基于扩展状态观测器的过热汽温控制
2016-03-30 08:52张青月王东风
华北电力大学学报(自然科学版) 2016年1期
张青月,王东风
(华北电力大学 控制与计算机工程学院,河北 保定 071003)
基于扩展状态观测器的过热汽温控制
张青月,王东风
(华北电力大学 控制与计算机工程学院,河北 保定 071003)
摘要:以火电厂过热蒸汽温度控制系统为背景,针对被控对象的大惯性、大迟延特性以及常规状态反馈控制不能消除稳态误差的问题,提出了带有误差积分反馈的观测器-状态反馈控制方案。针对被控对象阶次认知的不确定性,分别设计了不同阶次的状态观测器对系统的状态进行重构,进而构成状态反馈控制。仿真结果表明:过热汽温控制系统采用带有误差积分反馈的观测器-状态反馈控制策略时,具有较好的控制品质,且当观测器的阶次大于被控对象阶次时,控制效果要好于观测器的阶次小于被控对象阶次时;而观测器的阶次等于被控对象阶次时,控制效果是最好的。
关键词:状态观测器;误差积分反馈;观测器阶次;过热汽温
0引言
在现代火力发电厂的热工过程控制系统中,锅炉过热蒸汽出口温度是锅炉的主要参数之一,过高过低都会影响电厂生产运行的安全性与经济性。因此,必须将过热汽温(主汽温)严格控制在给定值附近,工艺上对过热汽温控制系统的质量要求非常严格。
过热器是具有集总参数的对象,故可以把总热流量、总金属量、总容积等看作是无穷多个单容对象串联形成的多容对象。当喷水量发生变化后,需要通过这些串联的单容对象,最终引起出口蒸汽温度的变化,所以过热汽温的响应有很大迟延。同时,影响过热器出口汽温的因素很多,其动态特性是大惯性、大迟延以及参数严重不确定性,属于较难控的一类热工对象,所以提高主汽温控制品质仍是当今控制领域的一个研究热点。常规的PID串级控制[1-2]效果并不令人满意,当锅炉负荷变化而使被控对象动态特性发生较大的摄动时,控制品质严重下降。除此之外,国内外学者进行了多方位的探索与研究,提出了许多智能控制方案[3-8],取得了丰硕成果,但实际应用到现场的只是针对部分个案。
