
基于MRAS参数辨识的PMSM无速度传感器控制*
2016-02-26 01:19韩世东张广明朱晓虹刘小俊孙明山
电机与控制应用 2016年1期
关键词:永磁同步电机
韩世东, 张广明, 梅 磊, 朱晓虹, 刘小俊, 孙明山
(1. 中国科学院 苏州生物医学工程技术研究所,江苏 苏州 215163;
2. 南京工业大学,江苏 南京 211816)
基于MRAS参数辨识的PMSM无速度传感器控制*
韩世东1,2,张广明2,梅磊2,朱晓虹1,2,刘小俊2,孙明山1
(1. 中国科学院 苏州生物医学工程技术研究所,江苏 苏州215163;
2. 南京工业大学,江苏 南京211816)
摘要:研究了在无速度传感器控制条件下,基于MRAS的永磁同步电机参数辨识系统。针对目前多参数在线辨识遇到的欠秩问题,提出了一种固定部分参数分两步估计电机转速、定子电阻和永磁体磁链的辨识方法,分别推导了同时辨识的参数自适应律,确保参数估计收敛性和唯一性。仿真结果表明: 该控制系统在负载突变下能准确跟踪转子的速度,具有良好的鲁棒性和动、静态性能,同时降低了参数敏感性。
关键词:永磁同步电机; 模型参考自适应; 无传感器控制; 参数辨识
0引言
近年来,永磁同步电机(Permanent Magnet Sy-nchronous Motor, PMSM)在许多高性能调速场合得到了广泛应用。对转子位置和速度的准确测量是保证PMSM高性能控制的前提,直接购买的PMSM大多自带了与电机轴相连的编码器,无疑增加电机的体积和成本,且这些速度或位置传感器对温度、湿度等周围环境要求较高。因此,无速度传感器技术成为电机控制研究的热点问题之一。
目前,PMSM的无速度传感器技术大致可以分为这几类: (1) 基于反电动势(Back-EMF)的方法;(2) 高频信号注入的方法;(3) 基于状态观测器的方法;(4) 基于模型参考自适应(Model Reference Adaptive System, MRAS)的技术。无传感器控制算法种类繁多,但本质上除(2)外,均是基于PMSM数学模型中参数的方法,这类方法对电机参数极其敏感。无位置传感器PMSM系统的关键技术就是基于电机的准确参数,利用电压和电流估算出电机转子的位置和速度。电机参数的准确程度将影响着位置和速度的估算精度,进而直接影响着系统的控制性能[1]。因此,在PMSM无速度(位置)传感器控制领域,对电机参数(包括: 电子电阻Rs、定子电感Ls、永磁体磁链φf)的在线辨识尤为重要。
结合提及的无速度传感器技术各自的优缺点,本文选择算法简单、易于实现的MRAS作为速度辨识算法。MRAS利用两个不同的模型(参考模型和可调模型)之间的误差,通过自适应律来估计未知参数,但是同样存在对模型参数敏感的问题。针对MRAS的这一问题,国内外学者提出了一些解决方案。文献[2-3]分别采用了不同的可调模型估计转速ωr的同时,实现了定子电阻Rs的在线估计,一定程度上降低了参数敏感性;文献[4-5]在有传感器情况下,分别利用Popov 超稳定理论和Lyapunov稳定性理论构建MRAS自适应律,提出了对电阻、电感、永磁磁链的同时在线辨识,但由于电机模型是秩小于3的,其无法保证能获得唯一解,仅能在特定情况下使估计值收敛;文献[6]在利用MRAS进行无位置控制中,明确指出定子电阻Rs和永磁体磁链φf不可能同时辨识出来;而文献[7]利用MRAS系统对转子位置和转速进行估算,提出基于扩展卡尔曼滤波器(EKF)的PMSM永磁磁链辨识方法,很好地避免了上述电机低阶状态方程引起的辨识欠秩问题,降低转子位置的估算误差。
在已有文献取得的进展基础上,本文提出一种基于MRAS系统分两步在线辨识PMSM的定子电阻Rs和永磁体磁链φf的无速度传感器算法(包括转速和位置参数估计)。整个控制系统一分为二,一方面设定永磁磁链φf为额定值,在线辨识转速ωr和定子电阻Rs;另一方面设定定子电阻Rs为额定值,在线辨识转速ωr和永磁磁链φf。辨识参数在线修改电机定子电阻和永磁体磁链,确保了电机模型中使用的各项参数的准确性,提高了转速(位置)辨识的精度。由于采用两步来进行多参数在线辨识,解决了之前文献所遇到的电机方程欠秩问题以及多参数估计的交叉耦合问题,确保参数估计收敛性和唯一性,降低了整个MRAS系统的参数敏感性。
1PMSM的建模及参数辨识的欠秩问题
1.1PMSM的数学模型
PMSM在dq轴旋转坐标系下的电压方程为
(1)
式中:ud、uq、id、iq——分别为定子dq轴的电压和电流;
Rs、L——定子电阻和电感;
ωe——转子电角速度;
ψd、ψq——定子磁链在dq轴方向上的分量。
磁链方程为
(2)
式中:ψf——永磁体产生的磁链,对于表贴式PMSM有Ld=Lq=L。
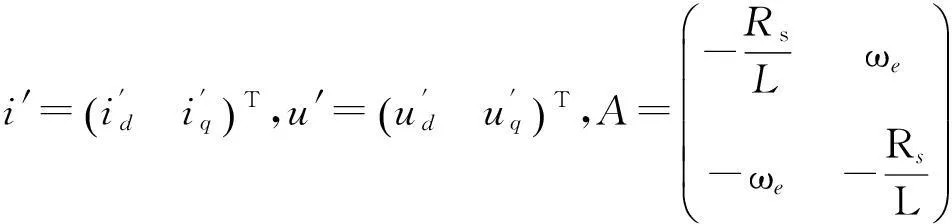
MRAS辨识系统一般将电流作为状态量,将式(2)代入式(1)并整理得状态方程为
(3)
1.2PMSM多参数在线辨识欠秩问题的分析及解决方案
PMSM的参数辨识一般围绕三个电机参数: 即定子电阻Rs、永磁磁链φf、电感L。无速度传感器控制中,估计参数还包括转速ωr和位置θ。正常工作情况下,温度上升将导致定子电阻变大和永磁体磁链下降,严重时甚至出现高温失磁的现象,严重影响电机性能。这导致PMSM无位置传感器控制非常依赖电机参数的实时在线辨识。但是不对电机施加任何扰动的情况下同时精确辨识永磁体磁链和定子电阻,仍然是一个世界难题[8]。
对式(3)做定性分析,PMSM数学模型可以看成2维线性方程组,上文分析电机模型中有5个未知参数,所以方程组欠秩,有解,但不唯一。所以文献[4-5]的3个及以上参数同时在线辨识只能在特定参数下进行,每次改变算法参数初始值设置必然会获得不同的定子电阻和永磁磁链幅值,其根本原因是因为辨识算法所基于的参考/可调模型是欠秩的。凭借无数个电流电压采样值,的确能将多个参数同时辨识出来,但是其结果的收敛性和唯一性缺乏理论依据[8]。
针对多参数辨识的欠秩问题,本文提出部分电机参数设为固定值分步进行辨识。一般情况下,PMSM电感的电压降误差远小于反电势,磁饱和造成的电感变化对算法的影响相对有限[9],故电感均设为额定值。方案中,一方面固定磁链φf,在线辨识转速ωr和电阻Rs;另一方面,固定电阻Rs,在线辨识转速ωr和磁链φf,使其状态方程满秩,确保参数辨识的唯一性和准确性。
2基于MRAS参数辨识的PMSM速度辨识方案

