
基于云模型的多状态系统可靠性评估
2016-03-15 08:36宋太亮
装甲兵工程学院学报 2016年5期
高 龙, 宋太亮, 闫 旭
(1. 装甲兵工程学院技术保障工程系, 北京 100072; 2. 中国国防科技信息中心, 北京 100142)
基于云模型的多状态系统可靠性评估
高 龙1, 宋太亮2, 闫 旭1
(1. 装甲兵工程学院技术保障工程系, 北京 100072; 2. 中国国防科技信息中心, 北京 100142)
针对多状态系统可靠性评估中存在的不确定性问题,研究了采用云模型表示状态概率的随机不确定性和认知不确定性的多状态系统可靠性评估方法。基于状态概率云模型进一步扩展了通用生成函数(Universal Generating Function ,UGF),形成了云通用生成函数(Cloud Universal Generating Function ,CUGF),并定义了其2种基本运算,给出了在给定需求下多状态系统可用度的求解步骤以及云模型表示系统可用度的3个云数字特征。最后,通过3单元串-并联多状态系统算例及其与基于概率理论的评估结果的比较,验证了方法的准确性和可行性。研究成果为多状态系统可靠性评估中信息或数据的不完整性、不精确性及模糊性等的处理提供了新的思路和方法。
多状态系统;可靠性评估;云模型;不确定性
多状态系统可靠性研究是近几年国内外研究的主流方向之一。Murchland[1]提出并完善了多状态系统可靠性的基本概念。目前,多状态系统可靠性的相关概念和理论已广泛用于机械[2]、电力[3-4]和网络[5-7]等领域。多状态系统可靠性评估主要基于结构函数法[8]、随机过程法[9]、Monte Carlo仿真[10]以及通用生成函数法(Universal Generating Function,UGF)[5]4种方法,应用这些方法的基本前提条件为:1)构成多状态系统的单元或子系统的每个状态可利用统计概率完全表征;2)可精确获得多状态系统的单元或子系统的所有性能水平。但由于数据与信息的不精确和不充分等不确定因素,实践中很难对状态概率和性能水平进行处理,进而影响了评估结果的准确性和可信性。因此,在多状态系统可靠性评估中需要对单元或子系统的状态概率和性能水平的各种不确定性进行建模。不确定性可分为随机不确定性和认知不确定性[11],其中随机不确定性主要来自部件行为的可变性和随机性;认知不确定性主要来自知识或数据的不完整性和不精确性[12]。Destercke等[13]应用信任函数表示认知不确定性并扩展了UGF来评估多状态系统的可靠性。虽然信任函数中的概率指派函数可有效刻画信息的不完整性,但该方法并不适用于信息具有模糊性的多状态系统可靠性评估。Li等[14]基于模糊集合理论,应用随机模糊变量综合考虑随机不确定性和认知不确定性,对多状态系统可靠性进行了评估。该方法虽然解决了2种不确定性共存的问题,但却丢失了单元或子系统的部分细节信息,且计算过程较为复杂。
根据单元或子系统的物理特性、历史数据以及专家经验等信息,可对多状态系统的有关特性进行估计并给出相应的偏好值,则所有信息来源给出的偏好值集合就构成了该特性的一个云,可应用云理论对整个多态系统的行为进行进一步研究。虽然单个偏好值是确定的,但是由偏好值集合构成的云却蕴含了单元特性的随机不确定性和认知不确定性。笔者基于云理论的基本思想,针对多状态系统可靠性评估中不确定性问题,应用云模型来表示状态概率的不确定性,建立云通用生成函数(Cloud Universal Generating Function ,CUGF)并定义相应的运算,给出在给定需求下多状态系统的稳态可用度评估步骤以及可用度云的3个数字特征值,并通过算例进行验证。
1 基本理论与假设
1.1 多状态系统理论


