
汽车A柱盲区消除系统设计
2016-04-28 23:32张博化有为于丽
科技传播 2016年7期
张博+化有为+于丽
摘 要 本次作品的设计思路主要是通过摄像头采集车外路况影响,通过数据线路传输到车内显示器中,再由显示器成像与车内,为驾驶员提供路面情况参考。同时由于摄像头视角有限,以及高速情况下驾驶员视野盲区增大,即使再车内成像也难以观察到一些障碍物,因此加装一套感应雷达装置,与摄像头配合使用,使得驾驶员在视觉和听觉上共同收到提示,避免视觉盲区带来的危险。
关键词 汽车A柱盲区;视线盲区处理;视觉;听觉
中图分类号 TP3 文献标识码 A 文章编号 1674-6708(2016)160-0135-02
1 绪论
1.1 研究背景
我国机动车保有量逐年攀升,大大的增加了普通民众出行时对汽车这种交通工具的依赖。然而随着汽车保有量的增加,每年我国发生的交通事故也成上升趋势,国家针对交通事故愈发重视,从政策上出发,加大了对道路安全的监管力度,严格强化了交通法规,从驾驶员角度出发,使驾驶证考试变得更加严格与困难,提高了驾车上路所要求的水平。然而,仅仅从国家政策角度出发是远远不够的。作为汽车工业中的重要一环,汽车安全技术也起着至关重要的作用。因此设计一款实用合理的A柱盲区消除系统并在一般乘车用上安装使用可以大幅度提高汽车主动安全性,对汽车工业的发展以及汽车驾乘人员安全至关重要。
1.2 研究意义
2013年11月4日,驾驶员宋某驾车上班途中因为A柱盲区撞了环卫工作人员所幸伤情不重;2013年12月23日,新浪大连新闻报道,一辆SUV因A柱盲区挡司机视线惨醜车祸,造成一死一伤。[1]由于因A柱盲区引起的路面交通事故频发,所以人们日益关注A柱盲区的问题。A柱盲区消除系统的研发,是汽车主动安全的一项突破性成就,解决了汽车在行驶过程中尤其是转弯时,驾驶员视角难以观察斜前方,发生剐蹭等一些不必要的事故的问题。因此解决A柱盲区的问题在汽车安全技术领域来讲有着必要的研究意义。
1.3 A柱盲区消除系统发展现状
早在1885年德国人卡尔·佛里特立奇·本茨发明汽车以来,汽车的安全性就一直为人们所重视。而有着居安思危未雨绸缪思想的工程师,则在汽车工业发展之初就重视起汽车主动规避风险的能力,称为汽车主动安全性。在消除A柱盲区这个问题上,前人做了很多的努力,其中主要包括[2]以下方面。
1)把汽车A柱上面开三角窗或者安装倒车贴。但是这种方案由于效果有限且对A柱结构改变后不符合原来白车身设计时的结构强度影响被动安全性能。
2)通过改编A柱材料进而提高A柱强度,在满足强度额前提下适当缩小A柱的尺寸(尤其是宽度)。
3)用三角形的硬质材料(如钢铁)填充到树脂玻璃中,利用树脂玻璃材料作为A柱材料,达到“A柱透明化”的效果,进而解决A柱盲区问题。
4)在车外安装辅助摄像头,通过线路连接到车内,在车内A柱处安装等效显示器把车外的路况影响呈现在车内A柱上的显示器上。
2 A柱盲区消除系统理论介绍
2.1 A柱与驾驶员距离及A柱宽度对盲区的影响分析
众所周知,不同车型拥有不同的A柱,包括倾斜角度的不同以及宽窄度的不同等等。对盲区产生影响的主要是A柱的宽窄度,也就是说在驾驶员位置不变的情况下,A柱越宽所产生的盲区越大。另外如果A柱宽度不变的情况下,驾驶员距离A柱越近则A柱盲区越大。由于中国汽车驾驶员位置位于前排左侧所以左面的A柱相比右面的A柱产生的盲区要大一些。如图1所示。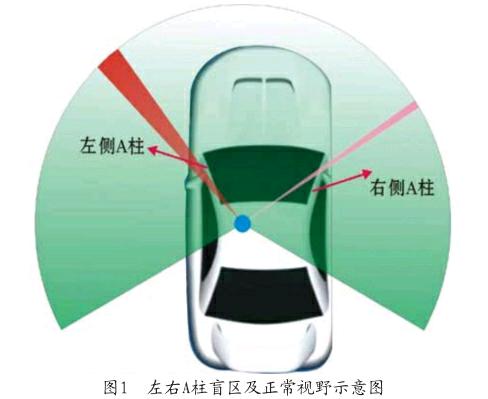
其中,左侧A柱盲区为6.8°(红色区域),右侧A柱盲区为2.3°(粉色区域),正常视野为210°(绿色区域)。
2.2 车速对驾驶盲区的影响分析
拥有驾驶经历的人都知道,当驾驶汽车达到一定速度时,如果在横向突然出现物体是极为危险的,原因一在于车速快难以控制汽车制动,原因二在于没有发现横向有物体出现而忽略制动。这就不禁让我们想到车速与视野范围是否存在一定联系?经具体实验及查阅文献资料得知,当车速在40km/h的时候,驾驶员视野范围是100°,随着车速的增加,每提升1km/h,视野减小1°。静止时视野约为210°,70km/h时视野约为65°,100km/h时视野约为40°[3]。因此可知视野盲区不单只有A柱遮挡造成,也由车速决定。所以本文的消除A柱盲区系统在低速转弯时应用更为合理。
