
舰载机动基座快速对准方法研究
2016-03-16 06:18白晓萌杨功流王丽芬
导航定位与授时 2016年1期
白晓萌,杨功流,王丽芬,李 晶,殷 珂
(北京航空航天大学 仪器科学与光电工程学院,北京100191)
舰载机动基座快速对准方法研究
白晓萌,杨功流,王丽芬,李 晶,殷 珂
(北京航空航天大学 仪器科学与光电工程学院,北京100191)
由于舰载机弹射过程中机体的运动加速度较大,有利于提高系统的可观测性,弹射起飞是实现舰载机快速对准的重要手段。实现舰载机在弹射过程中的快速对准,其关键在于抑制振动干扰对初始对准精度的影响。通过建立舰载机动基座对准非线性误差模型,分析在弹射对准的过程中由于前起落架振动造成的对准发散问题,并在此基础上,利用强跟踪滤波算法抑制弹射过程中对准的振动干扰。仿真结果表明,强跟踪滤波方法相对卡尔曼滤波而言,可以有效提高舰载机惯导快速对准精度。
舰载机;快速对准;前起落架振动;强跟踪滤波
0 引言
舰载机的初始对准精度不仅关系到舰载机的导航精度,甚至关系到机载武器的打击精度。而对准时间则关系到舰载机起飞的快速性。舰载机的对准精度和对准时间是相互矛盾的,在较快的时间内利用一切信息完成舰载机的初始对准决定了航母的生存能力。舰载机起飞过程中会承受巨大的加速度,而加速运动的存在恰好可以增加滤波器的可观测性,缩短对准时间,提高对准精度,因此舰载机惯导的初始对准有可能在舰载机起飞过程中实现。舰载机在弹射过程中的对准会受各种因素的干扰,尤其是前起落架振动引起的对准误差。所以要提高对准精度,需要充分了解弹射对准过程所受到的干扰,并采取相应的补偿方法。
目前国内外对舰载机弹射中传递对准的研究比较少见,国外可以查阅的文献仅从理论上分析描述舰载机弹射的对准方法、基准信息来源及易受干扰等[2-5],未见详细的研究文献,更无实际验证试验的描述。而就我国的国情而言,快速对准的研究起步较晚,对准技术还不完善,特别是利用GPS进行空中对准时易受到敌方的干扰而导致对准失败。
本文提出了一种在弹射过程中前起落架振动干扰下的快速对准方法。首先构造了动基座快速对准误差模型,然后分析了舰载机前起落架振动对惯导快速对准的影响,并研究相应的误差补偿方法,之后提出了强跟踪滤波方法来提高对准时间和精度,最后通过仿真分析加以验证。
1 舰载机动基座快速对准误差模型
(1)
于是舰载机动基座快速对准非线性误差模型[6]如下:
(2)

(3)
(4)
定义对准滤波器的状态量为
(5)

系统状态方程为

(6)
量测方程中取机载子惯导与速度和矢量之差,即速度观测量ZV的构成简写如下
(7)


(8)

(9)
式中,速度观测的等效观测噪声为
(10)
即量测方程为
Z=HX+V
(11)
式中,H=[03×3I3×3]。
2 前起落架振动影响分析
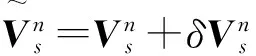
前起落架的振动会引起承力杆和前起落架支柱的接头松动,从而给前起落架带来严重的疲劳问题[1],同时就会对弹射中对准的性能产生一定的影响。影响主要通过加速度计振动而影响滤波效果[7]。前起落架振荡及衰减的过程为:在舰载机张紧阶段,随着牵制载荷的增加,前起落架压缩量、活塞杆向后的弯曲变形都在不断增加,0.5s时牵制载荷卸载,前起落架开始快速前后振荡。随着弹射过程的进行,在1s左右,这种振荡基本衰减完毕,起落架的压缩量也进入到正常的小幅振荡状态。
从上述过程可以看出,前起落架的振荡时间约为0.5s,但振荡幅度由于牵制杆设计长度、舰载机重量等诸多因素的影响而不能获得准确数据。因此,假设沿舰载机轴向加速度计和天向加速度计在弹射开始时感受到振动干扰,在0.5s后基本衰减为0,振动引起的加速度大小峰值分别设置为5m/s2、10m/s2及20m/s2,振动频率为100Hz,以5m/s2的振动峰值为例,加速度振动及衰减图形如图1所示。
图1 前起落架振动情况Fig.1 The vibration of nose gear
假设舰载机弹射时间为3s,舰载机水平加速度为2g;初始时刻舰艇的位置为东经116°,北纬40°,初始航向为30°,舰艇匀速直航,航行速度为10节;舰艇惯导系统中陀螺常值漂移为0.001(°)/h,加速度计零偏为50μg;机载惯导系统中陀螺常值漂移为0.01(°)/h,加速度计零偏为100μg,激光多普勒测速仪的测量精度为0.01m/s;暂不考虑大失准角影响,设机载惯导与舰载惯导之间的安装误差角为φx=10′,φy=15′,φz=-30′;舰载惯导、机载惯导及激光多普勒测速仪的数据更新率均为0.01s,滤波周期为0.01s,仿真时间为3s。
在振动加速度分别为5m/s2、10m/s2及20m/s2时,机载惯导姿态角估计误差曲线和在振动加速度为20m/s2时利用Kalman滤波得到的姿态失准角估计曲线如图2和图3所示。