1.2 云理论
1.2.1 云的定义
设U={x}为以精确数值表示的论域,A为与之对应的定性概念,x∈U存在一个有稳定倾向的随机数y=μA(x),并称之为x对A的隶属度,隶属度y在论域U上的分布称为隶属云(简称“云”)[15],(x,y)称为云滴。云是定性概念与定量数值之间的转换模型,成千上万的云滴组成云,云滴是对定性概念的定量描述,云滴的产生过程表示了定性与定量之间的相互映射。
1.2.2 云的数字特征
云通过期望值Ex、熵En和超熵He三个数字特征值来定量表示。其中:Ex为论域的中心值,可表示定性概念;En为定性概念模糊程度的测度,反映了在论域中被概念所接受的数值范围,En越大,概念的数值范围就越大,模糊程度就越大;He为熵的熵,可反映云滴的离散程度,也是隶属度随机性的测度,He越大,表明云滴越厚,离散程度也越大。
1.2.3 正向正态云发生器
由数字特征产生云滴进而构成云的过程称为正向云发生器。由于正态云模型具有普适性[16],因此笔者选择正态云模型来描述信息的不确定性。设云滴数量为m,则产生m个云滴(xl,μl)(l=1,2,…,m)的正态云的具体步骤如下:

1.2.4 逆向正态云发生器
逆向正态云发生器是根据一定数量的正态分布云滴得到云的3个数字特征值的过程。逆向正态云发生器算法是基于统计原理,分为包含确定度信息和不包含确定度信息2类。笔者采用Liu等[17]提出的不包含确定度信息的算法。设有m个样本点xl(l=1,2,…,m),则得到该云的3个数字特征值的步骤如下:
1.3 基本假设
假设1:单元或系统具有有限个离散状态,且各状态都是确定的,即各状态相应的性能水平不具有随机性和模糊性。
假设2:单元或系统的状态概率具有不确定性,可用正态云模型对其特征进行描述。
假设3:对于每个状态概率,存在多个与其有关的信息来源,且每个来源的信息均能给出一个偏好值。
2 基于UGF的多状态系统评估
可靠性分析的复杂性随着单元数量n的增加呈指数增长的趋势,而通用生成函数通过利用系统模块化的优势可在一定程度上降低该指数的增长趋势。
目前,主要利用所有单元性能水平的概率分布来研究系统结构函数。当给定概率pj时,单元j的状态信息的z变换函数为

式中:变量z用于提供多项式算子,单元或系统的性能水平信息存贮于指数项中。整个系统的UGF为
U(z)=Ωφ(U1(z),…,Un(z))=


由此可以看出:UGF是一种基于z变换和通用合成运算的方法。在合成运算中,系统结构函数φ(g)为整个系统的性能水平,由不同单元的性能水平构成。在可靠性逻辑框图中,φ(g)通过单元之间的连接形式(串联或并联等)来严格定义[18]。
系统性能水平和需求w之间的关系通常利用系统状态满足指标ri的情况来确定,即ri=gi-w。当且仅当ri≥0时,状态i是一个可接受的状态。通常,多状态系统的可用度可定义为多状态系统的性能水平大于需求的概率,即

对于给定的U(z)和w,应用运算δA可获得多状态系统的稳态可用度,即
3 云模型表示不确定性的CUGF
由上述基于概率论的评估过程可以看出:定义在空间状态gj上的概率pj描述了单元状态出现的随机不确定性。然而,确定单元状态概率pj的值需要大量的数据,特别是在各种不确定性同时存在的情况下,如数据缺失或不精确、小样本以及专家意见等,概率论难以对这些不确定性进行建模。因此,笔者应用云模型来表示状态概率的不确定性。


应用云模型表示单元状态概率不确定性时,若给定单元j的概率云Cpj(Ex,En,He)时,则单元信息的z变换函数为

式中:变量z用于提供多项式算子,单元的性能水平信息存贮于指数项中,这与UGF相类似。整个系统的CUGF为
U(z)=Ωφ(U1(z),…,Un(z))=


设Cp1(Ex1,En1,He1)和Cp2(Ex2,En2,He2)为任意2个正态概率云,其运算结果为正态概率云Cp(Ex,En,He),则依据文献[19]定义运算规则如下:
1)当Cp(Ex,En,He)=Cp1(Ex1,En1,He1)+Cp2(Ex2,En2,He2)时,有
2)当Cp(Ex,En,He)=Cp1(Ex1,En1,He1)×Cp2(Ex2,En2,He2)时,有
得到多状态系统基于云模型的CUGF后,便可应用运算δA计算出多状态系统的稳态可用度,即