现代控制理论经过几十年的发展已经在许多领域表现出了相对于经典控制理论的优越性,并在现代工业控制中发挥着重要作用。现代控制理论是用系统内部的状态来描述系统的,从而可以从系统的状态引出信号作为反馈量。然而系统的状态变量不是都能用物理方法测量得到的,因而给状态反馈的物理实现造成了困难,这就需要设计一个状态观测器,设计过程无需增加硬件成本,但是需要一个模型。通常模型和被控对象的数学表达式是一样的形式,然而对于一个实际的被控对象,我们往往并不知道它的系统阶次确切的等于多少,可能只是知道一个大概的阶次并基于这个大概的阶次结构进行参数的辨识,或者利用优化的算法去得到一个近似的模型(包括模型的阶次和参数),因此我们有必要研究模型和被控对象阶次不同的情况。鉴于此,本文以过热蒸汽温度为被控对象,应用不同阶次的高阶惯性环节状态观测器对其进行状态重构。然而常规的状态反馈控制并不能消除稳态误差,需要进一步进行控制器的综合,本文引入误差的积分反馈作用进行综合,并比较了观测器在不同阶次下对基于观测器的状态反馈控制的影响。
1观测器-状态反馈控制
1.1观测器-状态反馈控制原理
状态反馈的基本特点是采用对状态向量的线性反馈律来构成闭环控制系统,由于控制作用是系统状态的函数,可使控制效果得到很大的改善,从而具有比输出反馈更好的一系列控制特性。然而系统的状态变量不是都能用物理方法测量得到的,因而需要设计一个状态观测器为状态反馈的物理实现创造条件。观测器-状态反馈控制原理图如图1示。
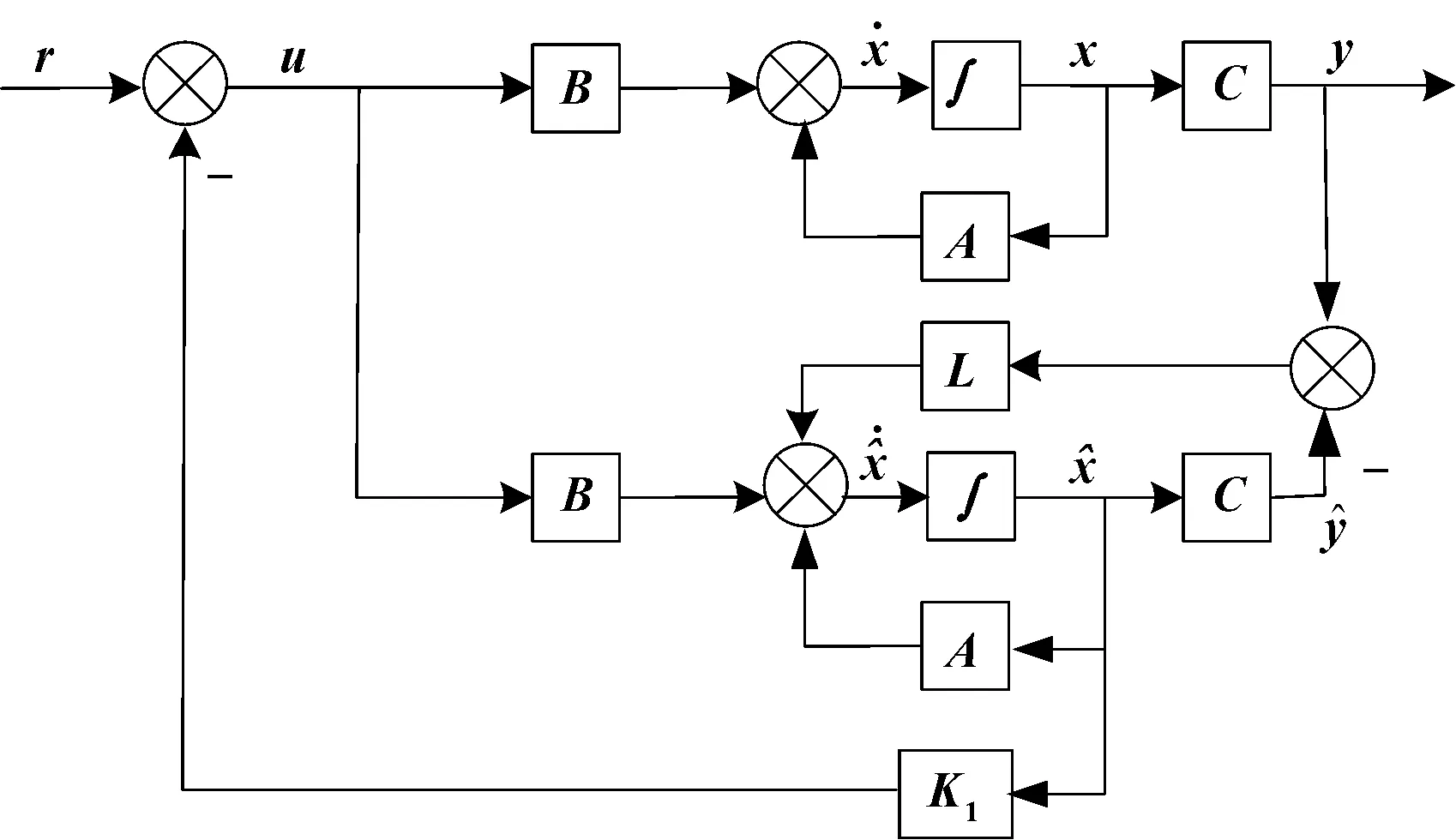
图1 基本的观测器-状态反馈控制原理图Fig.1 Schematic diagram of observer-state feedback control
考虑线性系统的状态方程和输出方程为
(1)
不失一般性,在此以单输入-单输出系统进行讨论,式中x是n×1维状态向量;u、y分别为1维输入与输出向量,即为标量;r是参考输入量;A是n×n维系统矩阵;B是n×1维输入矩阵;C是1×n维输出矩阵;D是直联矩阵,一般情况下D=0;K1是状态反馈矩阵;L是状态观测器的增益矩阵。
(2)
1.2带有误差积分反馈的观测器-状态反馈控制原理
通常所用的常规状态反馈也即常数增益状态反馈可以达到改善被控对象动态特性的目的,然而单纯的使用常数增益状态反馈进行控制,系统会存在一定的静差,需要进一步进行控制器的综合,比如文献[11]使用PID综合以及文献[12]使用比例系数可调的放大器综合,即都仍面临控制器参数整定的问题。本文在常数增益状态反馈系统中引入误差的积分控制作用,构成带有误差积分反馈的观测器-状态反馈控制系统。由于误差积分环节的引入使得系统在稳定以后输出值得以跟踪设定值,达到零静差输出。
