
抑制超声波电机温度变化的应用设计
2016-03-16 06:08李艳娟朱艳芳胡琪波
导航定位与授时 2016年1期
李艳娟,朱艳芳,胡琪波
(湖北三江航天红峰控制有限公司,湖北 孝感432000)
抑制超声波电机温度变化的应用设计
李艳娟,朱艳芳,胡琪波
(湖北三江航天红峰控制有限公司,湖北 孝感432000)
介绍了超声波电机的优点及工作原理,并对超声波电机在实际应用过程中温度变化、发热严重的问题进行了分析,提出了一种有效的通过控制电机转速的方法来抑制超声波电机温度变化的解决方法。
超声波电机;温度变化;解决方法
0 引言
超声波电机(Ultrasonic motor,USM)是国内外日益受到重视的一种新型直接驱动电机,其运行机理是建立在压电逆效应原理基础之上,以其不同于传统电磁电机的独特优势近年来得到迅猛发展。超声波电机具有低速大转矩、运行无噪音、功率密度大、无电磁干扰、可断电自锁等优点。但是,超声电机在运行过程中存在热损耗、温度变化和摩擦损耗等现象是无法避免的缺点。虽然超声波电机存在发热严重的现象,但自超声波电机问世以来仍然发展迅速,主要是因为超声电机的优点使得它非常适合于非连续运动的伺服控制及直接驱动。目前它已被成功应用于航空航天、微机电系统、精密定位装置、汽车、照相机等领域[1]。
本文介绍了超声波电机在惯组标定设备中的应用,并提出了一种新型抑制超声波电机温漂升高的解决方法,应用过程中取得了较好的效果。
1 惯组标定设备工作原理
惯组标定设备主要用于完成惯组的角度标定测量,由控制电路、电机驱动电路、超声波电机、旋转变压器及相关电缆组成。惯组标定设备工作原理如图1所示,其工作原理是:上位机通过RS422通信接口给定目标位置信号,与旋转变压器反馈信号、温度反馈信号经过控制电路形成闭环,得到综控信号∑来驱动控制超声波电机的启停和速度,从而使惯组达到目标位置。

