基于场景的ESC系统冰雪道路试验评价方法研究*
2016-04-11 12:03高继东高博麟谢书港
汽车工程 2016年12期
高继东, 高博麟,2, 谢书港
(1.中国汽车技术研究中心,天津 300300; 2. 天津大学机械工程学院,天津 300300)
基于场景的ESC系统冰雪道路试验评价方法研究*
高继东1, 高博麟1,2, 谢书港1
(1.中国汽车技术研究中心,天津 300300; 2. 天津大学机械工程学院,天津 300300)
采用基于场景的试验方法,针对ESC的过度转向和不足转向的干预能力,在冰雪道路上进行了ESC测试,分别设置了滑行避障试验、制动避障试验和稳态圆周试验。结果表明,与滑行避障试验相比,制动避障可更有效地测试车辆ESC系统的性能,同时更接近于实际交通驾驶场景;采用质心侧偏角和横摆角速度跟随误差能有效分析ESC的控制效果,可作为车辆ESC系统在低附路面上的性能评价指标。
ESC;基于场景的测试方法;冰雪道路;避障试验;稳态圆周试验
前言
汽车是人们普遍使用的交通工具之一,在带给人们出行便利的同时,也造成了大量的交通事故。由于电子稳定控制系统(electric stability control,ESC)是对汽车防抱死制动系统(ABS)和牵引力控制系统(TCS)功能的进一步扩展,并在此基础上,增加了车辆转向行驶时横摆角速度传感器、横向加速度传感器和转向盘转角传感器,通过ECU分别控制前后轴左右车轮的驱动力和制动力,确保车辆行驶时的转向操纵性和横向稳定性。由于ESC在减少交通事故方面具有显著作用,越来越多的汽车制造商已经开始将ESC作为车辆的标准配置。
与此同时,针对ESC系统的测试评价方法也在不断发展中,尤其是针对高附路面上的ESC性能测试方法。2007年颁布的美国FMVSS 126法规[1],明确规定采用在高附路面上的正弦延迟试验来验证车辆ESC系统的干预性能。ECE R13H中也添加了有关ESC的测试标准,其内容与FMVSS 126基本保持一致[2]。此外,行业协会和标准化组织的推荐高附路面试验标准,如ISO 7401 J-turn试验[3]、ISO 3888变道和避障试验[4]等也都被用来测试评价ESC的控制效果[5]。文献[6]中采用在高附路面上的Fishhook测试对稳定性系统的控制效果进行了验证。文献[7]中采取了高附路面上的2/3避障试验对ESC的控制干预能力进行了测试评价。
