电务轨旁设备外观巡检图像增强算法
2016-04-10 00:45杜馨瑜
中国铁道科学 2016年6期
杜馨瑜
(中国铁道科学研究院 基础设施检测研究所,北京 100081)
电务轨旁设备是构成铁路电务系统的重要基础设备,主要包括高柱信号机、矮柱信号机、信号标志牌、信号箱盒和隧道漏缆等。为了保证这些设备外观的完整性,需对其进行周期性的巡检。巡检的方法是:在巡检车上安装各种图像传感器,在地面安装高性能工作站;巡检车在巡检时对电务轨旁设备进行实时图像采集、显示,最后传送到工作站进行后期离线分析。由于巡检车一般是在夜间巡检,而沿线环境又较为复杂,导致采集的图像出现明暗不均等质量问题,严重时将影响图像的浏览,甚至导致后期不能对图像进行智能解析,因此需要对采集的原始图像进行图像增强处理。
常用的图像增强算法包括基于全局像素处理的gamma校正、直方图均衡等[1],以及基于局部邻域处理的一系列Retinex算法。Retinex算法是Land等模拟人类视觉系统(Human Vision System,HVS)提出的一种计算方法,用于解释HVS是如何从外界光照变化的环境中提取有效的真实信息[2]。Retinex算法有多种表现形式,如Land等最早提出的Retinex算法,是将通过当前像素点的各随机路径像素的平均值作为当前像素点的新值[3]。Horn[4],Hurlbert[5],Funt[6]等采取类似的基于路径比较的思想对Retinex算法做了改进。较为有影响力的是基于外周的Retinex算法,其思想在于处理后的像素值是其周边像素值某种形式的加权平均,如Land等提出的单尺度Retinex算法(Single-Scale Retinex,SSR)[7],Rahman等进而把该算法拓展到多尺度Retinex算法(Multi-Scale Retinex,MSR)[8]与多尺度多通道Retinex算法(Multi-scale and Multi-channel Retinex,MSMCR)[9]。另外还有变分形式的Retinex算法[10]。基于外周的Retinex算法,如上所述的SSR,MSR,MSMCR等算法,都是采取固定大小和形状的滤波器计算外周像素对待处理像素(即中心像素)的作用,而忽略了图像区域边缘对实际处理效果的影响。另外,各类Retinex算法都存在光晕现象和灰度溢出现象,前者原因是假设光源均匀分布导致在邻近区域亮度差异过大,从而引起处理后的图像存在亮区出现暗纹以及暗区出现亮纹的现象;后者原因是局部滤波器导致低对比度的暗区与亮区在处理后形成灰色区域[11]。
正是基于上述分析,本文将变尺度思想引入Retinex算法中,提出变尺度Retinex(Varying-Scale Retinex,VSR)算法。该算法所用局部滤波器的尺度随着原始图像的边缘变化而自适应改变,能在处理效果与抑制光晕及灰度溢出之间达到较为有效的平衡,校正图像局部光照的不均匀,显著提升图像的显示质量;通过与现有多种Retinex算法的比较,验证本文方法的优势。
1 VSR算法
VSR算法包括全局自适应、局部自适应和后处理3个子模块。算法流程框图如图1所示。以高柱信号机图像为例,原图及VSR算法处理结果如图2所示:图2(a)为输入的原图Φ,图2(b)为经过全局自适应处理后得到的灰度图Φ′,图2(c)为原图的边缘图像,图2(d)为由边缘图像得到的局部自适应模板图像mask,图2(e)为局部自适应处理后的图像Φnew,图2(f)为直方图拉伸后得到的输出图像newI。

