
电动汽车空调电机无位置传感器控制的实验研究*
2016-04-11 09:53魏海峰
汽车工程 2016年1期
魏海峰,张 懿,杨 康,顾 凯
(江苏科技大学电子信息学院, 镇江 212003)
2016019
电动汽车空调电机无位置传感器控制的实验研究*
魏海峰,张 懿,杨 康,顾 凯
(江苏科技大学电子信息学院, 镇江 212003)
为满足电动汽车空调的工程需求,采用一体式电机-涡旋压缩机,研究了压缩机中永磁同步电机无位置传感器控制方案。该方案基于传统的三段式驱动方法,在开环加速与转速闭环之间,增加位置闭环的环节,以改善切换的可靠性。在闭环运行阶段,采用滑模观测器估算电机转子位置和转速,进行了大量样机实验,通过相电流、母线电流、转速、转矩和功率等多参数实验结果的互相印证,验证了控制方案的有效性和可行性。
车载空调;永磁同步电机;滑模观测器;无传感器运行
前言
一体式电机-涡旋压缩机因其所具有的独特优势,已成为电动汽车车载空调领域的研究热点,压缩机电机及其控制器的设计则是其中的关键技术之一[1-2]。传统的永磁同步电机驱动控制,需要光电编码盘之类的机械传感器来检测转子位置,增大了压缩机体积和成本,降低了系统的可靠性[3-5]。据统计,电机90%的故障与位置传感器有关。对于一体式电机-涡旋压缩机,电机安装空间更为有限,且压缩机内温度往往超过100℃,充满了强腐蚀性的高压制冷剂,运行环境恶劣[6]。因此,研究车载空调电机的无传感器控制对电动汽车的技术进步和市场拓展具有积极作用。
常用的永磁同步电机无传感器控制方法主要有3种类型:一类是基于电机理想模型的开环计算方法[7-9],该方法计算过程简单、动态响应迅速,但是受参数不确定性和测量噪声影响较大,一般很少采用;另一类是利用电机凸极特性获取位置信息的方法[10-13],在转速低至零时仍可实现观测,但它局限于凸极电机,且额外引入的高频信号会降低电机的控制性能;最后一类是基于反电动势的观测方法[14-17],其本身具备出色的动静态性能,但在低速时观测精度不高,须在电机转子定位并启动运行至一定转速后,方可投入使用,不适用于零速重载的启动条件。考虑到空调压缩机启动时负载转矩较小,约为额定负载的10%,并且对启动过程没有特殊要求,易于进行转子定位,满足基于反电动势观测方法的应用前提。本文中采用转子位置滑模观测器来观测转子的位置角和转速,以实现其无传感器驱动控制。转子滑模观测器是基于反电动势观测器的一种,具有对系统数学模型精度要求不高,对系统内部参数摄动和外部环境扰动具有较强鲁棒性的特点,特别适用于电动汽车车载空调的应用场合。
