
轨道车辆内饰尺寸公差的快速测量方法及应用
2016-04-09 03:34王国平王燕生
新技术新工艺 2016年2期
关键词:机器视觉
敖 平,王国平,王燕生
(南车南京浦镇车辆有限公司,江苏 南京 210032)
轨道车辆内饰尺寸公差的快速测量方法及应用
敖平,王国平,王燕生
(南车南京浦镇车辆有限公司,江苏 南京 210032)
摘要:随着轨道交通行业的快速发展,各界对轨道车辆的制造要求也越来越高。轨道车辆内饰件装配是轨道车辆生产的重要质量控制点。内饰件装配的控制综合反映了轨道车辆产品开发和质量控制水平。利用基于结构光的视觉测量方法,实现了车辆内饰公差的快速测量,并能够实时显示被测物体的空间几何尺寸(角度、圆度和平面度等物理量),对于车体内饰的装配误差检测有着重要的意义。实时显示能够直观地显示配件或车体的误差,从而可以提高车辆的装配效率。
关键词:车辆内饰公差;机器视觉;结构光测量
轨道车辆内饰件装配是轨道车辆生产的重要质量控制点,其控制水平综合反映了轨道车辆产品的开发和质量控制水平,因此成为轨道交通车辆制造企业关注的焦点。轨道车辆制造周期中,在产品设计、工艺开发和生产阶段均会对内饰装配尺寸产生较大影响。
意大利的Spanesi公司、瑞典的Caroliner公司都开发了汽车车身电子测量系统,在测量精度和操作性方面具有一定的优势,利用激光和红外线扫描技术,可实现对车身三维尺寸的测量,满足了现代汽车维修业对检测技术的新要求[1]。智能扫描测量技术国内轨道车辆车体生产中的应用还较少见。研究车体空间尺寸自动化检测技术,实时显示空间几何尺寸(角度、圆度和平面度等物理量),对于车体内饰的装配误差检测有着重要意义,其能够直观显示配件或车体的误差,从而提高装配效率,减少返工次数。
本文提出了基于相位轮廓术的视觉测量方法,实现对轨道车辆内饰公差快速高效测量。轨道车辆内饰测量的检测设备需要轻便小巧,易于携带,故开发了一套手持式三维测量系统。利用面扫描装置,对车体内部的弧度、角度和平面度等空间几何尺寸完成测量,测量速度快,效率高,测量精度好,且检测结果可直观地显示在计算机屏幕上。
1测量原理
1.1相位计算
相位移的基本思想是通过采集有一定相移的多帧条纹图像来计算包含有被测物体表面三维信息的相位初值。假设条纹图像光强是标准正弦分布,则其光强分布函数为:
Ii(x,y)=I′(x,y)+I′(x,y)cos[φ(x,y)+δi]
(1)
式中,I′(x,y)是图像的平均灰度;I′(x,y)是图像的灰度调制;δi是图像的相位移;φ(x,y)是待计算的相对相位值(也被称为相位主值)。其中Ii(x,y)、I′(x,y)和(x,y)是3个未知量,因此,要计算φ(x,y)至少需要使用3张图像[2]。
目前,已有多种相移算法,但每种算法的稳定性和误差响应均不相同;因此,相位移算法的选取对相位计算及后续三维重建精度着有重要的影响。目前,相移算法主要有标准N步相移法或等间距满周期法、N帧平均算法、N+1步相移算法和任意等步长相移算法等[3]。
根据文献[4]的研究,标准N帧相移算法对系统的随机噪声具有最佳抑制作用,且对N-1次以下谐波误差不敏感,目前已成为结构光测量技术中广泛使用的一种相移算法。
本文采用标准的四步相移算法来计算光栅图像的相位主值,4幅光栅图像的相位移分别为0、π/2、π和3π/2,其光强表达式分别为:
(2)
光栅图像的相位主值计算式为:
(3)
标准四步相移算法的计算过程如图1所示。通过相位移算法计算出的相位主值在1个相位周期内是唯一的;但是由于在整个测量空间内有多个光栅条纹,且呈锯齿状分布,应对空间点的相位主值进行相位展开得到连续的绝对相位值。本文采用多频外差原理对相位进行展开[5],可得到每个像素的绝对相位值。

图1 标准四步相移算法的计算过程
1.2三维重构
计算出每个像素的绝对相位值后,根据相机间的极线几何约束,建立图像间的匹配关系,采用三角测量原理计算出该点的三维坐标(见图2)。
本文使用之前提出的系统参数标定算法[6]对结构光系统进行标定。2个相机的内部参数矩阵分别为Ac1和Ac2,外部参数矩阵分别为。根据小孔成像模型:

(4)
式中,sc1和sc2分别是2个相机的比例因子;(uc1,vc2)和(uc2,vc2)分别是2个图像的对应点坐标。根据式4可以确定被测点的三维坐标(Xw,Yw,Zw)。

图2 基于相位轮廓术的三维测量系统原理示意图
2测量流程
测量操作流程图如图3所示。首先,测量时使用投影仪向被测车辆投射1组光强呈正旋分布的光栅图像,同时使用相机拍摄经被测物体表面调制而变形的光栅图像;然后,利用拍摄得到的光栅图像,根据相移算法与多频外差解相法得到光栅图像的绝对相位值;最后,根据预先标定的系统参数或相位-高度映射关系,从绝对相位值计算出被测物体表面的三维点云数据[7]。通过对所获得的数据运用图像处理、平面拟合和立体空间几何原理求出所需求的几何尺寸,从而快速准确地实现平面度、角度、长度和圆弧度等的测量。利用基于相位轮廓术的视觉测量方法计算效率高,灵活性好,结果准确。
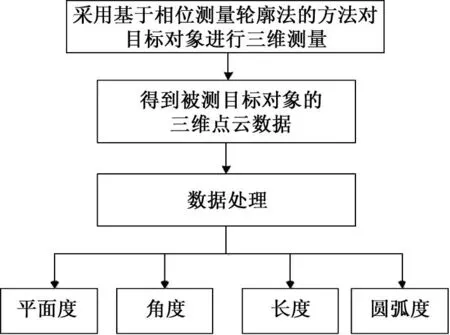
图3 测量操作流程图
2.1平面度测量
平面度测量是指被测实际表面对其理想平面的变动量。平面度误差是将被测实际表面与理想平面进行比较,两者之间的线值距离即为平面度误差值。忽略测量误差,将待测平面的点云数据视为被测实际表面的真实数据,将拟合出的平面视为理想平面。
采用特征向量估计法(EVE)确定拟合平面的参数初值。设待拟合平面的方程为:
ax+by+cz=d
(5)
式中,a、b、c是平面的单位法向量[a,b,c]中的元素,a2+b2+c2=1;d是坐标原点至平面的距离,d≥0。
设对某一平面进行扫描,得到n个数据点,则任意一数据点的三维坐标(xi,yi,zi)至最佳拟合平面的距离为:
di=|axi+byi+czi-d|
(6)
要想获得最佳拟合平面,则应在a2+b2+c2=1的条件下满足:
(7)
由拉格朗日乘数法得到目标函数:
(8)
式中,λ是拉格朗日乘数。
将式8分别对d、a、b和c求偏导,最终可得:
(9)