相比较而言,关注低附路面上测试评价方法的研究相对较少。文献[8]中在冬季低附路面上进行了稳态回转和ISO避障作为DSC性能评价的两个主要工况,并初步给出了部分主客观评价的DSC性能评价方法。文献[9]中则在冬季道路上进行了与TCS控制相关的测试与评价研究,但未涉及ESC系统的测试评价。此外,目前国内正在开展的ESC 推荐性标准也对低附路面上的ESC测试评价方法进行了可行性分析。因此,针对整车ESC系统在低附路面上的性能,进行测试与评价方法研究,对规范ESC技术发展、促进ESC技术水平的提升,具有重要意义。
另一方面,针对汽车主动安全的测试方法,通常可以分为两大类[10]:一类是基于场景的测试方法;另一类是基于功能的测试方法。基于场景的测试方法,其测试工况设计依据通常来源于实际道路交通事故数据,从大量的数据中提取出最接近危险交通场景的设计参数,来指导测试工况的设计工作。其优点在于测试工况本身贴近于实际道路交通事故场景,测试目的能够有效提升主动安全系统在实际应用中的性能表现。与之相对,基于功能的测试,其工况设计依据来源于主动安全系统的子功能设计。测试工况对系统本身的性能进行非常有针对性的检验,但却无法保证测试工况能够与实际道路交通事故场景接近或吻合。
对避免交通事故的统计研究显示[11],在紧急避障的过程中,低附路面上98%的驾驶员在转向的同时进行了制动;高附路面上94%的驾驶员在转向的同时进行了制动。由此可见,传统的等速行驶避障试验很难复现出真实道路环境下驾驶员的实际操纵动作,也很难对ESC系统在该工况下的控制性能进行有效评价。因此,针对ESC的控制功能设定与实际交通事故场景相近的制动避障测试工况,更有利于对ESC的性能评价,其评价结果也更有针对性。
因此,针对以上研究现状,提出了在低附路面上的制动避障测试评价试验,并在冬季试验场进行了大量的测试试验研究。分别设置了压实雪地路面上的滑行避障试验和制动避障试验,通过对比试验,验证提出测试评价方法的有效性。最后,通过稳态回转试验对测试评价方法的工况适应性进行了验证。试验分析结果为未来研究ESC的冬季道路的有效测试评价方法,补充完善ESC测试评价体系做好了前期的数据积累及试验研究工作。
1 ESC控制功能简介
为了能够实时检测车辆的危险行驶状态和驾驶员意图,并做出相应的控制响应,ESC系统通常需要包括以下几个部分的控制模块:车辆状态感知模块、横摆力矩分配模块、车轮滑移控制模块和轮缸压力控制模块等。