图2 前起落架振动对快速对准性能影响Fig.2 The impact on rapid alignment from nose gear vibration
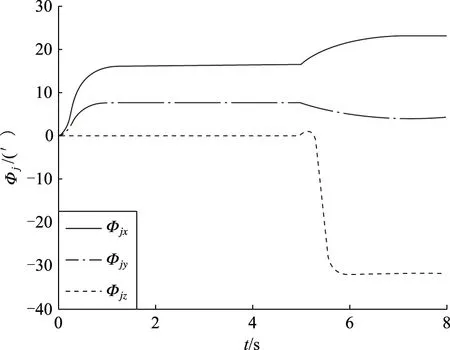
图3 卡尔曼滤波对姿态失准角估计曲线Fig.3 The estimate of attitude misalignment angle based on Kalman filter
从上述结果可以看出,振动幅值对快速对准性能的影响随着振动幅值的增大而增强,且俯仰角误差受振动幅值的影响更明显。但是从振动加速度峰值为20m/s2时姿态失准角估计曲线可以看出,振动对水平姿态失准角的估计精度均有影响,只是由于起落架前后振动,在对机载惯导姿态补偿失准角后,从姿态误差来看,表现为俯仰角精度受振动影响比较明显而已。
3 强跟踪滤波方法
在系统方程中出现扰动或观测异常时,一般自适应Kalman滤波算法不具备对系统突变状态的跟踪能力。为了保证滤波器可靠收敛,考虑通过牺牲一定的精度换取滤波器稳定性。如增大系统的过程噪声和观测噪声的方差阵,这样就将许多未建模误差包含进去,使算法变得简单可靠。强跟踪Kalman滤波器[5]是一种带时变渐消因子的滤波算法,实时调整预报误差的协方差阵以及相应的增益阵
(12)
其中λ(k)≥1为时变的渐消因子。将式(12)代替卡尔曼滤波中相应的公式就构成了一种带次优渐消因子[8]的卡尔曼滤波器。
次优渐消因子可以由式(13)近似得到:
(13)

N(k+1)=V0(k+1)-H(k+1)Γ(k+1,k)
Q(k)ΓT(k+1,k)HT(k+1)-
βR(k+1)
(14)
M(k+1)=H(k+1)Φ(k+1,k)
P(k|k)ΦT(k+1,k)HT(k+1)
(15)
其中,Vo(k+1)由式(16)估算出:
(16)
式中,0≤ρ≤1为遗忘因子,一般取ρ=0.95。tr(A)表示对矩阵A求迹运算。
强跟踪卡尔曼滤波具有以下优点:1)较强的关于实际系统参数变动的鲁棒性;2)较低的关于系统噪声、量测噪声以及初值统计特性的敏感性;3)较强的关于突变状态的跟踪能力,并在滤波器达到稳定状态时,仍保持对缓变状态和突变状态的跟踪能力;4)适中的计算复杂性。
强跟踪滤波器具体算法如下:
(17)
(18)
=diag[λ1(k),λ2(k),…,λn(k)]
(19)
(20)
(21)
Pk=(I-KkHk)Pk/k-1
(22)
式中,L(k)为时变的渐消矩阵;λi(k)≥1(i=1,2,…,n)为n个时变的渐消因子。基于新息序列的正交原理,确定上述时变渐消因子可以归结为一个无约束的多元非线性规划问题。下面是λi(k)的一种近似计算方法:
(23)
(24)
(25)
(26)
(27)

