高速视频的运动目标特征信息值提取算法
2016-03-10 00:46:48侯宏录赵正川
西安工业大学学报 2016年12期
袁 云,侯宏录,赵正川
(西安工业大学 光电工程学院 ,西安 710021)
高速视频的运动目标特征信息值提取算法
袁 云,侯宏录,赵正川
(西安工业大学 光电工程学院 ,西安 710021)
为了准确获取运动飞碟的运动目标特征值,在研究相机帧频为100 fps基础上,以采集到运动目标图像的质心为中心,以图像的行、列像素为特征向量,构建运动目标的特征信息值.实验结果表明:运动目标特征值提取算法能够准确提取出运动目标的特征值,处理时间为60 ms左右.
运动目标;状态识别;高帧频;特征向量
运动目标状态识别技术广泛应用于军事、交通、体育项目和智能监控等领域,通过实时分析运动目标的状态信息,可为相应工作提供有价值的技术参考.运动目标特征值的提取是状态识别技术的核心部分,因此研究基于高速视频的运动目标特征值的提取尤为重要.基于图像的目标特征值提取算法主要包括基于目标形状特征的提取算法,基于目标边缘特征的提取算法,基于目标分割特征的提取算法以及基于图像纹理特征的提取算法等[1].文献[2]选用了符合人类视觉特性的HSV颜色模型 (Hue Saturation Value,HSV)作为运动目标的特征信息值,并且利用人对颜色的感知,将HSV空间颜色分量进行非等间隔量化并形成特征矢量,以图像中目标的颜色作为其特征值.文献[3]利用一种基于圆环划分法来提取船舶的特征值,所得到的船舶特征值具有旋转、平移及缩放(Rotate Scale Translation,RST).文献[4]采用一种比例半径法求取卟啉的特征值,通过选取合适的加权比例系数,缩放卟啉的半径值,以缩放后的半径值作为每个卟啉的特征信息值.本文在对运动目标图像进行灰度处理的基础上,以运动目标图像的质心为中心,在水平和垂直方向上分别设定像素窗口,将窗口内的水平和垂直像素向量进行拼接,利用拼接而成的向量组作为运动目标的特征值.
1 算法原理
本文提取的运动目标特征信息值包括运动目标图像的质心和运动目标图像的特征向量.
1.1 找矩原理
求取运动目标图像的质心过程即为找矩,采用图像HSV空间的亮度(luminance)值求取图像的平均质心是常用的找矩算法.基本原理为:在图像HSV空间内亮度值的变化范围为0~1,其值越大,表示此像素点的亮度值越高,由于前景图像和背景图像的亮度值有明显的差异,前景图像几乎涵盖了大部分的亮度值.因此,找到HSV空间亮度值的中心位置即可认为是图像的质心位置.找矩过程示意图如图1所示.
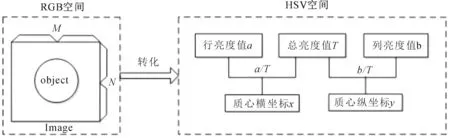
图1 找矩过程示意图
一幅分辨率为M×N的图像,其质心坐标表达式为
(1)
(2)
式中:M为图像的行值;N为图像的列值;luminance为在HSV空间求取的亮度值;a为图像
行亮度值;b为图像列亮度值;x为图像的质心横坐标;y为图像质心的纵坐标.根据式(1)和式(2)即可求出运动目标图像的质心坐标.
1.2 特征向量生成原理
基于灰度图像的目标特征向量生成原理:同一运动目标在不同姿态下拍摄得到的图像均不一致,经过图像增强处理之后的灰度图像也不会完全相同.由此可得,不同姿态下前景图像的行、列像素值均不一致.因此,采用图像行、列像素向量作为运动目标的特征向量可表示不同姿态下的同一运动目标.特征向量生成示意图如图2所示.
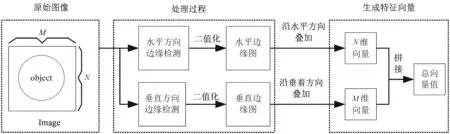
图2 特征向量生成示意图
一幅分辨率为M×N的灰度图像由M行和N列组成,对图像进行行、列扫描,将每行的像素值累加,得到N维向量组V1;将每列的像素值叠加,得到M维向量组V2,为了缩短算法的处理时间,将两个方向的向量进行拼接处理,最终生成运动目标的特征向量.