4 算例分析
φ(G1(t),G2(t),G3(t))=
φS(φP(G1(t),G2(t)),G3(t))=
min((G1(t)+G2(t)),G3(t)),
式中:φS为串联运算;φP为并联运算。整个系统的UGF为
U(z)=Ωφ(u1(z),u2(z),u3(z))=
ΩφS(ΩφP(u1(z),u2(z)),u3(z))。
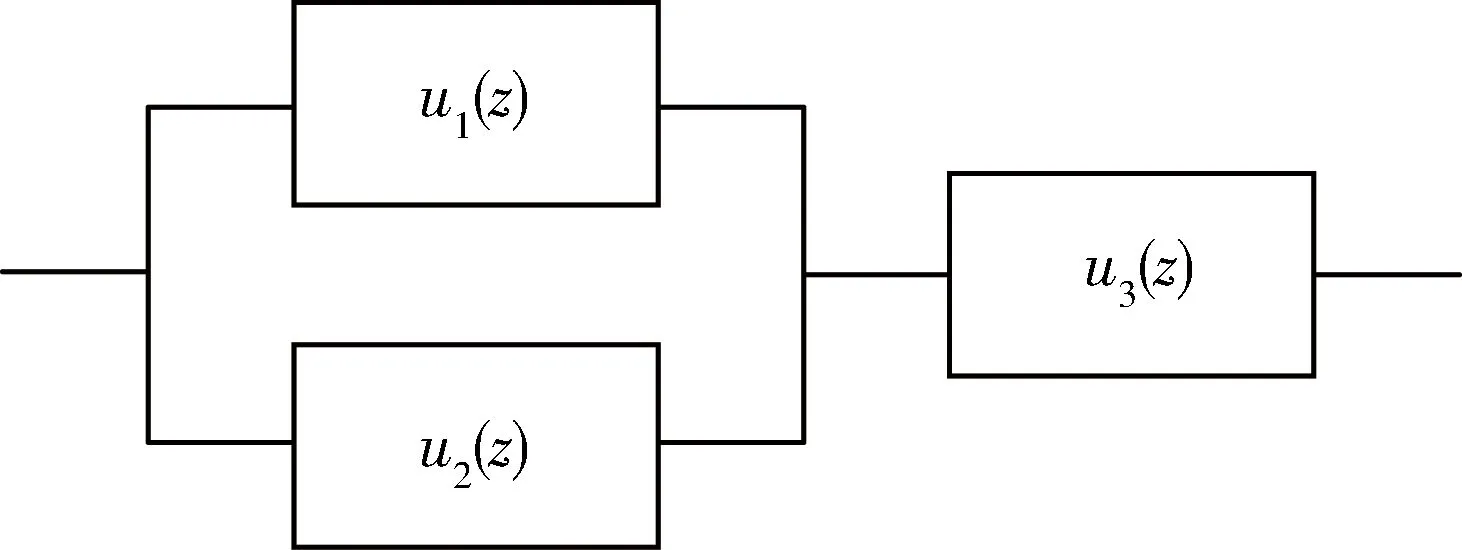
图1 流体传动系统结构
4.1 基于概率的稳态可用度
A(1.5)=δA(U(z),1.5)=δA(0.56gz3.5+0.23gz3
+…+0.009 6gz1+0.049 6gz0,1.5)=

0.067 2+0.096+0+0=0.940 8。
4.2 基于云模型的稳态可用度
设单元j的每个状态有200个信息来源,每个信息来源可给出一个状态概率偏好值,则所有偏好值构成样本集合X={x1,x2,…,x200},采用1.2.4节中不包含确定度信息的逆向正态云生成器算法,求得每个概率云的3个数字特征值Ex、En和He,如表1所示。采用1.2.3节中的正向正态云发生器算法求得3个单元概率云的云滴以及正态云图,如图2-4所示。