图1 惯组标定设备工作原理框图Fig.1 The block diagram of calibration equipment of inertial navigation set
2 硬件设计
2.1 控制电路设计
控制电路主要由MCU单片机、频率控制电压输出电路、温度采样电路、旋转变压器解码反馈电路、供电电源等部分组成。单片机(型号为PIC18F4431-1/PT)主要完成接收上位机目标信号,接收电机温度变化信号,接收旋转变压器反馈信号,通过软件运算输出驱动电路所需的电压信号以及电机的方向信号和启停信号。
频率控制电压输出电路、温度采样电路如图2所示。为提高系统的标定精度和超声波电机运行速度平稳,本文采用了高精度的14bitDA芯片和温度采样电路进行设计。
旋转变压器解码反馈电路通过AD2S12A0解码芯片完成[2],本文不做详细介绍。
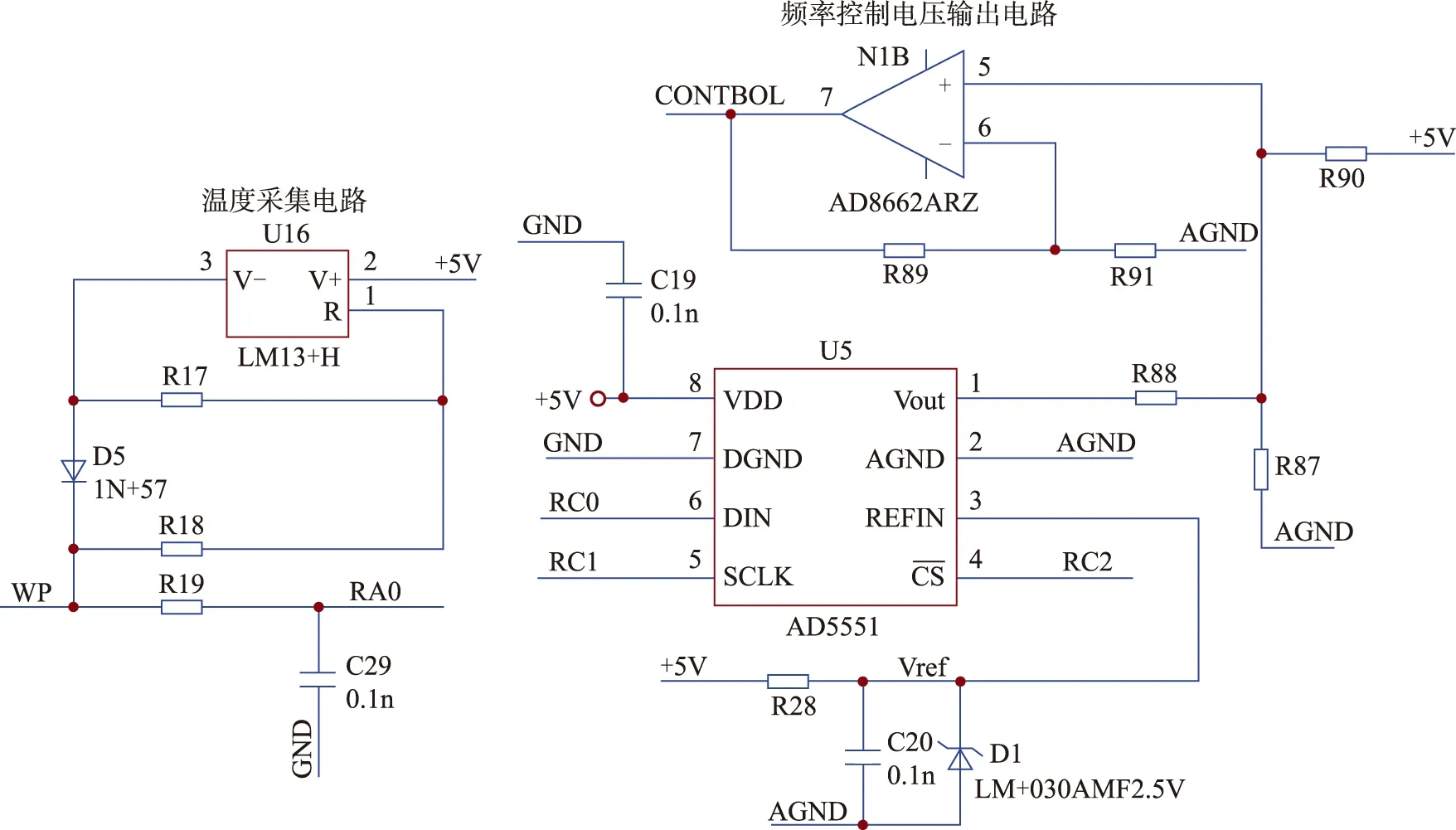
图2 控制电路设计原理图Fig.2 The scheme of control circuit
2.2 驱动电路设计
本文采用目前较成熟的超声波电机调频工作方式进行调节超声波电机的运行速度,原理如图3所示,主要由可调压控振荡发生器、四分频分相器和功放匹配电路三部分组成。
可调压控振荡发生器可产生频率随CONTROL电压信号变化的基准方波频率信号;四分频分相器可将基准方波频率信号生成四路时间上互差90°的方波信号、频率为基准方波频率的1/4;功放匹配电路将该信号放大,生成两相相差90°的正弦功率信号。其设计电路图如图4所示[3]。
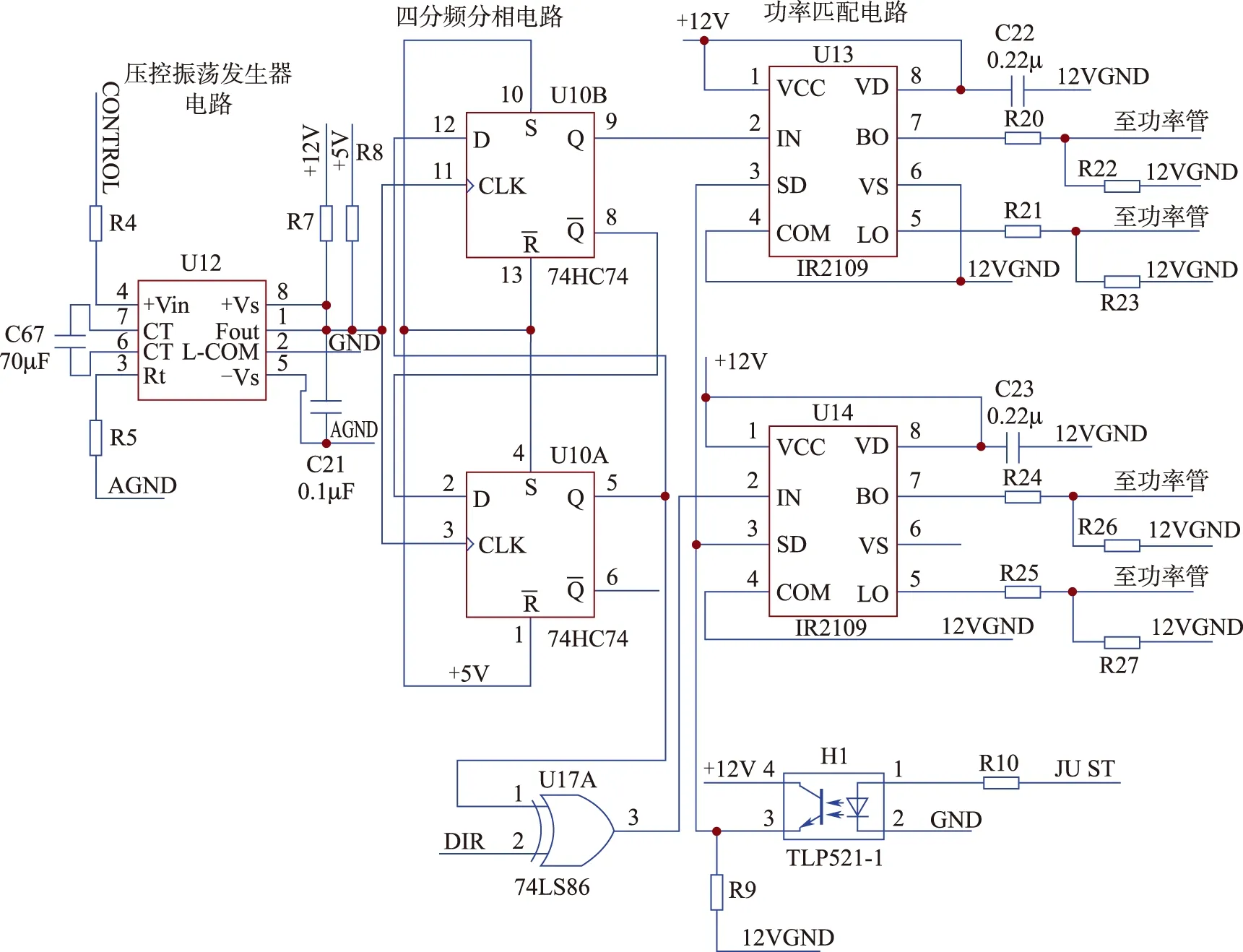
图4 超声电机驱动电路图Fig.4 The drive circuit of ultrasonic motor
位置闭环可通过单片机根据上位机给定的目标位置与旋转变压器当前位置,产生DIR方向信号和JU_ST启停信号。