4 仿真分析
仿真条件同第2节,利用强跟踪滤波方法对机载惯导姿态失准角进行估计,则不同振动加速度情况下,快速对准性能曲线如图4所示。相同条件下,卡尔曼滤波估计结果与强跟踪滤波估计结果对比见表1。从仿真结果可以看出,强跟踪滤波方法相对卡尔曼滤波而言,可以有效提高舰机惯导快速对准精度。
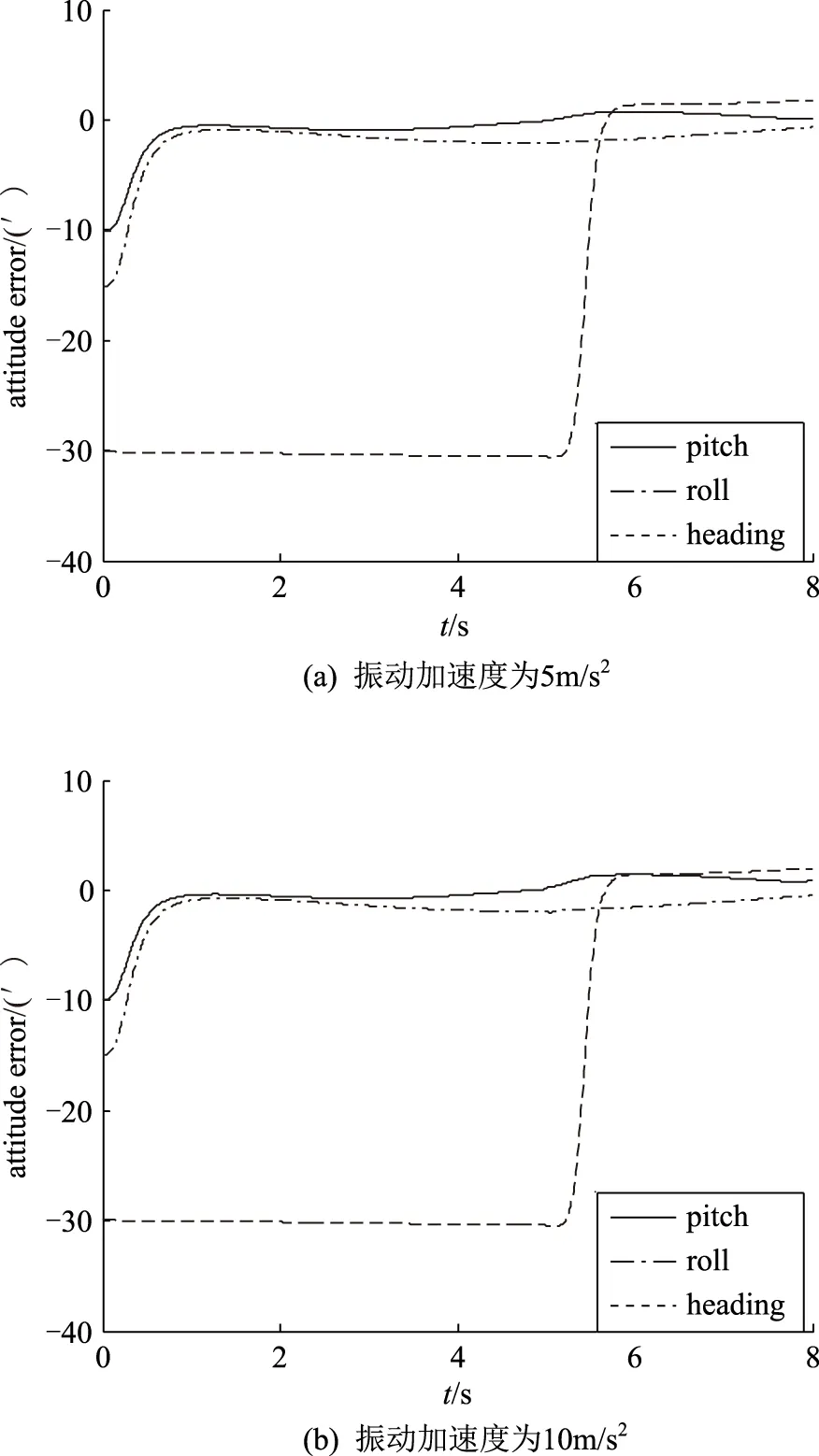