表1 云概率的数字特征值

图2 单元1的状态概率正态云
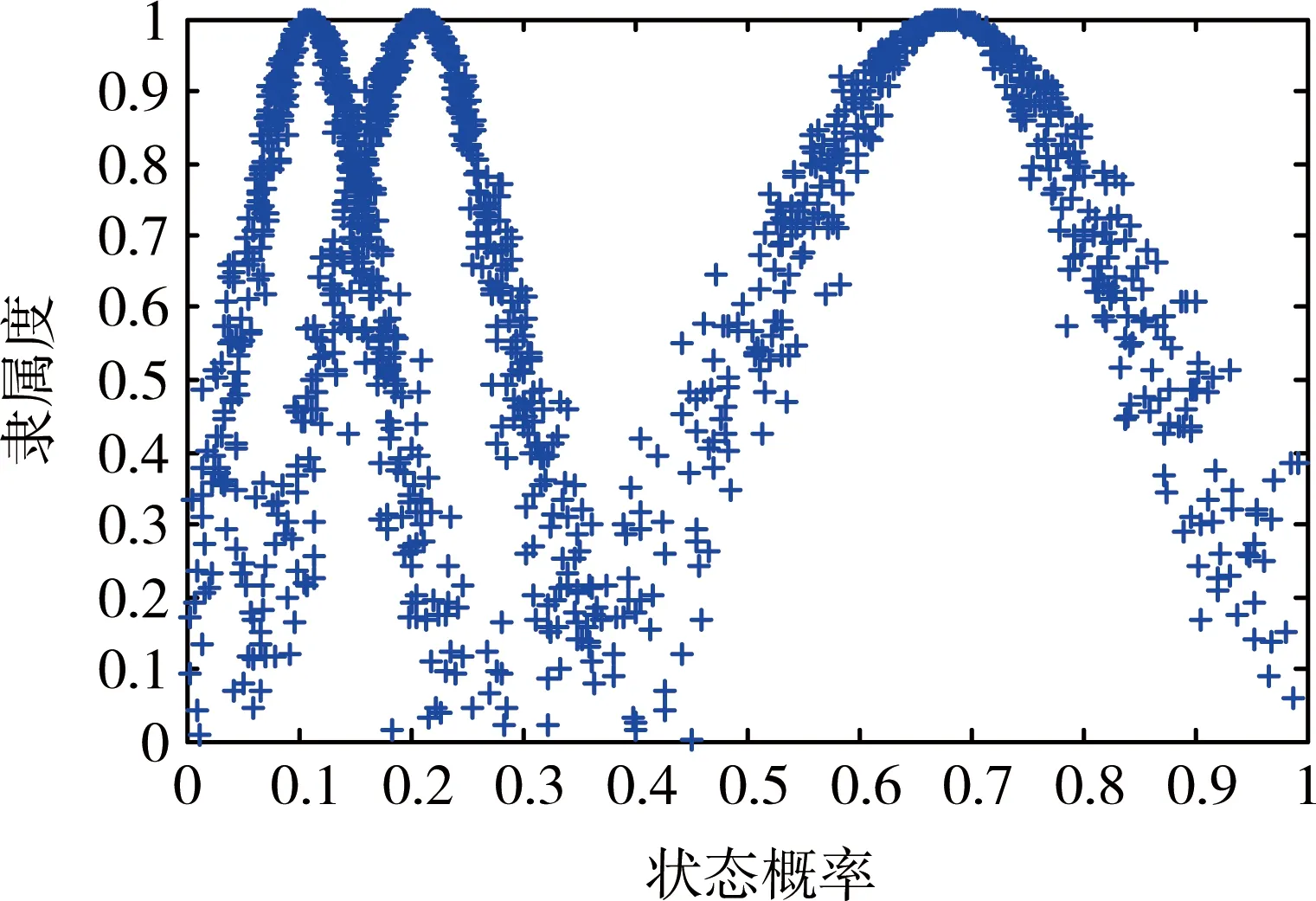
图3 单元2的状态概率正态云

图4 单元3的状态概率正态云


(0.77,0.124 6,0.023 78)gz1.5+
(0.14,0.062 3,0.006 92)gz1+


(0.68,0.114 5,0.031 42)gz2+
(0.21,0.076 5,0.010 62)gz1.5+

(0.94,0.201 3,0.034 12)gz4+
(0.06,0.036 7,0.008 32)gz0。
为了方便编程,应用矩阵来表示各个具有多状态的单元变换函数,其中矩阵的列依次分别为单元各个状态的Ex、En和He,具体如下:

