
H∞整形法在巡检用无人机控制器中的应用
2016-04-11 03:36康姝艺薛阳黄伟江天博伏丽娜
广东电力 2016年2期
关键词:鲁棒性
康姝艺,薛阳,黄伟,江天博,伏丽娜
(上海电力学院 自动化工程学院,上海 200090)
H∞整形法在巡检用无人机控制器中的应用
康姝艺,薛阳,黄伟,江天博,伏丽娜
(上海电力学院 自动化工程学院,上海 200090)
摘要:四翼机应用于无人机电路巡检领域可降低成本、提高效率,但作为多输入多输出欠驱动控制对象,因其极易受气象环境影响,具有多变量、多耦合、非线性等特性,实现稳定性控制是目前面临主要困难之一。选择鲁棒控制器控制无人机姿态变化,是一种较为直观的方法,通过观测控制对象伯德图,对控制对象进行超前或滞后补偿,并不断调整补偿器设计,修正伯德图和各输出曲线,并将仿真结果结合实际硬件进行测试对比,从而达到H∞回路整形法设计控制器的目的。结果表明该方法算法简洁,原理明确,且不必涉及对对象过分数学化的问题。
关键词:鲁棒性;四翼机;H∞;回路整形;伯德图
我国输电线路近年来不断增加,其工作环境易受外界干扰影响,线路巡检至关重要。电路巡检多为人工操作,巡视工作量大,对人员要求较高,地理环境和天气因素也会给巡视人员带来未知的风险,导致人力资源消耗,同时造成安全隐患。目前的电路巡检可采用无人机方式,操作无人机结构设备相对简单,既克服了地面巡线班组距离和观测视场角的难题,也解决了人工巡线的费用高、安全性差、精度低等问题[1]。
欧美各国在20世纪50年代开始研究并使用无人机完成巡线、带电作业和线路施工,20世纪90年代开始,我国也开始研究利用无人机巡线的技术。近年来,我国在有人机和无人机巡线方面均进行了较为广泛的研究并取得了进步。无人机物理构成为四个属性一致、安装呈十字的旋翼,在同一转轴平面内驱动。改变四个旋翼的转动速度控制整体运转,带动机械本身的力矩变化[2]。目前可采用多种控制方法,如使用脉冲宽度调制(pulse width modulation,PWM)信号控制动力驱动模块[3],设计模糊比例-积分-微分(proportion integration differentiation,PID)控制器[4]或基于Backstepping算法设计控制器[5]等。PWM信号控制准确,但需要额外设计安装无线遥控模块,机械要求较高,硬件要求繁琐。PID控制算法成熟,原理简明,普遍性较高,但自适应性较差,对于多输入多输出系统设计过程复杂,控制效果并不理想;Backstepping算法控制精准,自适应性较好,抗干扰能力强,但设计过程复杂,易过分数学化。以上方法在实际电路巡检应用中均不完全适用。