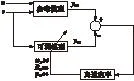
图1 MRAS转速估计原理框图

(4)
简写为
(5)
简写为
(6)
(7)
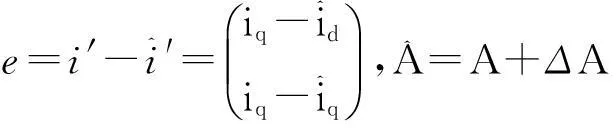
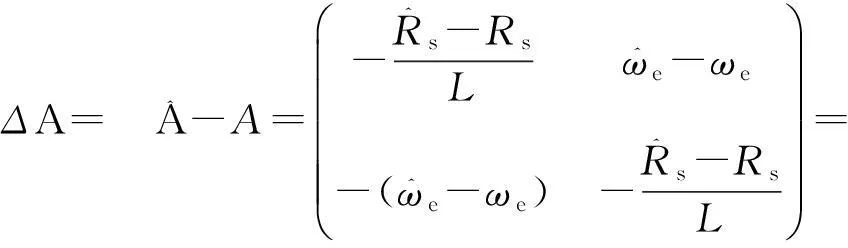
式(6)减式(7)可得误差方程:
(8)
根据式(8),可得一个标准反馈系统,如图2所示。其中D为增益矩阵,简化计算,这里取D=I(单位矢量)。式(3)中,ωe是时变的,但由于机械时间常数远大于电气常数,故可认为在每一个采样周期内,ωe维持不变。所以,图2上半部分为一线性时不变前馈系统(LTI)。寻找自适应矢量V与反馈矢量W时,先用一个非线性时变反馈系统(LTV)来连接。这样就得到图2所示的等效反馈系统。