2 特征值求取步骤
运动目标特征值的求取主要包括图像预处理,运动目标的检测与提取和特征向量的生成三个步骤.
2.1 图像预处理
一般的图像处理过程如图3所示,图像输入之后的第一个处理过程即为图像预处理,在图像预处理完毕之后才能进行更高级别的图像操作,如图像分割与图像识别.因此,对输入图像的预处理十分重要.在图像预处理阶段,主要涉及到图像的灰度化处理.在本文算法中,由于彩色图像所携带的有用信息与灰度图像所携带的有用信息一致,但是彩色图像采用的是RGB色调,其冗余信息较多,因此需要将采集得到的图像先进行灰度化处理,减少其冗余信息量.
图像预处理中,灰度图像只用单一的灰度值表示图像的有用信息,而RGB图像则需要采用红、绿、蓝三基色表示一个像素点的有用信息,每个基色又有255种可取值.因此,如果采用RGB三基色表示图像的有用信息,则一个像素点的取值就有255×255×255种可取值,每个像素点的数据量相当庞大.然而对图像灰度化处理后,图像的数据量和运算时间都会减少.灰度图像的亮度Y与R,G及B之间的转换关系为
Y=0.3R+0.59G+0.11B
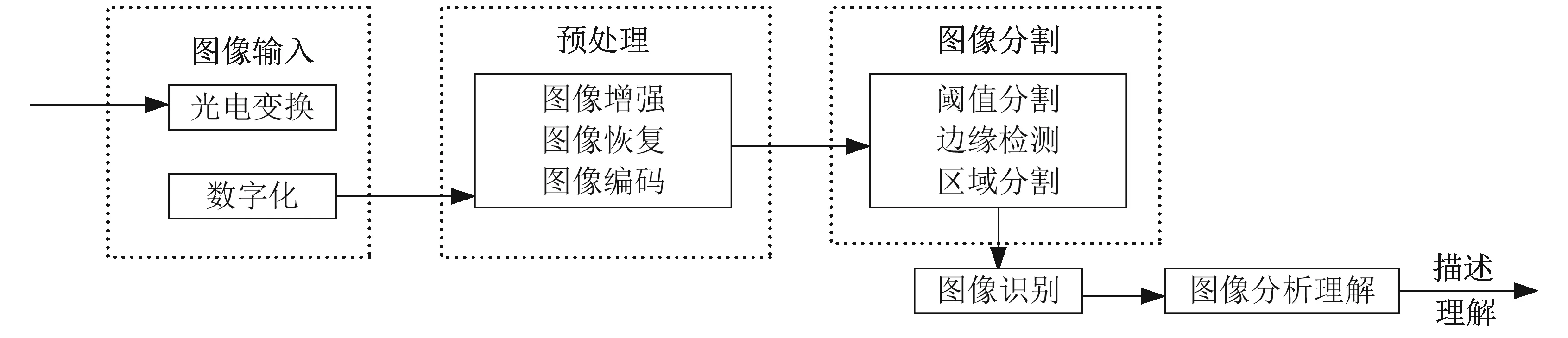
图3 一般的图像处理过程
2.2 运动目标的检测与提取
目前基于图像的前景提取算法主要有背景差分法[5]、时间差分法[6]、光流法以及基于统计的方法[7].当背景较为单一时,采用背景差分法来提取前景效果最理想,本文采用背景差分法求取前景.其基本原理为:首先用图像采集装置采集干净的背景图像,然后将带有前景的图像与背景图像对应像素点进行差分,差分之后的结果即为提取出的前景.
背景差分法运算公式为
前景物体=包含前景的图像-背景图像
(3)
用I(x,y)表示图像中一点的灰度像素值,差分法提取前景物体的计算公式为
I前景(x,y)=I(x,y)-I背景(x,y)
(4)
图4(a)~4(c)为采集系统连续采集运动乒乓球拍的第90帧、100帧和110帧图像,图4(d)~4(f)为通过背景差分法提取出第90帧、100帧和110帧图像中运动的乒乓球拍.
2.3 特征向量的生成
运动特征向量生成主要分为寻找运动目标图像的质心和运动目标特征向量的生成.