本文中根据车载空调应用的工程实际,采用一体式电机-涡旋压缩机,将滑模观测器与电机阶段式启动运行有机结合,改进了电机的闭环切换策略,提出电动汽车空调电机无位置传感器控制方案。在此基础上,研制了某型号国产电动汽车的空调系统,利用搭建的实验平台,开展了大量实验研究,验证了本文中控制方案的有效性。
1 一体式电机-涡旋压缩机
系统采用电机与涡旋压缩机一体式设计,电机和压缩机本体封闭在一个壳体内,因此无传动损耗。除轴承外,没有金属接触,无运动机构的摩擦磨损,机械效率高。电机通过贴合压缩机冷端表面进行冷却,借助冷媒循环可自行冷却而无须外加冷却设备。该涡旋压缩机采用动涡轮和静涡轮组合的动静式结构,动、静涡轮都由端板和从端板上伸出的渐开线型涡旋齿构成,两者偏心配置且相差180°。压缩机运行时,静涡轮静止不动,动涡轮在防转机构的约束下,由曲柄轴带动作偏心回转平动。气体由吸入口经空气滤芯吸入静涡轮的外围,随着偏心轴的旋转,气体在动静涡轮啮合所组成的若干个月牙形压缩腔内被逐步压缩,然后由静涡轮中心部件的轴向孔连续排出。对于传统内燃机汽车空调,压缩机转速与内燃机转速成固定比例关系,转速由内燃机的最低转速和内燃机与压缩机之间的传动比所决定,而电动空调压缩机的转速可以自由调整,其范围只与电机的调速范围有关。
本文中采用的车载变频空调系统由电动压缩机、冷凝器、蒸发器、膨胀阀和连接管路等组成。车内温度高时,温度信号传到电机控制器,控制器提高输入永磁同步电机的频率和电压,使电机转速升高,压缩机单位时间的排气量和空调的制冷量增加。车内温度低时,温度信号传到电机控制器,控制器降低输入电机的频率和电压,使电机转速降低,压缩机单位时间排气量和空调的制冷量减少。电动机内置式结构使得制冷剂的泄漏大大减少,无需电磁离合器控制压缩机运转,噪声降低。该压缩机体积小,质量轻,可靠性高,安装方便,能有效减小整车质量和体积。
2 转子位置滑模观测器
永磁同步电机α-β两相坐标系下电压平衡方程为
(1)

定义滑模面为
(2)
滑模观测方程为
(3)

式(3)减去式(1)得电流观测误差的状态方程:
(4)
系统进入滑模状态后,有
(5)
代入式(4),并将不连续的含有高频成分的反电势信号低通滤波,得其估算值为
(6)
(7)
由式(6)和式(7)计算得到转子位置角为
(8)