图2 等效的非线性反馈系统
根据Popov超稳定理论,若系统渐近稳定,则图2所示非线性时变环节必须满足Popov不等式[10],即

(9)
式中: γ2——一个有限正数。
(10)
(11)


(12)
(13)
接下来考虑永磁体磁链、固定电阻Rs、在线辨识转速ωr和磁链φf,关键在于磁链φf自适应律的确定。对式(3)进行简单变换,得
(14)
简写为

(15)

(16)

(17)
这样就分两步,采用固定部分参数的方法完成了电机转速、定子电阻、永磁磁链的同时在线辨识,基于参数辨识的MRAS转速辨识系统的结构如图3所示。
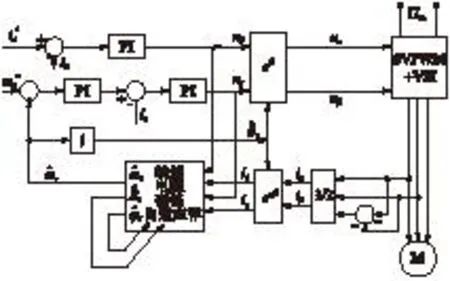
图3 基于MRAS参数辨识的转速估计系统结构框图
3仿真研究
本文利用MATLAB/Simulink来验证所提出的基于MRAS参数辨识的PMSM速度辨识算法。电机参数如下: 额定功率PN=1.1kW,相电压220V,定子电阻Rs=0.18Ω,绕组电感Ld=Lq=8.35mH,永磁体磁链φf=0.175Wb,转动惯量J= 0.00062kg·m2,极对数p=1。
仿真试验中,为了验证辨识算法在负载情况下的速度跟踪性能,仿真参数设置如下: 仿真时长0.3s;t=0.15s时,负载转矩由初始5N·m突变为10N·m。图4(a)给出了转速响应波形,可知: 在0.15s负载突变后,经约50ms后转速又稳定到初始设定转速。图4(b)是整个过程中转速误差波形,可以看出除起动过程外整个系统转速误差很小,突变时误差也控制在15rad/s以内。图4(c)和4(d)分别为电阻Rs和永磁体磁链φf的在线辨识波形,起动和负载突变阶段两者均有不同程度的波动,但在较短时间内能稳定到实际值。
由仿真试验可以看出,本文所提出的基于MRAS参数辨识的PMSM速度辨识方案在确保参数辨识收敛性和唯一性的同时,利用辨识结果在线修改电机定子电阻和永磁体磁链,能够较好地完成对转速辨识和电机转子空间位置的估计,具有误差小、跟踪精度高的特点,估计速度与实际速度基本重合,负载的突变虽产生一定超调,但均能很快恢复,稳态误差基本为0。仿真试验验证了本文设计方案的有效性。
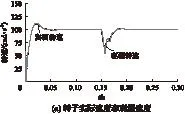
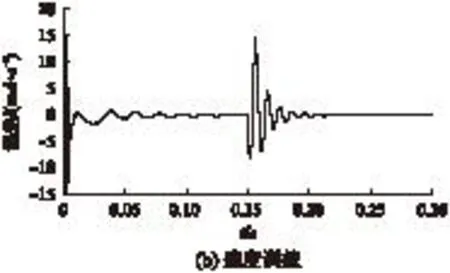
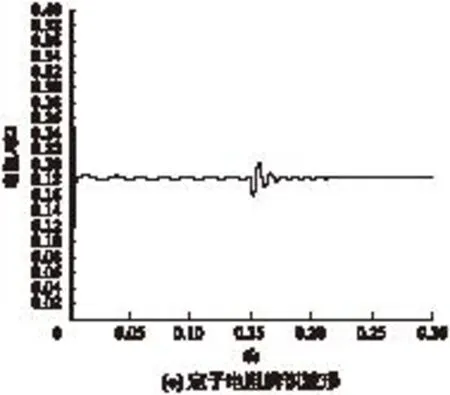