令闭环控制系统的控制量为
(3)
式中:K2是误差反馈系数,图2给出了采用这种控制策略的反馈控制系统结构框图。当K2=0 时,该系统就退化为图1基于观测器的常数增益状态反馈控制系统。
将(3)式代入(1)式后得带有误差积分反馈的观测器状态反馈闭环系统的状态空间表达式为
(4)
式中:xe表示误差积分器输出的状态向量。
或者

(5)

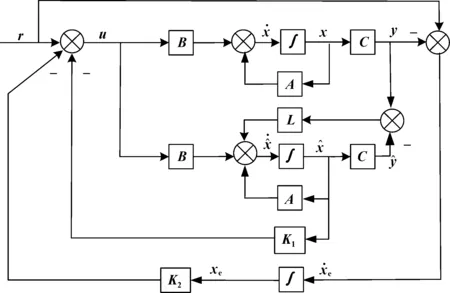
图2 带有误差积分反馈的观测器-状态反馈控制原理图Fig.2 Schematic diagram of observer with error integral feedback-state feedback control

2过热汽温系统动态特性
过热器是具有集总参数的对象,文献[9]具体阐述了集总参数模型的建立过程。将整个过热器划分为n段,对每一分段简化为一阶惯性环节,整个过热器就是n阶惯性环节串联。此时若以锅炉过热器蒸汽温度为被控对象,可应用高阶惯性环节的状态观测器对其进行状态重构,进而进行状态反馈控制,此方法在理论和工程应用中已取得了很好的效果[10]。在实际的工程环境下,系统阶的概念较难定义,要断定模型的阶数是否最低比较困难,主要原因在于噪声效应。在辨识过程中,噪声的动态特性往往包含在过程的模型中而一起被估计出来。对此,我们设计了不同阶次的状态观测器来完成状态重构。

通过选择矩阵L和k1分别将观测器控制器的极点配置到模型极点的4倍和2倍的位置。单纯的使用常数增益状态反馈进行控制,系统会存在一定的静差,需引入误差的积分控制作用,使得静差得以消除。
3基于扩展状态观测器的锅炉过热汽温系统的仿真分析
对过热汽温控制系统分别设计基于扩展状态观测器的状态反馈控制和常规状态反馈控制,分别施加一个单位阶跃输入信号,此外,对基于扩展状态观测器的状态反馈控制系统每隔400 s加入单位阶跃的输出扰动,观察被控对象的输出情况,仿真结果如图3所示。从图中可知单纯的状态反馈控制并不能保证过热器出口温度无静差,需引入误差的积分反馈作用方可消除,且基于扩展状态观测器的状态反馈控制系统能较好地克服扰动,具有较强的抗干扰能力。并将带有误差积分反馈的观测器-状态反馈控制系统与PID串级控制系统比较。从图中可以看出带有误差积分反馈的观测器-状态反馈控制系统的调节时间缩短,同时超调量减小,其控制效果明显优于传统的PID串级控制系统。