3 无位置传感器的驱动控制
由本文中算法可知,滑模观测器是通过计算反电势相角来得到转子位置。理论上,滑模观测器可用于系统全速范围内转子位置的观测,但在电压和电流的实际测量中总会存在测量噪声和测量误差,它们必然会引起反电势的偏差。当系统高速运行时,因电机的端电压比较大,测量误差和测量噪声在整个反电势中所占的比例相对较小,偏差量相对估算的反电势值较小,因此电机尚能较好地运行。但是当电机低速时,端电压很小,测量误差和测量噪声相对反电势所占比例增大,漂移量相对估算的反电势也较大,使电机低速运行性能变差,甚至根本无法运行。因此,永磁同步电机无位置传感器驱动,须要按照电机启动、低速和高速的不同转速区间,研究阶段式的驱动策略。
常用的电机三段式驱动方法,由开环加速阶段直接进入矢量控制转速闭环阶段,同时引入转子位置、转速、励磁电流和转矩电流等多个变量的闭环控制,控制结构变化大,会引起切换的失败。由于转速估算和电流矢量变换的前提都在于转子位置角度的观测,位置闭环是其中最重要的闭环环节,也是其它闭环控制成功的基础。本文中改进了传统的三段式无位置传感器驱动方法,将闭环运行阶段进一步分为位置闭环和转速闭环两个先后步骤:开环加速之后,先将滑模观测器得到的转子位置闭环,完成电机的自同步运行,再进行转速、电流的闭环控制,提高开环与闭环阶段间切换的可靠性。
3.1 转子定位
由于永磁体的存在,永磁同步电机转子静止时转子磁链就有其随机的空间位置,转子定位是通过施加方向恒定的空间电压矢量,使转子N极定位在指定位置处。因此,本文中将逆变器两相导通,控制电机励磁电流为0,转矩电流为常值,且两者夹角为-90°,使定子产生特定方向的磁场,并保持一段时间。转子便可转到两相旋转坐标系的直轴和三相静止坐标系的A轴重合的位置,实现转子相位的初始化。转子定位阶段须保持足够的电流,以产生足够大的电磁转矩,同时为防止电机过流,电流应控制至电机额定电流的10%~40%。
3.2 开环加速
在完成转子定位后,则须使电机加速到能让滑模观测器准确估算出转子角度的最小转速。在开环启动阶段,采用恒压频比控制,通过控制逆变器电压和频率比值不变,保持气隙磁链幅值恒定,进而达到控制电磁转矩和电机转速的目的。为了让永磁同步电机不产生失步现象,则须保证升频升压曲线尽量和电机自身的压频曲线一致。由于变频空调系统本身设有自动过流保护的功能,因此,频率设定必须通过给定积分算法产生升速信号,升速的积分时间可根据温控模式的需要进行选择。
3.3 闭环运行