图1 博世ESP的控制模块结构图

由于横摆角速度是描述车辆横向运动的重要变量,因此,在ESC系统中,通常会将名义横摆角速度作为车辆实际横摆角速度的控制目标。
然而,如果是车辆在湿滑路面上的转弯工况,仅仅控制车辆的横摆角速度和侧向加速度是不够的,还需要考虑车辆质心侧偏角的影响。
如图2所示,图中最下方曲线代表高附路面上,角阶跃输入车辆的运动姿态;如果在低附路面上,ESC仅控制横摆角速度跟随名义横摆角速度,车辆的运动姿态则会如图中最上方曲线所示,质心侧偏角过大失去稳定性,同时几乎完全丧失转向能力;而如果同时考虑横摆角速度控制和质心侧偏角控制,车辆就能够在低附路面上较好地实现转向能力,并保证转弯行驶的稳定性,如图中中间曲线轨迹所示。因此,在低附路面上,对ESC控制效果的测试评价比在高附路面上需要考虑更多的评价因素和更有针对性的评价指标。
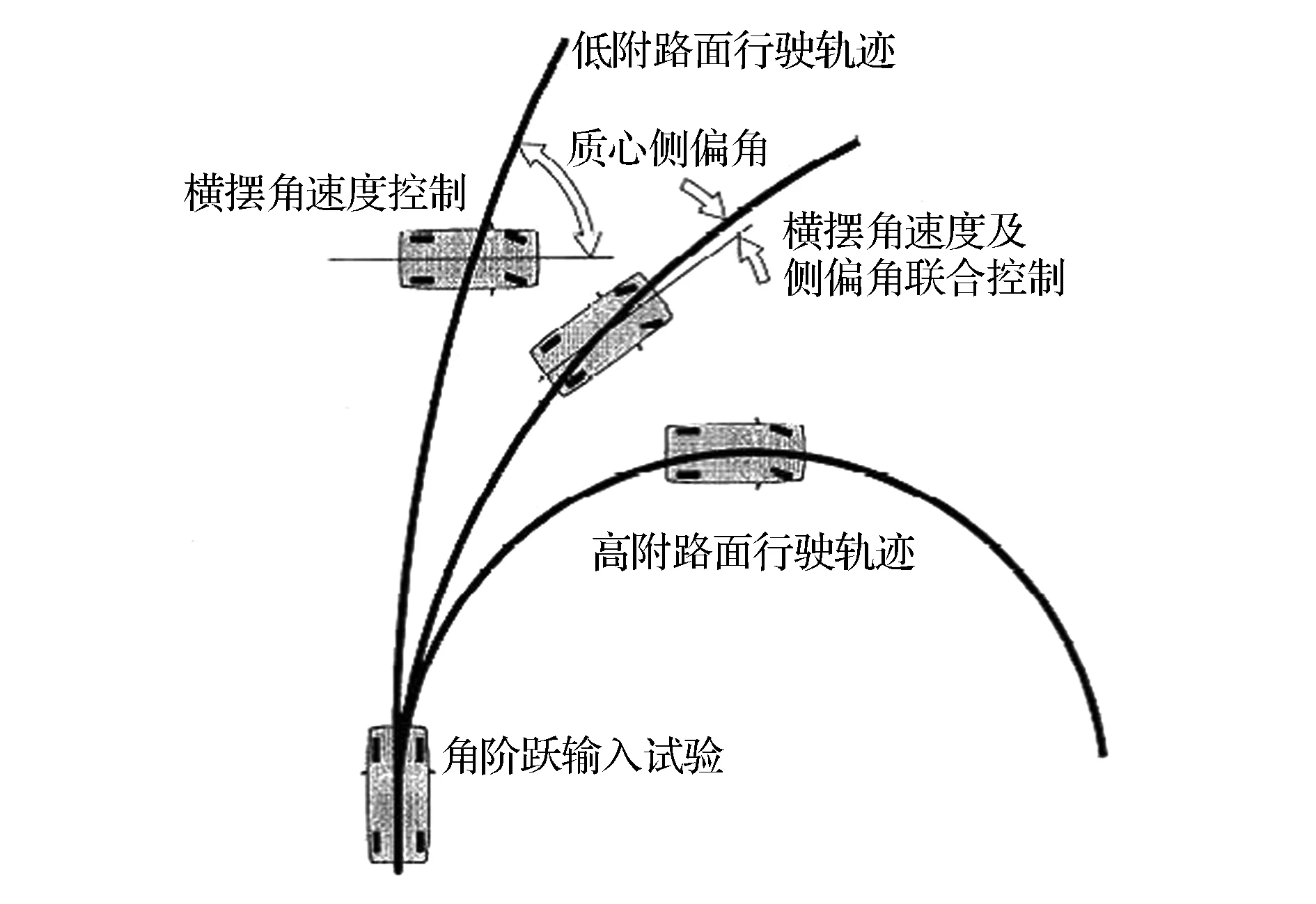
图2 低附路面上ESP对不足转向工况的干预原理
2 典型ESC冬季试验及分析
为了研究装备有ESC系统车辆在冬季道路上的有效测试评价方法,开展了冰雪道路上的车辆ESC测试评价试验研究。采用一台装备有ESC系统的国产轿车,其部分参数如表1所示。在黑河卧牛湖水库汽车试验场,先后进行了冰雪路面的性能试验,试验包括避障试验和稳态圆周试验,其中避障试验又包含了滑行避障试验和制动避障试验。
试验过程中用到的传感器和测量信号如表2所示,系统采样频率为1 000Hz。

表1 试验车辆参数规格表
试验场地的路面峰值附着系数测量结果,采用GB 21670—2008《乘用车制动系统技术要求及试验方法》中的“k值法”进行测定,最终测得压实雪面的路面峰值附着系数约为0.32。
2.1 避障试验
由于ESC系统中的名义横摆角速度通常是由线性2自由度车辆模型计算获得,同时,ESC系统为了能够实时获取车辆的关键运动参数,如纵向车速、横摆角速度和质心侧偏角等信息,通常需要建立状态观测器进行实时估计。在纯侧偏转向工况下,ESC系统更容易获得准确的实时运动状态参数;然而,由于轮胎物理附着极限的影响,当车辆处于制动转向或加速转向时,轮胎将同时受到地面纵向制动力和侧偏力作用,此时,车辆状态观测器的对车辆关键状态参数的获取就容易出现偏差甚至错误。
另一方面,实际车辆行驶过程中,当驾驶员遇到前方障碍物时,往往会紧急踩下制动踏板减速,同时进行转向避障操作。因此,这种横纵向联合的转向工况更接近于实际驾驶场景,对ESC控制性能的测试评价而言,也更具有实际意义。