图4 不同振动加速度强跟踪滤波快速对准性能曲线Fig.4 The result of rapid alignment based on strong tracking filtering at different vibration acceleration
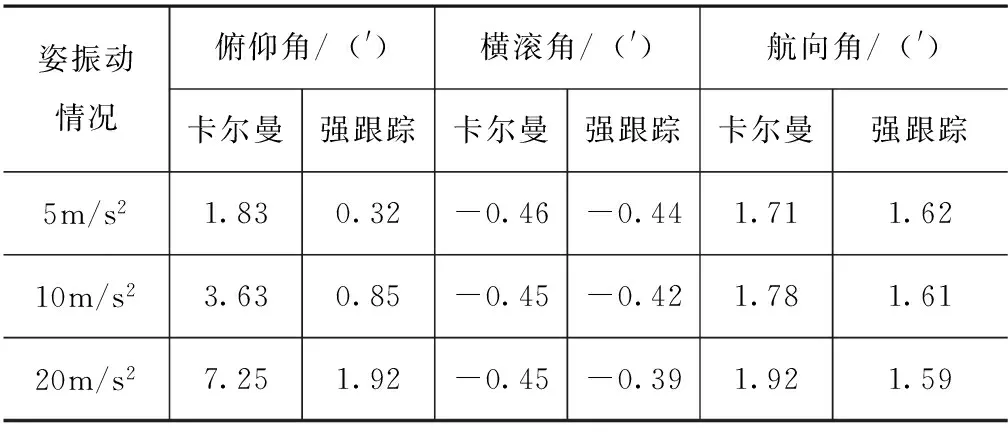
姿振动情况俯仰角/(')横滚角/(')航向角/(')卡尔曼强跟踪卡尔曼强跟踪卡尔曼强跟踪5m/s21.830.32-0.46-0.441.711.6210m/s23.630.85-0.45-0.421.781.6120m/s27.251.92-0.45-0.391.921.59
5 结论
前起落架振动对快速对准性能的影响是区别于其他干扰因素的一个重要误差因素,前起落架振动会导致机载惯导姿态失准角的发散,从而降低对准精度。通过本文提出的强跟踪滤波算法,可以有效减少前起落架振动对快速对准的影响。由于起落架前后振动,对俯仰角影响较大,对横滚角和航向角影响甚微,所以仿真条件中假设沿舰载机轴向加速度计和天向加速度计感受到振动干扰。仿真结果表明,强跟踪滤波方法相对于卡尔曼滤波而言,对准精度在横滚角和航向角上略有提高,在俯仰角上提高显著,约达5倍,与理论假设相符,满足实际需求。
[1] 聂宏,房兴波,魏小辉,等.舰载机弹射起飞动力学研究进展[J].南京航空航天大学学报,2013,45(6):727-738.
[2] 于浩,聂宏,魏小辉.舰载机弹射起飞前起落架牵制载荷突卸动力学分析[J].航空学报,201,32(8):1435-1444.
[3] 朱齐丹,李新飞,喻勇涛.考虑载荷突卸的舰载机弹射起飞动力学分析[J].哈尔滨工程大学学报,2012,33(9):1150-1157.
[4] 周东华,叶银忠.现代故障诊断与容错控制[M].北京:清华大学出版社,2000.
[5] 付梦印,邓志红,张继伟.Kalman 滤波理论及其在导航系统中的应用[M].科学出版社,2003.
[6] You-Chol Lim,Joon Lyou.Transfer alignment error compensator design usingH∞filter[A].Proceedings of American Control Conference[C],2002,vol(2):1460-1466.
[7] 郑本武.舰载飞机弹射起飞性能和影响因素分析[J].飞行力学,1992,10(3):27-33.
[8] 宋丽君,秦永元,严恭敏.H∞次优滤波在速度姿态匹配传递对准中的应用[J].传感技术学报,2012,25(1):49-53.
Research on Rapid Alignment Method of Carrier-based Aircraft on Mobile Base
BAI Xiao-meng,YANG Gong-liu,WANG Li-fen,LI Jing,YIN Ke
(School of Instrumentation Science and Opto-electronics Engineering,Beihang University,Beijing 100191,China)
Catapult launch is the important means to rapid alignment of carrier-based aircraft for the movement acceleration of the body is so large in the process of catapult that it is helpful to improve the observability of the system.To realize the rapid alignment in the process of catapult,the key is to suppress vibration interference effects on the precision of initial alignment.In this paper,we established the error model based on the nonlinear on rapid alignment of carrier-based aircraft on mobile base,and then analyzed the divergence problem caused by the nose gear vibration in the process of catapult alignment,and on this basis,we use strong tracking filtering algorithm to suppress vibration interference in the process of alignment.The simulation results show that the strong tracking filtering method can improve the precision of rapid alignment on carrier-based aircraft inertial navigation effectively than Kalman filter.
Carrier-based aircraft;Rapid alignment;Nose gear vibration;Strong tracking filtering
2015-11-02;
2015-11-28。
白晓萌(1992-),女,硕士研究生,主要从事惯性技术的研究。E-mail:bxmnuaa@163.com
U666.1
A
2095-8110(2016)01-0013-06
猜你喜欢
电子工业专用设备(2022年1期)2022-07-13
舰船科学技术(2022年10期)2022-06-17
中原商报·科教研究(2021年6期)2021-05-13
数字海洋与水下攻防(2020年5期)2021-01-04
百科探秘·航空航天(2020年8期)2020-07-29
民用飞机设计与研究(2020年1期)2020-05-21
军民两用技术与产品(2019年12期)2020-01-19
宇航学报(2019年8期)2019-09-06
专用汽车(2018年10期)2018-11-02
当代陕西(2018年12期)2018-08-04