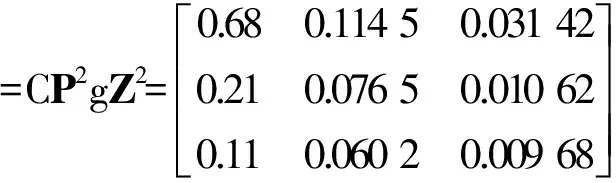

各矩阵之间的运算采用根据前文所定义的运算规则下的特定运算。由于单元1和单元2是并联的,所以采用并联结构函φP来进一步获得二者的CUGF,即
ΩφP(u1(z),u2(z))=
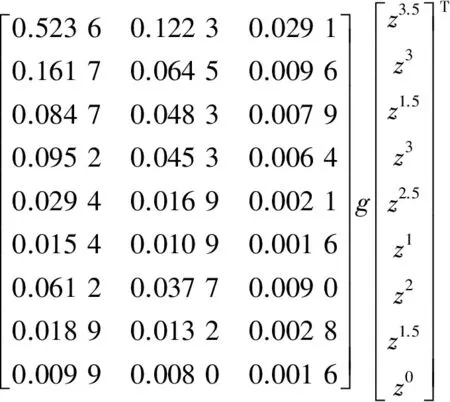
由于单元1和单元2所组成的子系统与单元3是串联,因此整个系统的CUGF为
U(z)=ΩφS(ΩφP(u1(z),u2(z)),u3(z))=