因此,分别进行了滑行避障和制动避障试验,并对试验数据进行对比分析研究,验证制动避障试验对ESC性能测试评价的有效性。
2.1.1 滑行避障试验
在滑行避障工况中,车道宽度为3.75m,驾驶员首先将车辆加速到80km/h,并保持车速,然后松开加速踏板,让车辆保持自由滑行状态,进行避障试验,其试验工况如图3所示,部分试验曲线如图4所示。

图3 避障试验工况

图4 压实雪面滑行避障试验
由图4可见,在第20~25s之间,驾驶员进行了避障操作,整个转向过程中,纵向车速从80km/h下降至65km/h。期间,当车辆经过第①个、第②个和第④个弯角时,车辆实际横摆角速度超过名义横摆角速度,如图4(d)所示,车辆有出现过多转向趋势,ESC系统及时准确地进行了干预动作,如图4(e)所示,对车身姿态进行了纠正和补偿。因此,整个避障试验过程中,最大横摆角速度跟随偏差出现在第24.5s,约为13°/s,同时,质心侧偏角保持在1.2°以内,如图4(c)所示,表明车辆行驶状态稳定,驾驶员能够顺利完成转向工况。
在滑行避障试验中,ESC系统能够有效判断车辆当前的行驶状态,并及时干预纠正,防止车辆出现不稳定行驶工况,ESC系统顺利通过滑行避障测试。
2.1.2 制动避障试验
在滑行避障之后,进行了制动避障试验,并对比分析ESC系统在两种工况中的性能差异。
制动避障工况中,驾驶员首先将车辆加速到100km/h,并保持车速,然后松开加速踏板,完全踩下制动踏板,使车辆处于紧急制动状态,同时进行避障操作,其试验操作曲线如图5(a)和图5(f)所示。
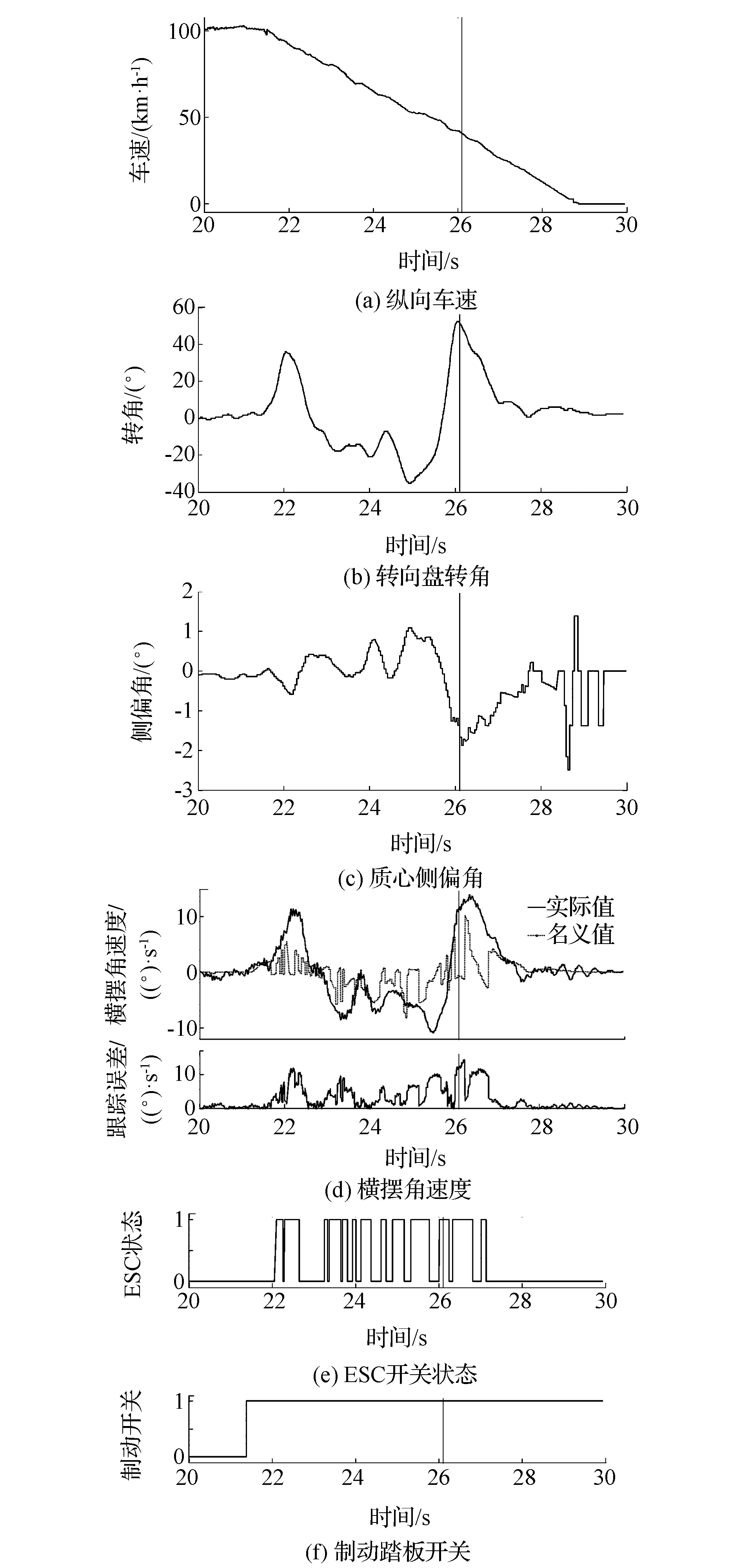
图5 压实雪面制动避障试验
对比滑行避障的测试数据可以看出,整个制动避障过程中,车速从100km/h下降至20km/h。尽管在第④个弯角处,车速已经降至41km/h,见图5(a),远低于滑行避障中第④个弯角处的车速(70km/h),但制动避障工况中,驾驶员仍需要转动更大的转向盘转角才能够完成转向动作,见图5(b),其原因是:在这种纵滑-侧偏联合工况中,地面制动力消耗了大部分的前轴轮胎附着力,使得能够提供车辆侧偏转向的附着力较小,因此需要转动更大的转向盘转角,才能使车辆完成预期的转向轨迹。
