-11 07:07:22
船海工程(2015年4期)2016-01-05 15:53:28
小雪花·成长指南(2015年12期)2015-12-28 09:03:49
制冷学报(2014年6期)2014-03-01 03:07:39