图1 算法流程框图

图2 原图及VSR算法处理结果
1.1 全局自适应子模块
全局自适应子模块处理对象为输入的原始灰度图像,且灰度变化范围已经归一化。其自适应体现为:当输入图像亮度不够时,对其进行伽马校正,当亮度足够时则不进行调整。其目的在于对原始图像进行全局亮度粗调,以供后续模块精细处理。
全局自适应算法原理为
Φ′=Φ1/γ
(1)
其中
(2)
(3)
(4)
式中:1/γ为伽马校正系数;Фal和AL为哑元变量,作为中间结果变量,用于避免公式过分复杂;p为图像的某一像素点;Фp为p点的灰度;N为图像像素数。
式(4)表示对原图像取对数后得到均值AL;式(3)表示对AL实施非线性变换后得到Фal,并且Фal的值在1/3~1之间;式(2)表示若原图像亮度不够,则伽马校正系数1/γ限制在1/3~1之间,否则其值为1。全局自适应子模块输出图像如图2(b)所示。
1.2 局部自适应子模块
对于得到的中间结果图像Ф′,采用下式计算局部自适应。
Φnew(x,y)=log(Φ′(x,y))-
β(x,y)log(mask(x,y))
(5)
其中,
(6)
(7)
(8)
式中:(x,y)为图像坐标;Φnew(x,y)为Φnew中坐标(x,y)处的值;Ф′(x,y)为Ф′中坐标(x,y)处的值;mask(x,y)为mask中坐标(x,y)处的值;θ为mask中(x,y)点的滤波方向;r为滤波半径;rmax为最大滤波半径;σr,θ为高斯核大小;σ0和σ1为σr,θ的2个特定取值;β(x,y)为权重因子。
在式(5)中采用对数编码图像,其原因是为了模拟HVS特性曲线的对数特性,使之更加趋近人眼的视觉效果[12];权重因子β(x,y)用来调节该式右边2项的权重,以抑制经典的基于周边的Retinex算法的灰度溢出效应。
进一步的,式(6)可以使白色保持为白色,黑色保持为黑色,这样保证了视觉效果的真实性。当图像较亮时,β(x,y)趋于0,使式(5)中的减项趋于0,从而保持图像较亮;当图像较暗时,β(x,y)趋于1,使处理后的图像也较暗。因此,β(x,y)可以使中等亮度的像素值与原像素值呈现近似正相关拉伸的变化,并同时保证原图像的较亮区与较暗区基本不变,这样就抑制了灰度溢出效应。
经典的基于周边的Retinex算法的另一大缺点是光晕现象,其实质是由增加局部对比度与更好地实现全局图像绘制这两者之间的矛盾产生的。处理周边像素范围越小,局部对比度提升越明显,但在高对比度边缘越容易产生光晕伪迹;反之亦然[13]。
本文提出的VSR算法,能够在图像出现高对比度边缘时自适应地改变滤波器的大小和形状,从而最大限度地抑制光晕伪迹。这样,当变尺度滤波器沿着边缘处理时,图像的亮区对邻近的暗区产生较为微弱的作用。
式(8)表示:当环绕着待考察点(x,y)径向像素值求和时,若在θ方向上没有高对比度边缘,则高斯核取σ0,反之取σ1。
值得注意的是,当判断某点处有无高对比度边缘时,采用Canny算子对图像Ф′边缘进行检测、判断[14],得到的边缘图像如图2(c)所示。模板mask的图像如图2(d)所示。局部自适应子模块输出图像如图2(e)所示。
1.3 后处理——直方图截断拉伸
通过上述步骤的处理,可能有些点的灰度值超出了[0,1]区间,因此采用直方图截断、拉伸的后处理方法进行处理。即首先不考虑最暗与最亮端的1%像素点,这是直方图截断;然后再进行传统意义上的直方图均衡[15],这是直方图拉伸;从而得到最终的输出图像newI,如图2(f)所示。
2 基于实例的算法比较
2.1 客观评价指标
到目前为止,并没有一个统一的公认的图像质量评价标准,这也说明图像质量评价是一个主客观相结合的过程[16]。针对电务轨旁设备外观图像采集的实际情况,并考虑到后续智能分析的需求,客观评价指标选用局部对比度CL[17],由式(9)计算;CL的值越大,表明局部对比度越好,表明图像增强算法的处理效果越好,也就表明该算法越好。
(9)
2.2 指标对比
对电务轨旁设备的巡检图像,采用VSR算法进行图像增强处理,然后计算其局部对比度CL及其相对于原始图像局部对比度CL增大的百分比,并与若干具有代表性的方法进行对比,评价本文提出的VSR算法的合理性与优越性。这些代表性的方法包括:限制对比度自适应直方图均衡(Contrast-limited Adaptive Histogram Equalization, CLAHE)[18],引导滤波(Guided Filter, GF)[19],迭代Retinex(Iterative Retinex, IR)[11],SSR[12],MSR[13]和MSMCR[14]。计算结果见表1。从表1可以看到,对于典型的电务轨旁设备,VSR算法表现出最好的效果,CL增量高达106%~1 285%,见表1中黑色字体部分。