另一方面,在整个制动避障过程中,车辆名义横摆角度的计算结果几乎无法与转向盘转角建立对应联系,如图5(d)所示,其根本原因在于ESC系统的名义横摆角速度不仅依赖于线性2自由度模型的计算结果,同时也受到轮胎等效侧向峰值附着系数的影响。由于地面纵向制动力消耗了大部分的轮胎附着力,使轮胎等效侧向峰值附着系数相比于实际路面峰值附着系数显著降低,因此,名义横摆角速度的计算结果始终受到车辆纵向制动的限制,导致车辆的实际横摆角速度始终难以与名义横摆角速度相一致,ESC系统在整个避障过程中频繁工作,尤其从第③到第④个弯角期间,横摆角速度的跟随误差几乎维持在10°/s。
同时,与滑行避障工况相比,车辆行驶姿态出现了明显差异:整个制动避障过程中,车辆的质心侧偏角与转向盘转角出现了明显的反向状态,如图5(c)所示,也即车辆始终处于过多转向的行驶姿态中;尤其在第④个弯角处,车辆的质心侧偏角与横摆角速度方向相反,并且达到了-2°。由于冰雪道路上,车辆质心侧偏角的极限特征值约为±2°,超过该特征值,车辆将难以控制而发生激转侧滑[9]。因此,此时车辆已经接近了失稳边界,驾驶员反打转向盘达到了50°以维持稳定行驶,如图5(b)所示,尽管ESC系统频繁干预防止车辆出现失控,如图5(e)所示,但车辆依然处于不稳定的行驶状态。
进一步对完成的13组制动避障和滑行避障试验结果进行对比统计分析,选取试验过程中的最大质心侧偏角βmax和最大横摆角速度跟随误差Δγmax两项指标,对比结果如表3所示。
由表可见,在13次制动避障试验中,βmax的平均值为2.15°,已经处于冰雪路面上车辆稳定行驶的边界条件,与之相对,滑行避障试验时βmax的平均值仅为1.22°,远小于制动避障中的数值。同时,制动避障工况中的Δγmax的平均值为15.36°/s,也明显大于滑行避障工况中的Δγmax的平均值11.10°/s。
从上述分析可以看出,制动避障工况能够有效测试车辆ESC系统的性能表现,同时采用质心侧偏角和横摆角速度跟随误差可以有效分析车辆在避障过程中的ESC控制效果,且其数值大小能够表征ESC系统对车辆控制优劣的程度,可以作为车辆ESC系统低附路面避障试验的性能评价指标。
2.2 稳态圆周试验
车辆在压实雪面上,沿圆半径为143m的圆弧轨迹顺时针行驶,驾驶员节气门开度约为50%,纵向车速74km/h左右,在开启ESC的条件下,车辆的一组试验曲线如图6所示。

图6 压实雪面稳态圆周试验