本文控制目标是在施加实际风速干扰下保持飞行器水平稳定,并成功跟随输入参考信号。以四翼机作为多输入多输出系统,观测飞行器各角度指标,选用鲁棒控制并进行H∞回路整形法设计,其优势为:对含有不确定参数和结构的系统,可弱化过分数学化倾向,直接设计性能优良的控制器,对于电路巡检具有良好的实用性。
1四翼机数学模型


图1 四翼机结构
(1)
式中:l为每个旋翼重心到公共转轴的距离;Kf为螺旋桨迫使推力常数;Ktn为正常旋转时螺旋桨转矩推力常数;Jx为翻转轴等效转动惯量;Jy为俯仰轴等效转动惯量;Jz为偏航轴等效转动惯量。
(2)
状态空间最终表达为:

(3)
2H∞回路整形法设计控制器
2.1设计原理
电路巡检中,无人机需要长期滞空,自由平稳悬停,并能克服一定范围内的风速干扰。为保证无人机按照一定的姿态角机动飞行,飞控系统需具备以下功能:在复杂的气流扰动中保持飞机姿态稳定,保持飞机按给定的高度平稳飞行,保持飞机按给定的航向角平稳飞行[7]。
本文使用H∞回路整形作为新方法设计多变量鲁棒控制器,控制对象为偏航角、翻转角和俯仰角,藉由修正补偿器特征值修正频域特性曲线,便于观测预期控制效果。在补偿环节和标准对象形成前路中合理调整W,确保最终回路中没有不稳定零极点相消[5]。控制对象回路整形完成后,对闭环回路结构适当调整,可使补偿器和控制器组成新的鲁棒控制器。
以图2所示多输入多输出连接回路为例,P为原控制对象的多输入多输出矩阵,W1为滞后环节补偿器,W2为超前环节补偿器,Ps为进行回路整形后的控制对象,K∞为控制器,K等效为回路整形后补偿器W1,2与原控制器共同作用所得新控制器。在伯德图中,超前环节作用于中高频段,滞后环节作用于低频段,伯德图在各频段中趋势可作为实际控制效果表现依据,因此使用频率超前和滞后补偿器W1与W2修正控制对象P与回路整形对象Ps=W2×P×W1的特征值和伯德图,使控制输出满足闭环回路输出要求,获得新的控制器K=W1×K∞×W2,修正方向参考以下原则[1,6]:
a) 低频段:增益偏大可达到紧密跟踪参考信号的目的。
b) 中频带:反应速度与中频带宽度密切相关,带宽大可加快反应速度。
c) 高频段:噪音一般为高频信号,斜率较大可减小传感器噪音和衰减动态特性。
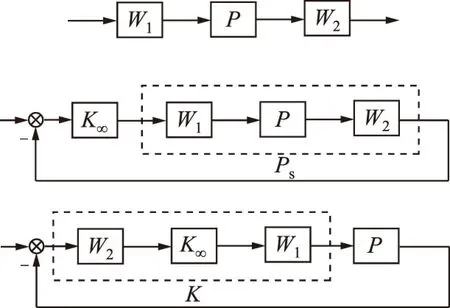
图2 回路整形法原理
2.2设计鲁棒控制器
H∞频域特性整形法的控制器设计导向,是MIMO系统的伯德图分析。在伯德图中高低频段和穿越频率等参数均表现为系统某方面特性,可作为设计者的设计参考依据。