速度闭环可通过单片机输出调节压控振荡器的输入电压来控制输出频率,使该频率在35~38kHz之间(本文选用的超声波电机型号为USM80系列),通过单片机输出固定三个D/A值,使之分别对应电机转速为5rad/min、15rad/min、20rad/min。
温度闭环主要起到电机保护作用。当温度过高或过低后,超声波电机内部通过热敏电阻感应到温度变化,当温度达到上限和下限极限值时,单片机发出JU_ST启停信号或改变D/A值降低超声电机的速度,从而达到保护电机的目的。
依据电机厂家标定的最高温度、最低温度对应的热敏电阻值和温度与热敏电阻的线性关系y=ax+b(其中:y代表热敏电阻阻值、x代表温度),可推算出任意温度下对应的热敏电阻值。通过采集该热敏电阻上的电压计算出目标设定的温度上限和下限,从而在软件中实现对电机的温度保护。
3 软件设计
软件设计主要包括两部分:CPLD时序软件设计和控制算法软件设计[4]。
3.1 CPLD时序控制软件
AD2S1210对地址和数据写入的时序要求较高,要从AD2S1210中读取位置或者速度信息时,首先要由SAMPLE的一个下降沿把数据从位置和速度积分器中送到寄存器中,并且保持100ns保证数据的正确锁存,在SAMPLE由高到低后150ns才能通过置低RD读取相应寄存器的数据。通过大量试验验证,该时序能有效完成数据的转换。CPLD时序控制流程图如图5所示。
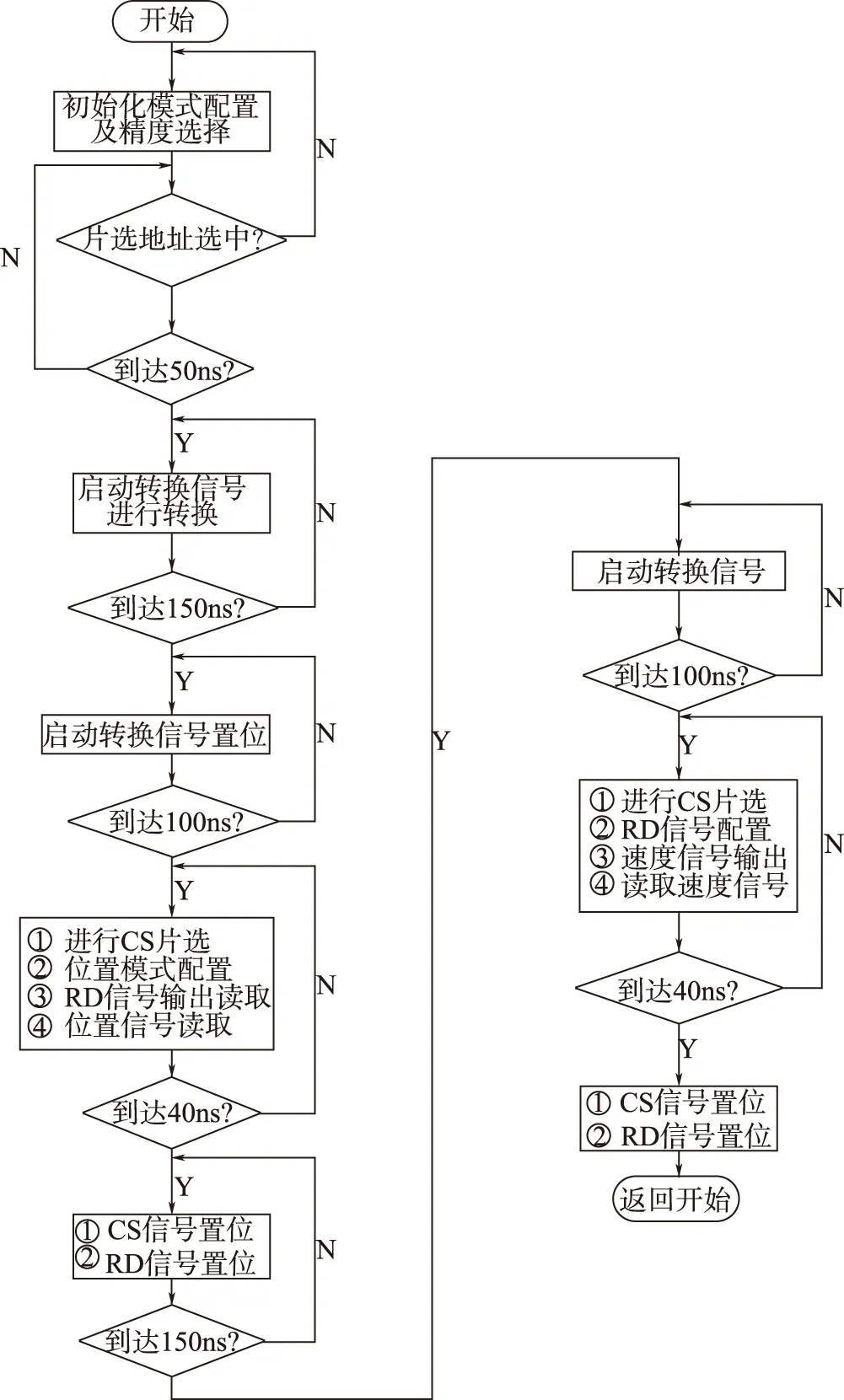
图5 时序控制流程图Fig.5 The flow chart of time order control
3.2 控制算法软件
主程序及控制算法模块是整个控制程序的核心,包括旋转变压器的信号采集计算、温度信号采集计算、上位机信号接收、控制频率的D/A产生、方向信号、启停信号。控制算法软件按功能分成三大部分:位置环闭环、速度环闭环和温度环闭环设计。控制算法流程图如图6所示。

图6 控制算法流程图Fig.6 The flow chart of control algorithm
4 实验验证