传统的永磁同步电机无传感器控制,是在开环加速后直接切换至转速闭环,由于控制结构变化大,会发生切换失败的情况。针对这一问题,本文中将闭环阶段进一步分为位置闭环和转速闭环两个步骤,在位置闭环完成之后,再进行转速闭环控制,提升了闭环切换的可靠性。
3.3.1 位置闭环
随着电机的启动,转速逐渐上升,电机的反电势也被建立起来,用于转子位置估计的有用信息可从反电动势中分离出来,则可利用滑模观测器进行估算。此时,先启动滑模观测器进行转子位置的开环预估计,使估算误差减小。在经历几个电周期待角度估算稳定后,将转子位置信号的来源由开环的外同步信号转换到滑模观测器的转子位置观测信号,实现电机的自同步运行。定子绕组产生的旋转磁场位置由永磁转子的位置决定,自动地维持与转子磁场90°的夹角,可使单位转矩电流产生的电磁转矩较大。
3.3.2 转速闭环
位置闭环运行时,将所得转子位置角对时间求导即可计算得出转速。当电机转速升至1 000r/min时,进入矢量控制转速闭环阶段。矢量控制是对电机励磁电流和转矩电流相位及幅值的控制,也即将对电机转矩的控制,落实到对定子电流的控制上。只要保证励磁电流为0,使定子电流产生的电枢磁动势与转子励磁磁场间的角度为90°,即保持正交,就能保证电机的电磁转矩与转矩电流成正比。由于无需励磁电流,励磁损耗为0,铜耗亦随之减小,有助于提升空调运行效率。矢量控制使电机的转速根据空调制冷量的需要而连续变化,实现压缩机制冷量连续可调的变频控制。
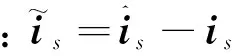
图1给出了基于滑模观测器的永磁同步电机无传感器矢量控制系统框图,图中d和q表示电机同步旋转坐标系下的d-q坐标轴。
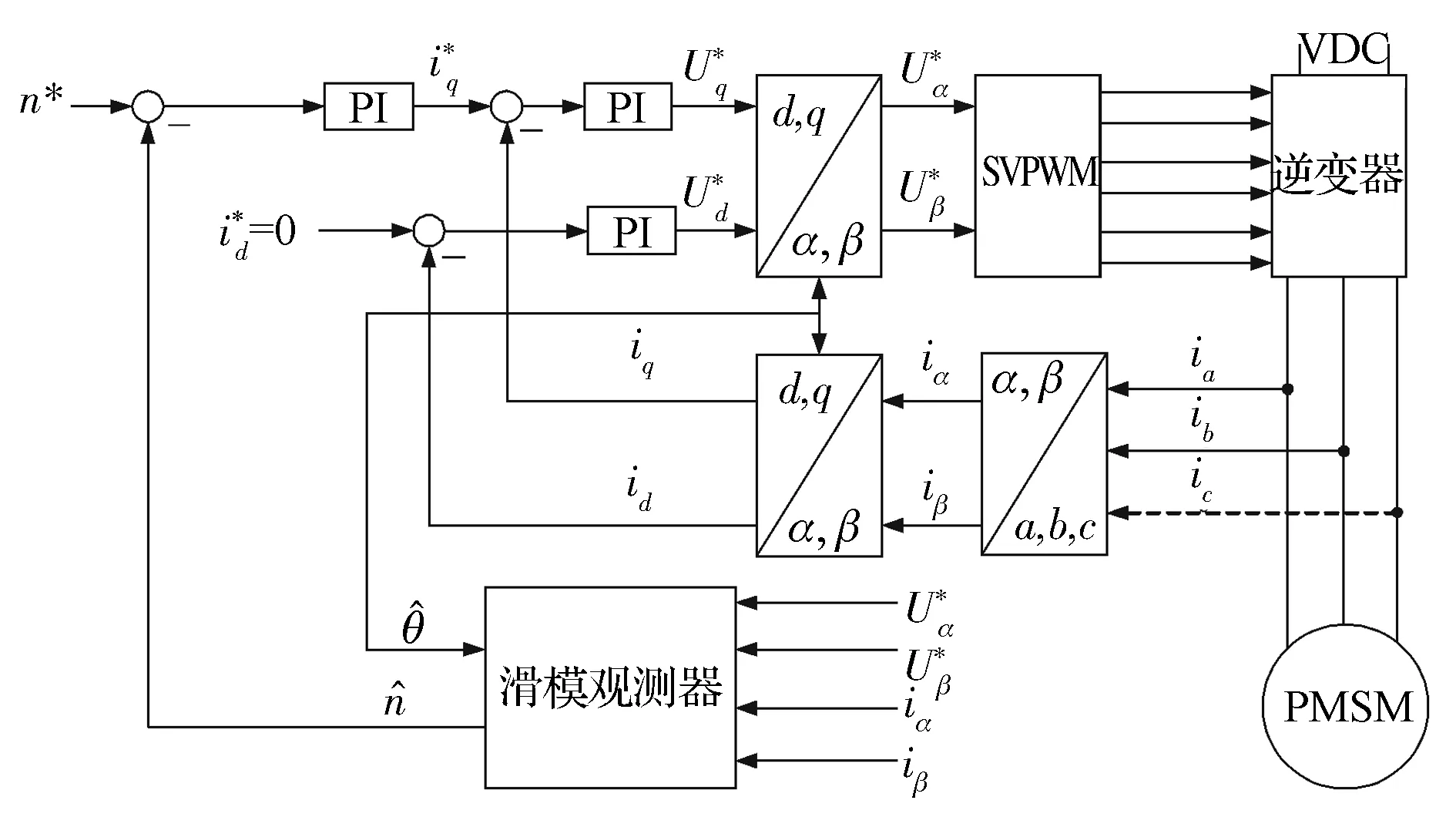
图1 采用滑模观测器的矢量控制系统框图
4 实验研究

图2 车载空调样机
采用ZC系列磁滞测功机构建了车载空调永磁同步电机实验平台。磁滞测功机由带齿极定子、空心磁滞杯转子、激磁线圈、支架和底板等组成,当磁滞测功机内部线圈通过电流时产生磁力线,并形成磁回路而产生转矩,改变励磁电流即可改变负载力矩。实验平台具有手动、定点、自动测试方式,负载可根据设置自动加载,扫描出电机从空载到堵转的特性曲线。电机测试数据可以用报表或曲线方式显示或打印,并可保存和查看;显示曲线时,可以修改曲线坐标参数和横坐标、纵坐标的选择。