4观测器阶次变化对控制性能的影响仿真研究
4.1不同阶次观测器的阶跃响应
在t=0时刻对系统设定值施加单位阶跃扰动,各观测器的响应曲线如图4所示,即可得观测器与被控对象匹配情况。由图可知,观测器与被控对象的动态特性十分相似,且观测器为5阶时与被控对象的匹配效果比3阶更好,阶跃响应曲线上升时间比较短,可以更快的趋于稳定。
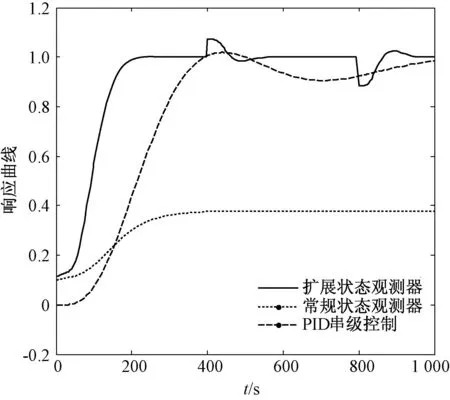
图3 基于扩展状态观测器的状态反馈控制阶跃响应曲线Fig.3 Step response curves of the extended observer-based state feedback control system
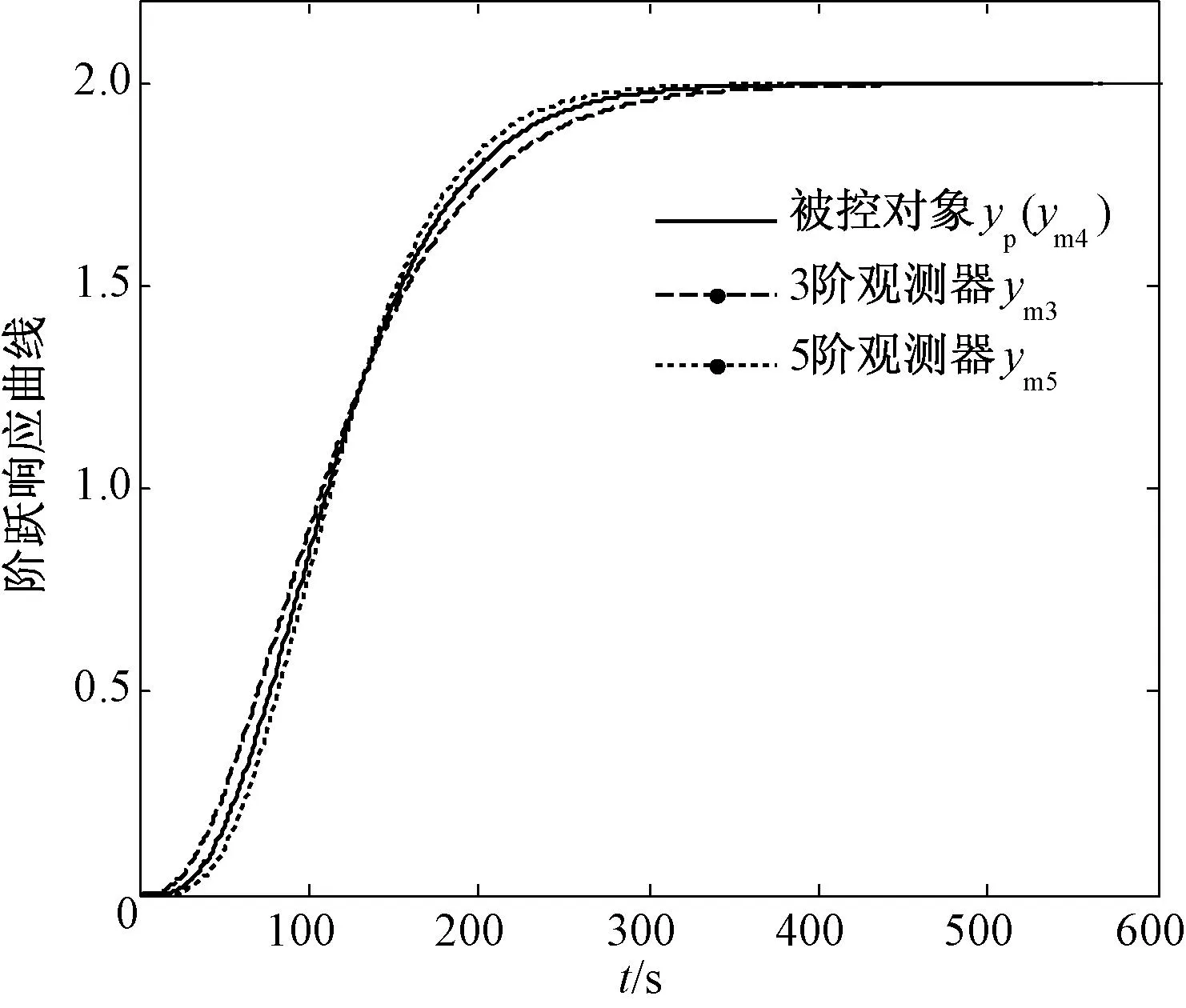
图4 不同阶次观测器阶跃响应曲线Fig.4 Step response curves of different order observers
4.2基于不同阶次观测器的控制效果仿真分析
在不同阶次状态观测器反馈控制下,对控制系统施加一个幅值为1的方波输入信号,观察系统在有无误差积分反馈作用下被控对象输出yp(t)、观测器与控制器输出的误差e(t)以及控制器输出u(t)的情况。
4.2.1被控对象4阶-观测器4阶
当观测器模型与被控对象同阶即为4阶系统时,无误差积分反馈时的仿真结果如图5所示,有误差积分反馈时的仿真结果如图6所示。从图中可以看出,在未加入误差积分反馈时,被控对象的输出能很快趋于稳定,且与观测器输出误差较小,起始阶段控制器波动较小并很快趋于0,但系统最终输出有静差;在引入误差积分反馈以后,输出得以跟踪设定值,即稳态误差为零,但此时控制器的输出在初始阶段的波动幅度加大。
4.2.2被控对象4阶-观测器3阶
当观测器模型比被控对象低一阶即为3阶系统时,仿真结果无误差积分反馈时如图7所示,有误差积分反馈时如图8所示。相比观测器为4阶时,在未加入误差积分反馈时,被控对象输出与观测器输出的误差较大,系统存在静差;引入误差积分反馈以后,被控对象输出一直存在上下波动,且与观测器输出间的误差较大,观测效果不佳,控制器输出也不能得到稳定,控制品质较差。
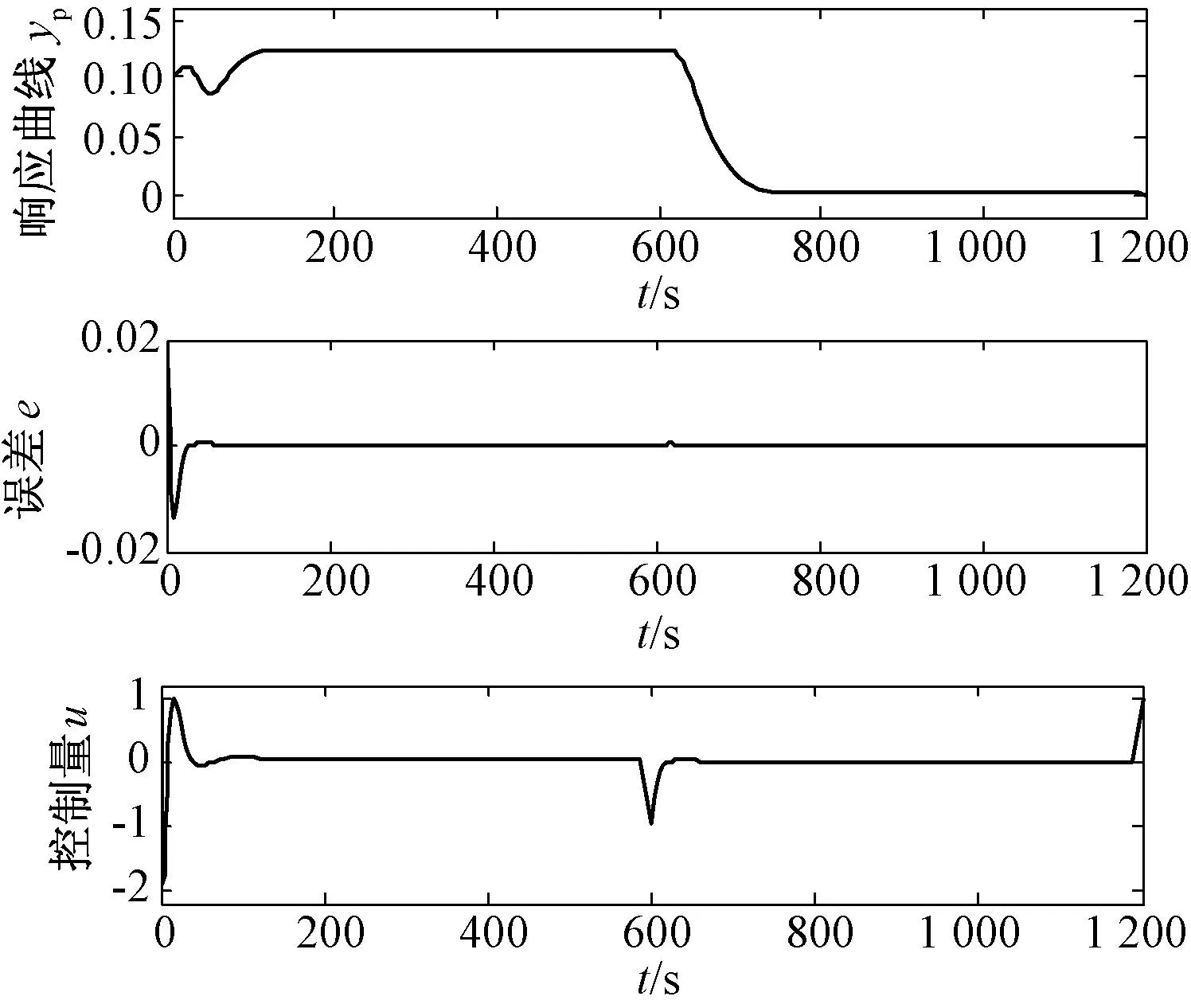
