
新型编码式太阳敏感器误差分析与修正方法研究*
2016-04-06 11:20:31莫亚男吕政欣
空间控制技术与应用 2016年2期
赵 媛,莫亚男,吕政欣
(北京控制工程研究所,北京100190)
新型编码式太阳敏感器误差分析与修正方法研究*
赵 媛,莫亚男,吕政欣
(北京控制工程研究所,北京100190)
原有的太阳敏感器采用多项式拟合进行误差补偿,标定精度较低.通过建模精确分析新型太阳敏感器各误差源的影响,提出一种新型误差标定方法,用于补偿太阳敏感器的几何误差,并给出了误差补偿方法.实验结果表明:该方法比标定前精度提高3倍以上.
太阳敏感器;误差补偿;标定方法
0 引 言
编码式太阳敏感器以其大视场、高可靠、长寿命等优点广泛应用于各类高、中、低轨道航天器.目前中国卫星90%以上安装了此类编码式太阳敏感器.为适应未来宇航发展需求,太阳敏感器不断追求小型化、高精度以及轻质量的技术途径.
本文从太阳敏感器设计原理、生产加工和测试等多方面分析,总结归纳了新型编码式太阳敏感器误差分类、误差产生的原因及其测试标定测试方法.
1 工作原理
传统的编码式太阳敏感器[1]由于没有采用误差补偿技术,仅通过加工装调工艺无法保证优于0.05°(3σ)的高精度测量要求.
新型编码式太阳敏感器是在DSS-SiC-1型的研制基础上采用小型化设计[2],小型化设计后探头部分尺寸仅为传统探头尺寸的2/3.编码式太阳敏感器的工作原理见图1.光线透过柱面镜玻璃底部的透光狭缝和码盘玻璃,成像在码盘玻璃的下表面,经硅光电池产生粗码、细码、全开码和监视码等13道感应电流[3].
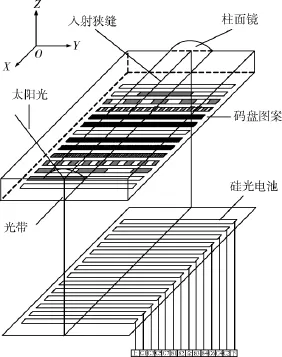
图1 编码式太阳敏感器工作原理图Fig.1 Principle map of coded sun sensor
2 误差分析
小型编码式太阳敏感器探头组件的主要设计指标如表1所示.通过分析小型太阳敏感器的设计、加工、装配和环境影响等因素,从产生误差的原因可以概括地分类如图2所示.下文将按图2所示的各误差项逐一展开分析.

表1 光学探头组件的主要设计指标Tab.1 The main design targets of optical head module
2.1 光学探头的细码换算误差
光线通过柱面镜下表面的透光狭缝后将发生光学衍射,因高斯波形的高阶分量能量很小,形成几何级能量衰减.如果考虑高斯波形的高阶分量影响,经过推导[4],细码角度的换算误差Δα可近似表示为

其中x为2°,α1为基波系数,α3为三次谐波系数.

图2 太阳敏感器误差树Fig.2 Sun sensor error tree
DSS-SiC-1型传统产品的误差分布早在1999年高轨道“东三”卫星在轨遥测数据的误差曲线以及产品在地面测试中都得到验证,由公式(1)可以看出在0°~0.5°范围内误差分布呈现正弦变化规律,正是由于传统产品具有此种误差变化规律,通过对0°~0.5°(1'步距)内的角度进行误差标定并补偿,在±60°视场范围内可将产品精度(3σ)提高50%以上,数据补偿前后的波形图见图3所示.

图3 DSS-SiC-1型光学探头细码误差分析Fig.3 Fine error analysis of DSS-SiC-1 optical head
那么,如果将上述误差补偿方法用在小型编码式太阳敏感器上,误差补偿前后的数据分析如图4所示.

图4 小型光学探头细码误差分析Fig.4 Fine error analysis of the miniature optical head
通过图4分析,细码补偿后精度提高不显著,细码角度计算误差在小型探头的综合误差中不是主要误差.小型探头正弦波不光滑,所以在误差系统中仍有其他误差因素的存在影响误差曲线的光滑性,采用传统的误差补偿方法不可行.
2.2 线路中AD转换误差
因线路使用0~5 V的8位AD转换器,1 LSB≈20 mV.当太阳光以大角度最入射时,线路的信噪比最差.假设太阳光入射角最大在64°时,F1=0 V、F2=0.85 V、F3=1.7 V、F4=0.85 V,可以计算出角度误差Δα为

2.3 光学探头中光电池的电流响应不均匀性
码盘光电池电流响应的不均匀性会导致码道输出电流的幅度产生误差,从而引起细码一致性误差.
对±3%的细码电流幅度误差进行仿真分析,细码±3%的不一致性可造成约±24″误差.
2.4 光学探头中码盘玻璃厚度偏差
假设.码盘玻璃厚度无加工误差时,设光线的入射角度为α,光线照射到码盘玻璃下表面的位置设为Δx;如果码盘玻璃厚度有Δh的加工偏差,当光线照射到码盘玻璃下表面的位置仍保持Δx,则此位置对应的光线入射角为α',光线的入射角变化量设为Δα.建立如图5所示的光路图分析.