为简化计算,计算过程中可将指数相同的项先合并,然后再计算,但为了程序处理方便,笔者采用先计算后合并的方式。当w=1.5时,该多状态系统的可用度为
(0.502 7,0.157 8,0.033 2)+(0.155 2,0.069 9,0.010 7)+
(0.081 3,0.049 4,0.008 1)+(0.091 4,0.047 5,0.007 0)+
(0.028 2,0.017 3,0.002 2)+(0.058 8,0.038 3,0.008 9)+
(0.018 1,0.013 2,0.002 8)=(0.937 8,0.024 1,0.003 6)。
由此可见:在给定需求的情况下,该多状态系统的稳态可用度云的期望值为0.935 7,与概率情况下该系统的可用度0.940 8相比稍小,但非常接近且都大于所要求的可用度0.9。采用1.2.3节中的正向正态云发生器算法可求出该可用度的云滴,其正态云如图5所示。
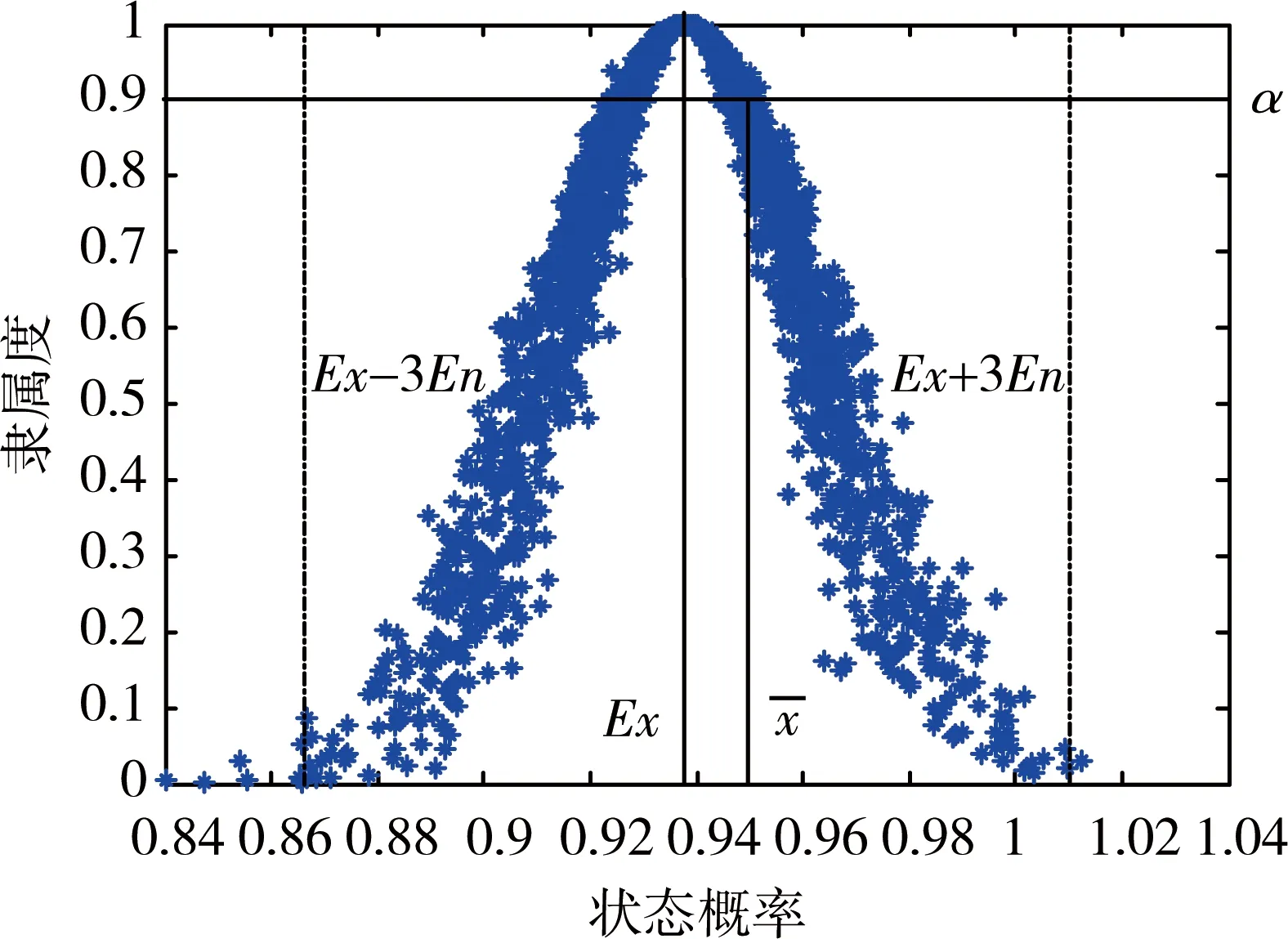
图5 多态系统稳态可用度正态云
在本算例中,评估得到的稳态可用度云为(0.937 8,0.024 1,0.003 6),对该结果判定如下:
Ex-3En=0.937 8-3×0.024 1=0.865 5,
Ex+3En=0.937 8+3×0.024 1=1.010 1,
故当A=0.9时,
Ex-3En≤A≤Ex+3En。
5 结论
针对多状态系统可靠性评估中的不确定性建模问题,提出了应用云模型表示单元或子系统状态概率的随机不确定性和认知不确定性。在概率云模型的基础上扩展了通用生成函数,并给出了多状态系统在给定需求下的系统稳态可用度的求解过程以及可用度云的3个数字特征值。得出的系统稳态可用度云不仅能够定量描述系统可用度,同时还保留了系统可用度的更多细节信息,评估结果准确、可信。笔者提出的研究思路和方法为存在信息或数据的不完整性、不精确性及模糊性的多状态系统可靠性评估提供了一定的借鉴,但在研究中主要考虑了状态概率的不确定性问题,并未涉及单元和子系统的状态存在不确定性的情况,下一步研究将同时考虑单元和子系统的状态和状态概率的不确定性。
[1] Murchland J D.Fundamental Concepts and Relations for Reliability Analysis of Multi-state Systems and Fault Tree Analysis[C]∥Theoretical and Applied Aspects of System Reliability and Fault Tree Analysis,Philadelphia:SIAM,1975:581-618.
[2] Krzysztof K, Joanna S.On Multi-state Safety Analysis in Shipping [J]. International Journal of Reliability, Quality and Safety Engineering, 2007,14(6):547-567.
[3] Massim Y, Zeblah A, Meziane R, et al.Optimal Design and Reliability Evaluation of Multi-state Series-parallel Power Systems[J]. Nonlinear Dynamics,2005,40(4):309-321.
[4] Taboada H A, Espiritu J F, Coit D W.Design Allocation of Multi-state Series-parallel Systems for Power Systems Planning: A Multiple Objective Evolutionary Approach[J].Journal of Risk and Reliability, 2008, 222(3):381-391.
[5] Yeh W C. A Simple Universal Generating Function Method for Estimating the Reliability of General Multi-state Node Networks[J]. IIE Transactions, 2008, 41(1): 3-11.
[6] 黄宁, 伍志韬. 网络可靠性评估模型与算法综述[J]. 系统工程与电子技术, 2013, 35(12): 2651-2657.
[7] Gianni C, Emilio G, Fabrizio P, et al. Reliability Assessment in Smart Distribution Networks [J].Electric Power Systems Research, 2013, 104:164-175.
[8] Zaitseva E, Kovalik S, Levashenko V, et al.Algorithm for Dynamic Analysis of Multi-State System by Structure Function[C]∥Proceedings of the IEEE International Conference on Computer as a Tool, Belgrade:EUROCON, 2005: 1224-1227.
[9] Lisnianski A. Extended Block Diagram Method for a Multi-state System Reliability Assessment[J]. Reliability Engineering & System Safety, 2007, 92(12) : 1601-1607.
[10] Zio E, Marella M, Podofillini L.A Monte Carlo Simulation Approach to the Availability Assessment of Multi-state Systems with Operational Dependencies[J].Reliability Engineering & System Safety, 2007, 92(7): 871- 882.
[11] Li Y F, Zio E. Uncertainty Analysis of the Adequacy Assessment Model of a Distributed Generation System[J]. Renewable Energy, 2012, 41(1):235-244.
[12] Drouin M. Guidance on the Treatment of Uncertainties Associated with PRAs in Risk-informed Decision Making: Main Report[R]. US:Nuclear Regulatory Commission,2009.