1)找矩过程
找矩过程即为求取运动目标图像质心过程.一幅分辨率为M×N的图像,找矩过程为
① 将图像转换到以色调H、饱和度S、亮度V为参数的HSV空间中.
② 在V空间求取图像的总亮度值T,行亮度值与M/2差值的总和Xw,列亮度值与N/2差值的总和Yw.
③ 横坐标计算公式为Xc=Xw/T,纵坐标计算公式为Yc=Yw/T.
2)特征向量的生成
① 分别将图像水平和垂直方向上的像素叠加,得到N维列像素集合V1,M维行像素集合V2,计算公式为
定义:V1={V1(1),V1(2),…,V1(N)}
(5)

(6)
定义:V2={V2(1),V2(2),…,V2(M)}
(7)

(8)
② 在V1中以(Yc+N/2)为中心上下各截取a维向量,得到(2a+1)维向量组V3;在V2中以(Xc+M/2)为中心左右各截取a维向量,得到(2a+1)维向量组V4.
③ 将向量组V3和V4进行拼接运算,得到一个(4a+2)维的新向量组V5,则V5向量组即为所求的特征向量.计算公式为
V5=V3∪V4
(9)
截取的a维向量需包含图像的所有有用像素值点,且a是个变量,其值需要根据不同运动目标的图像进行扩大或者是缩小等变化.例如运动目标距离摄像头1.5 m时,a取值为200维,当运动目标距离摄像头3 m时,a取值为100维.
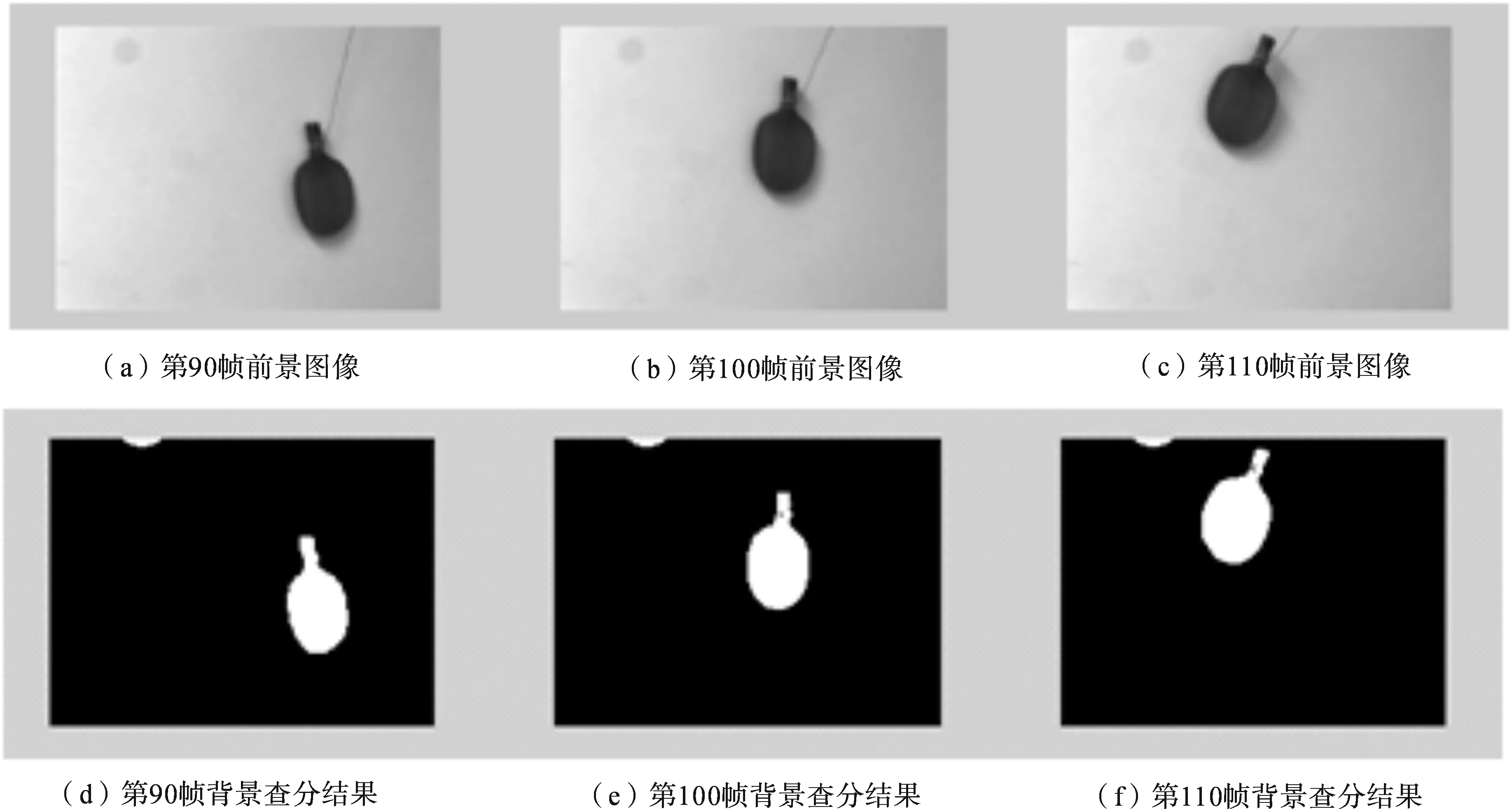
图4 背景差分法提取前景物体过程及结果
3 实验结果与分析
3.1 找矩过程及结果分析
根据前文提出的寻找图像质心的原理与步骤,拍摄运动飞碟图像,在Matlab R2013A开发环境下编程寻找运动目标图像的质心.采用德国BASLER公司的acA2000-60gc型CMOS高帧频相机(分辨率为1 280 pixel×1 024 pixel,最高帧频可达100 fps)拍摄运动中的飞碟,寻找飞碟图像过程及结果如图5所示.
根据图5(b)~5(d)可知,当把原始RGB图像分别转换到H、S和V空间后,只有亮度空间V能够准确的描述原始图像的有用信息.根据图5(e)显示,在转换后的V空间能够准确寻找出图像的质心.综合分析可知,将RGB图像转换到V空间中寻找图像的质心,能够有效、准确地提取出运动目标图像的质心.
3.2 特征向量提取过程及结果分析