图5 码盘玻璃厚度偏差Fig.5 Thickness error of coded glass
根据上述有

通过式(2)和(3)可以推导出

从式(4)分析,当码盘玻璃厚度偏差Δh越小,码盘玻璃的厚度h越大,测量误差越小.
2.5 光学探头中码盘玻璃相对透光狭缝水平偏移

从式(5)分析:当码盘玻璃厚度h值越大,码盘玻璃相对柱面镜透光狭缝的水平偏移Δx越小,测角误差越小.
2.6 光学探头中柱面镜厚度偏差
根据设计要求:柱面镜曲率半径R为4.124±0.002mm;厚度为R±Δd,厚度偏差Δd为0.003mm;玻璃折射率为n.参考图5方法建模分析,有

从式(6)分析:当柱面镜曲率半径R值越大,柱面镜厚度偏差越小,测量误差越小.
2.7 光学探头中柱面镜下表面光缝光刻偏心
根据设计要求:柱面镜曲率半径R为4.124± 0.002mm;柱面镜的光缝偏心Δx为±0.003mm;玻璃折射率为n.参考上图5方法建模分析,有

从式(7)分析:当柱面镜曲率半径R值越大,柱面镜下表面光刻的光缝偏心Δx就越小,测量误差越小.
3 误差分析总结
针对上述误差源建模分析,对上面可定量分析的误差项进行总结归纳,具体见表2所示.

表2 误差项分析Tab.2 Error item analysis
经表2分析可见,码盘玻璃厚度和码盘玻璃相对柱面镜透光狭缝的水平偏移量所占综合误差比例较大,所以可以通过建立误差补偿公式,减少这两种误差因素的影响,从而提高敏感器的综合精度.
4 建立误差补偿公式
假设.码盘玻璃厚度不计加工误差时,设光线的入射角度为α,光线照射到码盘玻璃下表面的位置设为Δx1.
如果码盘玻璃厚度有Δh的偏差,码盘玻璃水平偏移Δx(即原码盘玻璃的中心轴O1距现码盘玻璃的中心O2偏移Δx),当光线照射到码盘玻璃下表面的位置仍保持距柱面镜O1偏心Δx1的距离,则原入射角度α的光线实际照射到现码盘玻璃(现码盘玻璃的中心为O2)下表面的Δx2位置,此Δx2位置对应的光线入射角为α',光路分析见图6所示.
通过对图6所示的光路进行建模分析,有

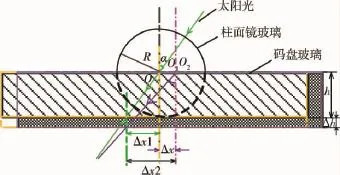
图6 光路图Fig.6 Light path picture
同时为有效剔除常值误差θ影响,上述公式可写为