于是求解a、b、c的问题就转化为矩阵特征值及特征向量的解算问题,最终求解出平面参数的初始值a、b和c。计算所有点到拟合平面的距离标准偏差,并以作为阈值剔除到拟合平面距离过大的干扰噪声点;利用剩下的有效数据点重新计算拟合平面参数a、b和c;重复上述步骤直至所有点到拟合平面的距离都小于该次计算出的阈值,于是得到最佳拟合平面,即作为基准理想平面。
将各有效点的坐标带入平面方程中,判断该点位于平面上侧还是下侧;计算待测平面的上下偏差,得到待测平面的平面度。
2.2角度测量
角度测量即测量平面之间的夹角。相位测量轮廓法测量角度原理如图4所示。
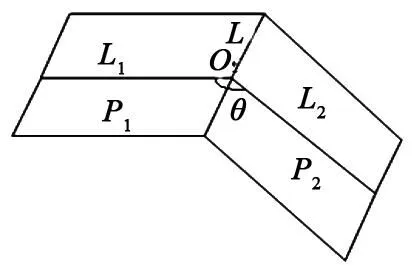
图4 角度测量原理
对得到的三维点云数据进行平面拟合,计算出平面P1和P2在世界坐标系下的坐标方程式,并求出P1与P2的交线L。任取L上的一点O,计算出平面P1上过O点且垂直于L的直线L1和P2上过O点且垂直于L的直线L2的坐标方程式,最后计算出L1与L2的夹角,即为所需要求出的角度。
2.3长度测量
长度测量主要有2种方法:1)应用角点检测,检测出拍摄图片上的角点并进行标记,然后计算出角点间的距离;2)对拍摄的图像进行边缘提取,提取出所要测量的物体的轮廓,然后拟合边缘轮廓点,得到边缘直线在世界坐标系下的方程式,再计算拟合直线之间的距离。
2.3.1角点检测
角点没有明确的数学定义,但普遍认为角点是二维图像亮度变化剧烈的点、图像边缘曲线上曲率的极大值点或2个及2个以上直线边缘以一定的角度相交的点。目前,角点检测的算法很多,主要采用Harris角点检测算法[8]。该算法研究图像中的一个局部窗口在不同方向进行少量的偏移后,窗口内的图像亮度值的平均变换。
Harris角点检测算子可以简单描述为在角点的某个邻域内,亮度的变化在任意一条通过该点的直线上都很大。对每一个待检测的像素点取窗口,从各个方向来计算该像素的非正则化自相关值,并且选择最小值作为这个像素点的角点响应函数。
2.3.2边缘检测
图像的边缘是指图像局部区域亮度变化显著的部分,该区域的灰度剖面一般可以看作是一个阶跃,即从一个很小的灰度值急剧变化到另一个与之相差较大的灰度值。要实现图像的边缘检测,应使用离散化梯度逼近函数,根据二维灰度矩阵梯度向量来寻找图像灰度矩阵的灰度跃变位置,然后在图像中将这些位置的点连起来就构成了所谓的图像边缘。边缘检测的步骤如下。
1)滤波。边缘检测算法主要是基于图像强度的一阶和二阶导数,但导数通常对噪声很敏感;因此,应采用滤波器来改善与噪声有关的边缘检测器性能。常见的滤波方法主要有高斯滤波,即采用离散化的高斯函数产生一组归一化的高斯核,然后基于高斯核函数对图像灰度矩阵的每一点进行加权求和。
2)增强。增强边缘的基础是确定图像各点邻域强度的变化值。增强算法可以将图像灰度点邻域强度值有显著变化的点凸显出来。
3)检测。经过增强的图像,往往邻域中有很多点的梯度值比较大,而在特定的应用中,这些点并不是所需要找的边缘点,所以应采用阈值化等方法来对这些点进行取舍。
2.4圆柱度测量
圆柱度是指圆柱面上的点到圆柱中心轴线之间的距离与圆柱半径之差[9]。空间圆柱面上的点到其轴线的距离理论值为R。
圆柱辅助示意图如图5所示,设(a1,b1,c1)为单位向量,任意观测点坐标为Pi(xi,yi,zi),α为PiP0与中心轴线的夹角,那么Pi到轴线上的垂直距离即为测得的实际半径R′:

图5 圆柱辅助示意图
(10)

误差方程可列为:
(12)
式中,v是坐标观测值残差。
引入最小二乘约束vTpv=min[10],解算方程组12;此外,为保证起始点坐标和轴线向量的唯一性,引入1个条件方程:
x0=average(X),y0=average(Y),z0=average(Z)
(13)
式中,average(X)、average(Y)和average(Z)分别为所有点的xi、yi和zi坐标的平均值。
采用实际测量数据,根据几何特性拟合圆柱面方法,计算出7个参数,计算圆柱度,即误差方程中的v,作为圆柱面拟合好坏的一个衡量标准。
3试验验证
为了验证该方法测量车辆内饰的可行性和测量数据的精度,测量的实物是铣加工出的标准零件。测量场景和软件界面如图6所示。软件运行平台为Windows8 (64位)/Windows7 (64位)/WindowsVistaSP1 (64位),硬件需求内存为8GB以上,硬盘容量为5GB以上。试验测量中,测量了零件的长度、圆度和平面度等数据。试验测量结果如图7所示,和游标卡尺所测的数据进行对比,对比结果见表1。
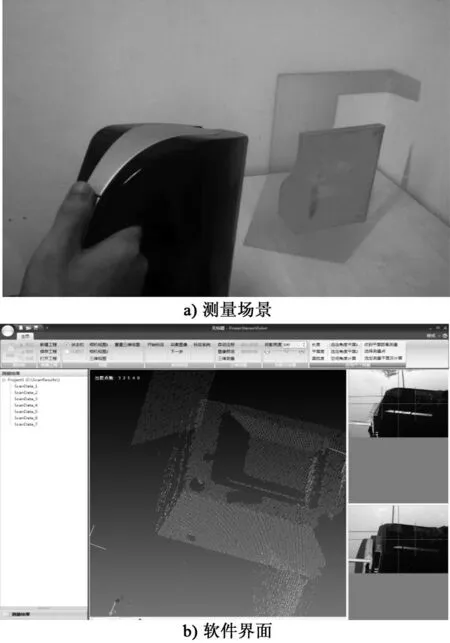
图6 测量场景和软件界面