由图可见,第20s之前,如图6(a)和图6(f)所示,驾驶员节气门开度和车速较为稳定,转向盘转角在0~30°之间不断调整,由于圆周运动的车速较快,因此,ESC频繁干预,以控制实际横摆角速度能够跟随名义的横摆角速度值。由图6(d)可见,第20s之前,横摆角速度的跟随误差不超过15°,质心侧偏角能够一直控制在-1°左右,且与车辆转角方向相同,表明车辆并未出现任何过多转向的趋势,且具有轻微的不足转向特征,但并不影响驾驶员对车辆的转向操纵。
第20~25s之间,尽管驾驶员节气门开度并未减少,如图6(f)所示,但由于ESC从18s开始持续工作,如图6(e)所示,导致纵向车速出现降低。ESC的持续干预控制,使得车速连续下降,车辆由稳定行驶趋向于过多转向,质心侧偏角达到了+1.5°,并大范围快速振荡,如图6(c)所示,表明车辆的行驶状态处于反复调整的不稳定状态;同时横摆角速度的实际值与名义值出现较大偏差,如图6(d)所示,ESC系统已经无法有效控制横摆角速度跟随,最大跟随误差超过了20°/s。对应地,由于车辆行驶状态的不稳定,驾驶员连续大角度调整转向盘角度,甚至出现了反打方向(即车辆向右顺时针转向的过程中,转向盘向左转动)的现象。此时,驾驶员认为稳态圆周工况已经无法维持,从而完全松掉加速踏板,转向盘回正至中位,此次稳态圆周试验结束。
从上述分析可以看出,采用质心侧偏角和横摆角速度跟随误差可以有效分析车辆稳态回转中的ESC控制效果,其数值能够表征ESC对车辆控制优劣的程度,可以作为车辆ESC系统低附路面稳态圆周试验的性能评价指标。
3 结论
(1)在路面峰值附着系数约为0.32的压实雪面上,设计进行了ESC冬季道路试验的试验工况,包括稳态圆周试验和避障对比试验,避障对比试验包括滑行避障试验和制动避障试验。
(2)避障对比试验结果表明,相对于滑行避障,制动避障工况可以更加有效地测试车辆ESC系统的性能表现,也更接近于实际交通驾驶场景,对ESC匹配性能的测试评价更具有实际意义。
(3)稳态圆周试验和避障试验表明,采用质心侧偏角和横摆角速度跟随误差可以有效分析车辆在试验过程中的ESC控制效果,且其数值大小能够表征ESC系统对车辆控制优劣的程度,可以作为车辆ESC系统在低附道路的性能评价指标。
[1] FMVSS 126. Electronic stability control system[S]. National Highway Traffic Safety Administration, March 2007.