图5 状态观测器4阶时的控制效果(不含误差积分反馈)Fig.5 Control results with fourth order state observer (without error integral feedback)
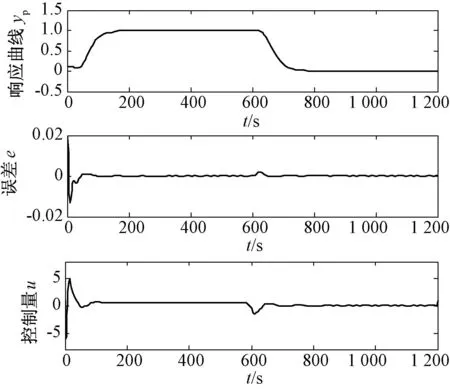
图6 状态观测器4阶时的控制效果(含有误差积分反馈)Fig.6 Control results with fourth order state observer(with error integral feedback)
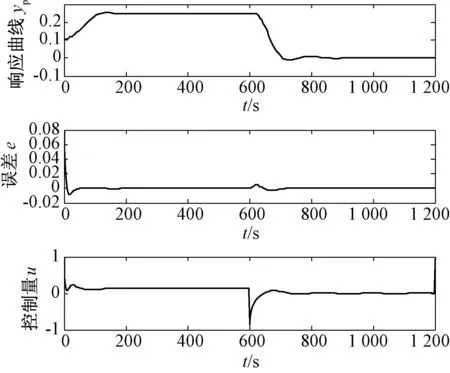
图7 状态观测器3阶时的控制效果(不含误差积分反馈)Fig.7 Control results with third order state observer (without error integral feedback)
4.2.3被控对象4阶-观测器5阶
观测器模型比被控对象高一阶即为5阶系统时,仿真结果无误差积分反馈时如图9所示,有误差积分反馈时如图10所示。相比之下,在未加入误差积分反馈下,采用5阶观测器的输出与被控对象输出误差很小,控制器输出初始时刻波动大但后期一直较平稳,系统同样存在静差;引入误差积分反馈以后,被控对象与观测器输出间的误差及控制器输出在起始阶段有一定的震荡,但一段时间以后得以平稳,最终静差为零。
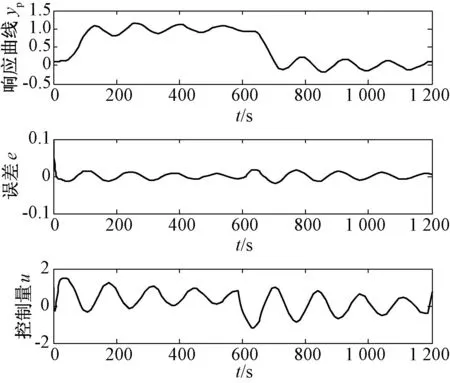
图8 状态观测器3阶时的控制效果(含有误差积分反馈)Fig.8 Control results with third order state observer (with error integral feedback)
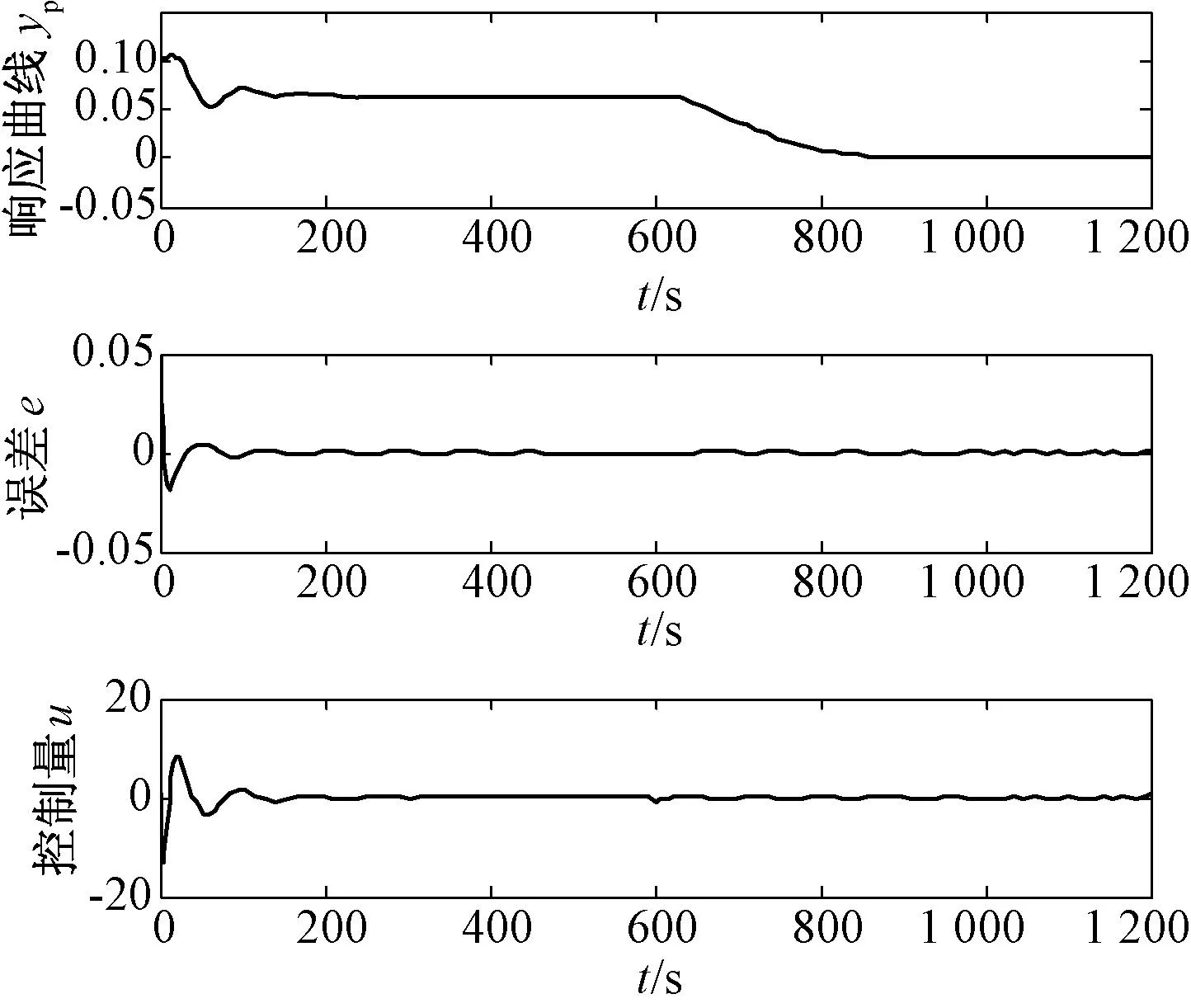
图9 状态观测器5阶时的控制效果(不带误差积分反馈)Fig.9 Control results with fifth order state observer (without error integral feedback)
4.2.4对不同阶次观测器的控制效果分析