2.3 设计解决方案
本文的设计思路主要是通过摄像头采集车外路况影响,通过数据线路传输到车内显示器中,再由显示器成像与车内,为驾驶员提供路面情况参考。同时由于摄像头视角有限,以及高速情况下驾驶员视野盲区增大,即使再车内成像也难以观察到一些障碍物,因此加装一套感应雷达装置,与摄像头配合使用,使得驾驶员在视觉和听觉上共同收到提示,避免视觉盲区带来的危险。设计方案原理如图2所示。
3 A柱盲区消除系统硬件与实现
3.1 硬件装配及布置
由于各种汽车A柱设计不同,所以为使得驾驶员视线观察舒适方便,应适当调整摄像头角度及车内显示器角度和位置,故在这里对摄像头角度及显示器角度和位置不加以详细说明,以方便驾驶员观察为准。
具体装配及布置(以汽车左侧A柱为例):
在汽车A柱上钻与摄像头大小相似的孔,再打磨至与摄像头尺寸一致。将摄像头安装至A柱上,调整好角度使其可以照到路面。在A柱上以相同方式安装感应雷达,感应范围不宜过大,本文中采用1.5m~2m报警雷达。将摄像头数据传输线与雷达数据传输线共同连接在事先编写好程序的处理器上,雷达数据由音频线连接一个小型喇叭输出,摄像头数据由视频AV线连接显示器输出。以转向灯开关为触发点,也就是说在驾驶员打开转向开关的时刻,摄像头与雷达开始工作,达到转向时A柱盲区成像的效果,从而消除A柱盲区。电路简图如图3所示。

3.2 运用单片机实现控制3.2.1 单片机介绍
本系统中采用的AT89S52单片机该种单片机是一种低功耗高性能的8位微控制器具有8k字节在系统可编程Flash存储器,AT89S52使用Atmel公司高密度非易失性存储器技术制造与工业80C51产品指令和引脚完全兼容片上Flash允许程序存储器在系统可编程亦适于常规编程器在单芯片上AT89S52拥有灵巧的8位CPU和在系统可编程Flash使得AT89S52为众多嵌入式控制应用系统提供高灵活有效的解决方案[4]。
3.2.2 单片机控制的实现
对单片机进行程序编写(具体程序代码参考市面上已有倒车影响雷达装置的单片机程序),达到转向开关开启,雷达发射电路工作、摄像探头工作、接收探头工作、接收电路工作,经单片机处理使得显示器电路工作、报警电路工作的效果。报警及显示电路图4所示。
4 结论与展望
经过实际试验证明本装置在车辆直线行驶及转弯时都能够正常工作,起到一定的消除A柱盲区的作用,即使在摄像头角度无法观测到的位置出现障碍物,雷达也可起到一定的报警提示功能,从而避免事故发生,有一定的实用价值。但在实用中也会出现一些问题,比如路面颠簸改编了摄像头角度与位置、高速行驶超车时如对向有车驶过报警装置会在不需要响应时响应,造成不必要的麻烦、整体线路没有与CAN总线相连,独立在整车系统之外,与车辆的融合度不高等问题。这些都是本系统设计上的不足之处,因此这一工作还有很大程度的提高空间,需要不断改进与完善。
在未来的主动安全领域,A柱盲区消除将有着不可取代的作用。未来的A柱盲区发展在满足高度集成高度电子化的同时,应着眼于人机结合领域,将人眼视觉显示器相关联,显示器主动捕捉人球的运动,达到人眼随动的效果,则驾驶员应用起这套程序来更加得心应手。
参考文献
[1]廖术娟.基于电子透明理念的A柱盲区消除系统研究[D].成都:西南交通大学,2014.
[2]张俊.基于TMS320DM642的A柱盲区消除系统的研究与设计[D].成都:西南交通大学,2009.
[3]王琪峥,董力军.A柱挡住视线酿事故[J].WORLD OF DRIVER驾驶园,2012(7):90.
[4]刘鑫,朱靖玉.基于单片机的倒车雷达的设计.电子设计工程,2012,20(1):94-97.
猜你喜欢
未来英才(2016年22期)2016-12-28
中小企业管理与科技·上旬刊(2016年11期)2016-11-28
商情(2016年40期)2016-11-28
人间(2016年27期)2016-11-11
青年文学家(2016年27期)2016-11-02
启迪与智慧·教育版(2016年8期)2016-10-20
课程教育研究·学法教法研究(2016年10期)2016-06-16
小学教学参考(综合)(2016年2期)2016-03-10