根据前文提出的特征向量提取原理与步骤,拍摄运动飞碟的图像,并在Matlab R2013A开发环境下编程提取运动中飞碟图像的特征向量.特征向量提取的过程及结果如图6~7所示.
根据图7所示的特征向量生成结果显示,以图像质心为中心,在1 280维行向量及1 024维列向量上分别各截取400维向量,经过拼接得到802维向量,这个拼接的向量能够完整的涵盖图像的所有有用信息,且在Matlab实时工具里显示其处理时间为58 ms.
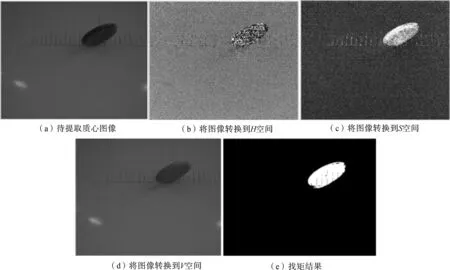
图5 提取运动飞碟图像质心的过程及结果

图6 特征向量生成过程
图7 特征向量生成结果
4 结 论
采用背景差分法提取运动目标能够简单、高效地提取图像中的前景物体;将RGB原始图像转换到以亮度值表示图像有用信息的V空间,利用平均亮度的算法检测出了图像的质心;在检测出图像质心的基础之上,通过在水平和垂直像素上设定像素窗口,将窗口内的两组像素进行拼接,采用拼接而成的像素向量作为运动目标的特征向量.通过实验验证,本文所使用的运动目标图像质心检测算法及运动目标特征向量构建算法,能够准确、高效地达到提取运动目标特征值的目的.
[1] 李炜承,胡钊政,初秀民.基于图像处理的内河船舶目标提取与特征值计算[J].交通信息与安全,2015,33(3):1.
LI Weicheng,HU Zhaozheng,CHU Xiuming.Vessel Object Extraction and Feature Value Calculation in Inland Waterway Based on Image Processing[J].Traffic Information and Security,2015,33(3):1. (in Chinese)
[2] 罗小刚,汪德暖,候长军,等.卟啉传感阵列图像特征值自动提取算法[J].重庆大学报,2014,35(4):33.
LUO Xiaogang,WANG Denuan,HOU Changjun,et al.Automatic Feature Extraction Algorithm for Porphyrin Sensor Array Images[J].Journal of Chongqing University,2014,35(4):33.(in Chinese)
[3] 章毓晋.图像处理与分析[M].北京:清华大学出版社,1999.