综合式(1)和式(2),最终公式为

式(13)中共有 3个参数:K1、K2和K3.该式(13)即为综合误差补偿公式.
5 误差补偿分析
利用高精度转台、太阳模拟器及处理计算机构搭建相应的标定系统[5-6],完成相应的标定以及测试工作.经过数据分析,系统误差补偿后常值误差得到修正(常值误差为图7中的虚线所示),综合精度为补偿前的3倍以上,图7为当测量角α=0°时误差补偿前后的测量精度对比图.系统误差补偿前: 3σ≈0.11°;系统误差补偿后:3σ≈0.03°.系统误差补偿后常值误差得到修正,综合精度为补偿前的3倍.
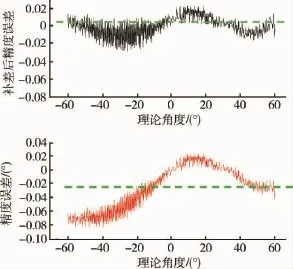
图7 误差补偿前后精度对比图Fig.7 Comparison picture of error compensation before and after
6 结 论
目前,卫星上安装的太阳敏感器主要包括:CCD太阳敏感器、APS太阳敏感器、粗太阳敏感器和编码式太阳敏感器等.CCD、APS和粗太阳敏感器一般采用多项式逼近方法进行综合误差补偿[7-8],此传统方法误差补偿效率低,补偿无针对性,未能剥离各项误差影响.
此误差修正方法是通过在分析系统内各误差源影响,对所占综合误差贡献比例较大的误差项提出系统误差补偿方案:补偿公式仅使用3个补偿参数,可有效修正常值误差,针对性强,补偿效果显著.
本文可为太阳敏感器及其他光电类敏感器的误差修正方法提供新思路,为提高敏感器综合精度开辟新途径.
[1]莫亚男,赵媛,刘鑫.基于FPGA的小型一体化编码式太阳敏感器信号处理技术[J].第一届空间视觉测量敏感器学术交流会论文集,2012:253-254.MO Y N,ZHAO Y,LIU X.The signal processing technology of integrative coded sun sensor based on FPGA[J].The First Space Vision Measuring Sensor Academic Exchange,2012:253-254.
[2]MO Y N,CUI J,ZHAO Y,et al.Design and realization of the miniature long-life integrative coded sun sensor[C]//Proceeding of SPIE.Washington D.C.: SPIE,2013:23-26.
[3]杜永超,刘春明,欧伟.空间太阳敏感器用硅光电池[C]//第十七届全国半导体集成电路、硅材料学术会议.三亚:中国电子学会,2011:207-208.
[4]徐明庚,王素素,鲍百容,等.卫星姿态动力学与控制[M].北京:宇航出版社,2003.
[5]张媛,熊剑平,太阳敏感器标定测试实验及数据处理分析[C]//北京力学会第十九届学术年会.北京:北京力学会,2013:301-302.ZHANG Y,XIONG J,et al.Calibration test experiment and data processing analysis of sun sensor[C]//The 19thacademic conference on Beijing Society of Theoretical and Applied Mechanics.Beijing:Beijing mechanics,2013:301-302.
[6]樊巧云,张广军,魏新国.内外参数精确建模的太阳敏感器标定[J].北京航空航天大学学报,2011,37 (10):1295-1296.FAN Q Y,ZHANG G J,WEI X G.Sun sensor calibration based on exact modeling with intrinsic and extrinsic parameters[J].Journal of Beijing University of Aeronautics and Astronautics,2011,37(10):1295-1296.
[7]STRIETIED R.Two-dimensional calibration of a sun attitude sensor[C]//The 15thTriennial World Congress.Spain:IFAC,2002:259-264.
[8]余成武,贾锦忠,吕政欣,等.CCD太阳敏器误差分析与标定方法研究[C]//全国第十二届空间及运动体控制技术学术年会论文.桂林:中国宇航学会和自动化学会,2006:495-499.YU C W,JIA J Z,LV Z X,et al.Error analyzed and calibration method of CCD sun sensor[C]//The 12thAnnual Conference of Aerospace and Moving Object Control Technology.Guilin:CSA and CAA,2006:495-499.
Error Analysis and Modify Method of the New Coded Sun Sensor
ZHAO Yuan,MO Yanan,LV Zhengxin
(Beijing Institute of Control Engineering,Beijing 100190,China)
Polynomial fitting method is usually used to compensate the error of sun sensors,and the calibration precision is relatively low.According to the modeling analysis of the influence of various error sources,a new calibration method is proposed,and an error compensation method is provided to compensate the geometric error.The experimental results show that the calibration accuracy is over 3 times higher than the ordinary one.
sun sensor;error compensation;calibration method
V448.2
:A
:1674-1579(2016)02-0038-05
10.3969/j.issn.1674-1579.2016.02.007
赵 媛(1984—),女,工程师,研究方向为光学敏感器设计;莫亚男(1971—),女,高级工程师,研究方向为光学敏感器设计;吕政欣(1976—)男,高级工程师,研究方向为光学敏感器设计及测试.
*中国第二代卫星导航系统重大专项资助项目(GFZX0301030108).
2015-12-01
猜你喜欢
机械设计与制造(2022年4期)2022-04-28 04:32:10
汽车维修与保养(2020年11期)2020-06-09 05:42:16
科技视界(2019年11期)2019-06-20 01:22:08
现代计算机(2019年11期)2019-05-27 01:18:58
邵阳学院学报(自然科学版)(2019年3期)2019-05-04 04:12:48
电脑与电信(2018年11期)2018-02-16 05:41:16
中国惯性技术学报(2017年1期)2017-06-09 08:15:14
光学精密工程(2016年3期)2016-11-07 09:03:34
新媒体研究(2014年21期)2014-12-16 20:45:26
西安建筑科技大学学报(自然科学版)(2014年6期)2014-11-10 02:35:38