从上述仿真结果可以得出结论:(1)当观测器阶次等于被控对象的阶次时,控制效果是最好的;(2)观测器阶次大于被控对象的阶次时,控制效果次之;(3)观测器阶次小于被控对象的阶次时,控制效果是最差的。这一点可以理解为情形(1)相当于控制器的综合是基于获得完全的系统信息,情形(2)相当于控制器的综合是基于获得冗余的系统信息,情形(3)相当于控制器的综合时获得的系统信息不完整。另外,我们还做了其它情形的仿真,结果是观测器阶次为2时效果更差,而观测器阶次为6时效果不如观测器阶次为5时,这说明,观测器的阶次不能与系统的阶次差别太大。
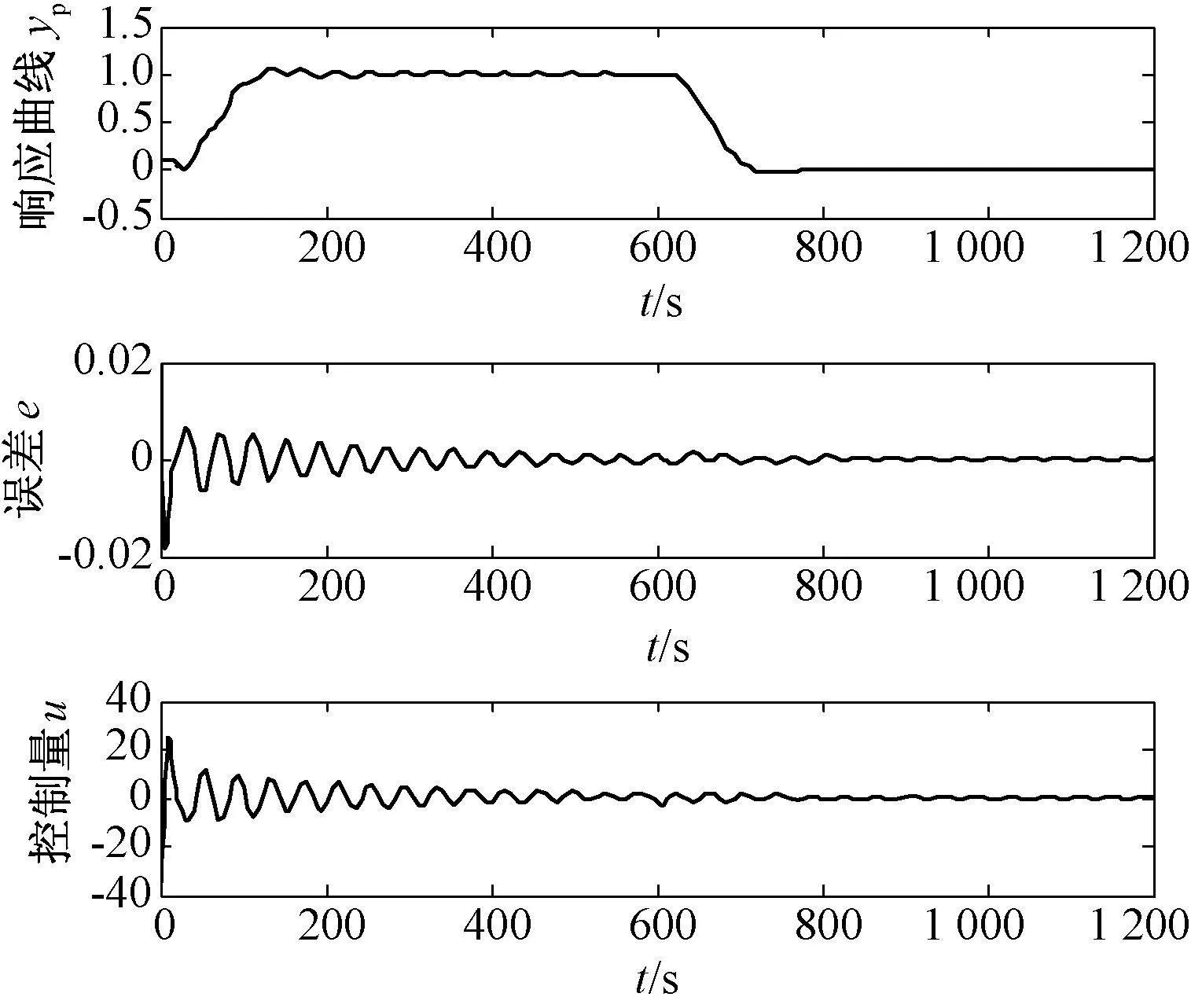
图10 状态观测器5阶时的控制效果(带误差积分反馈)Fig.10 Control results with fifth order state observer (with error integral feedback)
5结论
本文选取过热汽温系统为被控对象,其数学模型采用高阶等容惯性环节串联的形式。分别设计3阶、4阶和5阶观测器对其惰性区进行状态重构,当构造的观测器模型的阶次高于原系统阶次时的控制效果要优于低阶观测器,且在常规状态反馈基础上引入误差的积分反馈作用,使得系统静差为零。 因此对过热汽温系统采取基于误差积分反馈的观测器-状态反馈控制方案时,若所构造的观测器模型的阶次高于或者等于原被控系统阶次时的观测效果较好,基于该观测器的状态反馈对系统的动态性能调节能力更强;且该方案控制原理简单,计算量小,容易实现。
参考文献:
[1] 李建强, 杨铎烔. 基于灰色预估PID控制的过热汽温控制 [J]. 华北电力大学学报, 2011, 38(1): 71-74.
[2] 刘长良,马增辉,开平安.电站过热汽温系统的内模PID控制及其仿真[J].系统仿真学报, 2014, 26(11): 2722-2726.
[3] 马良玉,冯谦,易祖耀. 超临界锅炉过热汽温神经网络内模控制[J].自动化与仪表, 2013, 28(4):10-13.
[4] 王万召, 王杰. 过热汽温自适应逆控制方案研究[J]. 电力自动化设备, 2013, 33(9):54-57.
[5] 刘翠花,陈红,王广军.基于分散推理结构的过热汽温模糊控制及仿真 [J].系统仿真学报, 2011,23(7):1437-1440.