L(ω)—幅值,ω—频率,ωl、ωu—分别为穿越频率调整的下限和上限。图3 伯德图的调整
但仅获得合理曲线,并不能完全保证所得控制器的闭环稳定性。如图4所示,引入变量:参数回路增益的倒数GM[8],1/GM为鲁棒稳定裕度b(Ps,K∞)=Ps×K∞。由K=W1×K∞×W2,Ps=W2×P×W1可知,K的阶数与控制对象P和权重环节W相乘所得矩阵一致。如图4所示,输入信号为r,控制对象为P的闭环反馈回路,可适当调整为仅由K∞与Ps所组成的闭环回路。由小增益理论可知[8-10],当回路增益b(Ps,K∞)=Ps×K∞=1/GM<1时,该反馈回路系统可实现内部稳定。
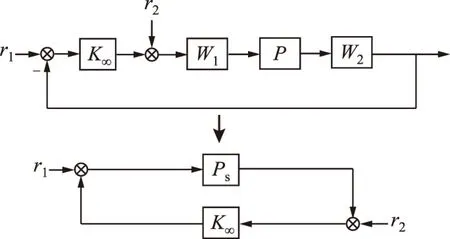
图4 根据小增益理论进行回路调整
此外,闭环传递函数在任意两点间输入输出增益都可用鲁棒稳定裕度及其他参数表示,通过指定不同频率区域中的鲁棒稳定裕度及其他参数,可间接限制较复杂控制系统中每个闭环传递函数矩阵的大小[8]。图线调整完毕后投入仿真模型观测控制效果,并绘制回路整形效果Ps=W2×P×W1,以Ps作为依据得控制器K与控制器状态空间。将状态空间表达应用于实际设备,观察控制效果。
3结果分析
实际电路巡检环境变化多端,无人机受风速变化影响较大,因此需设计极点较多、抗干扰能力较强的控制器。实际实验中采用的硬件效果如图5所示,确保所有的输出通道对应的奇异值大致相同前提下,对补偿器K∞进行零极点和阶数调节,图5(a)为控制器五极点五零点的实际控制效果,当GM=1.81,20 s时加入风机作为干扰,模拟巡检环境风速和方向变化,影响效果明显;图5(b)为调整后设计效果,六极点五零点,GM=1.57,控制效果显著提升,克服干扰较好。
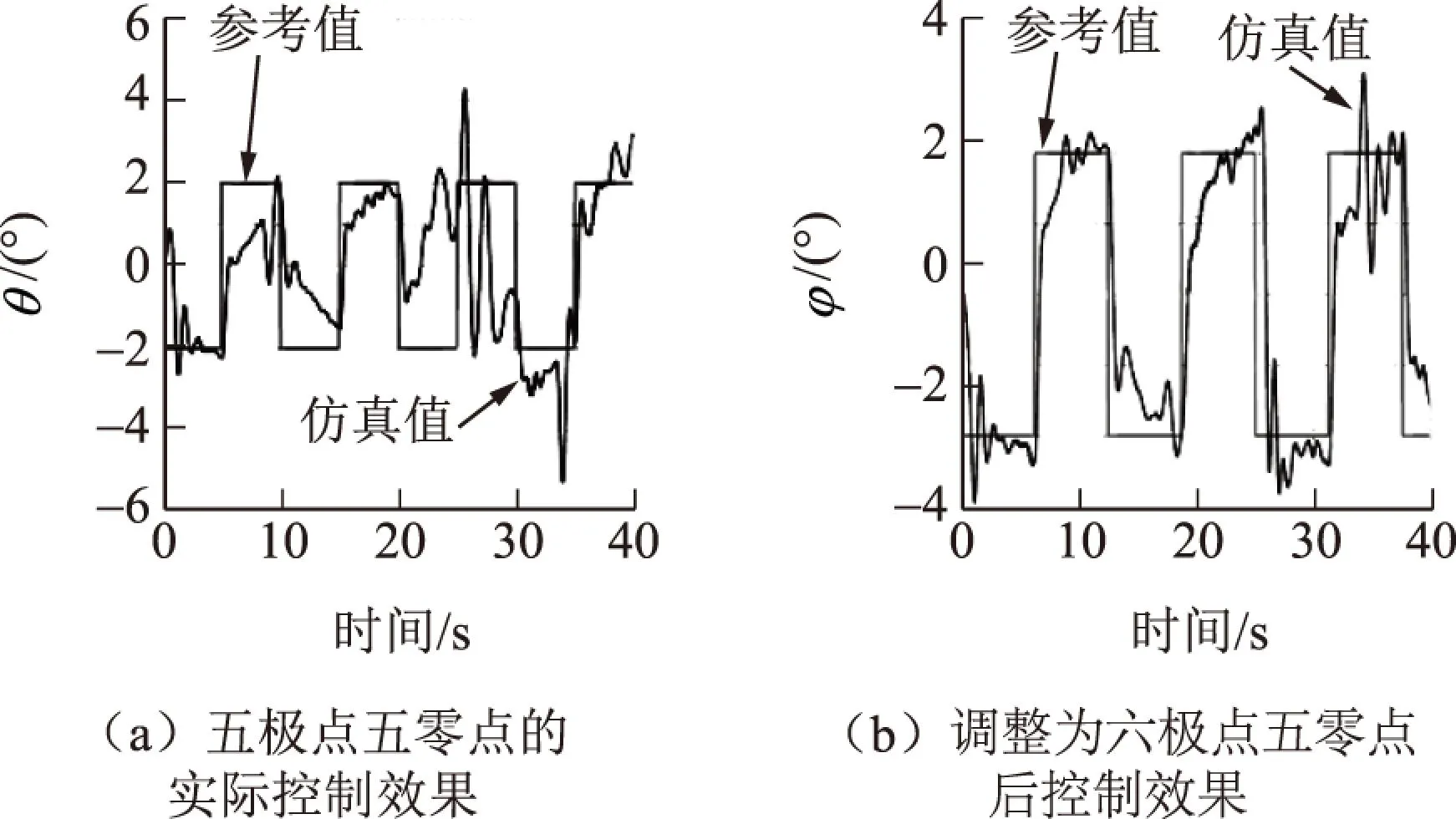
图5 不同极点数目下的鲁棒控制效果
控制器K设定为五零点六极点的形式后,效果较原控制器更准确,调整时间缩短,反应更为迅速,误差和超调量均有所减小。
先进行常规PID控制器仿真设计,选取四翼机的偏航角作仿真对象,输入阶跃信号,图6(a)为常规PID控制,图6(b)为H∞频域特性法回路整形控制。

y(t)—阶跃响应,t—时间。图6 阶跃响应仿真结果
将仿真所得控制器投入四翼机模型,输入信号阶跃5,上升时间与稳态误差都极小,稳定时间5 s,传统PID控制超调超过50%且震荡剧烈。因此相比常规PID控制,使用H∞频域特性法回路整形可得更好的控制效果。经由鲁棒控制的四翼机硬件在分别输入阶跃与方波信号(输入方波信号时在第20 s加入风速变化干扰)下的各项指标控制效果见表1。四翼机角度指标均得到良好控制,超调量处于可控范围,上升时间极短(小于5 s),稳态误差极小,在方波输入信号下的控制效果略差于阶跃输入信号。