多台电机的测试曲线可以在同一界面下比较,曲线坐标值、曲线纵坐标和横坐标可以修改,系统可进行带负载耐久实验,遇到电机不正常时自动报警并停止实验。图2为车载空调样机,压缩机具体参数如下:排气量为34cm3/r,蓄电池电压为312V,母线电流为9.1A,极对数为3,噪声为76dB,净质量为6.4kg,制冷量为5.60kW(6 000r/min),输入功率为2.85kW(6 000r/min),性能系数(COP)为1.95(6 000r/min)。
采用提出的无位置传感器控制策略,开展了电机定位启动实验、运行实验和高速重载实验,对控制方案的可行性和有效性进行了分析研究。
4.1 定位启动实验
图3为电机定位启动实验的相电流波形图。由该图可以看出,转子定位初始时刻冲击电流达到5A,定位时间持续1.2s,随后电机启动运行,相电流呈现出正弦波形。实验过程中,转子定位时,伴随着“咔”的轻响,可观察到电机转子被迅速拉至定位位置。随后,电机开始启动,并逐渐加速,进入开环运行阶段。图3说明本文中驱动控制策略能完成电机的定位和启动,定位冲击电流可控,可顺利进入开环加速阶段。
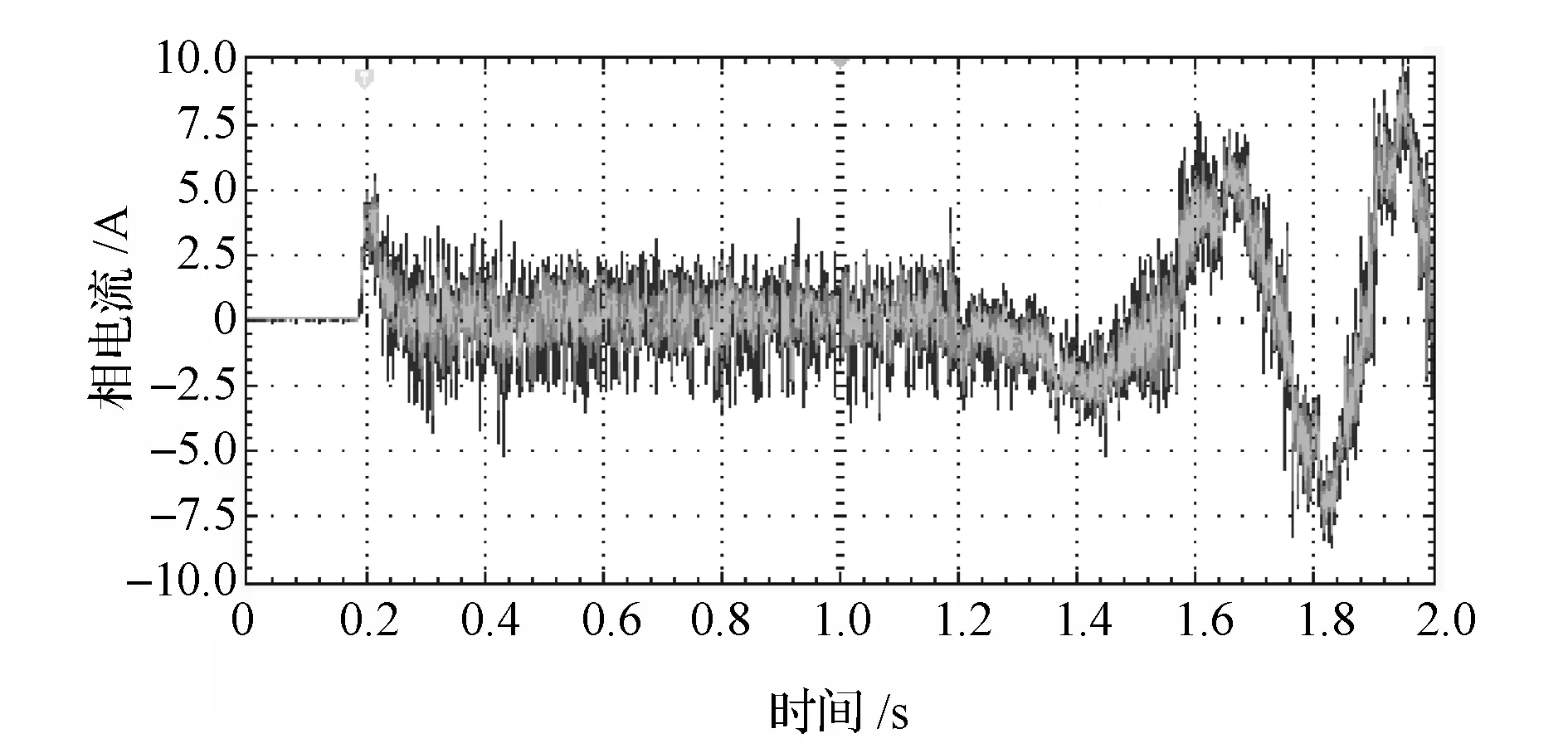
图3 定位启动时的相电流波形
图4~图6分别为无传感器驱动下的电机相电流波形、母线电流-转速曲线和转速-时间曲线。图4~图6为同一实验测得,可从不同侧面相互印证控制策略的性能。特别是图5,从转速和直流母线电流两者关系入手,从一种新颖的角度研究电机的运行特征。
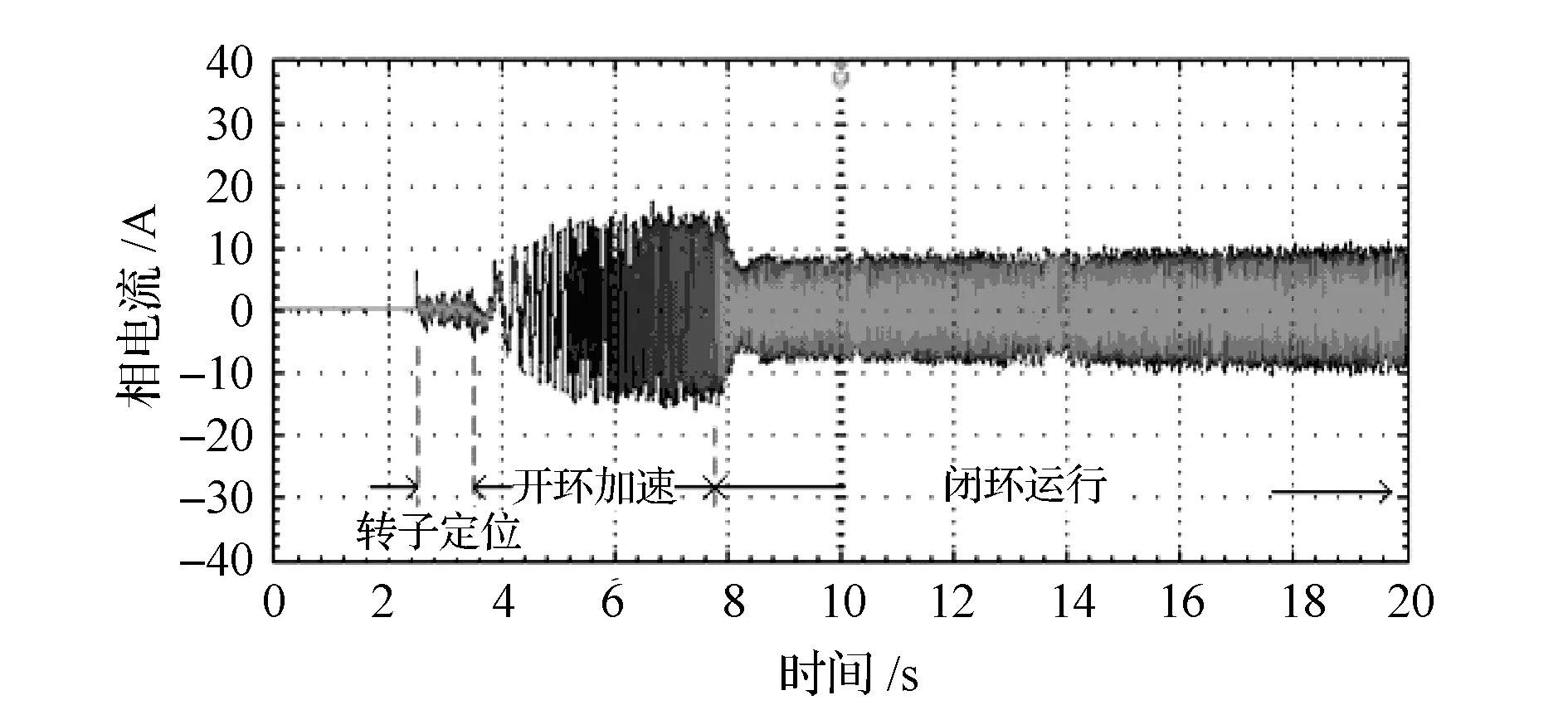
图4 相电流波形
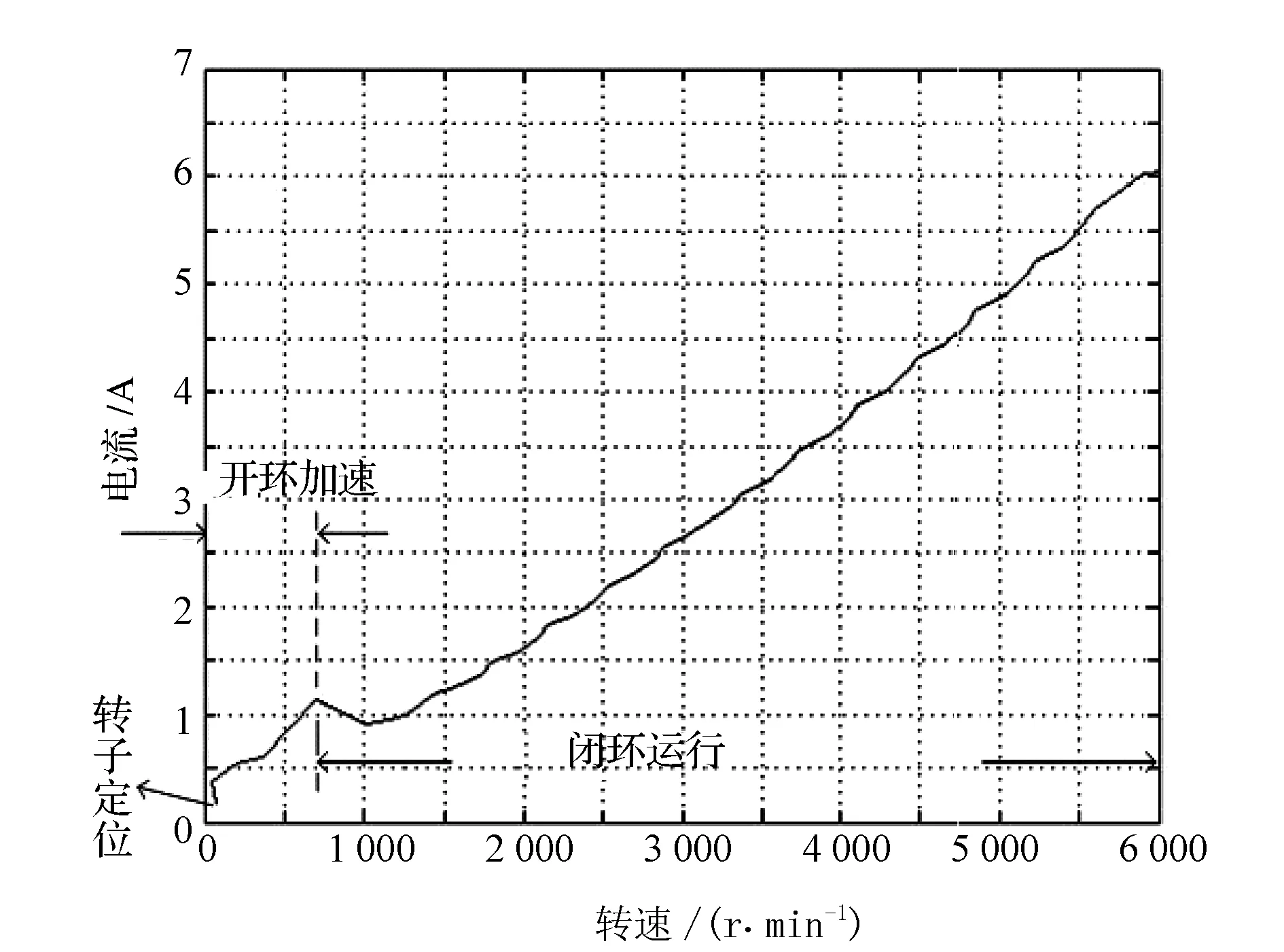
图5 转速-母线电流曲线

图6 转速-时间曲线
统观图4~图6中的3条曲线可见,电机运行的阶段性特征明显,转子定位、开环升速和闭环运行3个阶段清晰可见。定位启动阶段已于4.1节中说明,下面重点分析后两个阶段。
4.2 开环加速实验
开环加速阶段,由于转子位置观测器尚未投入运行,在逆变电源外同步状态下,电机定转子磁场并不是处于理想的垂直状态。因此,即使所需电磁转矩较小,无论是相电流还是母线电流都比较大。从图4和图5可明显看到,开环加速时,相电流和母线电流都有急剧增加,两者峰值分别为16和1.2A。同样由于定转子磁场的这种非正交性,根据电磁转矩为电流矢量和定子磁链矢量叉积的关系,电磁转矩脉动会比较大。从图5和图6也可看出,在此阶段,母线电流和转速的变化波动较大。与此对应,实验过程中,开环加速期间的振动和噪声明显。