ZHANG Yujin.Image Processing and Analysis[M].Beijing:Tsinghua University Press,1999. (in Chinese)
[4] 刘鹏宇.基于内容的图像特征提取算法的研究[D].长春:吉林大学,2004.
LIU Pengyu.Study on the Algorithms for Content-based Image Feature Extraction[D].Changchun:Jilin University,2004.(in Chinese)
[5] 张建华.基于灰度的模板匹配算法研究[D].呼和浩特:内蒙古农业大学,2013.
ZHANG Jianhua.Study on Template Matching Algorithm Based on Gray Value[D].Hohhot: Inner Mongolia Agriculture University,2013.(in Chinese)
[6] 唐琎,李青.一种快速的模板匹配算法[J].计算机应用,2010,30(6):1559.
TANG Jin,LIQing.Fast Template Matching Algorithm[J].Journal of Computer Application,2010,30(6):1559.(in Chinese)
[7] 晁志超,伏思华,姜广文,等.单目摄像机-激光测距传感器位姿测量系统[J].光学学报,2011,31(3):0312001.
CHAO Zhichao,FU Sihua,JIANG Guangwen, et al.Mono Camera and Laser Rangefinding Sensor Position-Pose Measurement System[J].Journal of Optics,2011,31(3):0312001.
(责任编辑、校对 潘秋岑)
【相关参考文献链接】
李晋惠,容慧.一种静态背景下的运动目标检测算法研究[J].2008,28(6):573.
侯宏录,齐晶晶.高速数据的跨时钟域处理方法及验证[J].2015,35(6):434.
侯宏录,杜鹃,王蓉.高帧频CMOS相机数据传输系统设计及仿真[J].2011,31(1):14.
王全,王长元,穆静,等.车辆行车实时目标区域特征提取及分类训练[J].2015,35(11):888.
张建生,崔红,常洋,等.尾流特征图像提取的数学形态学方法[J].2012,32(12):987.
刘萍.基于图像的产品缺陷特征提取方法[J].2012,32(9):707.
姚红革,杜亚勤,刘洋.基于小波分析和BP神经网络的图像特征提取[J].2008,28(6):568.
张宇萍.基于Fisher准则的二次线性特征提取[J].2007,27(5):460.
张超.正交小波变换在钻削刀具状态特征提取中的应用[J].2007,27(3):223.
Algorithm to Get the Characteristic Information Value for Moving Target Based on High Speed Video
YUANYun,HOUHonglu,ZHAOZhengchuan
(School of Optoelectronic Engineering,Xi’an Technological University,Xi’an 710021,China)
In order to obtain the characteristic value of moving targets of the flying saucer,for the camera frame rate of 100 fps,the characteristic feature of the moving target is extracted,taking the collected moving target image centroid as the center and the row and column of pixels as eigenvector of the image.The experimental results show that the proposed algorithm achieves accuracy extracting characteristic values of the moving target, and the processing time is 60 ms.
moving target;state recognition;high frame rate;feature vector
10.16185/j.jxatu.edu.cn.2016.12.003
2015-12-09
陕西省科学技术研究发展计划(2011K06-22)
袁 云(1991-),女,西安工业大学硕士研究生.
侯宏录(1960-),男,西安工业大学教授,主要研究方向为光电测试、信息融合、复杂系统工程建模及仿真与作战效能评估. E-mail:hlhou@sina.com.
TB615
A
1673-9965(2016)12-0959-06
猜你喜欢
九江职业技术学院学报(2022年1期)2022-12-02 09:46:54
汽车实用技术(2022年14期)2022-07-30 06:24:26
保定学院学报(2022年2期)2022-04-07 02:26:50
北京航空航天大学学报(2021年4期)2021-11-24 01:13:12
数学物理学报(2021年5期)2021-11-19 07:01:12
烟台大学学报(自然科学与工程版)(2021年1期)2021-03-19 08:38:40
许昌学院学报(2018年4期)2018-05-02 12:27:37
中华建设(2017年1期)2017-06-07 02:56:14
东北电力大学学报(2015年1期)2015-11-13 05:20:25
四川轻化工大学学报(自然科学版)(2014年3期)2014-04-16 03:56:42