[13] Destercke S, Sallak M. An Extension of Universal Generating Function in Multi-state Systems Considering Epistemic Uncertainties[J]. IEEE Transactions on Reliability, 2013, 62(2):504-514.
[14] Li Y F, Ding Y, Zio E. Random Fuzzy Extension of the Universal Generating Function Approach for the Reliability Assessment of Multi-State Systems under Aleatory and Epistemic Uncertainties[J]. IEEE Transactions on Reliability, 2014, 63(1): 13-25.
[15] 李德毅, 杜鹢. 不确定性人工智能[M]. 北京:国防工业出版社, 2005: 229-230.
[16] 李德毅, 刘常昱.论正态云模型的普适性[J]. 中国工程科学, 2004, 6(8): 28-34.
[17] Liu C Y, Feng M, Dai X J, et al. A New Algorithm of Backward Cloud[J]. Journal of System Simulation, 2004, 16(11):2417-2420.
[18] Levitin G, Lisnianski A. Multi-state System Reliability Assessment, Optimization, Applications[M].London:Springer London, 2003:61-90.
[19] Shi Y B, Liu H, Sun J. The Cloud Model Based on Grey System Theory and Application on Effectiveness Evaluation[C]∥Intelligent Computing Theories. Nanning:Springer, 2013:31-38.
[20] Ding Y, Lisnianski A. Fuzzy Universal Generating Functions for Multi-state System Reliability Assessment[J]. Fuzzy Sets and Systems, 2008, 159(3): 307-324.
[21] 汤永利, 徐国爱, 钮心忻, 等.基于信息熵的信息安全风险分析模型[J]. 北京邮电大学学报, 2008, 31(2): 50-53.
(责任编辑:王生凤)
Reliability Assessment of Multi-state Systems Based on Cloud Model
GAO Long1, SONG Tai-liang2, YAN Xu1
(1. Department of Technical Support Engineering, Academy of Armored Force Engineering, Beijing 100072, China; 2. Defense Science Technology Information Center, Beijing 100142, China)
This paper studies the method of reliability evaluation of the multi-state systems aimed at the problems of uncertainties, in which the uncertainties of aleatory and epistemic of the state probability are presented by the cloud model. The Universal Generating Function (UGF) is further expanded on the basis of the cloud probability model, then a Cloud Universal Generating Function (CUGF) is formed, its two kinds of operations are defined, and the process of the solution and three cloud digital features of the cloud model of the availability for the multi-state systems in a given demand are provided. Finally, the accuracy and feasibility are verified by the examples of series-parallel multi-state system of the 3-unit and comparision of the assessment result based on probability theory. The research provides a new thought and method to deal with the incomplete, inaccuracy, fuzzy information and data in reliability evaluation of the multi-state systems.
multi-state systems; reliability evaluation; cloud model; uncertainty
1672-1497(2016)05-0100-07
2016-06-13
军队科研计划项目
高 龙(1988-),男,博士研究生。
TB114.3
A
10.3969/j.issn.1672-1497.2016.05.021
猜你喜欢
法律方法(2022年2期)2022-10-20
舰船科学技术(2022年10期)2022-06-17
矿产勘查(2020年6期)2020-12-25
电子制作(2019年20期)2019-12-04
英语文摘(2019年6期)2019-09-18
中国外汇(2019年7期)2019-07-13
数学学习与研究(2019年8期)2019-06-21
玩具世界(2019年6期)2019-05-21
电子技术与软件工程(2016年24期)2017-02-23
电子制作(2016年21期)2016-05-17