4.3 闭环运行实验
4.3.1 位置闭环
开环加速运行4s,本实验中对应转速为715r/min时,系统切换至位置闭环运行状态;当转速升至1 000r/min时,再进入转速闭环状态。从开环进入位置闭环后,可以发现,即使图6中电机转速变化率,即反映电磁转矩的加速度不降低的情况下,图4和图5在该阶段对应的相电流幅值和母线电流都有明显减小。也就是说,由于转子位置信号可通过滑模观测器观测得到,注入永磁同步电机定子绕组的电流,便可由转子位置信号来控制,从而进入定子旋转磁场由转子位置来决定的自同步运行模式。通过查阅测功机的记录数据可知,电机运行效率在位置闭环前后各1s时刻测得的数值,也由34.1%突增至63.5%。同时,实验过程中的噪声也比开环加速阶段有明显降低。综合上述波形、曲线、效率和实验结果可知,滑模观测器能正确观测出永磁同步电机由外同步进入自同步状态时转子的位置,从而实现电机的无位置传感器控制运行。
4.3.2 转速闭环
在位置闭环运行阶段,同时计算滑模观测器所得转子位移对时间的导数,得到电机转速,当电机转速达到1 000r/min时,本实验中对应时间为第6s的时刻(以转子定位时刻为时间起点),系统进入转速闭环阶段。按照图1所示的矢量控制模式,根据空调制冷量的需求,驱动压缩机调速运行。从图4和图5可以明显看到,第6s和1 000r/min时刻,相电流和母线电流都存在一个明显的转折点。图6的转速-时间曲线也显示,在转速闭环阶段,电机转速平稳上升,可稳定运行于设定的6 000r/min处,且控制精度高。上述实验结果充分表明滑模观测器运行可靠,转子位置观测准确,转速计算正确,能完成系统的矢量控制变频调速。
4.4 高速重载实验
为分析控制策略在高速重载极端条件下的运行效果,进行了高速重载实验,电机在6 000r/min、最大负载转矩6N·m下的相电流波形如图7所示。由图7可知,相电流频率为303.5Hz,据此可算得转速为
转速控制误差为
图7中,电机相电流有效值达到了21.6A,系统仍具有良好的运行性能。但是,由于滑模控制为开关逻辑,并非连续控制,本身存在缺陷,会造成如图7所示的信号抖动。因此,下一步须研究适合工程应用的滑模观测器去抖动算法。
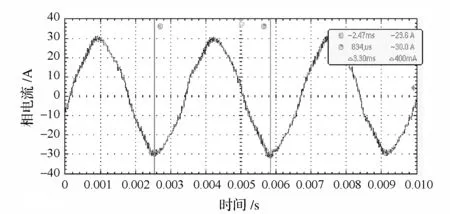
图7 6 000r/min和6N·m时的相电流波形