图4 负载扰动时的仿真波形
4结语
为了降低电机无传感器控制时的参数敏感性,同时针对多参数在线辨识遇到的电机方程欠秩及交叉耦合问题,本文研究了一种基于MRAS参数辨识的PMSM转速辨识方案。采用两步法,解决了由于电机模型欠秩可能导致的估计值不唯一问题。辨识参数在线修改电机定子电阻和永磁体磁链,确保了电机模型中使用的各项参数的准确性,降低了MRAS系统对参数的敏感性。仿真结果验证了所提出的方案在负载突变下均能准确跟踪转子的速度,对参数变化具有较强的鲁棒性,提高了转速辨识的精度。
【参 考 文 献】
[1]周虎.永磁同步电机参数在线辨识算法研究[D].成都: 电子科技大学,2012.
[2]齐放,邓智泉,仇志坚,等.一种永磁同步电机无速度传感器的矢量控制[J].电工技术学报,2007,22(10): 30-34.
[3]郑安平,程福春,张智强.一种改进的永磁同步电机矢量控制MRAS方案[J].郑州轻工业学院学报,2014,29(4): 46-49.
[4]安群涛,孙力,赵克.一种永磁同步电动机参数的自适应在线辨识方法[J].电工技术学报,2008,23(6): 31-36.
[5]陈振锋,钟彦儒,李洁.嵌入式永磁同步电机自适应在线参数辨识[J].电机与控制学报,2010,14(4): 9-13.
[6]RASHED M, MACCONNELL P F A, STRONACH A. Sensorless indirect-rotor-field-orientation speed control of a permanent-magnet synchronous motor with stator-resistance estimation[J]. IEEE Trans Ind Electron, 2007,54(3): 1664-1675.
[7]史宇超,孙凯,马鸿雁,等.内埋式永磁同步电机永磁磁链的在线辨识[J].电工技术学报,2011,26(9): 48-53.
[8]刘侃.永磁同步电机多参数在线辨识研究[D].长沙: 湖南大学,2011.
[9]王子辉.永磁同步电机全速度范围无位置传感器控制策略研究[D].杭州: 浙江大学,2012.
[10]王成元,夏加宽,孙宜标.现代电机控制技术[M].北京: 机械工业出版社,2008.
Sensorless Control of PMSM Based on Parameter Identification MRAS
HANShidong1,2,ZHANGGuangming2,MEILei2,ZHUXiaohong1,2,
LIUXiaojun2,SUNMingshan1
(1. SIBET,Chinese Academy of Sciences, Suzhou 215163, China;
2. Nanjing Tech University, Nanjing 211816, China)
Abstract:The parameter identification system of permanent magnet synchronous motor based on MRAS under the condition of speed sensorless control was studied. In order to address the problem of deficient-rank in multi-parameter on-line identification. A two-step method that fixes part of the parameters to estimates motor speed, stator resistance and permanent magnet flux was proposed. The parameter adaptive laws were derived respectively in order to ensure the convergence and uniqueness of the parameter estimation. The simulation results showed that the control system could accurately track the speed of the rotor under the load transient change, and has good robustness, with reduced sensitivity on the parameters.
Key words:permanent magnet synchronous motor(PMSM); model reference adaptive system(MPAS); sensorless control; parameter identification
收稿日期:2015-08-31
中图分类号:TM 301.2
文献标志码:A
文章编号:1673-6540(2016)01- 0007- 05
作者简介:韩世东(1990—),男,硕士研究生,研究方向为电力电子与电力传动和电机控制。张广明(1965—),男,教授,研究方向为智能控制及其应用和新能源及其控制的研究。
*基金项目:国家自然科学基金(51277092,51307080);国家科技支持计划(2015BAI03B03)
梅磊(1979—),男,副教授,研究方向为飞轮储能技术,电机起动/发电技术、磁悬浮轴承技术。
猜你喜欢
现代电子技术(2017年1期)2017-02-16
汽车工程学报(2016年5期)2017-01-16
计算技术与自动化(2016年4期)2017-01-11
电脑知识与技术(2016年13期)2016-06-29
科技视界(2016年12期)2016-05-25
电脑知识与技术(2016年2期)2016-03-22
电脑知识与技术(2016年1期)2016-03-22
哈尔滨理工大学学报(2015年6期)2016-02-18
哈尔滨理工大学学报(2015年3期)2015-09-21
科技与创新(2015年18期)2015-09-11