图7 实物测量结果

测量项目试验测量值实际测量值长度/mm95.30094.380角度/(°)89.46090.000平面度/mm0.1660.200圆度(直径)/mm103.460102.800
上述测量结果表明,采用基于面结构光的三维测量方法测量车体内饰尺寸,误差小,精度高,能满足装配尺寸公差的测量要求,和传统的测量方法相比更易于操作,且具备分析弧度、角度和平面度等空间几何尺寸的功能
4结语
通过基于相位轮廓术的三维测量方法,可以快速获得被测物体的三维点云数据,对部分点云的平面拟合可以计算出测量平面在世界坐标系下的方程,从而计算出平面度,并可以通过拟合2个平面,计算出这2个平面的夹角。通过对圆弧段点云进行处理,计算出圆弧段圆的方程式,可以进一步计算出圆弧度,实现圆弧度的测量。应用角点检测和边缘提取方法可以快速高效地检测出被测物体的特征,从而计算出所需测量的长度。这些算法成熟、稳定和高效,能够很好地适用于轨道车辆内饰件的尺寸检测。
参考文献
[1] 杨凤春,吴旺青,于国丞. 激光扫描在轨道限界检测中的应用[J].现代城市轨道交通,2007(2): 31-32,74.
[2] 李中伟. 基于数字光栅投影的结构光三维测量技术与系统研究[D].武汉:华中科技大学, 2009.
[3] 周利兵.PMP中相移算法与误差分析研究[D]. 成都:四川大学, 2003.
[4]SurrelY.Designofalgorithmsforphasemeasurementsbytheuseofphasestepping[J].AppliedOptics, 1996, 35(1): 51-60.
[5]LiZW,ShiYS,WangCJ,etal.Accuratecalibrationmethodforastructuredlightsystem[J].OpticalEngineering, 2008, 47(5):525-534.
[6] 李中伟,王从军,史玉升. 3D测量系统中的高精度摄像机标定算法[J].光电工程, 2008,35(4): 58-63.
[7] 湛承诚,徐志强,王从军,等. 基于结构光测量技术的三维人像建模[J]. 新技术新工艺, 2011(5): 93-95.
[8] 张小洪,李博,杨丹. 一种新的Harris多尺度角点检测[J]. 电子与信息学报, 2007(7): 1735-1738.
[9] 赵茜,王东霞,刘兰英. 圆柱度误差及其评定方法综述[J]. 计量与测试技术, 2006(12): 1-2.
[10] 王穗辉. 误差理论与测量平差[M]. 上海: 同济大学出版社, 2010.
责任编辑郑练
Rapid Measurement Methods and Application of Rail Vehicles’ Interiors Dimensional Tolerances
AO Ping, WANG Guoping, WANG Yansheng
(Nanjing SR Puzhen Rail Transport Co., Ltd., Nanjing 210032, China)
Abstract:With the booming development of rail transit industry, there is more of a requirement to the manufacturing of railway vehicles. The assembly of interiors plays an important role of deciding the quality of railway vehicles production. Assembly control of interiors also reflects the level of product development and quality control. Rapid measurement of railway vehicles’ interiors dimensional tolerances has been realized by a kind of visual measurement methods based on structured light. It also can display the objects’ size, angle, roundness, flatness and other physical quantities in real time, which is of great significance to the vehicles’ assembly error detection. The display in real time gives a chance to observe the error of replacement or vehicles body directly and the assembly efficiency will be improved.
Key words:railway vehicles interiors measurement, machine vision, structured light measurement
收稿日期:2015-07-28
作者简介:敖平(1984-),男,工程师,主要从事车辆制造等方面的研究。
中图分类号:TN 209
文献标志码:A
猜你喜欢
软件导刊(2016年11期)2016-12-22
电脑知识与技术(2016年28期)2016-12-21
科技视界(2016年26期)2016-12-17
科教导刊(2016年25期)2016-11-15
软件工程(2016年8期)2016-10-25
科技视界(2016年20期)2016-09-29
科技视界(2016年6期)2016-07-12
科技视界(2016年15期)2016-06-30
科技视界(2016年16期)2016-06-29
企业导报(2016年10期)2016-06-04