5 结论
本文中采用将滑模观测器与电机无传感器运行有机结合的控制方案,通过详细的理论分析和实验研究,得到如下结论:
(1)控制策略能有效实现电机转子定位和启动,在转速闭环与开环加速之间,设计了位置闭环运行阶段,提高了闭环切换的可靠性;
(2)滑模观测器能准确测取电机转子的位置信息,从而完成无位置传感器运行时的自同步与闭环调速;
(3)即使在高速重载工况下,控制方案仍具有较高的调速精度;
(4)在压缩机运行的常态工况下,电机运行效率可达90%,并在较大转矩区间内都具有80%以上的运行效率。
综上所述,控制方案能满足电动汽车变频空调系统的应用需求,具有良好的工程应用价值。
[1] 闵海涛, 曹云波, 曾小华, 等. 电动汽车空调系统建模及对整车性能的影响[J]. 吉林大学学报(工学版), 2009, 39(3): 53-57.
[2] 唐景春, 左承基. 降低汽车空调涡旋压缩机排气温度的结构分析[J]. 中国机械工程, 2012, 23(2): 248-250.
[3] DUTTA R, RAHMAN M F. Design and Analysis of an Interior Permanent Magnet(IPM) Machine with Very Wide Constant Power Operation Range[J]. IEEE Transactions on Energy Conversion, 2008, 23(1): 25-33.
[4] BOLOGNANI S, CALLIGARO S, PETRELLA R, et al. Sensorless Control of IPM Motors in the Low-speed Range and at Standstill by HF Injection and DFT Processing[J]. IEEE Transactions on Industry Applications, 2011, 47(1): 96-104.
[5] RAGGL K, WARBERGER B, NUSSBAUMER T, et al. Robust Angle-sensorless Control of a PMSM Bearingless Pump[J]. IEEE Transactions on Industrial Electronics, 2009, 56(6): 2067-2085.