表1各项指标控制效果
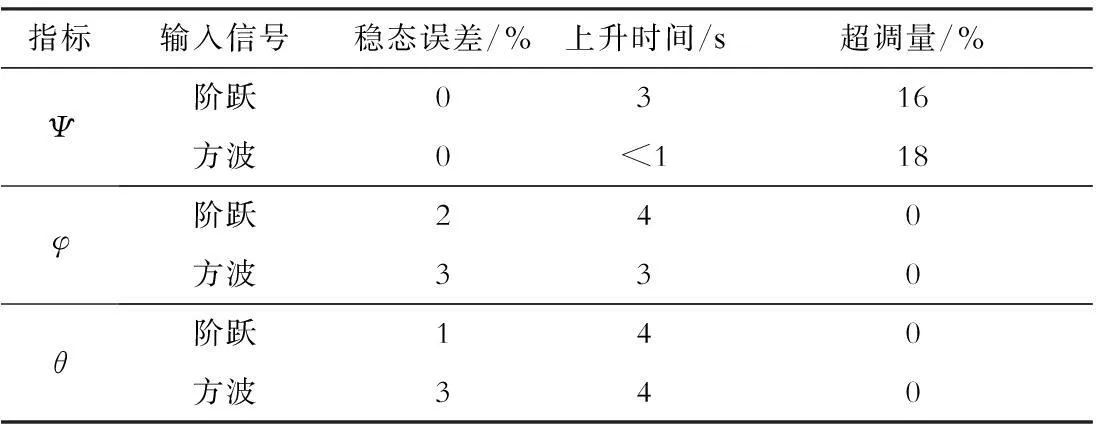
指标输入信号稳态误差/%上升时间/s超调量/%Ψ阶跃0316方波0<118φ阶跃240方波330θ阶跃140方波340
4结束语
本文阐述了一种快捷有效的基于电路巡检目的的无人机控制器设计,在对四翼机模型线性化后,以鲁棒控制理论为依据,使用H∞回路整形法设计闭环回路控制器,在仿真环境与实际硬件环境下均成功实现对飞行器的稳定性控制,在风速变化等外部扰动下表现出良好的鲁棒性。其设计比Backstepping和PWM信号控制动力驱动模块更为简洁,控制结果亦显著优于常规PID控制器,为适用于电路巡检的无人机控制提供了新途径。无人机在电路巡检中的成功应用推广,也将对电力行业的发展有诸多助益。
参考文献:
[1] 李钟宁,陈凤翔. 无人机在输电线路中的巡检应用[J]. 贵州电力技术,2012,15(4):83.
LI Zhongning,CHEN Fengxiang,UAVInspection Application in Transmission Lines [J]. Guizhou Electric Power Technology,2012,15(4):83.
[2] KOJIMA A. H∞Controller Design for Preview and Delayed Systems[J]. IEEE Transactions on Automatic Control: 2015(2): 404-419.
[3] 李秀英,刘彦博. 基于PWM的四旋翼飞行器控制方法[J]. 吉林大学学报, 2011,29(5):464-472.
LI Xiuying,LIU Yanbo. Control of Four-rotor Aircraft Based on PWM[J]. Journal of Jilin University,2011,29(5):464-472.
[4] 张镭,李浩. 四旋翼飞行器模糊PID姿态控制[J]. 计算机仿真,2014(8):73-77.
ZHANG Lei, LI Hao, Attitude Control of Four-Rotor Aircraft via Fuzzy PID[J], Computer Simulation:2014(8): 73-77.