表1 轨旁各设备原图及各算法处理图的局部对比度及其增量CL
2.3 图像对比
1)高柱信号机
巡检车车顶面阵相机拍摄的高柱信号机图像具有如下特点:由于背景较为空旷,导致背景区基本无反射面;高柱信号机作为目标物体具有较强的反射面。图3(a)—(h)依次为高柱信号机的原图像及CLAHE,GF,IR,SSR,MSR,MSMCR和VSR算法处理图。由表1和图3可知,VSR算法处理图的局部对比度和清晰度均明显优于其他算法。这是因为:VSR算法消除了光照不均衡、光晕效应,并最大限度地抑制了灰度溢出效应;而CLAHE与GF算法没有消除局部的光照不均衡;IR算法产生了明显的光晕效应;SSR、MSR和MSMCR算法整体上消除了光照不均衡,但产生了灰度溢出效应。由此说明本文提出的VSR算法最优。

图3 高柱信号机的原图及不同算法处理图
2)矮柱信号机
当位于巡检车车顶的面阵相机拍摄矮柱信号机时,由于矮柱信号灯本身发光且周围场景较暗,因此图像具有较强的亮度不均匀性。图4(a)—(h)依次为矮柱信号机的原图及CLAHE,GF,IR,SSR,MSR,MSMCR,VSR算法处理图。由表1和图4可知,VSR算法明显优于其他算法。其原因与高柱信号机的相同,另外需要补充的是,VSR算法在图像的高光区(矮柱信号机发光区)与暗区均进行了较好的增强,并且有效地抑制了灰度溢出效应和光晕效应。

图4 矮柱信号机的原图及不同算法处理图
3)信号标志牌
信号标志牌的成像环境与高柱信号机类似,也表现为空旷的背景、标志牌较为平整的反射面易导致光照不均匀成像。图5(a)—(h)依次为信号标志牌的原图及CLAHE,GF,IR,SSR,MSR,MSMCR,VSR算法处理图。由表1和图5可知,VSR算法明显优于其他算法。其原因与高柱信号机的相同,这里就不再赘述。
4)信号箱盒
当位于巡检车车体下部的线阵相机拍摄轨旁信号箱盒时,图像的一部分背景为远端场景,信号箱盒部分为近端场景,且路面或信号箱盒会有反射,这时就有可能会出现光照不均匀现象。图6(a)—(h)依次为信号箱盒的原图及CLAHE,GF,IR,SSR,MSR,MSMCR,VSR算法处理图。由表1和图6可知,VSR算法明显优于其他算法。其原因与高柱信号机的相同,另外需要补充的是,VSR算法在图像的远端暗区与近端两区均对原图像进行了较好的增强,使远端暗区的树木清晰可见,近端亮区的信号箱盒边缘与导线更为明显,并且有效地抑制了灰度溢出效应和光晕效应。
5)隧道漏缆
巡检车车顶面阵相机拍摄隧道漏缆时,会出现图像较暗并有不均匀光照的情况。图像较暗的原因是拍摄漏缆与拍摄高柱信号机、接触网杆信号标志牌共用同一个面阵相机,这样在对焦与外加光源方面要有综合考虑;不均匀光照的原因是隧道壁具有较强的反射面,因此某些区域会出现镜面反射效应,尤其对图像全局增强处理后会更为明显。图7(a)—(h)依次为隧道漏缆的原图及CLAHE,GF,IR,SSR,MSR,MSMCR,VSR算法处理图。