[6] 华志刚,吕剑虹,张铁军.状态变量-预测控制技术在600MW机组再热汽温控制中的研究与应用 [J]. 中国电机工程学报,2005,25 (12):103-107.
[7] Lin X J, Chan C W.Neuro-fuzzy generalized predictive control of boiler steam temperature [J]. IEEE Trans. Energy Conversion, 2007, 21(4):83-88.
[8] 田沛,宿喜峰,马平,等.基于自抗扰技术的主汽温全程控制[J].中国电机工程学报, 2006,26(15):73-77.
[9] 章臣樾.锅炉动态特性及其数学模型[M].北京:水利电力出版社, 1987.
[10] 刘建江,倪维斗,张法文,等.基于H∞理论的状态变量控制在再热汽温控制中的应用[J].动力工程学报,2000,20(5): 867 -871.
[11] 韩忠旭,张智.状态观测器及状态反馈控制在亚临界锅炉蒸汽温度控制系统中的应用[J].中国电机工程学报,1999,19(11):76-80.
[12] 韩忠旭,孙颖.高阶惯性环节状态反馈极点配置的一种简易方法 [J].中国电机工程学报,2002,22(4):118-121.
Extended Observer-based Superheated Steam Temperature Control
ZHANG Qingyue, WANG Dongfeng
(School of Control and Computer Engineering, North China Electric Power University, Baoding 071003, China)
Abstract:In view of the fact that the superheated steam temperature control system in thermal power plant has characteristics of large inertia and large time-delay and the conventional state feedback control can’t eliminate the steady state error, state feedback control strategy with integral error feedback was proposed. Taking into account the cognitive uncertainty about the order of the object, state observers with different orders were designed to reconstruct the state of the system, which was used for state feedback control. The simulation studies show that: better control quality can be obtained when observer with error integral feedback-state feedback control strategy is applied to superheated steam temperature control system. And when the order of the observer is greater than the controlled object’s, the control effect is better than that when observer order is less than the controlled object’s; what’s more, when the observer order is equal to the controlled object’s, the control effect is the best.
Key words:state observer; error integral feedback; observer order; superheated steam temperature
作者简介:张青月(1989-),女,硕士研究生,研究方向为火电厂热工控制系统分析与设计。
中图分类号:TK39
文献标识码:A
文章编号:1007-2691(2016)01-0086-06
基金项目:中央高校基本科研业务费专项资金资助项目(2014MS139).
收稿日期:2015-06-05.
doi:10.3969/j.ISSN.1007-2691.2016.01.15