[5] 刘焕晔. 小型四旋翼飞行器飞行控制系统研究与设计[D]. 上海:上海交通大学,2009.
[6] KHALIL H K. Nonlinear Systems[M]. New Jersey:United States of America: Prentice Hall, 2002.
[7] 陈西广,董罡,王滨海,等. 固定翼无人机巡检输电线路探讨[J]. 山东电力技术,2011(5):183.
CHEN Xiguang,DONG Gang,WANG Binhai,et al. Discussion on Transmission Line Inspection with Unmanned Fixed-wings Aircraft[J]. Shandong Electric Technology,2011(5):183.
[8] LANZON A,PETERSEN IR. Stability Robustness of a Feedback Interconnection of Systems with Negative Imaginary Frequency Response[J]. IEEE Transactions on Automatic Control,2008(4):219-223.
[9] 严恭敏,严卫生,徐德民. 简化UKF在SINS大失准角初始对准中的应用[J]. 中国惯性技术学报,2008,16(2):208-211.
YAN Gongmin, YAN Weisheng, XU Demin. Application of Simplified UKF in SINS Initial Alignment for Large-misalignment Angles[J]. Journals of Chinese Inertial Technology,2008,16(2):208-211.
[10] 陈晓兵,马玉林, 徐祖舰. 无人飞机输电线路巡线技术探讨[J]. 南方电网技术,2008,2(6):56-01.
CHEN Xiaobing, MA Yulin, XU Zujian. Research on Transmission-lines-cruising Technology with the Unmanned Aerial Vehicle[J]. Southern Power System Technology,2008,2(6):56-61.
康姝艺(1991),女,湖北黄石人。助理工程师,理学硕士,实验员,主要研究方向为先进控制及系统工程。
薛阳(1976),男,江苏无锡人。副教授,博士后,工学博士,主要研究方向为智能控制、电力机器人和新能源发电。
黄伟(1966),女,广东广州人。教授,工学硕士,主要研究方向为控制系统优化。
(编辑王朋)
广告
广东番开电气设备制造有限公司
封面
广东电网有限责任公司江门供电局
封二
《广东电力》投稿征订
封三
广东电网有限责任公司珠海供电局
封底
广州南方电力集团科技有限公司
A1
Application of H∞Loopshaping Method in Controller of Unmanned Aerial Vehicle for Inspection
KANG Shuyi, XUE Yang, HUANG Wei, JIANG Tianbo, FU Lina
(School of Automation Engineering, Shanghai University of Electric Power, Shanghai 200090, China)
Abstract:It is able to lower the cost and increase efficiency by using quadrotor in unmanned aerial vehicle (UAV) circuit inspection, but as multi-input, multi-output (MIMO) and under-actuation controlled member, the quadrotor is very easy to be affected by meteorological environment and has characteristics such as multivariate, multi-coupling, nonlinearity, and so on. Thus, realization of control on stability is one of the main difficulties at present. Selecting robust controller to control posture change of UAV is a kind of intuitive method, which is to conduct advancing or hysteretic compensation on the controlled member by observing its Bode diagram, and continuously adjust design of the compensator, revise Bode diagram and various output curves. In addition, this method could carry on testing comparison between simulation results and actual hardware so as to achieve the aim of using H∞loopshaping method to design the controller. Results indicate that this method is concise and explicit in its principles, which means not necessary to make the controlled member involve excessive mathematization problem.
Key words:robust; quadrotor; H∞; loop shaping; Bode diagram
作者简介:
中图分类号:TP391.9
文献标志码:A
文章编号:1007-290X(2016)02-0090-05
doi:10.3969/j.issn.1007-290X.2016.02.018
基金项目:上海市自然科学基金资助项目(13ZR1417800);国家自然科学青年基金资助项目(51405286)
收稿日期:2015-09-25修回日期:2015-11-10
猜你喜欢
科技研究·理论版(2021年22期)2021-04-18
农业机械学报(2020年2期)2020-03-09
中华建设(2019年7期)2019-08-27
系统管理学报(2018年2期)2018-08-13
电脑知识与技术(2016年28期)2016-12-21
科教导刊·电子版(2016年23期)2016-10-31
项目管理技术(2016年12期)2016-06-15
电脑知识与技术(2016年9期)2016-05-18
西南交通大学学报(2016年6期)2016-05-04
电子科技(2016年1期)2016-02-29