图5 信号标志牌的原图及不同算法处理图

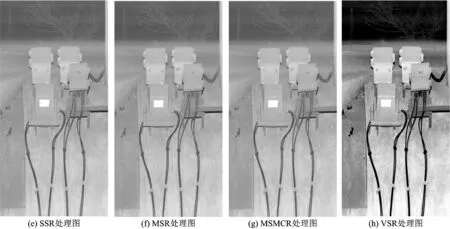
图6 信号箱的原图及不同算法处理图

图7 隧道漏缆的原图及不同算法处理图
由表1和图7可知,VSR算法明显优于其他算法。其原因与高柱信号机的相同,在此就不赘述。
3 结 论
本文将变尺度思想引入Retinex算法中,提出VSR算法,用于对电务轨旁设备外观巡检图像进行图像增强处理。选取高柱信号机、矮柱信号机、信号标志牌、信号箱盒、漏缆等电务轨旁设备的巡检图像,用VSR算法进行处理,并与具有类似功能的CLAHE,GF,IR,SSR,MSR,MSMCR算法的处理结果进行主客观对比。结果表明:无论是图像清晰度,还是局部对比度, VSR算法明显优于其他算法。VSR算法能有效校正巡检图像亮度局部不均匀现象,并最大限度地抑制灰度溢出效应与光晕效应,展示出由于图像局部亮度反差所掩饰的图像有用信息,提升图像显示质量。图像经过VSR算法增强处理后,有利于浏览及后续的智能分析。
[1]GONZALEZ R C, WOODS R E. Digital Image Processing [M].2nd ed. Beijing: Publishing House of Electronics Industry, 2003: 75-75.
[2]LAND E H. The Retinex [J]. American Scientist, 1964, 52(2): 247-264.
[3]LAND E H, MCCANN J J. Lightness and Retinex Theory [J]. Journal of the Optical Society of America, 1971, 61(1): 1-11.
[4]HORN B K P. Determining Lightness from an Image [J]. Computer Graphics and Image Processing, 1974, 3(4): 277-299.
[5]HURLBERT A. Formal Connections between Lightness Algorithms [J]. Journal of the Optical Society of America A, 1986, 3(10): 1684-1693.
[6]FUNT B, CIUREA F, MCCANN J. Retinex in MATLABTM[J]. Journal of Electronic Imaging, 2004,13(1): 48-57.
[7]LAND E H. An Alternative Technique for the Computation of the Designator in the Retinex Theory of Color Vision [J]. National Academy of Sciences of the United States of America, 1986, 83(10): 3078-3080.
[8]RAHMAN Z, JOBSON D, WOODELSS G.Retinex Processing for Automatic Image Enhancement [J]. Journal of Electronic Imaging, 2004, 13(1): 100-110.
[9]JOBSON D, RAHMAN A, WOODELL G. A Multiscale Retinex for Bridging the Gap between Color Images and the Human Observation of Scenes [J]. IEEE Transactions on Image Processing, 1997, 6(7): 965-976.
[10]KIMMEL R, ELAD E, SHAKED D, et al. A Variational Framework for Retinex [J]. International Journal of Computer Vision, 2003, 52(1): 7-23.
[11]MEYLAN L, SUSSTRUNK S. High Dynamic Range Image Rendering with a Retinex-Based Adaptive Filter [J]. IEEE Transactions on Image Processing, 2005, 15(9): 2820-2830.
[12]杜馨瑜. 模拟视觉机制的图像处理若干问题研究[D]. 成都: 电子科技大学, 2012.
(DU Xinyu. Research on Several Image Processing Problems [D]. Chengdu: University of Electronic Science and Technology of China, 2012. in Chinese)
[13]MAJUMDAR J, NANDI M, NAGABHUSHAN P. Retinex Algorithm with Reduced Halo Artifacts [J]. Defence Science Journal, 2011, 61(6): 559-566.
[14]CANNY J. A Computational Approach to Edge Detection [J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 1986, 8(6): 679-698.
[15]GONZALEZ R C, WOODS R E. Digital Image Processing[M]. 2nd ed. Beijing: Publishing House of Electronics Industry, 2003: 88-94.
[16]PANETTA K A, WHARTON E J, AGAIAN S S. Human Visual System-Based Image Enhancement and Logarithmic Contrast Measure [J]. IEEE Transactions on Systems, Man, and Cybernetics, Part B: Cybernetics, 2008, 38(1): 174-188.
[17]ARSLAN F T, GRIGORYAN A M. Fast Splitting α-Rooting Method of Image Enhancement: Tensor Representation [J]. IEEE Transactions on Image Processing, 2006, 15(11): 3375-3384.
[18]ZUIDERVELD K. Graphics Gems IV [M]. San Diego: Academic Press Professional Inc, 1994: 474-485.
[19]HE K, SUN J, TANG X. Guided Image Filtering [J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2013, 35(6): 1397-1409.
猜你喜欢
铁道通信信号(2020年5期)2020-09-21
铁道通信信号(2020年11期)2020-02-07
铁道通信信号(2019年9期)2019-11-25
铁道通信信号(2019年4期)2019-10-10
铁道通信信号(2018年11期)2019-01-19
铁道通信信号(2018年6期)2018-08-29
铁道通信信号(2018年5期)2018-06-28
铁道通信信号(2018年1期)2018-06-06
英语学习(2016年12期)2017-02-28
读者·校园版(2014年6期)2014-05-14