[2] ECE R13-H uniform provisions concerning the approval of passenger cars with regard to braking[S]. 2009.
[3] ISO 7401 road vehicles—lateral transient response test methods—open-loop test methods[S]. 2011.
[4] ISO 3888-1/2 passenger cars—test track for a severe lane-change maneuver[S]. 1999.
[5] 高振海,王竣,郭健. 汽车稳定性多控制工况设计及其切换机制研究[J]. 机械工程学报,2004(4):107-112.
[6] TCHAMNA R, YOUN I. Yaw rate and side-slip control considering vehicle longitudinal dynamics[J]. International Journal of Automotive Technology, 2013,14(1):53-60.
[7] 郭建. 汽车稳定性控制系统控制策略与评价方法研究[D]. 长春:吉林大学, 2011.
[8] 于良耀, 宋健, 李亮,等. 汽车动力学稳定性控制系统冬季试验[J]. 农业机械学报, 2007(11):4-8.
[9] 李静, 宋大凤, 赵健,等. 越野汽车TCS冰雪道路试验研究[J]. 汽车工程, 2005,27(5):561-564.
[10] Jan Jacobson, JacquesHérard, Henrik Eriksson. How can active safety functions be tested[C]. 2011 CITA Conference and General Assembly, 4-6 May 2011, Berlin, Germany.
[11] ELIZABETH N M, SCOTT BALDWIN G H, DANIEL V McGehee. Driver crash avoidance behavior with ABS in the lowa driving simulator[C]. SAE Paper 1999-01-1290.
[12] VAN ZANTEN A T. Bosch ESP system: 5 year of experience[C]. SAE Paper 2000-01-1633.
A Study on Evaluation Method for Scenario-based Test of ESC System on Snow-icing Roads
Gao Jidong1, Gao Bolin1,2& Xie Shugang1
1.ChinaAutomotiveTechnology&ResearchCenter,Tianjin300300;2.TianjinUniversity,SchoolofMechanicalEngineering,Tianjin300300
An ESC test is conducted on snow-icing roads by adopting scenario-based test method to validate the capabilities of oversteer and understeer intervention. The tests include coasting obstacle-avoidance test, braking obstacle-avoidance test and steady circular test. The results show that compared with coasting obstacle-avoidance test, the braking obstacle-avoidance test can better test the performance of vehicle ESC system and is closer to driving scenario in real traffic condition. Using the tracking error of mass center side slip angle and yaw rate can effectively analyze the control effects of ESC, suiting to be the performance evaluation indicator for vehicle ESC system on low-adhesion road.
ESC; scenario-based test method; snow-icing road; obstacle avoidance test; steady circular test
*国家863计划(2011AA11A286)资助。
2016239
原稿收到日期为2015年2月12日,修改稿收到日期为2016年1月18日。
猜你喜欢
汽车实用技术(2022年14期)2022-07-30
北京航空航天大学学报(2021年4期)2021-11-24
汽车与驾驶维修(维修版)(2021年10期)2021-11-05
民用飞机设计与研究(2020年4期)2021-01-21
新课程·中学(2019年7期)2019-09-17
导航与控制(2019年2期)2019-06-12
中学生数理化·教与学(2019年5期)2019-06-06
中学课程辅导·教师通讯(2018年10期)2018-09-04
物理教学探讨(2018年1期)2018-02-13
汽车实用技术(2017年20期)2017-10-24