电机在空载运行时驱动电压波形如图7所示。频率和电压均可在电机运转中调节,本方案简化了电机的调节过程、提高了电机速度的可控性。
分别用±6V的正弦信号、+1V阶跃信号对超声电机伺服机构进行了初步测试,其测试图形如图8、图9所示。
以上测试图形中,黑色线表示外部参考信号,红色线表示实际位置反馈信号。从三种信号的测试图形来看,超声电机伺服机构具有较好的跟随能力、定位精度以及稳定性。
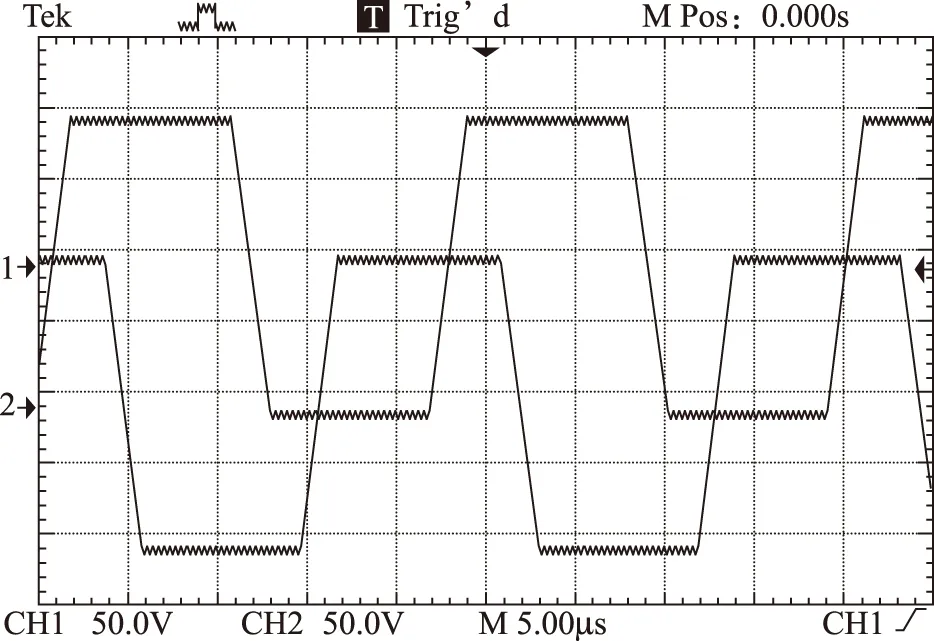
图7 驱动电压波形Fig.7 The test wave of drive voltages

图8 ±6V正弦波测试波形Fig.8 The test wave of ±6V sine wave signals

图9 +1V阶跃测试波形Fig.9 The test wave of +1V step signal
5 结束语
通过以上分析和论述,完成了超声电机系统伺服机构设计方案,并对该方案进行了实验验证,该伺服系统具有精度高、稳定性好、抗电磁干扰能力强等优势。同时,该方案设计的舵伺服系统具有体积小、重量轻、输出力矩大、断电自锁力矩大等特点。因此,超声波电机伺服机构将成为未来伺服系统发展的一个重要方向。
[1] 胡敏强,金龙,顾菊平.超声波电机原理与设计[M].北京:科学出版社,2005:13-20.
[2] 黄建国,陈 晓.基于双通道旋转变压器的智能编码器设计[J].现代雷达,2009:46-80.
[3] 胡敏强,金龙,顾菊平.超声波电机原理与设计[M].北京:科学出版社,2005:120-139.
[4] 金龙,禇国伟,等.基于DSP的超声波电机控制系统[J].电工技术学报,2004,19(8):93-98.
An Application Research on Restraint in Temperature Change for Ultrasonic Motor
LI Yan-juan,ZHU Yan-fang,HU Qi-bo
(Hubei Sanjiang Space Hongfeng Control Co.,Ltd.,Xiaogan 432000,China)
The advantages and the working principles of ultrasonic motor and analysis on the problems of severe temperature changing of ultrasonic motor in the practical application are introduced.An effective approach to restrain the temperature drift of ultrasonic motor by controlling the speed of the motor has been provided.
Ultrasonic motor;Temperature change;Approach
2015-04-26;
2015-07-31。
李艳娟(1983-),女,硕士,工程师,主要从事电路系统设计。E-mail:liyanjuan19021511@163.com
TP311.1
A
2095-8110(2016)01-0047-06
猜你喜欢
大学物理实验(2022年3期)2022-10-20
选煤技术(2022年2期)2022-06-06
军民两用技术与产品(2022年3期)2022-06-05
物流科技(2022年2期)2022-05-07
湖北工业大学学报(2021年2期)2021-04-28
中华养生保健(2020年3期)2020-11-16
物理与工程(2020年1期)2020-06-07
青年生活(2019年27期)2019-10-21
北京航空航天大学学报(2017年1期)2017-11-24
教育教学论坛(2017年2期)2017-02-10