[6] 张猛, 李永东, 赵铁夫, 等. 一种减小变频空调压缩机低速范围内转速脉动的方法[J]. 电工技术学报, 2006, 21(7) : 99-104.
[7] BOSE B K. Modern Power Electronics and AC Drives[M]. Pearson Education North Asia Limited and China Machine Press, 2002.
[8] CHEN Zhiqian, TOMITA M, ICHIKAWA S, et al. Sensorless Control of Interior Permanent Magnet Synchronous Motor by Estimation of an Extended Electromotive Force[C].IEEE Industry Applications Conference, 2000, 3: 1814-1819.
[9] HASEGAWA M, HATTA H, MATSUI K. Adaptive Flux Observer on Stator Frame and Its Design Based on γ-Positive Real Problem for Sensorless IPM Drives [C].2nd Annual Conference of IEEE Industrial Electronics Society, IECON, 2005: 6-10.
[10] RACA D, HARKE M C, LORENZ R D. Robust Magnet Polarity Estimation for Initialization of PM Synchronous Machines with Near-zero Saliency[J]. IEEE Transactions on Industry Applications, 2008, 44(4): 1199-1209.
[11] BIANCHI N, BOLAGNANI S, JANG J H, et al. Advantages of Inset PM Machines for Zero-speed Sensorless Position Detection[J]. IEEE Transactions on Industry Applications, 2008, 44(4): 1190-1198.
[12] YOON Y D, SUL S K, MORIMOTO S, et al. High Bandwidth Sensorless Algorithm for AC Machines Based on Square-wave Type Voltage Injection[J]. IEEE Transactions on Industry Applications, 2011, 47(3): 1361-1370.
[13] 刘颖, 周波, 李帅, 等. 转子磁钢表贴式永磁同步电机转子初始位置检测[J]. 中国电机工程学报, 2011, 31(18): 48-54.
[14] Ion Boldea, Mihaela Codruta Paicu, Gheorghe-Daniel Andreescu, et al. “Active Flux” DTFC-SVM Sensorless Control of IPMSM[J]. IEEE Transactions on Energy Conversion, 2009, 24(2): 314-322.
[15] QIAO W, YANG X, GONG X. Wind Speed and Rotor Position Sensorless Control for Direct-drive PMG Wind Turbines[J]. IEEE Transactions on Industry Electronics, 2012, 48(1): 3-11.
[16] KIM H, SON J B, LEE J Y. A High-speed Sliding-mode Observer for the Sensor-less Speed Control of PMSM[J]. IEEE Transactions on Industry Electronics, 2011, 47(3): 1337-1343.
[17] 王庆龙, 张崇巍, 张兴. 基于变结构模型参考自适应系统的永磁同步电机转速辨识[J]. 中国电机工程学报, 2008, 28(9): 71-75.
An Experimental Study on the Position Sensorless Control of Electric Motor for Air-conditioning in Electric Vehicle
Wei Haifeng, Zhang Yi, Yang Kang & Gu Kai
SchoolofElectricalandInformation,JiangsuUniversityofScienceandTechnology,Zhenjiang212003
For meeting the engineering requirements of mobile air-conditioning in an electric vehicle, an integrated electric motor - scroll compressor is adopted and a position sensorless control scheme of permanent magnet synchronous motor in compressor is studied. Based on the traditional 3-stage start-up method, a position closed-loop link is added in between open-loop acceleration stage and speed closed-loop stage to improve switching reliability. In closed-loop operation stage, sliding mode observer is used to estimate the position and rotation speed of motor rotor. A large number of tests are carried out and the effectiveness and feasibility of the control scheme proposed are verified through the mutual validation among the results of test on parameters of phase current, bus current, rotation speed, torque, and power etc.
mobile air-conditioning; permanent magnet synchronous motor; sliding mode observer; sensorless operation
*国家自然科学基金(61503161)、极端条件下机械结构和材料科学国防重点学科实验室开放基金(201303)和江苏高校优势学科建设工程项目(苏政办发[2011]6号)资助。
原稿收到日期为2013 年12月13日,修改稿收到日期为2014年6月30日。
猜你喜欢
电工技术学报(2022年20期)2022-10-29
电气电子教学学报(2022年3期)2022-07-30
火力与指挥控制(2022年6期)2022-07-25
重庆理工大学学报(自然科学)(2022年5期)2022-06-18
飞控与探测(2022年2期)2022-06-11
水下无人系统学报(2021年6期)2022-01-15
计算机仿真(2021年3期)2021-11-17
小猕猴智力画刊(2021年2期)2021-02-22
北京航空航天大学学报(2020年10期)2020-11-14
新课程·上旬(2020年3期)2020-08-07
